水下机器人-自主航行器AUV-LAUV介绍
无缆自治水下机器人
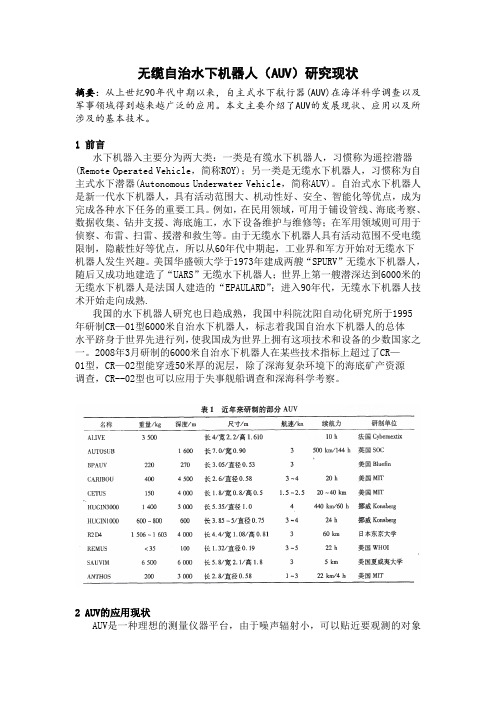
无缆自治水下机器人(AUV)研究现状摘要:从上世纪90年代中期以来,自主式水下航行器(AUV)在海洋科学调查以及军事领域得到越来越广泛的应用。
本文主要介绍了AUV的发展现状、应用以及所涉及的基本技术。
1 前言水下机器入主要分为两大类:一类是有缆水下机器人,习惯称为遥控潜器(Remote Operated Vehicle,简称ROY);另一类是无缆水下机器人,习惯称为自主式水下潜器(Autonomous Underwater Vehicle,简称AUV)。
自治式水下机器人是新一代水下机器人,具有活动范围大、机动性好、安全、智能化等优点,成为完成各种水下任务的重要工具。
例如,在民用领域,可用于铺设管线、海底考察、数据收集、钻井支援、海底施工,水下设备维护与维修等;在军用领域则可用于侦察、布雷、扫雷、援潜和救生等。
由于无缆水下机器人具有活动范围不受电缆限制,隐蔽性好等优点,所以从60年代中期起,工业界和军方开始对无缆水下机器人发生兴趣。
美国华盛顿大学于1973年建成两艘“SPURV”无缆水下机器人,随后又成功地建造了“UARS”无缆水下机器人;世界上第一艘潜深达到6000米的无缆水下机器人是法国人建造的“EPAULARD”;进入90年代,无缆水下机器人技术开始走向成熟.我国的水下机器人研究也日趋成熟,我国中科院沈阳自动化研究所于1995 年研制CR—01型6000米自治水下机器人,标志着我国自治水下机器人的总体水平跻身于世界先进行列,使我国成为世界上拥有这项技术和设备的少数国家之一。
2008年3月研制的6000米自治水下机器人在某些技术指标上超过了CR—01型,CR—02型能穿透50米厚的泥层,除了深海复杂环境下的海底矿产资源调查,CR--02型也可以应用于失事舰船调查和深海科学考察。
2 AUV的应用现状AUV是一种理想的测量仪器平台,由于噪声辐射小,可以贴近要观测的对象(如以设定高度进行海底地形跟踪),因而可以获取采用常规手段不能获取的高质量数据和图像。
自主遥控水下机器人研究现状
自主遥控水下机器人研究现状一、本文概述随着科技的飞速发展,自主遥控水下机器人(AUV,Autonomous Underwater Vehicle)已成为海洋科学研究、海底资源勘探、水下救援等领域的重要工具。
本文旨在探讨自主遥控水下机器人的研究现状,分析其发展动态,并展望未来的发展趋势。
文章将首先介绍自主遥控水下机器人的基本概念和工作原理,然后概述国内外在AUV技术研究方面所取得的主要成就和挑战。
通过对AUV的研究现状进行全面分析,旨在为相关领域的研究人员和工程技术人员提供参考,推动自主遥控水下机器人技术的进一步发展。
二、自主遥控水下机器人技术概述自主遥控水下机器人(AUVR,Autonomous Underwater Vehicle with Remote Control)是近年来海洋科技领域的热门研究方向,其融合了自主导航、环境感知、远程控制以及作业执行等多项关键技术。
AUVR不仅能够在无人干预的情况下,根据预设任务或环境信息进行自主决策和行动,而且还可以通过远程操控,实现对机器人的精确控制,以应对复杂多变的海洋环境。
在自主导航方面,AUVR通常采用基于声纳、激光雷达、视觉等多种传感器的融合技术,以实现水下三维空间的精确定位与导航。
随着人工智能技术的发展,一些AUVR已经开始应用深度学习、强化学习等算法,提高其在水下环境的自主导航能力。
环境感知是AUVR实现自主作业和远程控制的关键技术之一。
通过搭载多种传感器,AUVR可以实现对水下温度、盐度、流速、水质等环境参数的实时监测,以及水下地形、地貌、生物等信息的获取。
这些环境感知数据不仅为AUVR的自主决策提供依据,也为远程操控者提供了直观的水下环境信息。
远程控制技术的发展为AUVR在复杂环境下的作业提供了有力支持。
通过无线通信技术,操控者可以实现对AUVR的实时监控和控制,包括机器人的运动轨迹、作业状态、环境感知数据等。
同时,随着5G、物联网等新一代通信技术的发展,AUVR的远程控制能力将得到进一步提升,有望实现更高带宽、更低延迟的远程控制。
海洋机器人在海洋环境评估中的智能化应用
