VisionPro连接线扫相机使用说明
扫描仪操作步骤说明书
扫描仪操作步骤说明书操作扫描仪时,请按照以下步骤进行操作。
本说明书将详细介绍如何正确地使用扫描仪,并确保您能够顺利进行扫描操作。
请仔细阅读以下内容。
1. 检查设备连接在开始使用扫描仪之前,请确保设备已正确连接到您的电脑或其他设备上。
检查电源线和数据线是否牢固连接,并确保所连接的设备已打开和正常工作。
2. 打开扫描软件在您的电脑上打开扫描软件。
通常情况下,您可以在操作系统的"开始菜单"或"应用程序"文件夹中找到扫描软件的图标。
双击该图标,等待软件加载完毕。
3. 准备扫描文件将需要扫描的文件放置在扫描仪的进纸托盘上。
请确保文件摆放整齐,并且没有折叠、撕裂或损坏的部分。
关闭进纸托盘,确保文件可以顺利进入扫描仪。
4. 设置扫描参数在扫描软件的界面上,点击"设置"或"选项"按钮,进入扫描参数设置页面。
根据您的需求,选择扫描的颜色模式(黑白、灰度或彩色)、分辨率、文件格式等参数。
请注意,不同的设置选项可能对扫描速度和文件大小产生影响。
5. 开始扫描确认扫描参数设置完成后,点击"扫描"或"开始扫描"按钮,开始进行扫描操作。
扫描仪将会自动将文件从进纸托盘上依次送入进行扫描,并将扫描结果保存至您指定的位置。
6. 预览和编辑扫描文件(可选)某些扫描软件支持预览和编辑扫描文件的功能。
在扫描完成后,您可以在软件界面上查看扫描结果,并进行一些基本的编辑操作,如裁剪、旋转、亮度调节等。
根据需要,您可以选择是否进行这些操作。
7. 保存扫描文件在完成扫描和编辑之后,点击"保存"或"存储"按钮,将扫描文件保存至您的电脑或其他设备上。
请选择合适的文件名和保存位置,并选择您想要的文件格式(如PDF、JPEG等)。
8. 完成操作在保存扫描文件后,您可以选择继续扫描其他文件,或者关闭扫描软件。
康耐视 VisionPro 内部培训手册 中文版 02

y
1
像源
• 首先,选择图像是 来源于图像数据库 还是相机 • 您也可以加载一个 图像文件或文件夹
1
像源
• 板卡
– 采集图像的康耐视电路板
• 视频格式:
– 选择您要用来采集该图像的相机(及其格式)
• 相机端口
–工作时,它从相 机采集图像并放入到 LastRun.OutputImage
• 勾选则触发信号从低到高地 转变 • 不勾选则从高到低地转变
– 如果取回图像的速率低于触 发的速率,可能会发生超运 行错误
1
频闪和触发
• 硬件半自动
– 当您执行运行时,AcqFifo 工具激活板卡,然后等待 外部的触发 – 要采集另一个图像,再次 执行运行;否则,可能会 丢失下一个外部触发
1
像源设置
图像采集和柱状图
学习目标
• 学员将学会正确地:
创建并配置像源采集 利用柱状图工具分析图像上是否存在某元件 利用终端传送工具间的数据
保存并且加载VisionPro项目到QuickBuild中
1
像源
• 在VisionPro中用来从 相机采集图像的工具 是 像源 • 使用初始化按钮初始 化采集
– 添加当前输入图像 (Current.InputImage)到图像文件中 – 取出当前输入图像并将其放入上次运 行输出图像(LastRun.OutputImage)
1
Current.InputImage
• Current.InputImage 是要写 入到下一次以录制模式运 行的图像文件中的图像
1
读取图像
• 例子:您需要在固定的 一套已保存图像上构建 原型并且测试视觉工具 • 使用OpenImageFile 按钮 加载一个文件
VisionPro功能介绍03_1_PMAlign-CN

预期匹配 偶然的匹配
1
弹性
• 弹性 是一个高级参 数,在查找与原来 的受训图案存在一 些几何形状变化的 元件时很有用途
显示高级参数
1
弹性
弹性,是一个运行期间参数,用来指
定您允许PatMax 忍受非线性几何形 状变化的程度
弹性以像素为单位进行测量,通常为0 到8 在您提高弹性时,PatMax 可能找到 非预期的匹配- 精确降低
1
图案区域和原点
• 在使用图形时
– 拖动并调整图案周围训 练框的大小 – 在适当的位置上定位原 点
1
图案区域和原点
• 下一步,定义包含要 训练的图案的像素区 域和图案原点
– 使用图形或者在训练 区域和原点标签中输 入值
1
模型原点
• 在PatMax定位搜索场景中模型的实例时,模型原 点 可以辨别要向您报告的点 • 要维持最高的精确度,原点必须放置图案区域的中 心
1
精度限制
• PatMax 使用精细和粗糙限制之间的精度范围 • 使得粒度更粗糙(更高):
– 提高速度 – 降低精确度 – 探测粗糙并且减弱精细特征(可能是好的也可能是坏的)
• 使得粒度更精细(更低):
– 降低速度 – 提高线性精确度 – 探测精细并且减弱粗糙特征 (可能是好的也可能是坏的)
1
人工建模
1
如何使得PatMax 更快
• 控制您能控制的并且告诉PatMax 您所知道的元件 • 了解哪些参数影响执行时间
1
参数和执行时间
• 搜索 “体积”越大,执行时间可能越长 – (宽) × (高) × (角度区域) × (刻度区域) • 减小接受阀值强迫更多的探索 • 加大所要求的结果的数量使得执行时间稍长 • 减小精细粒度限制增加时间(更高细节要解析) • 提高粗糙粒度限制减少时间(但是确保探测到必要的特征) • 考虑极性 稍微提高速度 • 设置对比阀值 > 0.0,便于更快地执行
