高空作业平台升降机构设计与仿真
基于UG的升降机构的建模及运动仿真

基于UG的升降机构的建模及运动仿真升降机是工业自动化生产中非常重要的机构,广泛应用于各种机械设备的升降装置。
在升降机的构造中,升降机构是起到关键作用的部分之一。
本文将基于UG软件对升降机构进行建模和运动仿真。
首先,在UG软件中绘制出升降机构的三维模型。
升降机构主要由支架、升降柱、伸缩杆、导轨、保护套等零件组成。
在绘图过程中,需要根据具体的工程要求进行尺寸和配比的设计。
其次,根据升降机的工作原理和运动规律,建立升降机构的动力学模型,并对其进行运动仿真。
升降机的运动状态可以分为升降、下降、伸出和收回四种类型。
在每种状态下,升降机的运动规律都是不同的,需要针对性地进行建模和仿真。
在进行运动仿真时,需要当前升降机状态的初始参数,例如各个零部件的初始位置、速度、加速度等,同时还需要给定的系统参数,例如负载重量、电动机的功率等。
调整这些参数可以让仿真结果更加贴近实际。
最后,通过实际测量和仿真结果的对比,对升降机构进行优化改进。
对不合理的部分进行修正和调整,使其在升降、下降、伸出和收回等不同工况下均能保持良好的性能和稳定性,从而保证升降机的正常运转和安全性。
综上所述,通过UG软件对升降机构进行建模和运动仿真,可以充分了解升降机的结构和运动规律,有助于发现潜在的问题并加以优化改进,提高升降机的精度和有效性,提高生产效率和安全性,从而更好地满足工业自动化生产的需求。
数据分析是一个非常有效的方法,可以用来研究各种信息。
无论是个人还是公司,皆可以从数据分析中受益。
这里,我们将列出一些数据,并进行分析,以展示数据分析的价值和实际意义。
以一个假设的数据集为例:一家服装公司在过去三个月内销售了1000件女装,其中450件为裙子,300件为上衣,250件为外套。
以下是对该数据集的分析结果:1.销售额分析这家服装公司在过去三个月总共获得了销售额1500万美元。
从销售额来看,裙子销售额为675万美元,上衣销售额为450万美元,外套销售额为375万美元。
四连杆升降机构的仿真与结构优化

四连杆升降机构的仿真与结构优化贺平平【摘要】Through the four connecting rod lifting mechanism modeling, use the method of motion simulation, it is concluded that the maximum tension rod for 38049 kg;Further through the finite element method to bar stress and strain of the four rod lifting mechanism is simulated;In finite element based on the results of simulation and structure optimization, the optimized rod performance is more reasonable, the maximum Von Mises reduced from 300.7 MPa to 300.7 MPa, the overall quality and to reduce the 18.65 kg, lower by 33%, but also for other parts of four rod lifting mechanism design provides a feasible method for reference.%通过对四连杆升降机构进行建模,用运动仿真的方法,得出拉杆的最大拉力为38049kg;进一步通过有限元方法对四杆升降机构中的拉杆应力、应变进行了模拟;在有限元仿真结果的基础上进行了结构优化,优化后的拉杆性能更加趋于合理,最大Von Mises由300.7MPa降低到259.5MPa,整体质量也减轻了18.65kg,降低幅度达33%,同时也为四杆升降机构的其他零部件设计提供了切实可行的借鉴方法。
中望三维软件环境下SWL丝杆升降机的结构设计及运动仿真
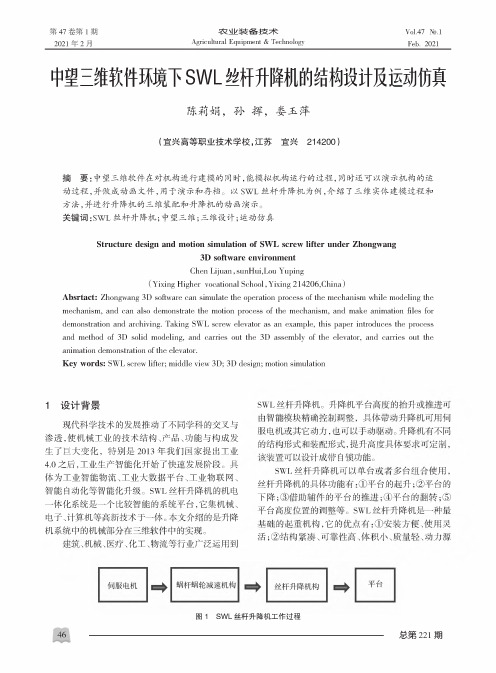
第47卷第1期2021年2月农业装备技术Agricultural Equipment&TechnologyVol.477.1Feb.2021中"三维%件'境下SWL丝杆升降机的结构234567真陈莉娟,孙挥,娄玉萍(宜兴高等职业技术学校,江苏宜兴214200)摘要:中望三维软件在对机构进行建模的同时,能模拟机构运行的过程,同时还可以演示机构的运动过程,并做成动画文件,用于演示和存档。
