小型绘图系统-YK
matlab软件仿真实验(信号与系统)(1)
matlab软件仿真实验(信号与系统)(1)《信号与系统实验报告》学院:信息科学与⼯程学院专业:物联⽹⼯程姓名:学号:⽬录实验⼀、MATLAB 基本应⽤实验⼆信号的时域表⽰实验三、连续信号卷积实验四、典型周期信号的频谱表⽰实验五、傅⽴叶变换性质研究实验六、抽样定理与信号恢复实验⼀MATLAB 基本应⽤⼀、实验⽬的:学习MATLAB的基本⽤法,了解 MATLAB 的⽬录结构和基本功能以及MATLAB在信号与系统中的应⽤。
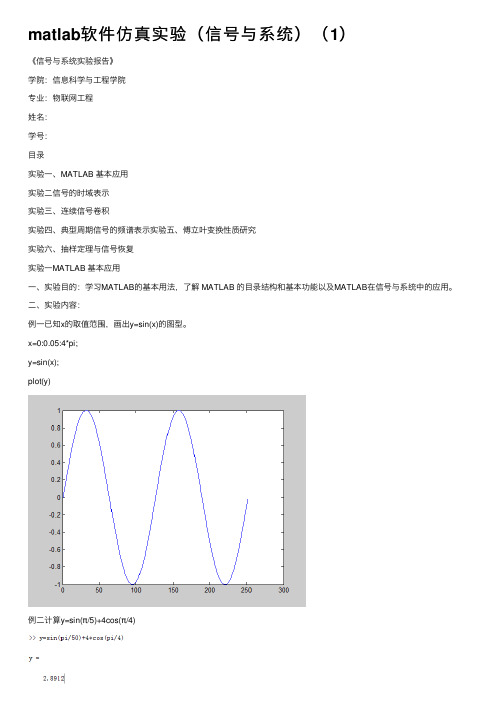
⼆、实验内容:例⼀已知x的取值范围,画出y=sin(x)的图型。
x=0:0.05:4*pi;y=sin(x);plot(y)例⼆计算y=sin(π/5)+4cos(π/4)例三已知z 取值范围,x=sin(z);y=cos(z);画三维图形。
z=0:pi/50:10*pi;x=sin(z);y=cos(z);plot3(x,y,z)xlabel('x')ylabel('y')zlabel('z')例四已知x的取值范围,⽤subplot函数绘图。
参考程序:x=0:0.05:7;y1=sin(x);y2=1.5*cos(x);y3=sin(2*x);y4=5*cos(2*x);subplot(2,2,1),plot(x,y1),title('sin(x)')subplot(2,2,2),plot(x,y2),title('1.5*cos(x)')subplot(2,2,3),plot(x,y3),title('sin(2*x)')subplot(2,2,4),plot(x,y4),title('5*cos(2*x)')连续信号的MATLAB表⽰1、指数信号:指数信号Ae at在MATLAB中可⽤exp函数表⽰,其调⽤形式为:y=A*exp(a*t) (例取 A=1,a=-0.4)参考程序:A=1;a=-0.4;t=0:0.01:10;ft=A*exp(a*t);plot(t,ft);grid on;2、正弦信号:正弦信号Acos(w0t+?)和Asin(w0t+?)分别由函数cos和sin表⽰,其调⽤形式为:A*cos(w0t+phi) ;A*sin(w0t+phi) (例取A=1,w0=2π,?=π/6) 参考程序:A=1;w0=2*pi; phi=pi/6; t=0:0.001:8;ft=A*sin(w0*t+phi);plot(t,ft);grid on ;3、抽样函数:抽样函数Sa(t)在MATLAB中⽤sinc函数表⽰,其定义为:sinc(t)=sin(πt)/( πt)其调⽤形式为:y=sinc(t)参考程序:t=-3*pi:pi/100:3*pi;ft=sinc(t/pi);plot(t,ft);grid on;4、矩形脉冲信号:在MATLAB中⽤rectpuls函数来表⽰,其调⽤形式为:y=rectpuls(t,width),⽤以产⽣⼀个幅值为1,宽度为width,相对于t=0点左右对称的矩形波信号,该函数的横坐标范围由向量t决定,是以t=0为中⼼向左右各展开width/2的范围,width的默认值为1。
数字信号实验报告材料 (全)
数字信号处理实验报告实验一:用 FFT 做谱分析 一、 实验目的1、进一步加深 DFT 算法原理和基本性质的理解。
2、熟悉 FFT 算法原理和 FFT 子程序的应用。
3、学习用FFT 对连续信号和时域离散信号进行谱分析的方法,了解可能出现的分析误差及其原因,以便在实际中正确应用 FFT 。
二、实验原理用FFT 对信号作频谱分析是学习数字信号处理的重要内容。
经常需要进行谱分析的信号是模拟信号和时域离散信号。
对信号进行谱分析的重要问题是频谱分辨率D 和分析误差。
频谱分辨率直接和FFT 的变换区间N 有关,因为FFT 能够实现的频率分辨率是2π/N ≤D 。
可以根据此时选择FFT 的变换区间N 。
误差主要来自于用FFT 作频谱分析时,得到的是离散谱,而信号(周期信号除外)是连续谱,只有当N 较大时离散谱的包络才能逼近于连续谱,因此N 要适当选择大一些。
周期信号的频谱是离散谱,只有用整数倍周期的长度作FFT ,得到的离散谱才能代表周期信号的频谱。
如果不知道信号周期,可以尽量选择信号的观察时间长一些。
对模拟信号的频谱时,首先要按照采样定理将其变成时域离散信号。
如果是模拟周期信号,也应该选取整数倍周期的长度,经过采样后形成周期序列,按照周期序列的谱分析进行。
三、实验内容和步骤对以下典型信号进行谱分析:⎪⎩⎪⎨⎧≤≤-≤≤-=⎪⎩⎪⎨⎧≤≤-≤≤+==其它nn n n n n x 其它nn n n n n x n R n x ,074,330,4)(,074,830,1)()()(32414()cos4x n n π=5()cos(/4)cos(/8)x n n n ππ=+6()cos8cos16cos20x t t t t πππ=++对于以上信号,x1(n)~x5(n) 选择FFT 的变换区间N 为8和16 两种情况进行频谱分析。
分别打印其幅频特性曲线。
并进行对比、分析和讨论;;x6(t)为模拟周期信号,选择 采样频率Hz F s 64=,变换区间N=16,32,64 三种情况进行谱分析。
俄语电子计算机专业词汇教学文案