康耐视视觉软件说明书

Now you can get the world’s top vision software—no matter which camera, frame grabber, or direct-connect digital standard you use.Support for all image capture needsBroad Camera SupportVisionPro captures images from hundreds of industrial cameras, covering the complete range of video formats and acquisition requirements. Strategic Cognex relationships with major camera suppliers enable early support of new cameras and technology. VisionPro provides open camera support, as well as configuration and diagnostic tools. This enables customers to configure, analyze, and modify cameras for numerous acquisition platforms.Acquisition IndependenceVisionPro software provides pre-configured, tightly integrated acquisition from both Cognex hardware and direct-connect digital cameras. For images from any other source, such as microscopes or 3rd-party frame grabbers, VisionPro provides a flexible acquisition architecture. This allows customers and vision partners to develop custom interfaces for any programmable image source.Direct-Connect TechnologyGigE Vision ® acquisition provide a broad range of digital cameras with attractive features and high performance. Direct-connect technology takes advantage of the latest PC architectures to provide reliable image acquisition without a traditional frame grabber.Frame GrabberBoth Camera Link ® and analog frame grabbers can be used with VisionPro. This provides fail-safe image capture with image buffers, advanced error detection, and dedicated multi-channel hardware.Acquisition AllianceCognex maintains strategic relationships with major camera suppliers through our Acquisition Alliance program. Through the Acquisition Alliance, Cognex establishes cooperative sales and marketing efforts and strong technical relationships, leading to rapid integration of new cameras with VisionPro. Cognex supports hundreds of industrial cameras and videoformats covering the complete range of acquisition requirements typically used in machine vision.TOTAL HARDWARE INDEPENDENCENotes:*1 Cognex Designer is only available with the Development dongle, VC5, CC24 Comm Card, or 8704E GigE Framegrabber*2 3D Measurements Tools are exclusive to the Cognex Displacement Sensor series。
VisionPro图标工具说明

