基于三边测量法的移动锚节点定位方案
基站三角定位法
基站三角定位法
基站三角定位法是一种常用的定位技术,它通过测量移动终端与多个基站之间的信号传播时间或信号强度,计算出移动终端的位置。
具体来说,它需要在移动终端和多个基站之间建立信号连接,然后通过测量信号的传播时间或信号强度来计算移动终端与基站之间的距离。
最后,通过三角几何运算,可以计算出移动终端的具体位置。
该方法在城市、郊区和山区等不同地形条件下均具有较高的定位精度和可靠性,因此在移动通信、智能交通、智慧城市等领域得到了广泛应用。
同时,该方法还可以结合其他定位技术,如卫星定位、惯性导航等,实现更高精度的定位。
三点定位原理

三点定位原理三点定位原理是一种在导航和定位领域广泛应用的定位技术。
它通过测量接收器与至少三个卫星之间的距离来确定接收器的位置,从而实现精准定位。
这种原理已经被广泛应用于GPS导航、地图定位、无人机导航等领域。
下面将详细介绍三点定位原理的工作原理、应用场景和未来发展方向。
三点定位原理的工作原理是基于三角测量原理的。
当接收器与至少三颗卫星之间的距离确定后,就可以得出接收器所在的位置。
这是因为,三个点确定一个平面,因此通过三个卫星的距离可以确定接收器所在的平面位置。
而接收器与卫星的距离可以通过卫星发射的信号与接收器接收的信号之间的时间差来计算。
通过精确测量这些时间差,就可以确定接收器的位置。
这种原理在实际应用中被广泛使用,因为它可以实现高精度的定位。
三点定位原理在现代导航和定位技术中有着广泛的应用。
其中最典型的应用就是GPS导航系统。
通过接收卫星发射的信号,GPS接收器可以计算出自己的位置,并在地图上显示出来。
这种技术已经被广泛应用于汽车导航、航空导航、船舶导航等领域。
此外,三点定位原理还被应用于地图定位、无人机导航等领域。
可以说,三点定位原理已经成为现代导航和定位技术的基础。
未来,随着技术的不断发展,三点定位原理也将得到进一步的完善和应用。
例如,通过增加卫星数量和改进信号处理算法,可以提高定位的精度和稳定性。
另外,结合人工智能和大数据技术,可以实现更加智能化的定位系统,为用户提供更加个性化的定位服务。
同时,三点定位原理还可以应用于更多的领域,如智能交通、智能城市等,为人们的生活带来更多的便利。
总的来说,三点定位原理是一种在导航和定位领域广泛应用的定位技术,它通过测量接收器与至少三个卫星之间的距离来确定接收器的位置。
这种原理已经被广泛应用于GPS导航、地图定位、无人机导航等领域,并且在未来有着更广阔的发展空间。
相信随着技术的不断进步,三点定位原理将会为人们的生活带来更多的便利和惊喜。
三边定位法计算过程

三边定位法计算过程
三边定位法,又称距离角定位法或三边测量法,是一种非常常见的测量方法,它主要利用三条已知长度的边和它们之间的角度来确定一个点的位置。
三边定位法计算过程如下:
第一步:进行测量
首先,需要在地面上挑选三个相对固定的点作为基准点,然后测量它们之间的距离,并记录下来。
这个过程一般使用测量工具,如测距仪、经纬仪、全站仪等设备,可以获得高精度的测量结果。
第二步:计算角度
在测量好三条边的长度之后,接下来需要测量它们之间的角度。
这个过程有多种方法,如使用经纬仪、全站仪、测角仪等工具,也可以通过手动测量来获得角度值。
具体的计算公式如下:
角度 = 弧度* 180 / π
其中,弧度值可以通过计算两边之间的比例来获得。
第三步:计算坐标
在获得三个点的距离和角度值之后,就可以开始计算需要的坐标位置。
不同的计算方法会有不同的公式,但它
们的本质都是基于三角函数来进行计算的。
以下是一个常用的计算公式:
cosC = (a^2 + b^2 - c^2) / 2ab
sinC = √(1 - cos^2C)
其中,a、b、c分别表示三边长度,C表示夹角,使用这个公式可以获得坐标位置。
第四步:检查精度
在计算完坐标位置之后,需要对结果进行校验,确保其精度符合要求。
这个过程一般需要对测量数据进行再次比对,并对计算方法进行反复检查,确保数据的准确性。
总体而言,三边定位法是一种非常常见、精度较高的测量方法。
其计算过程虽然相对繁琐,但只要按照规定的步骤进行操作,并严格控制测量的误差,就可以得到高质量的测量结果。
一种基于移动锚节点的静态无线传感器网络定位算法构建和分析

动锚节点就是具 备移动能力并且配 置 自身定位设备的节点 。 在 数据包 , 以及信标数据包 中的发射该信标 的信标点位置的信息 无线传感器 网络的使 用中具体 的分布 在无线传 感器网络 中的位 就能详细 的确 定, 在移动锚节点中通信 的传感 器节点可 以接 收 置节点中, 来提 供可靠的辅助信息 , 并且按照一定的算法 来计算 到信 标数据 包 , 在 测量 的同时根 据节点间的连 同信 息或者是3 自身的估计位 置。 个 以上 的测量距 离来估 计 自身的位 置。 本文在结合使用R S S I 、