俄语电子计算机专业词汇精品文档电子计算机专业词汇KOMnbsep计算机Hoym6yK笔记本电脑MOHUTOp显示器尔ugKOKpucTannuuecKu荷MOHUTOP液晶显示器KnaBuaTypa 键盘MMfflKa鼠标KOBpUK gn分 MMfflKH 鼠标垫pacKnagKa输入法BepHyTbc分 O6paTHO 返回Ha rnaBHyg cTpaHu口y 返回首页KOnuuecTBO nocemeHu而访问次数60nb皿e ccbinOK 更多链接ca荷T B pa3pa6OTKe网页正在建设中npo^eccop CPUOnepaTUBHa兄 naM分Tb 内存MamepuHcKa分 nnama 主板尔ecTKu而gucK 硬盘gucKOBOg软马区6nOK 6ecnepe6OHHOrO numaHu只稳压电源3ByKOBa分 KapTa 声卡BugeOKapTa 显卡cKaHep扫描仪收集于网络,如有侵权请联系管理员删除精品文档MMmb onTHHecKaa 光电鼠标nasepHMH npuHTep 激光打印机CTpyHHMH npUHTep喷墨打印机pacxogHbie MaTepuanbi 耗材3apagHoe ycTpo而CTBO充电器KonupOBanbHbi荷 annapaT 复印机口u巾poBaaKaMepa(annapaT)数码照相机口u巾poBo而guKTo巾OH数码录音机Ko尔aHHb应Hexon皮套(照相机,手机等) MUHUTunorpa巾ua轻型印刷机3BOHOK gna COTOBMX手机铃声Menogua gna COTOBMX手机音乐铃声CmaHgapTHbie 附件KonupoBaTb 复制PacmupeHHMH 巾unbTp 高级筛选①opMaT;①opMamupoBaHue 格式no mupuHe oKHa根据窗口调整表格no cogep尔uMoMy根据内容调整表格Perucmp更改大小写O6HOBUTE gaHHbie 更新数据CepBuc; CpegcTBa 工具naHenu uHcTpyMeHToB 工具栏收集于网络,如有侵权请联系管理员删除精品文档Web-KOMnoHeHTM Web 工具箱H HCT工作表①opMyna公式AocTyn K KHure共享工作簿①uKcupOBaHHa分皿upuHa CTOU6口a 固定列宽3aKpMTb 关闭3aBep皿eHue pa60Tbi 关机①yHKuu分函数noBTOpuTb npeo6pa3OBaHue 汉字重组06beguHUTb分ue荷KU合并单元格06beguHUTb KHuru 合并工作簿KoHeonuga口u分合并计算06beguHuTb uenpaBneHu分合并文档06beguHuTb 3HaKu 合并字符「opu3OHTanbHa只横排MaKpoe 宏BoeeTaHOBuTb 还原Kop3uHa回收站PueoBaHue 绘图HapueoBaTb Ta6nuuy 绘制表格BHe皿Hue gaHHbie获取外部数据KanbKyn分Top计算器收集于网络,如有侵权请联系管理员删除精品文档①opMa记录单BnOKHOT记事本HagcTpo而KU力口载宏Bbipe3aTb 剪切By巾ep o6MeHa剪贴板KapTUHKU剪贴画Ha荷TU u ycTpaHUTb检测与修复nepeKpecTHa分 ccbinKa 交叉弓[用PegaKTOp c口eHapueB 脚本编辑器C HOCKU脚注CHocKa脚注和尾注npuHWTb/oTKnoHuTb ucnpaBneHu只接受或拒绝修订nycK; npucmyna分K pa6ome 开始ConuTep空当接龙SneMeHTM ynpaBneHu分控件工具箱naHenb ynpaBneHu只控制面板8pnbiK gn分(aero)快捷方式PaMKu框架PaMKu框架集Co cKaHepa unu KaMepw 来自扫描仪或相机03巾a荷na来自文件Internet Macmep nogKngaeHu分K HHTepHemy 连接向导收集于网络,如有侵权请联系管理员删除精品文档y^acTHUK co6paHu分no cemu 联机会议参加人CoBMecTHa分pa6oTa联机协作C B“U链接C TOU6口BI cnpaBa 列(在右侧)C TOU6口BI cneBa 列(在左侧)C TOU6口BI列山upuHa列宽CoxpaHUTb KaK 另存为CoxpaHUTb KaK Web-cTpaHu口y 另存为页Web3ByKo3anucb 录音机HanaTb 3anucb 录制新宏H M分名称KoMaHgHa分cmpoKa命令提示符山a6noHBi u HagcTpo荷KU模板和加载项Ta6nuua nogcmaHoBKu 模拟运算表CopTupoBKa 排序npuMenaHue 社匕注npaBonucaHue 拼写npaBonucaHue u Op巾orpa巾u分拼写和语法①oHeTuuecKoe pyKoBogcTBo 拼音指南B BIPOBH分TE mupuHy CTOU6口OB平均分布各列BblpoBH分Tb BBicoTy cTpoK 平均分布各行收集于网络,如有侵权请联系管理员删除精品文档SkpaHHaa KnaBuamypa 屏幕键盘06MHHMH普通Apyrue 口Bema其他颜色ABTO3arpy3Ka 启动OaucTUTb 清除OTMeHa取消Ha3HauuTb co6paHue 安排会议Be3onacHOCTb 安全性Bepcuu版本Web-goKyMeHT 版式WebCnpaBKa 帮助CoxpaHUTb 保存CoxpaHUTb pa6ouyg o6nacTb 保存工作区3amura保护3amuTUTb KHury u gaTb o6卬u荷gocryn保护并共享工作簿3amuTUTb UUCT保护工作表3a^uTuTb KHury保护工作簿YcraHoBuTb 3a^ury 保护文档ApxuBa口u分 AaHHbix 备份①OH背景CpaBHuTb Bepcuu 比较文档rpaHu口BI u 3anuBKa 边框和底纹收集于网络,如有侵权请联系管理员删除精品文档npaBKa编辑H3MCHHTb 3anpOC 编辑查询CTpOKa巾opMyn编辑栏PegaKTop编辑器HKHCHKa 标尺3aronoBKH标题行重复npuMeuaHue 标志CmaHgapTHa分皿upuHa 标准列宽Ta6nuua 表格Ta6nu口bi u rpaHu口bi 表格和边框CBOHCTBa Ta6nuubi 表格属性npeo6pa3OBaTb B TCKCT表格转换成文字A BTO巾opMaT表格自动套用格式napaMeTpbi 参数BcraBKa; 〃o6aBUTb 插入Ha荷TU查找Pa3genuTb 拆分Pa36uTb Ta6nuuy 拆分表格Pa36uTb aneHKu 拆分单元格CmaHgapTHa只常用Ha3epHMH npourpbiBaTenb 唱机CD 