海洋机器人在海洋环境评估中的智能化应用在人类探索海洋的进程中,海洋环境评估一直是至关重要的课题。
随着科技的迅猛发展,海洋机器人逐渐成为海洋环境评估的得力助手,以其智能化的应用为我们深入了解海洋环境提供了前所未有的可能。
海洋环境评估是一项复杂而艰巨的任务,涉及对海洋物理、化学、生物等多方面因素的监测和分析。
传统的评估方法往往受到人力、物力和技术手段的限制,难以实现全面、实时和高精度的监测。
而海洋机器人的出现,为解决这些问题带来了新的思路和方法。
海洋机器人具有多种类型,如自主水下航行器(AUV)、遥控水下航行器(ROV)以及水下滑翔机等。
这些机器人具备不同的特点和功能,能够适应各种复杂的海洋环境和任务需求。
自主水下航行器(AUV)是一种能够自主规划路径、执行任务的机器人。
它可以携带各种传感器,如温度传感器、盐度传感器、溶解氧传感器等,对海洋的物理参数进行长时间、大范围的监测。
例如,在监测海洋温度分布时,AUV 可以按照预设的航线,在不同深度和区域进行测量,获取大量的温度数据。
通过对这些数据的分析,我们能够了解海洋的热结构、海流运动等情况,从而为海洋环流模型的建立和气候变化研究提供重要依据。
遥控水下航行器(ROV)则通常由操作人员通过线缆进行远程控制。
ROV 配备了高清摄像机和机械手臂等设备,能够对海洋中的生物群落、海底地貌等进行直观的观察和采样。
在海洋生态环境评估中,ROV 可以帮助科学家近距离观察珊瑚礁的健康状况、鱼类的活动规律等。
同时,通过采集海底沉积物和水样,还可以分析其中的污染物含量和微生物群落结构,为评估海洋污染程度和生态系统的稳定性提供关键信息。
水下滑翔机是一种依靠自身浮力驱动的新型海洋机器人。
它的能耗低、续航能力强,能够在海洋中长时间工作。
水下滑翔机可以测量海洋的温盐深等基本参数,并且能够通过卫星通信将数据实时传输回陆地。
在海洋环境监测网络的构建中,水下滑翔机发挥着重要作用。
多个水下滑翔机协同工作,可以实现对大面积海域的持续监测,及时发现海洋环境的异常变化。
海洋机器人在灾害救援中的应用
海洋机器人在灾害救援中的应用在当今科技飞速发展的时代,海洋机器人正逐渐成为灾害救援领域的一支重要力量。
海洋占据了地球表面的大部分区域,当海洋灾害发生时,其带来的破坏和影响往往是巨大的。
而海洋机器人凭借其独特的优势,为灾害救援工作提供了新的思路和方法。
海洋灾害的种类繁多,如海啸、飓风、风暴潮、海冰等,这些灾害不仅会对沿海地区的基础设施和人民生命财产造成严重威胁,还可能引发一系列次生灾害。
在灾害发生后,及时获取准确的信息对于救援工作的开展至关重要。
传统的救援方式在面对广阔的海洋和复杂的环境时,往往存在诸多限制。
例如,救援人员难以迅速抵达受灾区域,恶劣的海况也会给救援行动带来巨大的风险。
而海洋机器人的出现,则为解决这些问题提供了可能。
海洋机器人具有多种类型,包括自主水下航行器(AUV)、遥控水下机器人(ROV)和水面无人艇(USV)等。
AUV 可以在无需人工干预的情况下,按照预设的路线进行自主探测和数据采集。
ROV 则通过线缆与母船相连,由操作人员在船上进行远程控制,能够完成更为复杂和精细的任务。
USV 则在水面上行动,可用于巡逻、监测和物资运输等工作。
在灾害救援中,海洋机器人可以发挥多种重要作用。
首先,它们能够快速到达受灾区域,进行环境监测和信息收集。
例如,在海啸发生后,海洋机器人可以迅速部署到灾区附近的海域,测量海浪高度、水流速度、水温等关键数据,为救援决策提供依据。
其次,海洋机器人可以用于搜寻失踪人员和遇难者。
它们配备有先进的传感器和摄像设备,能够在浑浊的海水中进行探测,提高搜寻的效率和准确性。
此外,海洋机器人还能够协助救援物资的运输和投放。
在一些交通受阻的受灾地区,海洋机器人可以携带急需的药品、食品和救援设备,突破海浪和障碍,将物资送达指定地点。
以一次飓风灾害为例,强风暴雨导致沿海地区遭受重创,道路中断,通信设施受损。
救援人员无法及时了解受灾区域的详细情况。
此时,派出了多台海洋机器人前往灾区。
小型模块化水下自主航行器技术概况
小型模块化水下自主航行器技术概况发布时间:2022-08-02T08:05:59.367Z 来源:《科学与技术》2022年3月6期作者:曹晓霖[导读] 水下自主航行器(AUV)逐渐向小型化和模块化方向发展,AUV系统的高度集成化、曹晓霖中国船舶集团有限公司第七一〇研究所湖北宜昌 443003摘要:水下自主航行器(AUV)逐渐向小型化和模块化方向发展,AUV系统的高度集成化、小型化可以有效较小AUV的操纵性和便携性。