以SWL丝杆升降机为例,介绍了三维实体建模过程和方法,并进行升降机的三维装配和升降机的动画演示V关键词:SWL丝杆升降机;中望三维;三维设计;运动仿真Structure design and motion simulation of SWL screw lifter under Zhongwang3D software environmentChen Lijuan,sunHui,Lou Yuping(Yixing Higher vocational School,Yixing214206=Chin:)Absrtact:Zhongwang3D software can simulate the operation process of the mechanism while modeling the mechanism,and can also demonstrate the motion process of the mechanism,and make animation files for demonstration and archiving.Taking SWL screw elevator as an example,this paper introduces the process and method of3D solid modeling,and carries out the3D assembly of the elevator,and carries out the animation demonstration of the elevator.Key words:SWL screw lifter;middle view3D;3D design;motion simulation1设计背景现代科学技术的发展推动了不同学科的交叉与渗透,使机械工业的技术结构、产品、功能与构成发生了巨大变化,特别是2013年我们国家提岀工业4.0之后,工业生产智能化开始了快速发展阶段。
新型升降平台的运动仿真和有限元分析

2016年 4月
新型升 降平台的运 动仿真和有 限元分析
李 乐毅
(四川建筑职业技术学 院 机 械工 程系 ,四川 德 阳 618000) 摘 要 :宽厚板压平机通常选用 四连杆平 面升降机构作为其升降平台 ,不仅平 台的本体笨 重 ,而且升降时十分容易 出 现倾斜事故 。所 以根据依托 项 目,参 照主要运 用于轻载的剪叉式升降平台 ,并考 虑到重载时的特点 ,进而研发 出了能应用 于大型宽厚板压平机 的新型剪叉式升 降平 台 ,并对其进行 了运动仿真和有 限元分析 。 关键词 :升降平台 ;运动仿真 ;有限元 中图分类号 :TF341.9 文献标识码 :A 文章编号 :1672—4801(2016)02—066—04
certainties[J].International Journal ofRobust and Nonlinear Contro1.2006,16(10):485—503. [6】骆德渊 ,刘荣 ,李纪文 .采用模糊逻辑 的移动机器人轨迹跟踪[J].电子科技大学学报 ,2008,37(6):943—946. [7】袁安富 ,沈思思 ,余莉 ,等 .基于 ADAMs和 MATLAB的喷涂机器人运 动仿真研究 [J】.组合机床 与 自动化加 工技术 ,2014
参 考 文 献 : 【1】郝 铁文 .宽厚板压平机技术发展与进步lJ1.一重技术 ,201 1(5):17—20. 【2】胡正寰 ,夏巨谌 .金属 塑性成形手册上[M】.北京 :化学工业 出版社 ,2009. 【3】乞英焕 ,董为 民,孙健 ,等 .对称驱动剪叉液压升降平 台的动力学 『J1.新技术新工艺 ,2013(5):40—41 [4]陈定方 ,罗亚波 .虚拟设计[M].北 京 :机械工业版社 ,2007. 【5】李增刚 .ADAMSA I']详解与实例【M】.北京 :国防工业 出版社 ,2006. [6】孙光旭 ,袁端才 .液压剪叉式升降 台的动力学仿真[J】.系统仿真学报 ,2010(1 1):2650—2653. 【7】哈尔滨工业大学机械原理教研室 .机械原 理【M】.北京 :高等教育 出版社 ,2000:l1—16. 【8】陈立周 .机械 优化设计 方法 [M】.第 2版 .北京 :冶金工业 出版社 ,2005.