「unepccbinKa超级链接收集于网络,如有侵权请联系管理员删除精品文档「unepTepMUHan 超级终端OTMeHHTb yganeHue 撤消清除nporpaMMM 程序no Map皿pymy传送收件人KoMnb^TepM OTeneeTBeHHoro npou3BogcTBa 国产电脑uMnopTHbie KOMnb^TepM进口电脑CBepxKoMnaKTHbie KoMnb^TepM 超小型电脑Pa6ouue cTaH口uu 工作站HacTonbHMH KoMnb^Tep 台式电月脑KopMaHHMH/pyHHoH KoMnb^Tep 掌上电月脑aneKTpoHHMH cnoBapb 电子词典nepeBoguuKu翻译机,翻译产品Kopnyc机箱MogHbi荷Kopnyc新潮机箱nonynapHMH Kopnyc 流行的机箱CPU-npo口eccopbi HOBOFO noKoneHu分新一代处理器尔ene3Hbl荷pa3roH/pa3roH尔ene3a硬件加速TecTbi u 0630Pbi cBe尔ero 尔ene3a 新硬件测评A UCKOBOA gn分 KOMnaKT-gucKOB 光"区KOMnaKT-gucK TonbKO gn分HUTCHU只只读光盘AucKeTa/巾nonnu-gucK 软盘HrM^/HaKonuTenb Ha FU6KUX MarHuTHbix gucKax 软盘驱动器,软驱HUCT分卬a分gucKema 清洗盘收集于网络,如有侵权请联系管理员删除精品文档BagHymaa gucKema有坏道的磁盘BHyTpeHH兄兄 HaMaTb 内存ocHOBHaa naMaTb 主存Bugeo KapTbi 显卡PCI-Bugeo KapTwPCI 显卡AGP-Bugeo KapTwAGP 显卡naMaTb Bugeo KapTbi 显存求ecTKue gucKu 硬盘npocTpaHCTBo 尔ecTKoro gucKa 硬盘空间pesepBupoBaHue 尔ecTKoro gucKa 备份硬盘HaKonuTenu 存储器napTu口ua/Ta6nuua pa3genoB 磁盘分区表pa3gen 尔ecTKoro gucKa 磁盘分区ucnpaBneHue 尔ecTKoro gucKa 修复硬盘ceTeBaa KapTa 网卡H求M〃/HaKonuTenb Ha 尔ecTKux gucKax 硬盘驱动器nepu巾epua外围设备,外设CeHcopHoe o6opygoBaHue 传感装置M OHUTOP监视器MoHoXpoMHMH MoHuTop 单色显示器nnocKu荷MOHUTOP平面监视器nna3MeHHMH MOHUTOP等离子监视器3KpaH屏幕收集于网络,如有侵权请联系管理员删除精品文档npoeKTop投影仪3a^HTHMH 3KpaH 保护屏YcTpoHCTBa BBoga 输入装置yMHa兄KnaBuaTypa智能键盘MynbTUMegua 多媒体aKceccyap 附件MUKpo巾OH话筒Hay皿HUK耳机MIDI KnaBuaTypaMIDI 键盘MP3 nneepMP3 播放器gUKTo巾OH录音机gep尔aTenb KOHUH拷贝存放夹npuHTep打印机MaTpUHHMH npuHTep 矩阵式打印机cTpyHHMH npuHTep喷墨式打印机na3epHMH npuHTep 激光打印机na3epHo-口BCTHEI H npuHTep 激光彩色打印机nnoTepbi绘图机BBog BMBog-Bugeo图像输入输出BBog u3o6pa尔eHuH图形输入cKaHep扫描仪BMCOKOCKOPOCTHOH cKaHep 高速扫描仪收集于网络,如有侵权请联系管理员删除精品文档KaMepa摄像镜头uHTep巾e而cbi 接口3a^HTa nuTaHu分断电保护CTa6unu3aT0p 稳压器Konup复印机aHanoroBMH Kanup 摸拟式复印机口u巾poBbi而Kanup 数字式复印机nonHO口BeTHbi荷Kanup 全彩色复印机gy6nuKaTop复印机,影印机UH尔eHepHbi荷gy6nuKaTop工程复印机KapTpug尔u粉盒MaTpuuHbie KapTpug尔u 矩阵式粉盒CTpy荷Hbie KapTpug尔u 喷墨墨盒KapTpug尔u KonupoB 影印机墨粉盒KapTpug尔u nnoTepoB 绘图仪墨盒KapTpug尔u巾aKcoB 传真机墨盒Ka6ew6电缆Ka6enu nuTaHu只供电电缆Ka6enb MogeMHbi而调制解调器电缆npuHTepHMH Ka6enb 打印机电缆SCSI-Ka6enuSCSI 接口电缆USB-Ka6enu USB 接口电缆收集于网络,如有侵权请联系管理员删除精品文档nepexogHUK电缆转接头,转接接口O巾ucHa兄TexHUKa力、公用品numy^aa MamuHKa 打字机KanbKyn分Top计算器xanaBa免费软件供应OnepcucTeMM ;Onepa口uoHHbie cucmeMM 操作系统onepa^ua KOMnbgrepa 计算机操作Pa6oHUH cTon 桌面OKHO/BUHgyc 视窗巾OHEI gna pa6ouero cTona工作桌面背景o6ou壁纸,墙纸apoTunecKue o6ou 性感壁纸Hynmaa no cogep尔aHug KonneK口ua.最棒的写真集3KpaH/cKpUH 屏幕MO荷KoMnbgTep 我的电脑MycopHuK回收站aKTuBHMH cTon活动桌面CBOHCTBO属性xpaHuTent 3KpaHa屏幕保护屏保Sxcnnopep资源管理器3aKnagKa 书签go6aBnaTb B 3aKnagKu 力口入书签收集于网络,如有侵权请联系管理员删除精品文档go6aBnwTb B u36paHHoe 力口入收藏夹CepBuc OHna而H-3aKnagoK在线书签服务gupeKTOpu分目录KOpeHHa分 gupeKTOpu分根目录cy6gupeKTOpu分子目录goKyMeHT/巾a荷n 文件gOKyMeHT.