无线 天地 ・
种基于移动锚节点的静态 无线传感器网络定位算法构建和分析
一
黄衍玺( 南京 航空航天大学, 江苏 南京 2 1 0 0 1 6 )
摘 要: 随着网络技术在深入的发展 , 静态无线传感器网络主要是通过引入网络技术中具有数据采集能力、 信息处理能力以及无线通信的能
力 的传感 器节点进行 相 互交换 信息 , 并且协调控 制有机相 结合。 该技 术 的已经被 广泛的应用于生活中的各 个领 域中, 在 移动锚 节I 量 的使 用中, 改 变了 静 态无线传感 器网络在 发 展中遇 到了环境 恶劣、 不可到达 区域最 终 实现了 监 测和跟 踪的任务 , 有效 的控 制了节点位 置的具 体信息。
关键词: 移动锚节点; 静态无线传感器; 网络定位; 算法构建
在静态无线传感 器网络定位 的使用中, 将信息进行交通信量 , 避免了在测量 中的误 差影
但是无需测距定位 , 在使用 中能够减 小节点的尺寸, 满足了 有 效 的控制 了有 机体的结合, 最终实现 了物与物 的互联 , 将感 响。
1 . 2静态无线传感器网络定位算法分类
静态无 线传 感 器 网络定位 的算法 主要 有 :( 1 )基于测 距
三边测量定位算法c语言
三边测量定位算法c语言三边测量定位算法是一种基于距离的定位算法,通过已知三个点的坐标和与这三个点之间的距离,可以求解未知点的坐标。
下面是一个简单的三边测量定位算法的C语言实现:```cinclude <>include <>// 已知三个点的坐标和与这三个点之间的距离double x1 = 0, y1 = 0, x2 = 1, y2 = 1, x3 = 2, y3 = 2;double d1 = sqrt(2), d2 = sqrt(2), d3 = sqrt(2);// 求解未知点的坐标void solve() {double a = pow(x2 - x1, 2) + pow(y2 - y1, 2); // 边1的长度平方double b = pow(x3 - x2, 2) + pow(y3 - y2, 2); // 边2的长度平方double c = pow(x1 - x3, 2) + pow(y1 - y3, 2); // 边3的长度平方double D = 2 (x1 (y2 - y3) + x2 (y3 - y1) + x3 (y1 - y2)); // 三边长度乘积之和double delta = pow(D, 2) - 4 (a b + b c + c a); // 判别式if (delta > 0) { // 有两个解double x1 = (-b + sqrt(delta)) / (2 a); // 一个解的x坐标double y1 = (a y1 - b x1 + D) / (2 a); // 一个解的y坐标printf("The coordinates of the unknown point are (%f, %f)\n", x1, y1);double x2 = (-b - sqrt(delta)) / (2 a); // 另一个解的x坐标double y2 = (a y1 - b x1 - D) / (2 a); // 另一个解的y坐标printf("The coordinates of the unknown point are (%f, %f)\n", x2, y2);} else if (delta == 0) { // 一个解double x = -b / (2 a); // 解的x坐标double y = (a y1 - b x + D) / (2 a); // 解的y坐标printf("The coordinates of the unknown point are (%f, %f)\n", x, y);} else { // 无解printf("No solution exists.\n");}}int main() {solve();return 0;}```在这个实现中,我们首先定义了三个已知点的坐标和与这三个点之间的距离。
dvhop三边测量法MATLAB,基于非测距的DV-Hop定位算法改进

dvhop三边测量法MATLAB,基于⾮测距的DV-Hop定位算法改进⽆线传感器⽹络是由⼤量随机分布的传感器节点组成,是⼀种分布式的、⾃组织的⽹络。
其关键技术包括:⽹络拓扑控制、节点定位、时钟同步、数据融合、路由协议等。
⽽节点定位问题则是⽆线传感器⽹络中的⼀个最为基本和重要的问题。
⽬前,⽆线传感器⽹络定位算法可以分为基于测距和基于⾮测距的定位算法。
基于测距定位常⽤的测量⽅法有TOA、TDOA、AOA、RSSI,尽管这些技术相对精度⾼,但是对硬件要求很⾼。