四连杆升降机构的仿真与结构优化

( S a n m e n x i a P o l y t e c h n i x , S a n m e n x i a 4 7 2 0 0 0 , C h i n a )
A b s t r a c t: T h r o u g h t h e f o u r c o n n e c t i n g r o d l i f t i n g me c h a n i s m mo d e l i n g , u s e t h e me t h o d o f mo t i o n s i mu l a t i o n , i t i s c o n c l u d e d t h a t t h e ma x i mu m t e n s i o n r o d f o r 3 8 0 4 9 k g ; F u a h e r t h r o u g h t h e i f n i t e e l e me n t me t h o d t o b a r s t r e s s n d a s t r a i n o f t h e f o u r r o d l i f t i n g me c h a n i s m i s s i mu l a t e d ; I n i f n i t e e l e me n t b a s e d o n t h e r e s u l t s o f s i mu l a t i o n a n d s t r u c t u r e o p t i mi z a t i o n , t h e o p t i mi z e d r o d p e r f o r ma n c e i s mo r e r e a s o n a b l e , t h e ma x i mu m Vo n Mi s e s r e d u c e d f r o m
高空作业机器人控制系统设计与仿真

高空作业机器人控制系统设计与仿真随着科技的不断进步和发展,高空作业机器人在现代工业生产中起着越来越重要的作用。
控制系统是高空作业机器人不可或缺的组成部分,它负责指导和控制机器人执行各种高空作业任务。
本文将介绍高空作业机器人控制系统的设计原则、主要组成和仿真方法。
一、高空作业机器人控制系统设计原则1. 安全性:高空作业机器人工作环境复杂多变,存在一定的风险和安全隐患。
因此,控制系统设计应注重安全性,确保机器人能够在高空稳定运行,并避免事故发生。
2. 精确性:高空作业涉及到精细的操作,控制系统需具备高精确度,能够准确控制机器人执行各项任务。
3. 灵活性:由于高空作业任务的多样性,控制系统需具备一定的灵活性,能够适应不同目标和场景的需求。
4. 可靠性:高空作业机器人一旦发生故障可能带来严重后果,因此,控制系统设计应具备高可靠性,保证机器人能够持续稳定运行。
二、高空作业机器人控制系统主要组成1. 感知模块:感知模块是控制系统的基础,它通过传感器获取环境信息,如高度、距离、姿态等。
根据所需任务,常用的传感器包括激光雷达、摄像头、惯性测量单元等。
2. 规划与决策模块:规划与决策模块根据感知模块提供的环境信息,制定机器人行动路线和工作策略。
常用的算法包括路径规划、避障算法、决策树等。
3. 控制模块:控制模块根据规划与决策模块生成的指令,控制机器人执行相应的动作。
常见的控制方式包括PID控制、模糊控制、自适应控制等。
4. 通讯模块:通讯模块用于实现控制系统与高空作业机器人的通信,传输指令和接收反馈信息。
常用的通讯方式包括无线通信、以太网通信等。
5. 仿真模块:仿真模块用于对高空作业机器人的控制系统进行模拟和测试,以验证系统设计的正确性和稳定性。