巾a荷n TOUEKO gn分HUTCHU只只读文件巾a荷n cucTeMM系统文件CKpMTMH巾a荷n隐藏文件①a荷n noMORu帮助文件ucnonHaeMMH巾a而n 可执行文件naKOBaTE巾a而noB 文件打包ucnonHwrb巾a荷n 执行文件OTKpMTE巾a荷n 打开文件巾a荷nM onpegeneHHoro巾opMama 指定格式的文件coxpaH分TE goKyMeHT 保存文件npocMaTpuBaTE, go6aBnwrb u yganwrb 巾a荷nM 浏览、增加和删除文件①a而n-MeHeg尔epM文件管理器O6MHHM荷apxuBaTOp文件管理员,文件管理工具O巾UCHM荷co巾T办公软件uHcrann分口u兄co巾Ta软件安装ycraHaBnuBaTE nporpaMMy 安装软件收集于网络,如有侵权请联系管理员删除精品文档npuKnagHbie nporpaMMHbie naKeTM 实用软件包Me尔gyHapogHbi荷 co巾TOBO荷 ruraHT 国际软件巨头nporpaMMM gn分o巾uca力、公自动化程序CucTeMbi 6e3onacHocTu 安全系统cucTeMHbie pecypcbi 系统资源anTUMu3a口u兄CUCTCMEI系统优化MynbTUMegua 多媒体o6pa6oTKa rpa巾UKU图片制作ayguonneep 音频播放器Audio Playerrura6a而T G 字节,十亿字节6uT/gBouuHa分口u巾pa 位,比特〈二进制>)尔3biKu nporpaMMupoBaHu分编程语言npuKnagHbie nepeKogupoB卬UKU实用编码工具ucxogHuK/ ucxogHMH TeKcT nporpaMMbi 程序源代码,源程序B3noM卬uK/Cracker破密程序,解密工具nepeMeHHa分变量nepeMeHHa分口uKna循环变量收集于网络,如有侵权请联系管理员删除精品文档CTpoKOBa分nepeMeHHa分字符串变量口enouucneHHa分 nepeMeHHa分整型变量UM兄nepeMeHHOH变量名noKanbHa分nepeMeHHa分局部变量rno6anbHa分nepeMeHHa分全局变量06b兄BUTE nepeMeHHyg 声明变量巾yHKuu分函数npo口egypa 过程aneMeHTM ynpaBneHu分控件Hucnagagmee MeHg下找式菜单o6nacTb npocMoTpa 视图区co6birue no Ta而Mepy定时器事件,timer事件KnaBuma ycTaHoBKu 单选按钮巾na尔oK/ueK6oKc复选框KnaBuma 按钮收集于网络,如有侵权请联系管理员删除精品文档卬enuoK单击dBOHHOH 卬eUHOK 双击6bicTpa分KuaBu皿a 快捷键yTuuuTa实用程序,应用程序,实用工具pyccKO“biHHa分yrunuTa俄语软件,俄语版本的实用工具软件nuaruH插件MHoroqBbiHHbi荷uHTep巾e而c 多语言界面3aperucTpupOBaTb nporpaMMM 注册软件nocuegHue (cBe尔ue) Bepcuu nporpaMM 软件最新版本geMO-Bepcu只演示版nouHa分Bepcuu 3Toro co巾Ta 该软件的完全版CKUHM skin 皮肤6ecnuaTHMH nuaruH 免费插件pyccu巾uKauu只使之变成俄文界面,俄化pyccu巾uKaTop俄化工具KuTauccu巾uKaTOp汉化工具收集于网络,如有侵权请联系管理员删除精品文档pecTUHr 休闲pyccu巾uKauu分/KUTa荷ccu巾uKauu分 Be而6-CTpaHu口网页俄/汉化zip-yTunuTa文件压缩工具ucnpaBneHue cKanaHHMx u noBpe尔geHHbix zip-巾a而noB 修复被损坏的下载压缩文件naKOBKa打包,给文件压缩pacnaKOBKa解包,压缩文件解压c尔aTue压缩ceTu网络CeTeBoe o6opygoBaHue 网络设备MogeM调制解调器aganTep适配器TepMUHaTop端子,终端cepBep服务器MOCT网桥rnn^3网关收集于网络,如有侵权请联系管理员删除精品文档Map皿pyTU3aT0p 路由器cepBep服务器FTP- cepBep FTP服务,服务器TepMHHanbHMH cepBep 终端服务器K OH口eHTpaTop 网络集线器,hubaKKayHT 帐号uHTepHeT u noKanbHbie ceTu 因特网和局域网XOUCT主机B36MacTep网站管理员Be荷6-ca荷T网站nepcoHanbHMH ca荷T个人站点Me尔cemeBO荷 agpec/B36-agpecoB 网址KOHcpyK口u分B36-ca荷Ta 网站建设/设计goMeHHoe UM分域名cepBuc服务收集于网络,如有侵权请联系管理员删除精品文档OHna荷H在线O巾巾na而H离线06pbIB CBq3U 掉线aBTOgO3BOH自动声音提示aBTOgO3BOH自动拨号npOKCu代理OHnaHHOBMH pecypc 在线资源BwcTpMH gocTyn 快速登录aHOHHMHMH gocTyn 匿名登录OguH U3 KpynHe而皿ux pyccKOq BEIUHEIX KaTanoroB nporpaMM 最大的俄语软件查询站点CB分3aHHEie ccEinKaMu ca而TEI相关弓[用站点nocTaBRUK ycnyr HHTepHeT/npOBa荷Bep- INTERNET 服务商Ca荷T O6HOBU兄emc兄e尔egHeBHO.网站每日更新。
基于AutoCAD的管线数据采集系统的研究
的格 式为 :
[ 水] 给
S PPOI =5 NT S PLI NE1=5 S PEXPTEXT=5
[ 水] 排
WS P0I =1 NT 6 W SLI NE1=1 6
WS XP E E T XT=1 6
W S RECT1 DI 0N = 】 6
其 中“ 给水 ] 表示 一 个 S c o , S P I T 表示 [ ” et n “ P O N ” i
值 , 式 为 K y Vle 格 e= a 。 u