项次分类名称功能(保护密码:123)1无分类 CogAcqFifoTool从相机获取图像2 CogBlobTool斑点找寻工具3 CogCaliperTool卡尺工具,用于找单边或边缘对4 CogCNLSearchTool在图像中找寻像素值的训练模板5 CogDataAnalysisTool数据分析工具6 CogImageFileTool将获得的图像保存至文件或从文件中获取图像7 CogPatInspectTool比较输入图像的特征和训练模板的特征并产生高亮差异图8 CogPMAlignTool模板匹配工具(模型定位)9 CogResultsAnalysisTool结果分析工具10 CogSearchMaxTool模板搜寻工具11 CogToolBlock将多个工具组合在一起完成某个功能,接口简单且可重用12 CogToolGroup将多个工具组合成一个逻辑集合13Calibration & Fixturing CogCalibCheckerboardTool校正工具,使返回的值更具实际意义14 CogCalibNPointToNPointTool标定工具15 CogFixtureNPointToNPointTool将程序坐标空间定位至图像内容空间16 CogFixtureTool定位工具17Color CogColorExtractorTool从彩色图像中抽取像素来创建灰度图像18 CogColorMatchTool检查某一块区域的色彩19 CogColorSegmenterTool从彩色图像中分离像素20 CogCompositeColorMatch从彩色图像中检查颜色容量21Geometry - Creation CogCreateCircleTool创建圆22 CogCreateEllipseTool创建椭圆23 CogCreateLineBisectPointsTool创建两点的平分线24 CogCreateLineParallelTool在某一点创建某条线的平行线25 CogCreateLinePerpendicularTool在某一点创建某条线的垂线26 CogCreateLineTool根据指定点和角度创建一条直线27 CogCreateSegmentAvgSegsTool创建两条线段的平均线28 CogCreateSegmentTool创建线段29Geometry - Finding & Fitting CogFindCircleTool找圆工具30 CogFindLineTool找线工具31 CogFitCircleTool拟合圆32 CogFitEllipseTool拟合椭圆33 CogFitLineTool拟合直线34Geometry - Intersection CogIntersectCircleCircleTool检测两圆是否相交35 CogIntersectLineCircleTool检测线与圆是否相交36 CogIntersectLineEllipseTool检测线与椭圆是否相交37 CogIntersectLineLineTool检测线线是否相交38 CogIntersectSegmentCircleTool检测线段与圆是否相交39 CogIntersectSegmentEllipseTool检测线段与椭圆是否相交40 CogIntersectSegmentLineTool检测线段与直线是否相交41 CogIntersectSegmentSegmentTool检测线段与线段是否相交42Geometry - Measurement CogAngleLineLineTool两条直线的夹角43 CogAnglePointPointTool由两点组成的线段的角度44 CogDistanceCircleCircleTool两圆的最短距离45 CogDistanceLineCircleTool线到圆的最短距离46 CogDistanceLineEllipseTool线到椭圆的最短距离47 CogDistancePointCircleTool点到圆的最短距离48 CogDistancePointEllipseTool点到椭圆的最短距离49 CogDistancePointLineTool点到直线的最短距离50 CogDistancePointPointTool点到点的距离51 CogDistancePointSegmentTool点到线段的最短距离52 CogDistanceSegmentCircleTool线段到圆的最短距离53 CogDistanceSegmentEllipseTool线段到椭圆的最短距离54 CogDistanceSegmentLineTool线段到线的最短距离55 CogDistanceSegmentSegmentTool线段到线段的最短距离56ID & Verification Cog2DSymbolTool2维解码工具57 Cog2DSymbolVerifyTool2维解码验证工具58 CogBarcodeTool定位并解码工具59 CogOCVMaxTool确定字符串是否包含预期的字符60 CogOCVTool确定字符串、logo等是否存在于图像中61 CogPDF417Tool用于解码PDF417符号62Image Processing CogAffineTransformTool通过仿射变换产生新的图像63 CogCopyRegionTool复制输入图像的一部分到输出图像64 CogHistogramTool对图像中的像素值进行统计测量65 