基于⾮测距定位常⽤的测量⽅法有:DV- Hop、质⼼、APIT、MDSMAP。
DV-Hop为典型的基于⾮测距定位,其对硬件要求低,实现简单。
它的不⾜之处在于计算平均跳距及定位坐标时会产⽣误差。
因此针对DV-Hop算法的缺陷,提出了⼀系列的改进算法,包括:对原始算法中的平均跳距进⾏改进,使⽤多个锚节点估算平均距离并且采⽤归⼀化加权的平均跳距;提出基于⼏何学的定位算法,利⽤⼏何学中的斜率⽅法来判断锚节点间的位置关系,从中选取最优的锚节点序列,从⽽更精确地确定未知节点;引⼊共线度的概念,利⽤共线度参数,动态地调节未知节点可以收集的邻居锚节点的距离阈值,挑选⽹络中好的锚节点组进⾏位置估计,最后再⽤加权估计机制来得到最终的节点位置估计。
这些⽅法都在⼀定程度上提⾼了定位精度。
本⽂针对DV-Hop算法中计算平均跳距和三边定位两⽅⾯存在的定位误差,提出了改进的算法。
⾸先利⽤全⽹平均跳距来纠正单个锚节点的平均跳距,然后在最后计算三边定位时,利⽤节点间连通度的不同,选择最优组合的3个锚节点来参与定位,进⼀步提⾼定位精度。
1 DV-Hop算法介绍美国路特葛斯⼤学的Dragos Niculescu等⼈利⽤距离⽮量路由和GPS定位原理提出⼀系列分布式定位算法,合称APS,DV-Hop算法就是其中的⼀种。
DVHop分为3个步骤实现:① 锚节点i⼴播⾃⾝的位置信息IDi。
初始跳数0,每发送⼀个节点信息,跳数就加1,然后转发,直到⽹络中所有的节点都收到锚节点的信息包。
Trilateration三边测量定位算法
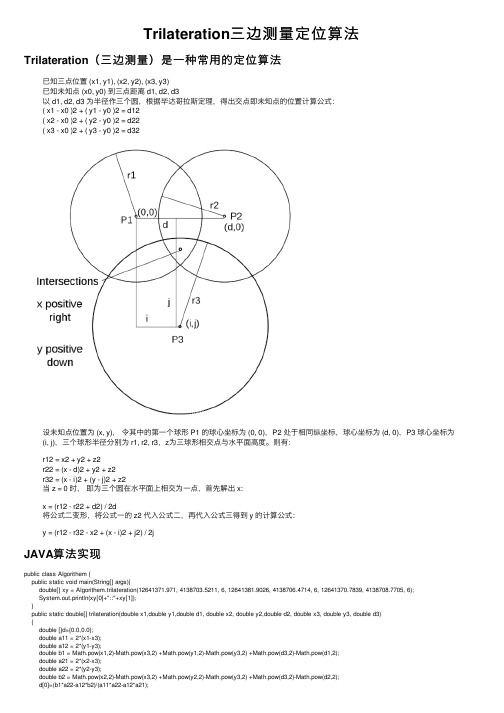
Trilateration三边测量定位算法Trilateration(三边测量)是⼀种常⽤的定位算法已知三点位置 (x1, y1), (x2, y2), (x3, y3)已知未知点 (x0, y0) 到三点距离 d1, d2, d3以 d1, d2, d3 为半径作三个圆,根据毕达哥拉斯定理,得出交点即未知点的位置计算公式:( x1 - x0 )2 + ( y1 - y0 )2 = d12( x2 - x0 )2 + ( y2 - y0 )2 = d22( x3 - x0 )2 + ( y3 - y0 )2 = d32设未知点位置为 (x, y),令其中的第⼀个球形 P1 的球⼼坐标为 (0, 0),P2 处于相同纵坐标,球⼼坐标为 (d, 0),P3 球⼼坐标为(i, j),三个球形半径分别为 r1, r2, r3,z为三球形相交点与⽔平⾯⾼度。
则有:r12 = x2 + y2 + z2r22 = (x - d)2 + y2 + z2r32 = (x - i)2 + (y - j)2 + z2当 z = 0 时,即为三个圆在⽔平⾯上相交为⼀点,⾸先解出 x:x = (r12 - r22 + d2) / 2d将公式⼆变形,将公式⼀的 z2 代⼊公式⼆,再代⼊公式三得到 y 的计算公式:y = (r12 - r32 - x2 + (x - i)2 + j2) / 2jJAVA算法实现public class Algorithem {public static void main(String[] args){double[] xy = Algorithem.trilateration(12641371.971, 4138703.5211, 6, 12641381.9026, 4138706.4714, 6, 12641370.7839, 4138708.7705, 6);System.out.println(xy[0]+"::"+xy[1]);}public static double[] trilateration(double x1,double y1,double d1, double x2, double y2,double d2, double x3, double y3, double d3){double []d={0.0,0.0};double a11 = 2*(x1-x3);double a12 = 2*(y1-y3);double b1 = Math.pow(x1,2)-Math.pow(x3,2) +Math.pow(y1,2)-Math.pow(y3,2) +Math.pow(d3,2)-Math.pow(d1,2);double a21 = 2*(x2-x3);double a22 = 2*(y2-y3);double b2 = Math.pow(x2,2)-Math.pow(x3,2) +Math.pow(y2,2)-Math.pow(y3,2) +Math.pow(d3,2)-Math.pow(d2,2);d[0]=(b1*a22-a12*b2)/(a11*a22-a12*a21);d[1]=(a11*b2-b1*a21)/(a11*a22-a12*a21);return