常用的仿真软件有MATLAB、Simulink等。
三、高空作业机器人控制系统的仿真方法高空作业机器人的控制系统设计需要进行仿真验证,以保证系统的可靠性和性能。
以下是常用的仿真方法:1. 动力学仿真:通过建立机器人的动力学模型,仿真机器人在高空环境中的运动特性和响应。
剪刀式液压升降平台的设计与仿真讲解

毕业设计(论文)译文及原稿译文题目:剪刀式液压升降平台的设计与仿真Design and Simulation Based on Pro/E for a Hydraulic Lift 原稿题目:Platform in Scissors TypeBeijing Union University, Beijing Chaowai baijiazhuang, 原稿出处:Beijing 100020, China剪刀式液压升降平台的设计与仿真剪式升降平台具有很广的运用范围,它由主平台、升降机构和底部三部分组成。
从低到高升起,剪刀撑起,装有多个液压缸,它的移动方式有牵引、自行式、升压等。
剪刀升降机构升降高度的剪刀撑柱和气缸布置。
本文讲述的是一个基于三维软件mm的剪式升降平台。
这个产品具有一个Pro/E 设计的高8m,平台尺寸为1800×9002额定负载的功能,使整个平台可以建立2对剪刀。
该平台的设计是折叠门,以节省更多的空间,方便存储。
升降平台采用液压驱动,运行平稳、稳定、精度高。
1 简介升降平台是一种垂直升降设备,可用于室内或室外,具有相当大的应用空间。
它可以应用在机械行业、自动化生产线、地下室和物流线路等。
剪式升降平台是升降平台中应用最广泛的一种类型。
剪式举升机执行部分采用剪式叠杆形式,电力驱动机械传动结构,目前广泛应用于大型车辆维修。
剪式举升机的举升速度适中且不占用车坑位置,对于一些车型相对固定,工作强度大的修理领域无疑是最好的选择,而且由于结构简单,同步性好,一般常用作四轮定位仪的平台。
剪式举升机分为大剪,小剪举升机,超薄系列剪式举升机等几种类型。
小剪举升机主要用于汽车维修保养,安全性高,操作方便,挖槽后与地面相平。
大剪举升机涌出比较多,是配合四轮定位仪的最佳设备,并可以作为汽车维修,轮胎,底盘检修用。
可以挖槽,也可以直接安装在地面上。
超薄系列剪式举升机无需挖槽,适用于任何修理厂,有一些楼板上不合适安装二柱举升机一级普通四柱举升机,而本机器与楼板接触面广,这样可以安装在任何可以开车的楼板上面,解决客户场地问题,这类机器是今后的主流产品,国外大规模使用本产品。
基于ADAMS的剪式升降平台的仿真与优化

基于ADAMS的剪式升降平台的仿真与优化作者:桑锦凯徐世福叶圣义来源:《机电信息》2020年第11期摘要:对剪式升降平台的结构进行了简要分析,利用CAD软件绘制了升降平台的模型图纸,利用ADAMS软件进行了平台建模及仿真,并对平台连杆进行了受力分析,在此基础上,对连杆进行了优化,同时通过在平台上增加梯形槽降低了平台的总重量。
关键词:虚拟样机;剪式升降平台;建模;仿真;PROE;ADAMS0 引言虚拟样机技术是当前设计制造领域的一门新技术,可应用于汽车制造、工程机械、航空航天、通用机械等诸多领域。
虚拟样机技术在工程咨询方面具有很高的应用价值,可为产品研发提供预测试功能。
虚拟样机技术又被称为动态仿真技术,是指产品在研发制造过程中,利用计算机对产品的各个零件进行虚拟建模,并在计算机中完成组装,为产品添加相应的现实工作状况的模拟条件,最后利用计算机的运算能力推测出产品的整体性能,进而实现改进产品设计,提高产品质量的目的。
1 剪式升降平台的结构分析剪式升降平台一般由平台、升降机构和底座3个部分构成。
双向丝杠的剪式升降平台的连杆数目和丝杆螺距决定了平台升降的高度和速度。