如 , “cii文 件 中存储 每一 类管 线 的 图层 信息 在 t.n”
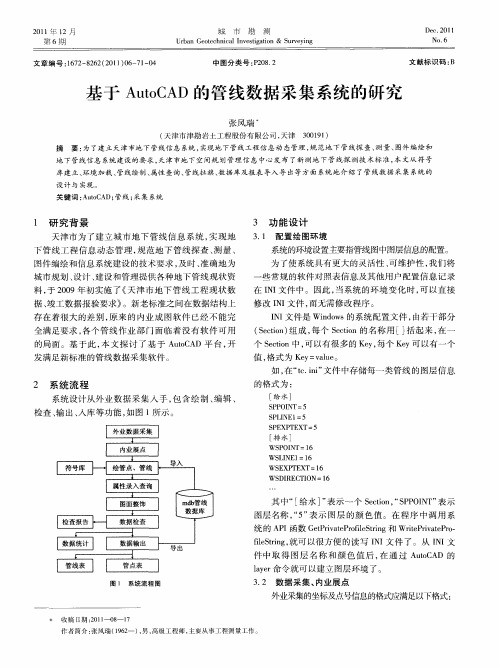
2 系统 流 程
系统设 计从 外 业 数 据采 集 人 手 , 含 绘 制 、 辑 、 包 编 检查 、 出、 输 入库 等 功能 , 图 1所示 。 如
中 图分 类 号 :2 8 2 P0 .
文 献 标 识 码 : B
基 于 A tC D的 管 线 数据 采 集 系统 的研 究 uo A
张凤瑞
( 津 市 津 勘 岩 土工 程 股 份 有 限公 司 , 津 天 天 30 9 ) 0 1 1
摘
要 : 了建立天津市地下管线信 息系统 , 为 实现地下管线工程信 息动 态管理 , 范地 下管 线探 查 、 规 测量 、 图件编 绘和
图 1 系 统 流 程 图
3 2 数 据采集 、 . 内业展 点
外业采集的坐标及点号信 息的格式应满足 以下格式 :
{ 收 稿 口期 :0 1 8 1 2 1—0 — 7
作 者简介 : 张风瑞( 9 2 ) 男 , 1 6 一 , 高级工程 师, 主要从事工程测量工作 。
7 2
图层 名称 ,5 表 示 图层 的颜 色 值 。在 程 序 中调 用 系 “”
研控科技 ESS86-P 系列 脉冲型集成式电机 用户手册说明书

目录前言 (1)1概述 (2)1.1产品介绍 (2)1.2特性 (2)1.3应用领域 (2)1.4 产品命名规则 (2)2性能指标 (3)2.1电气特性 (3)2.2使用环境 (3)3安装 (4)3.1安装尺寸 (4)3.2安装方法 (4)4端口与接线 (5)4.1接线示意图 (5)4.2端口定义 (6)4.2.1状态指示灯 (6)4.2.2电源端口 (6)4.2.3输入/输出端口 (6)4.2.4拨码开关 (6)4.3控制信号连接 (7)4.3.1输入信号 (7)4.3.2输出信号 (7)4.3.3输入信号波形时序图 (8)4.4拨码开关设定 (8)4.4.1电机旋转方向设定 (8)4.4.2细分设定 (8)5电机规格 (10)5.1技术规格 (10)6报警排除 (11)7版本修订历史 (12)8保修及售后服务 (13)8.1保修 (13)8.2售后服务 (13)前言感谢您使用本公司脉冲型集成式电机。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:注意:提醒您注意文字中的要点。
小心:表示错误的操作可能导致人身伤害和设备损坏。
本用户手册所述内容仅适用于以下机型:型号电机长度(mm)ESS86-P1x 65ESS86-P2x 80ESS86-P3x 971概述1.1产品介绍ESS86-P系列脉冲型集成电机采用新一代32位DSP控制技术和功角控制技术,最高转速可达3000rmp以上,且高速力矩衰减远低于普通开环驱动器,可大幅提升步进电机的高速性能和力矩使用率,有效降低电机发热和振动,从而提升机器的加工效率和精度。
组态操作说明
用户授权管理组态操作步骤用户授权管理组态的目的是确定DCS操作和维护管理人员并赋以相应的操作权限。
不同的用户管理对应不同的权限。
如,用户管理:工程师,对应的权限:退出系统、查找位号、PID参数设置、重载组态、报表打印、查看故障诊断信息等等。
在此,将创建一个特权级用户,用户名称为“系统维护”,用户密码为“SUPCONDCS”。
创建步骤如下:1.点击命令[开始/程序/AdvanTrol-Pro/用户权限管理],弹出图1所示对话框。
对话框中的“用户名称”为系统缺省用户名“SUPER_PRIVILEGE_001”。
图1登录对话框2.在“用户密码”中输入缺省密码“SUPER_PASSWORD_001”,点击“确定”,进入到用户授权管理界面,如图2所示。
图2用户授权管理界面3.在用户信息窗中,右键点击“用户管理”下的“特权”一栏,出现右键菜单如图3所示。
图3用户列表区内的右键菜单4.在右键菜单中点击“增加”命令,弹出用户设置对话框,如图4所示。
图4用户设置对话框5.在对话框中输入以下信息:用户等级:特权用户名称:系统维护输入密码:SUPCONDCS确认密码:SUPCONDCS点击对话框中的命令按钮“授权设置”,用户设置对话框将改变如图5所示。
图5用户授权设置6.在对话框中点击命令按钮“全增加”,将“所有授权项”下的内容全部添加到“当前用户授权”下,如图6所示。
(也可选中某一授权项,通过“增加”按钮授权给当前用户)图6授权结果7.点击“确定”退出用户设置对话框,返回到用户授权管理界面。
在用户信息窗的特权用户下新增了一名“系统维护”用户,如图7所示。
图7用户添加结果8.点击“保存”按钮,将新的用户设置保存到系统中。
9.可重复以上过程设置其它级别的用户,然后退出用户授权管理界面。
系统总体结构组态操作步骤系统总体结构组态是整个系统组态过程中最先做的工作,其目的是确定构成控制系统的网络节点数,即控制站和操作站节点的数量。
大气污染扩散的高斯烟羽模型及其GIS集成研究
[7]
2 ∏ [ dj ( x, y ) ] 2
n
k =1j= k
∑ ∏ [ dj ( x, y ) ]
3 系统实现 3. 1 系统平台
克里金插值法是常用的一种空间插值方法 。 它利用区域化变量的原始数据和变异函数的结构 特点 ,对未采样点的区域化变量的值进行线性无偏 最优估计 。它在分析已测样点的形状 、 大小 、 空间 位置 ,已测样点与待估样点的相互空间位置关系 , 以及变异函数提供的结构信息基础上 ,对待估样点
[ 10 - 11 ]
。
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
第 20 卷 第 5期
张斌才等 . 大气污染扩散的高斯烟羽模型及其 GIS集成研究
Q
(2 π) 3 / 2σxσyσz +e
e
σ2 - ( x - u t) 2 / 2 x
×
[e
σ2 - ( z - h - w t) 2 / 2 z
σ2 - ( z + 2H + h - w t) 2 / 2 z
]
( 1)