针对AUV小型化和模块化设计问题进行了全面的剖析,首先对小型模块化AUV的国内外发展现状进行了分析,然后对小型模块化AUV 国内外的差距和关键技术进行了总结,最后对小型模块化AUV的应用前景进行了探讨。
关键词:模块化AUV;研究现状;关键技术;应用前景Technology Survey of Small Modular Autonomous Underwater VehicleCAO Xiaolin(No. 710 R&D Institute, CSSC, Yichang 443003, China)Abstract:Autonomous underwater vehicle (AUV) is developing towards miniaturization and modularization. The highly integration and miniaturization of AUV system can effectively reduce the maneuverability and portability of AUV. AUV miniaturization and modularization design problems are comprehensively analyzed. First of all, the development status of small modular AUV at home and abroad are analyzed. Then, the gap and key technologies of small modular AUV at home and abroad are summarized. Finally, application prospects of small modular AUV are discussed. Key words:modular AUV; development status; key technologies; application prospects引言:为满足深海海洋科学调查的需要,我国陆续开展了水下自主航行器技术的研究。
自主水下航行器导航与定位技术

自主水下航行器导航与定位技术发布时间:2023-02-03T02:36:04.888Z 来源:《科学与技术》2022年第18期作者:杜晓海[导读] 自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,杜晓海海军装备部 710065摘要:自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,在执行任务时需要准确的定位信息。
现有AUV主要采用基于捷联惯性导航系统(SINS),辅以声学导航和地球物理场匹配导航技术。
本文简要介绍了水下导航模式的基本原理、优缺点和适用场景;讨论了各种导航模式中的关键技术,以提高组合导航的精度和稳定性。
通过分析现阶段存在的问题,展望了水下航行的未来发展趋势。
关键词:自主水下航行器;智能导航;智能定位本文综述了目前主流的AUV水下导航关键技术,包括DVL测速技术、LBL/SBL/USBL水声定位导航技术、地形辅助导航技术、地磁辅助导航技术和重力辅助导航技术以及协同导航技术,介绍了相关导航技术的基本原理和发展,分析和总结了水下自主导航中各技术的关键问题和技术难点,最后展望了AUV水下导航技术的未来发展。
1 SINS/DVL定位技术DVL是一种利用声波多普勒效应测量载流子速度的导航仪器。
根据AUV与水底之间的相对距离,DVL有两种模式:水底跟踪和水底跟踪。
当载流子与水底的相对距离在该范围内时,声波可以到达水底,当AUV与水底之间的相对距离超过范围时,声波无法到达水底,DVL采用水跟踪模式。
根据传输波速的多少,可以分为单波束、双波束和四波束。
1.1 SINS/DVL对准技术惯性导航可以为AUV提供实时的姿态、速度、位置等导航信息。
然而,初始对准必须在使用前进行,初始对准的结果在很大程度上决定了最终的集成精度。