其中,自行式平台底座的设计最为精密紧凑,在研制自行式平台的剪式起升零部件时,涉及起升油缸与平台底座内各零部件的几何关系,要避免相互干涉,例如当剪叉臂杆处于初始状态时,其不可与起升油缸有接触或互相形成压力;平台底座内零部件也不可与起升油缸有任何接触等。
2 剪式升降平台模型的建立与仿真2.1 绘制模型图纸(1)通过CAD 2007软件绘制剪式升降平台的二维装配图,如图1所示。
(2)绘制剪式升降平台的三维装配图:利用PROE软件描绘该平台的各个元件图,并将元件图组合为三维装配图。
图2为PROE软件绘制的三维剪式升降平台模型。
2.2 平台仿真将剪式升降平台模型导入ADAMS中,对模型的各个零件进行命名并对各个零件添加质量。
通过软件分析可知,升降平台质量为3.5 kg,分析平台各个零件后计算得到升降平台的总质量为8.5 kg。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录目录 (1)第1章绪论 (3)1.1 课题背景 (3)1.2设计内容 (3)1.3 AMESim (4)1.3.1 AMESim简介........................................................................................... 错误!未定义书签。
1.3.2 AMESim操作简要: (4)第2章液压系统的设计计算及选型 (11)2.1液压系统的计算 (11)2.1.1四个支腿液压缸的计算 (11)2.1.2梯架支承缸 (12)2.1.3 工作压力的复算 (13)2.2液压缸的选择 (14)2.3拟定液压系统原理图 (14)2.4液压系统动作顺序 (15)2.5选择液压元、辅件 (16)2.5.1执行器工作压力列表 (16)2.5.2单个液压执行器实际所需流量 (16)2.5.3液压泵的选择 (17)2.5.4液压阀的选择 (17)2.5.5液压油 (19)2.5.6油管 (19)2.5.7油箱容积 (19)2.5.8过滤器 (19)第3章液压系统的仿真 (20)3.1支腿回路的仿真及结果。
(20)3.1.1支腿回路图 (20)3.1.2各元件设置 (21)3.1.3运行结果及其分析................................................................................. 错误!未定义书签。
3.1.4其他工况分析 (32)3.2梯架回路 (39)3.2.1梯架回路图 (39)3.2.2回路各元件设置 (39)3.2.3运行结果 (45)致谢 (55)参考文献 (56)第1章绪论1.1 课题背景现有的升降台系统,应用最多的就是以汽车作为载体的升降台,在汽车上安装梯架,梯架可以绕着固定的轴在液压缸的作用下抬升,现有的升降台是以汽车马达作为动力,定量泵提供液压油,其梯架和汽车支腿的运动是匀速的运动,到达一定高度后停止运动,下降的期间也是匀速运动,虽然运动的速度平稳,但是在液压系统的速度是恒定的,不能实现加速和减速,因而灵活性降低,效率也会受到影响,同时,在启动和换向的时候会带来刚性冲击,对液压元件的寿命也会产生影响,并且安全系数降低,鉴于此,我们在现有的液压系统中,增加一个调节速度的元件调速阀,这样就可以实现梯架在升起和降落时的速度调节,在梯架运动过程中实现速度的变化,同时在换向和启动时的刚性冲击也就变为柔性冲击,对整个液压系统的灵活性、效率和使用寿命都将是一次巨大的改进。
1.2设计内容本课题为高空作业平台升降机构设计与仿真。
液压系统为各个机构提供动力。
它分为动力装置、控制调节装置、执行元件、辅助装置、工作介质五部分。
液压系统具有传送能量大、布局容易、结构紧凑、换向方便、转动平稳均匀、容易完成复杂动作等优点,因而广泛应用于工程机械领域。