式中 : t— — — 时间 , s; Q — — — 污染释放率 , m g / s; u, v, σ σ σz — w— — — 风速矢量值 ; x 、 y 、 — — 水平和垂直方向 扩散 系 数 ; h — — — 事 故 点 高 度 , m; H — — — 混合层 高 , m。 烟羽模型以事故点为坐标原点 , 风向为 x 轴 , 得出空间一点 ( x, y, z)的污染物质量浓度值 C。当 v = w = 0, 且 z = 0 时 , 方程为 :
GPS RTK实时动态测量
GPS RTK实时动态测量实验报告姓名:**班级:2004一班专业:地理信息系统组号: 3 组郑州大学环境与水利学院2007年7月7日实验名称 GPS RTK实时动态测量实验一、实验概述本次实验是在原有传统控制测量的数据点上进行GPS RTK实时动态测量,选取的是郑州大学新校区环保馆前空地。
二、实验目的1.了解GPS RTK测量系统的组成,理解其基本原理;2.学会正确设置GPS RTK测量系统的基准站和流动站并在点位上进行实时动态测量;三、实验原理介绍GPS RTK实时动态测量技术的基本原理也即载波相位差分定位技术,主要介绍求差法即可。
要有数学公式。
GPS RTK实时动态测量技术其基本原理是采用了载波相位差分定位技术。
该定位技术具体而言又可分为两种方法,第一种方法,基准站实时将载波相位的改正量发送给用户站,以对流动站的载波相位进行改正实现定位。
该方法称之为改正法,另一种为求差法,这种方法则是将基准站的载波相位发送给流动站,在用户站对载波相位观测值求差,获得诸如静态相对定位的公式(1)、(2)、(3)的单差、双差、三差求解模型,并采用与静态相对定位类似的求解方程进行求解。
公式(1)单差观测方程:公式(2)双差观测方程:公式(3)三差观测方程:与静态相对定位不同的是,动态相对定位求解的是用户的位置,因此其定位的程序为:并由流动站将观测值求差进行坐标解算此处给出求差法的定位程序:(1)基准站站在保持不动的情况下,静态观测若干历元,并将基准站上的载波相位观测值通过数据链传送给流动站,在流动站对载波相位观测值求差,获得静态相对定位的单差、双差和三差模型,然后按照静态相对定位法求出整周未知数,这一过程称为初始化阶段。
(2)将求出的整周未知数代入双差模型,此时双差只包括ΔX、ΔY、ΔZ三个坐标位置分量,所以只要有4颗以上的卫星的一个历元的观测值,就可实时地求解出三个位置分量。
(3)将求出的坐标增量ΔX、ΔY、ΔZ加入已知的基准站的WGS-84地心坐标X k’、Y k’、Z k’即可得到流动站的地心坐标,即然后利用已经获得的坐标转换参数,将流动站的坐标转换到当地的空间直角坐标系中。
毕业设计__两种贯通方法误差预计程序设计
摘要现在市场上没有一款正式发布的软件明确支持地下贯通误差预计,并且实际工作中使用图解法或者Excel计算繁琐复杂,在特大型贯通中又有些力所不足。
基于此,本文主要使用C++语言,设计井下两种贯通方法(一井贯通和两井贯通)误差预计程序。
程序直接读取点数据文件和按约定原则的贯通信息数据文件(txt文本格式文件),计算贯通点在重要方向上的误差值,极大的减少处理数据和计算繁琐度。
并且改变了在增添或者删除加测陀螺定向边情况下就需要大规模重新计算的局面,使贯通测量设计提高效率。
整个使用的误差预计公式,为现在贯通误差预计中使用最久最成熟的导线法误差预计公式。
程序主要由两个大类,一是支导线误差预计类,二是加测陀螺定向边的方向附合导线误差预计类组成。
通过main主函数的调用,简单组合,实现程序最大的灵活性。
而每个类由主要的五个成员函数构成,使程序简明。
最后以文本格式输出贯通误差预计详细结果和预计处理过程的相关数据。
不仅对实际误差预计工作有现实意思,也为编制测量程序积累了经验。
关键字:导线法贯通误差预计程序AbstractNowadays,We can’t find a software tha t released officially supporting estimation of through error underground in the surveying and mapping market.Besides,using graphical method or Excel to calculate during the practical work is complicated.It’s inefficient in the large-scale break through survey.Therefore,this article will design program to solve error prediction of two back through ways(single shaft orientation and two shaft orientation).The program can directly read data files andbreak through information data files (.txt) according to the contract.It can calculate the error value of holing point on the important direction which greatly simplify the process. It also change the situation where need to a large scale recalculate in the case of adding or deleting gyroscopic directed edges which can improve efficiency in through survey.The error prediction formula the program use is the most longer and mature formula in break through error prediction.The program concludetwo parts: error prediction of branch conductor and