CogImageAverageTool积累同一场景的不同图像并产生一个平均图像66 CogImageConvertTool将图像从一种格式转换为另一种格式67 CogImageSharpnessTool用来判断图像的锐利度68 CogIPOneImageTool执行基本图像处理操作69 CogIPTwoImageAddTool由两个输入图像产生一个输出图像70 CogIPTwoImageMinMaxTool结合两个图像的像素最小值或最大值71 CogIPTwoImageSubtractTool两幅图像相减得到输出图像72 CogLinescanDistortionCorrectionTool从线扫相机获得图像73 CogPixelMapTool定义输入图像与输出图像之间的映射74 CogPolarUnwrapTool将输出图像部分转换为输出图像75 CogSobelEdgeTool用于分离或增强边界信息。
扫描仪的使用方法
扫描仪的使用方法使用扫描仪的方法可以大致分为以下几个步骤:1.准备工作a.确认扫描仪的连接:将扫描仪与电脑连接。
通常有两种连接方式:USB连接或者Wi-Fi连接。
如果是USB连接,则需要将一端插入扫描仪的USB接口,另一端插入电脑的USB接口。
如果是Wi-Fi连接,则需要在扫描仪和电脑上同时设置并连接同一个Wi-Fi网络。
c.检查扫描仪的电源:确保扫描仪的电源已经连接,且扫描仪已经打开。
有些扫描仪在正常使用前可能需要先热身,所以需要等待一段时间。
2.设置扫描参数a.打开扫描软件:启动电脑上与扫描仪相关的软件。
b.选择扫描类型:根据需要选择扫描文档的类型,比如文本、图片、彩色或者黑白。
c.调整分辨率:可以根据需要调整扫描文档的分辨率。
较高的分辨率可以获得更清晰的扫描效果,但同时会增加文件的大小。
d.设置色彩模式:如果扫描的是彩色文档或者照片,可以选择彩色模式,否则可以选择黑白模式以减小文件的大小。
e.裁剪或旋转图像(可选):如果需要对扫描的图像进行裁剪或者旋转,可以在软件中进行相应的设置。
f.预览图像:在扫描之前,可以进行一次预览,以确保设置的参数符合预期。
3.进行扫描a.放置文档:将待扫描的文档放在扫描仪的扫描板上,确保文档与扫描仪平整对齐。
b.开始扫描:点击软件中的“开始扫描”按钮或者类似的操作,开始进行扫描操作。
c.等待扫描完成:扫描的速度因扫描仪的型号和参数而异。
一般来说,较高分辨率和彩色模式下的扫描需要更长的时间。
4.保存和处理扫描结果a.保存文件:扫描完成后,软件会要求选择保存文件的名称和路径。
根据需求选择文件格式(如PDF或JPG)并保存。
b. 图像处理(可选):扫描后的图像可以进行一些基本的处理操作,如裁剪、旋转、调整亮度和对比度等,以获得更好的效果。
使用专业的图像处理软件,如Adobe Photoshop等,可以进行更加复杂的图像处理。
以上是使用扫描仪的基本步骤,下面介绍一些常见问题和解决方法:1.扫描结果不清晰:可以尝试调整分辨率或者选择高质量的扫描模式。
相机连接说明书
如果有 windows安 全警报或杀 毒软件报警, 请选择允许 安装
之后一直默认安装即可。。。。。
之后一直默认安装即可,连续出现的几个NEXT,点 击即可,直到下图驱动安装完成。。。。。
之后一直默认安装即可。。。。。
安装加密狗驱动
打开下面的文件夹
安装加密狗驱动
安装加密狗驱动
安装加密狗驱动
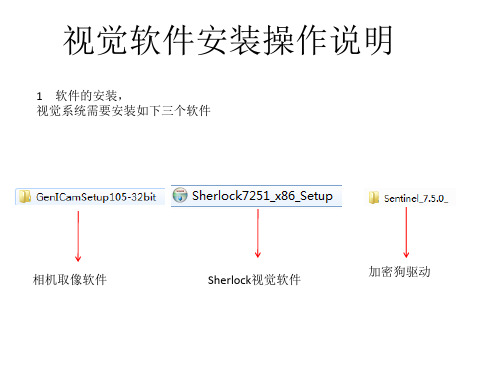
视觉软件安装操作说明
1 软件的安装, 视觉系统需要安装如下三个软件
相机取像软件
Sherlock视觉软件
加密狗驱动
硬件配置
1.相机、镜头、光源 2.相机配套电源线一根 3.配套网线一根 4加密狗驱动一个 5.工控机一台(32位操作系统)
软件安装
打开此文件夹,选择主安装程序右键选择以管改软件及相机配 置文件生成
相机IP地址的修改和配置文件的生成
相机IP地址的修改和配置文件的生成
点击,会在文件夹
发现一个文件名为gevtest的文本文件
相机IP地址的修改和配置文件的生成
确认此序列号为已连 接的相机的序列号 可以把此文件拷贝到D:\DALSA文件夹下,也可以是别的路径,但需要记住此 路径,之后Sherlock需要调用此文件
Sherlock软件调用相机配置文件 把此项内容设定为1,然后保存
Sherlock正确取像的确认 1 把软件的授权狗,插到电脑上,在开始程序,找到如下 位置
打开
Sherlock正确取像的确认
此两项为绿色表明加密狗的驱动安 装正确
Sherlock正确取像的确认 在打开的sherlock软件里,找到Options----Application
安装加密狗驱动
安装加密狗驱动
安装Sherlock程序
维扫描仪使用教程
三维扫描仪使用教程
1、先根据要扫描的产品确定好合适的高度,将仪器至于垂直位置。
2、打开软件,初始化,开灯调节亮度、焦距至合适,然后调节固定镜头的各螺丝使视窗口中的十字线移至方框中。
3、将标定板放在仪器下面,让板要标定的范围在两个视窗口都能完整显示。
然后关灯,调节亮度,调节焦距至最清晰,锁住焦距调节圈。
4、将标定板通电,点击软件上的相机图标开始标定,在四个方向给标定板不同的角度各拍两次,期间标定范围要始终处于两视窗口内。
完成后加载图像,输入行列数边长,就可以标定了。
(黑白十字交叉算一列)
5、在扫描过程中可以整体移动相机,但不能移动来那个镜头的相对位置和焦距。