经过老师的指导及成员间的讨论,本次设计的创新之处在于在梯架的进口管路中,加入调速阀,从而梯架液压缸在运动过程中实现速度的调节,视情况而加速或者减速,同时减小刚性冲击,以实现运动的更加平稳。
确定在车架下部设四个支承液压缸以保证平稳运行;在梯架上安装两个液压缸以实现梯架的上升。
另外,为了防止梯架在空中静止时因自重而缓慢降落,于是要设定平衡回路。
1.3 AMESim1.3.1 AMESim简介AMESim 为多学科领域复杂系统建模仿真解决方案(英文缩写:Advanced Modeling Environment for Simulation of engineering systems),引领着世界协同仿真之路。
AMESim提供了一个系统工程设计的完整平台,使得用户可以在一个平台上建立复杂的多学科领域系统的模型,并在此基础上进行仿真计算和深入的分析。
用户可以在AMESim平台上研究任何元件或系统的稳态和动态性能。
例如在燃油喷射、制动系统、动力传动、机电系统和冷却系统中的应用。
面向工程应用的定位使得AMESim成为在汽车、液压和航天航空工业研发部门的理想选择。
工程设计师完全可以应用集成的一整套AMESim应用库来设计一个系统,所有的这些来自不同物理领域的模型都是经过严格的测试和实验验证的。
AMESim 使得工程师迅速达到建模仿真的最终目标:分析和优化工程师的设计,从而帮助用户降低开发的成本和缩短开发的周期。
工程师在一个基于工程应用的AMESim友好环境下可研究任何元件或者系统的稳态和动态性能。
AMESim的图形化用户界面使得用户可以在完整的应用模型库中选择需要的模块来构建复杂系统的模型。
建模仿真过程分为四个步骤:构建方案的模型;选择模型复杂程度;设定模型的参数;仿真计算分析。
简便易用的操作使得用户可以迅速有效地进行产品的设计开发。
AMESim专门为液压系统建立了一个标准仿真模型库,如图1所示(部分元件):图1 标准液压元件库鉴于液压系统的元件多式多样,标准库无法满足所有的建模要求,AMESim提供了一个基本元件库设计HCD(Hydraulic Component Design),利用HCD,用户可以建立标准库中没有的液压模型,当然也可以建立标准库中提供有的模型。
如图2所示(部分元件):图2 HCD元件库1.3.2 AMESim操作简要:一:左边栏进入界面后单击“File”可新建或打开一个AMESim的文件。
如下图打开一个文件后界面如图1:在左边栏上部有四个带有颜色的标签,当前第一个标签处于按下的状态,表示软件处于建模状态,这时可以编辑回路。
2:第二个标签是在建好模以后,系统会在自己的模型库内选择以便与已建好的模型相匹配。
注意必须在已经确定第一步已经完成的情下点按第二个标签,如果第一步的模型没有建好,比如还有原件没有连接正确,模型有开路等情况下都按不下第二个标签,系统会提示有错误。
如果是新建的模型或对打开的原文件有改动,按下第二个标签后,模型内还没有匹配的元件会反色显示出来,这时一般按下第五个标签即可,系统会自动匹配最近的模型3:第二部完成后再点第三个标签,此时双击模型中的任一原件,会弹出一个对话框,在对话框中可以对各元件的参数进行编辑修改4:第三部完成后就可以点第四个标签了。
此时左边栏的最下面三个标签也带有颜色了,表示可以点击运行了。
如下图(向左旋转90度)从下边(右边)数第三个标签点开后可以设置整个模型运行的时间以及采样间隔,如下图设置好点OK即可,此时点击下边数第二个就可以运行了。
如果在运行过程中要中止运行,点下边第一个按钮即可停止运行。
运行时会弹出一个框,如图如果模型没有错误运行完毕后关闭即可。
若有错误,在刚才的框中Warnings栏中会显示错误原因,从而改正错误。