通常,AUV在停泊或航行于水面时接收GPS信号进行初始对准。
在特定的任务背景下,AUV需要在水下运动期间完成初始对准,因此,许多学者提出了基于DVL辅助的移动基站对准。
水下机器人在海洋资源勘探中的新技术应用
水下机器人在海洋资源勘探中的新技术应用海洋,覆盖了地球表面的约 70%,蕴含着丰富的资源,如石油、天然气、矿产、生物资源等。
然而,海洋环境复杂、恶劣,对人类的直接勘探和开发带来了巨大的挑战。
水下机器人的出现和不断发展,为海洋资源勘探带来了新的希望和可能。
它们凭借先进的技术,能够深入海洋深处,获取宝贵的数据和信息,为资源的开发和利用提供了重要的支持。
水下机器人,也被称为无人遥控潜水器(ROV)或自主式水下航行器(AUV),是一种能够在水下自主或遥控操作的智能化设备。
在海洋资源勘探中,水下机器人发挥着越来越重要的作用,其新技术的应用也在不断拓展和深化。
在传感器技术方面,水下机器人配备了一系列高精度、高灵敏度的传感器。
例如,多波束测深仪能够快速、准确地测量海底地形,绘制出详细的海底地貌图;侧扫声纳可以探测海底的地质结构和物体分布;磁力仪则用于测量海底磁场,帮助寻找磁性矿产资源。
这些传感器的性能不断提升,数据精度和分辨率越来越高,为海洋资源勘探提供了更加准确和丰富的信息。
视觉技术的应用也是水下机器人的一大亮点。
高清摄像机和先进的图像处理技术,使得水下机器人能够拍摄清晰的海底图像和视频。
通过计算机视觉算法,对这些图像和视频进行分析和处理,可以识别出海底的矿产露头、生物群落、沉船等目标。
同时,水下机器人还可以利用激光扫描技术,构建三维海底模型,更加直观地展示海底的形态和特征。
在动力与推进技术方面,新型的能源系统和高效的推进器使得水下机器人的续航能力和作业范围大大增加。
例如,采用锂电池或燃料电池作为能源,能够提供更长时间的动力支持;而无刷直流电机和喷水推进器等先进的推进技术,则提高了水下机器人的运动性能和操控性。
此外,一些水下机器人还具备自主充电和能源管理功能,能够在作业过程中根据能源状况自动调整工作模式,提高能源利用效率。
通信技术的进步也为水下机器人的应用带来了便利。
传统的水下通信方式存在着数据传输速率低、距离有限等问题。
浅谈深海水下自主式无缆潜航器的发展及应用

图1 Bluefin-21图2 Autosub 6000图3 EXPLORE图4 REMUS 6000 图5 A6K图6 Sea Raptor65 /水转向深水。
深海水下矿产资源如多金属结核、富钴结壳、多金属硫化物、富稀土沉积物等多分布在数千米水深的海底区域,天然气水合物也多分布在几百至几千米的区域。
深海水下资源的勘探对社会的发展具有重要的意义,而深海AUV必将在水下资源勘探过程中发挥重要作用。
2.2 深海水下搜救深海水下搜救是深海AUV的一个重要应用方向,早在 1963 年就有美国“阿尔文”号与“科夫”号无人潜水器协作搜寻、打捞出西班牙海沟失落氢弹的成功案例。
在马航MH370及法航447的水下搜寻中深海AUV发挥关键作用。
荷兰辉固公司曾使用英国Kongsberg公司的HUGIN AUV用于马航MH370水下搜寻;美国军方也曾使用BluefinRobotics的Bluefin-21 AUV搜寻马航失联客机;英国Kongsberg公司生产的REMUS AUV曾成功搜寻到法航447的发动机残骸。
深水AUV因其作业可靠,智能程度高成为了深海水下搜救的首选工具。
2.3 水下地形测绘目前水下地形的测绘主要依靠多波束测深系统,在应对水深较浅的水下地形勘测任务中,船载多波束测深系统均可获得分辨率较高的水下地形图。
但在深水区域,受到水深影响,即使是开角较小的深水多波束在深水情况下会由于传播距离的增加导致其分辨率相对较差,无法获得高精度的水下地形图。
深海AUV可在距离海底较近的高度进行作业,因此其可获得高精度的深海水下地形图像。
3.深海AUV的未来的发展方向3.1 远程化深海AUV在水下作业过程中其主要动力来源是所搭载的电池模块,依据其搭载的探测装置及工作状态不同,其在水下的工作时间也存在较大差别。
多数深海AUV的水下续航时间均可达到24h,但随着电池技术的不断发展,深海AUV的续航力将得到持续提升。
续航力的提升,可使AUV在单次布放后获得更为庞大的水下数据从而提升深海AUV的水下作业效率。