direction-connecting traverse which has gyroscopic directed edges.By calling mainfunction,simply combining,the program achieve great flexibility.Each class has five member function makes the program simple andclear.Finally it can output the result and related data of error prediction process.This article is not only meaningful to the actual work,but also a useful experience for measurement program writing.Keywords: Wire ; error prediction ; through ; software目录1.绪论 11.1研究的背景及意义 11.2国内外研究现状 21.3研究的内容与方法 42.贯通误差预计公式 62.1支导线误差公式 62.2方向附合导线误差公式 92.3导线最远点高程中误差的误差预计公式 12 3.贯通误差预计程序总体设计 133.1数据格式设计 133.2贯通情况讨论与程序灵活性设计 173.3预计过程可视性设计 244.程序详细设计 274.1读入数据类设计 274.2支导线误差预计类设计 314.3加测陀螺定向边误差预计类设计 364.4 main主函数体现程序灵活简单特性 39 5.程序在实际案例中应用 415.1 某煤矿开采面最弱点误差预计 415.2某煤矿两井贯通误差预计 456.结论与展望 47参考文献 50致谢 52附录 531. 绪论1.1研究背景及意义随着国际隧道协会(IAT)提出“大力发展地下空间,开始人类新的穴居时代“的倡议和中国国家发展改革委、外交部、商务部2015年3月28日联合发布了《推动共建丝绸之路经济带和21世纪海上丝绸之路的愿景与行动》。
配电网自动化知识点总结
第一章概述1.名词解释1)配电系统:配电区域内的配电线及配电设施的总称。
它由变电站、配电站、配电变压器及二次变电站以下各级线路、发电厂直配线路和进户线及用电设备组成。
2)配电系统自动化:(DSA)“是利用现代电子、计算机、通信及网络技术,将配电网在线数据和离线数据等配电网数据和用户数据、电网结构和地理图形进行信息集成,构成完整的自动化系统,实现配电网及其设备正常运行及事故状态下的监测、保护、控制、用电和配电管理的现代化。
”3)SCADA:(SCADA系统)即数据采集与监视控制系统。
是以计算机为基础的生产过程控制与调度自动化系统。
它可以对现场的运行设备进行监视和控制,以实现数据采集、设备控制、测量、参数调节以及各类信号报警等各项功能。
4)SA(变电站自动化):包括配电所、开关站自动化。
它是利用现代计算机技术、通信技术将变电站的二次设备(包括测量仪表、信号系统、继电保护、自动装置和远动装置等)经过功能组合和优化设计,利用先进的计算机技术、现代电子技术、通信技术和信号处理技术,实现对全变电站的主要设备和输、配电线路的自动监视、测量、自动控制和微机保护,以及与调度通信等综合性的自动化功能。
5)FA(馈线自动化):包括故障自动隔离和恢复供电系统,馈线数据检测和电压、无功控制系统.主要是在正常情况下,远方实时监测馈线分段开关与联络开关的状态及馈线电流、电压情况,并实现线路开关的远方分合闸操作;在线路故障时,能自动的记录故障信息、自动判别和隔离馈线故障区段以及恢复对未故障区段的供电.6)DMS(配电管理系统):就是利用当前先进的计算机监控、网络通信、数据处理技术对配电的运行工况进行监视、控制,并对其设备、图纸和日常工作实现离线、在线管理,提高配电运行的可靠性和故障自动分段、故障快速处理.包括配电网SCADA、配电网的负荷管理功能(LM)和一些配电网分析软件(DPAS),如网络拓扑、潮流、短路电流计算、电压/无功控制、负荷预报、投诉电话处理、变压器设备管理等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实 验 报 告 课程名称 计算机图形学 实验名称 小型绘图系统 姓 名 学 号 专业班级 实验日期 2011 年 12 月 26 日 成绩 指导教师 爨莹
一、实验目的 1.熟悉计算机图形的生成算法 2.用编程的方法实现计算机的生成算法 3.巩固计算机图形学中学到的一些理论知识
二、实验环境
软件:windows7 系统 三、实验内容与步骤(可提供屏幕抓图) 1)绘制直线 (1)DDA
算法的原理 DDA算法是根据直线的微分方程来计算Δx或Δy生成直线的扫描转换算法。 在一个坐标轴上以单位间隔对线段取样, 以决定另一个坐标轴方向上最靠近理想线段的整数值。
设(x0, y0)为直线段的始点, (x1, y1)为直线段的终点, 且端点坐标均为整数, 则直线的微分方程为
设|k|≤1, 则有 yi+1=kxi+1+b=k(xi+Δx)+b=yi+kΔx 上式表明, 若Δx=1, 则当x每递增1时, y递增k。 扫描转换开始时, 取直线始点(x0, y0)作为初始坐标。 程序代码: void DDA-line(x0, y0, x1, y1, color) int x0, y0, x1, y1, color; {int x; float y, k, deltx, delty; deltx=x1-x0;
kxyxxyy
0101 delty=y1-y0; k=delty/deltx; y=y0; for(x=x0; x<=x1; x++) { putpixel(x, int(y+0.5), clolor); y=y+k; }
实现截图
DDA算法绘制直线
(2)中点法
算法的原理