移动产品或扫描仪使两视窗口中十字线位于小方框内,点软件上方十字线图标,用发光源上的调节按钮使大十字线清晰,然后关掉十字线,开始扫描,扫描下一幅图像时要有标志点变红才可扫描。
6、扫描完成后要先保存工程文件,再点剪刀图标清除重复部分,然后再导出点云文件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VisionPro使用Dalsa线扫相机使用说明
1 环境配置
硬件:编码器(提供编码信号的PLC) 线扫相机镜头相机线缆图像采集卡
(Dalsa_Xcelera-CL_PX4 Dual)
软件:VisionPro VisionPro软件
SaperaLT750CamExpertSetup 线扫相机配置软件
TDalsa_Xcelera-CL_PX4_Driver 采集卡驱动
Teledyne Dalsa Sapera LT Cognex Adapter Dalsa相机与Cognex适配器
2 软件使用说明
按照“环境配置”中的软件顺序依次安装,接下来就是一些软件使用配置
①第一步:CameraExpert相机专家
图1 CameraExpert主界面
相机专家由四个区域组成,设备选择、参数配置、图像显示、信息输出;线扫配置主要用到设备选择和参数配置。
设备选择:
线扫相机连接采集卡1#端口,设备选择Xcelera-CL_PX4_1 CameraLink Base Mono #1
图2 设备选择
参数配置:基本设置Basic Timing
根据相机参数输入水平像素数,时钟频率等信号。
(以下为S2-2K40相机参数)
l 相机类型分为线扫描与面扫描,色彩类型分为彩色与黑白。
像素深度(Pixel Depth)与相机数字输出相关,S2相机支持8bits或10bits输出,可通过超级终端设置。
当选择8 bits数据时,Sapera内存类型为8 bits,选择10bits时,Sapera 内存为
16bits。
l Data Valid:一些CameraLink 相机会在行有效或者帧有效信号中加入数字有效信号。
S2相机没有这个信号,所以选择disable
l Camera Sensor Geometry是指相机的数据输出格式,如单通道输出,双通道奇偶输
出,双通道左右输出等等。
根据相机数据的不同输出格式,采集卡可以对数据进行重组,以输出完整的一幅图像。
S2相机的输出方式由其说明书可知为一个通道,如下图
图3 参数配置1
高级控制:配置相机触发方式
None:None
Internal Line Trigger:内部触发信号
采集卡按照固定的频率发出行信号
External Line Trigger:外部触发信号
一般触发信号为TTL时选用此项
Shaft Encoder Trigger:编码器触发
表示采集卡接收到编码器信号,然后向相机发出行信号
现在用编码器做为触发信号
CC(Camera Control)定义为采集卡控制相机的端口。
Camera Link接口中总共有四个端口控制相机。
CC可以定义为High(一直为高电平),Low(一直为低电平),Pulse #0(即在Camera control method选项中选择的Pulse输出信号),Pulse #1(同Pluse #0,用于需要输出两个脉冲的情况),TDI Linescan Direction(用于TDI 线扫描相机的扫描方向控制)
图4 参数配置2
外部触发:设置外部触发信号启用/禁用
External Trigger Detection:用来设置采集卡检测信号的格式,主要有Active Low (输入信号为低电平时,采集卡接收到信号),Active High(输入信号为高电平时,
采集卡接收到信号),Rising Edge(输入信号从低电平变为高电平时,上升沿,采集卡接收到一个信号),Falling Edge(输入信号由高电平变为低电平时,下降沿,采集卡接收到一个信号)。
Dual-Input Trigger Rising Edge 与Dual-
Input Trigger Falling Edge分别对应双输入的上升沿、下降沿触发信号),Rising Edge(输入信号从低电平变为高电平时,上升沿,采集卡接收到一个信号),Falling Edge(输入信号由高电平变为低电平时,下降沿,采集卡接收到一个信号)。
Dual-Input Trigger Rising Edge 与Dual-Input Trigger Falling Edge 分别对应双输入的上升沿、下降沿触发
图5 参数配置3
图像缓冲器 & ROI:
A.固定长度
这种情况下,X64采集卡接收到外触发帧信号(6、19或7、20)后,开始往内存里存储数据。
采集速度与行同步信号一致。
当内存存满以后,系统暂停采集,等待下一个帧
触发信号,再重新采集一帧新的图像
B.可变长度
在这种情况下,采集卡需要接收两个帧触发信号。
当第一个信号到达时,采集卡开始往内存采集图像,采集速度与行同步信号一致,当第二个信号到达时,停止采集,并返回一帧图片。
如果在第二个信号到达之前,内存已经存满,则自动返回一帧图片,同时忽略第二个信号,等待下一个触发信号重新触发采集
图6 参数配置4
②VisionPro配置
添加Job的脚本初始化配置,图中红色框内为添加的脚本;红色脚本为Dalsa CameraExpert保存的线扫相机配置文件路径。