d;}}D3.js实现定义三个圆的坐标及半径,计算出交点的坐标 (obj_x, obj_y).var x_0 = 150, y_0 = 150;var x_1 = x_0, y_1 = y_0, d = 150, x_2 = x_0 + d, x_3 = 225, y_3 = 315, r = 100;var i = x_3 - x_0, j = y_3 - y_0;var x = (Math.pow(r, 2) - Math.pow(r, 2) + Math.pow(d, 2)) / (2 * d) + x_0;var obj_x = x + x_0;var y = (Math.pow(r, 2) - Math.pow(r, 2) - Math.pow(x, 2) + Math.pow((x - i), 2)+ Math.pow(j, 2)) / (2 * j);var obj_y = y + y_0;绘出圆形及交点:svg.append("circle").attr("cx", x_1).attr("cy", y_1).attr("r", r).style("fill", "blue").style("opacity", 0.3);svg.append("circle").attr("cx", x_2).attr("cy", y_0).attr("r", r).style("fill", "red").style("opacity", 0.4);svg.append("circle").attr("cx", x_3).attr("cy", y_3).style("opacity", 0.5).attr("r", r).style("fill", "yellow");svg.append("circle").attr("cx", obj_x).attr("cy", obj_y).attr("r", 3).style("fill", "red");多于⽤实现定位算法,与之相同的也许还可以采⽤K-Means或Overlap聚类算法,后两者在地图标注上使⽤⽐较⼴。
基于一个移动锚节点的无线传感器网络节点定位算法

基于一个移动锚节点的无线传感器网络节点定位算法
胡炜薇;胡冀;应智花
【期刊名称】《系统仿真学报》
【年(卷),期】2010()4
【摘要】节点定位技术是无线传感器网络应用的重要支撑技术之一,对此提出了一种基于移动锚节点的两步定位算法。
该算法利用一个移动锚节点遍历整个网络,并周期性的广播包含自身当前位置的信息。
把传感器节点的自身定位过程用基于无迹状态滤波(UKF)的目标跟踪方法实现。
由于所用的目标状态模型和量测模型有一定的不确定性,所以先选取不共线3个锚节点信息,利用三边定位法提高滤波的初始位置精度,从而改善定位效果。
最后仿真并分析比较了锚节点在多种移动轨迹情况下节点定位误差,结果表明本文所述两步定位法改善了对锚节点移动轨迹的特殊要求的限制,更适合实际情况,并取得理想的定位精度。
【总页数】5页(P978-982)
【作者】胡炜薇;胡冀;应智花
【作者单位】杭州电子科技大学电子信息学院
【正文语种】中文
【中图分类】TP393
【相关文献】
1.一种基于移动锚节点的静态无线传感器网络定位算法构建和分析
2.无线传感器网络中基于移动锚节点的APIT的改进定位算法
3.基于虚拟力的单个移动锚节点无线
传感器网络定位算法4.基于移动锚节点无线传感器网络定位的算法5.基于移动锚节点的无线传感器网络节点定位算法
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定位覆盖率、定位精度以及移动锚节点的能耗有很
大影响。一般认为,最优的锚节点移动路径需要满
足两个条件,一是能够提供良好的网络覆盖范围,确
保区域内所有节点都至少三个非共线
的有效信号。
典型 的 移 动 锚 节 点 路 径 规 划 主 要 分 为 两 类[8 - 10],一类是随机移动模型,如随机游走模型、高
0 引言
无线传感器网络是一种多跳的自组织网络系 统,它由大量的微型传感器节点组成,节点之间通过 无线的方 式 进 行 通 信[1]。 随 着 人 工 成 本 的 不 断 上 升,生产领域对提高设备自动化水平的需求日益迫 切。在数据采集与处理方面,无线传感器网络具有 比较明显的优势,因此引起了学术界、产业界和各国 政府的普遍关注。目前,无线传感器网络已经与经 济社会发展的各个方面深度融合,在气象监测、抢险 救灾、目标跟踪等领域发挥不可替代的作用[2]。作 为上述应用的重要支撑环节,无线传感器网络节点 定位技术一直是研究的热点。根据定位过程是否需 要测距,节点定位可以分为基于测距的方法和无需 测距的方法[3 - 4]; 根据锚节点是否移动,可以分为静 态锚节点定位和动态锚节点定位[5 - 6]。静态锚节点