二:右边栏右边栏只有在建模时才会显示,它包括了各种各样的模型,分别放在不同的分类中,我们要用到的主要是液压标准件库Hydraulic以及信号库Signal。
如图:三:仿真结果运行完毕后点击任一个元件,会弹出对话框,如图选中框里面的一个选项如上图所显示的是端口一的位移,然后点Plot即可得到端口一的位移曲线,如图这就是质量块的位移曲线。
同样也可以把多个参数的曲线在同一个图中表示出来。
第2章 液压系统的设计计算及选型2.1液压系统的计算2.1.1四个支腿液压缸的计算设车体总重为10t ,则G=100KN根据载荷选择工作压力为P 1=6 MPa ,确定往返速比ψ=1.33 于是d=0.5D假定液压缸机械效率为η=0.95为防止工进结束时前冲,液压缸需保持一定回油背压,暂定背压P 2=0.5 MPa于是液压缸无杆腔的有效面积 1A =212FP P η⎛⎫-⎪⎝⎭=)25.06(95.025000-=45.8⨯410-2m 内径D=14A π=0.08m=80mm按GB/T 2348-1993 选用标准值D=80mm 活塞杆直径d=0.65D=52mm (标准值)故液压缸实际面积1A =50.5 2cm2A =4π(2D -2d )=4π(280-252)=29 2cm 假定液压缸工作时速度为1v =15 mm/s 即0.015m/s则流量1q =1A 1v =50.5⨯0.015⨯410-=4.55L/min收回时2v =1.331v =0.01995m/s s m /02.0≈2q =2A 2v =29⨯0.015⨯1.33⨯410-=3.47L/min2.1.2梯架支承缸梯架总重(有负载)估为2t 。
(无负载时为500Kg)在开始时需要的力最大,设为F 液压缸与水平面夹角约为100则 2F ⨯0.5⨯sin 20︒=5000⨯4⨯cos 10︒F=57587N如图所示,L1=0.5m*sin 010*2=0.1736m m 4.17≈L3=0030cos 110cos 5.0⨯-⨯LL2=2235.0L -=cm m 5.36365.0342.05.022==- cm cm cm L 1.194.175.36=-=∆为仿真方便,特取液压缸伸长到10cm 来计算。
工作压力定为5MPa ,往返速比ψ=1.33,则d=0.65D ,假定液压缸机械效率为 η=0.95, 背压P 2=1 MPa1A =212FP P η⎛⎫- ⎪⎝⎭=168.39⨯410-2mD=14A π==0.1465m=146.5mm按GB/T 2348-1993 选用标准值D=150mm活塞杆直径d=0.65D=97.5mm ,选用标准值d=100mm 。
于是液压缸实际面积1A =4π2D =176.62cm 2A =4π(2D -2d )=4π(22100150-)=98.132cm 假定25s 内匀速升到最大高度,则运动的平均速度v =s cm cm t l /4.02510≈=∆, 即0.004m/s ,最大速度为0.008m/s.于是1q =1A 1v =176.6⨯0.008⨯410-=8.48L/min收回时2v =1.331v =0.011m/s2q =2A 2v =98.13⨯0.011⨯410-3m /s=6.23L/min2.1.3 工作压力的复算复算执行原件的工作压力 无杆腔进油阶段P1=Mp Mp P A A A F 63.416.17613.98106.1767198542121=⨯+⨯=⋅+-2.2液压缸的选择液压缸 缸内径Dmm活塞杆直径dmm 型号数量底部支腿液压缸8052HSGL-8040AE-EC 4梯架液压缸150 100 HSGL-12563BE-EC22.3拟定液压系统原理图注:A为四个支腿液压缸。
B为两个梯架的变幅液压缸&1是支腿的自锁机构,由两个液控单向阀组成,防止车体升起后下落。