为了讨论的方便, 假定直线的斜率在0~1之间, 其它情况参照下述讨论进行处理。 假设直线的起点和终点分别为(x0, y0)和(x1, y1), 则直线方程为 F(x, y)=ax+by+c=0 其中, a=y0-y1, b=x1-x0, c=x0y1-x1y0。 对于直线上的点, F(x,y)=0; 对于直线上方的点, F(x,y)>0; 而对于直线下方的点, F(x,y)<0。 如图3.1所示, 若直线在x方向上增加一个单位, 则在y方 向上的增量只能在0和1之间。 假设横坐标为xP的各像素点中最佳逼近于理想直线的像素为(xP,yP), 用实心小圆表示。 那么, 下一个与直线最近的像素只能是正右方的P1(xP+1,yP)或右上方的P2(xP+1, yP+1)两者之一, 用空心小圆表示。 我们用P1和P2的中
点M(xP+1, yP+0.5)与理想直线的位置关系来判定。
中点画线示意图 程序 void MidPoint-Line(x0, y0, x1, y1, color) int x0, y0, x1, y1, color; { int a, b, delta1, delta2, d, x, y; a=y0-y1; b=x1-x0; d=2*a+b delta1=2*a; x=x0; y=y0; putpixel(x, y, color); while(x { if(d<0) { x++; y++; d+=delta2; } else { x++; d+=delta1; } putpixel(x, y, color); } } }
实现截图
(3)Bresenham算法 算法的原理 Bresenham画线算法与中点画线法有相似之处, 也是通过在每列像素中确定与理想直线最近的像素来进行直线的扫描转换的。 为了讨论的方便,不妨也假定直线的斜率在0~1之间。 如图所示, 过各行、 各列像素中心构造一组虚拟网格线, 按直线从起点到终点的顺序计算直线与各垂直网格线的交点, 然后确定该列像素中与该交点最近的像素。
Bresenham算法误差项d的几何意义 程序 class drawings implements Serializable//父类,基本图形单元,用到串行化接口,保存时所用 { int x1, y1, x2, y2; //定义坐标属性 int R, G, B; //定义色彩属性 float stroke; //定义线条粗细属性 int type; //定义字体属性 String s1; String s2; //定义字体风格属性
void draw(Graphics2D g2d) { } ;//定义绘图函数 } public void BresenhamLine(Graphics g,int x1,int y1,int x2,int y2) throws Exception{ int x,y,dx,dy,e; dx=x2-x1; dy=y2-y1; e=-dx; x=x1; y=y1; while(x<=x2){ g.setColor(Color.red); pset(g,x,y); x++; e=e+2*dy; if(e>0){ y++; e=e-2*dx; } } class Line extends drawings //直线类 { void draw(Graphics2D g2d) { g2d.setPaint(new Color(R, G, B)); g2d.setStroke(new BasicStroke(stroke, BasicStroke.CAP_ROUND, BasicStroke.JOIN_BEVEL)); g2d. BresenhamLine (g2d ,x1,y1,x2,y2); } } 实现截图
2)圆 算法的原理 为了讨论的方便, 我们考虑中心在原点, 半径为R的圆的第二个八分圆弧, 圆的其它部分可通过一系列的简单的反射变换得到。 也就是讨论如何从(0, R)到 (R / ,R/ )顺时针确定最佳逼近于该圆弧的像素序列。 中心在原点, 半径为R的圆的方程为 x2+y2=R2 若令F(x,y)=x2+y2-R2, 则上述方程为 F(x, y)=0
如图所示, 假定x坐标为xP的像素中最佳逼近理想圆弧的为P(xP, yP), 那么, 下一个像素只能是正右方的P1(xP+1, yP)或右下
方的P2(xP+1, yP-1)两者之一。 引入P1和P2的中点M(xP+1, yP-0.5), 当M在圆内时, 应取P1(xP+1, yP)为下一个像素, 否则, 应取P2(xP+1, yP-1)为下一个像素。 为此, 构造判别式
d=F(M)=F(xP+1, yP-0.5)=(xP+1)2+(yP-0.5)2-R2
中点画圆法
若d<0, 则应取P1(xP+1, yP)为下一个像素, 而且再下一个像素的判别
式为 d′=F(xP+2, yP-0.5)=(xP+2)2+(yP-0.5)2-R2 =d+2xP+3 而d≥0, 则应取P2(xP+1, yP-1)为下一个像素, 而且再下一个像素的判别式为
22 d′=F(xP+2, yP-1.5)=(xP+2)2+(yP-1.5)2-R2 =d+2(xP-yP)+5 由于第一个像素是(0,R), 因而d的初始值为 d0=F(1, R-0.5)=1.25-R
程序
void Bresenham-Circle(r, color) Int r, color; { int x, y, delta, delta1, delta2, direction; x=0; y=r; delta=2*(1-r); while(y>=0) { putpixel(x, y, color); if(delta<0) { delta1=2*(delta+y)-1; if(delta1<=0) diretion=1; else direction=2; } else if(delta>0) { delta2=2*(delta-x)-1; if(delta2<=0) direction=2; else direcion=3; } else direction=2; switch(direction) { case 1:x++; delta+=2*x+1; break; case 2: x++; y--; delta+=2*(x-y+1) break; case 3: y--; delta+=(-2*y+1); break; } } } 程序截图