斯 - 马尔科夫模型等; 另一类是非随机移动模型,包
括以 SCAN 型、DOUBLE SCAN 型以及 HILBERT 型
为代表的经典移动模型。其中,SCAN 型路径是最
简单、最容易实现的一种轨迹。
如图 1 所示,在 SCAN 型路径中,移动锚节点沿
着一个维度遍历监测区域,两条连续的平行轨迹之
间的距离定义为移动路径间隔 S( 或轨迹分辨率) 。
问题。锚节点的移动路径往往对网络中未知节点的
收稿日期: 2018 - 10 - 21 基金项目: 江苏省高等学校自然科学研究面上项目 ( 18KJD14000-
2) ; 江苏 警 官 学 院 高 层 次 人 才 引 进 项 目 ( JSPI17GKZL201) ; 江苏警官学院科研创新团队( 2018SJYTD15 ) ; 江 苏 警 官 学 院 院 级 项 目 ( 2017SJYZY01,2017SJYZY02, 2017SJYZC05) 作者简介: 刘琛( 1990 - ) ,男,博士,讲师,研究方向为物联网技术。
Mobile anchor node localization scheme based on the trilateral measurement
LIU Chen,NI Xue-li
( Department of Computer Information and Cyber Security,Jiangsu Police Institute,Nanjing 210031,China)
Abstract: Determining the location of nodes is the primary issue for wireless sensor networks in sensing, collecting and processing related information in the monitoring area,which directly affects its application in practice. The basic concept of wireless sensor networks,the calculation method of node location and the typical path planning of mobile anchor nodes are introduced and a mobile anchor node localization scheme based on trilateral measurement is proposed. With all unknown nodes covered,the path planning of this scheme is relatively simple and can reach high accuracy. Key words: wireless sensor network; mobile anchor node; trilateral measurement; SCAN path; node localization scheme
假设传感器节点的通信半径为 R,若保证监测区域
内的所有节点都能接收到移动锚节点的信号,则移
动路径间隔 S 需要满足,当 S = 2R 时,移动锚节点
的路径长度 d 可以表示为[11]:
( ) d =
具有较好的定位效果,但对节点的部署密度要求较 高,常常面 临 成 本 高、部 署 难 等 问 题[7]。 基 于 动 态 锚节点的定位技术利用锚节点可以灵活移动的特 性,可以降低节点部署成本,改善网络结构,具有显 著的研究意义与实用价值。
1 移动锚节点定位技术
1. 1 移动锚节点的路径规划 路径规划是移动锚节点定位过程中的一个重要
文章编号: 1009 - 2552( 2019) 03 - 0029 - 04 DOI: 10. 13274 / j. cnki. hdzj. 2019. 03. 007
基于三边测量法的移动锚节点定位方案
刘 琛,倪雪莉
( 江苏警官学院计算机信息与网络安全系,南京 210031)
摘 要: 确定节点的位置是无线传感器网络对监测区域相关信息进行感知、采集和处理所面临 的首要问题,直接影响它在实际中的应用。文中介绍了无线传感器网络的基本概念、节点位置 的计算方法以及典型的移动锚节点路径规划,提出一种基于三边测量法的移动锚节点定位方案。 在保证遍历所有未知节点的前提下,该方案的路径规划较为简单,定位精度较高。 关键词: 无线传感器网络; 移动锚节点; 三边测量法; SCAN 路径; 节点定位 中图分类号: TP393 文献标识码: A