自适应Chirplet信号分解用于ISAR目标三维转动检测
稀疏孔径和大转角下ISAR对目标转动的估计

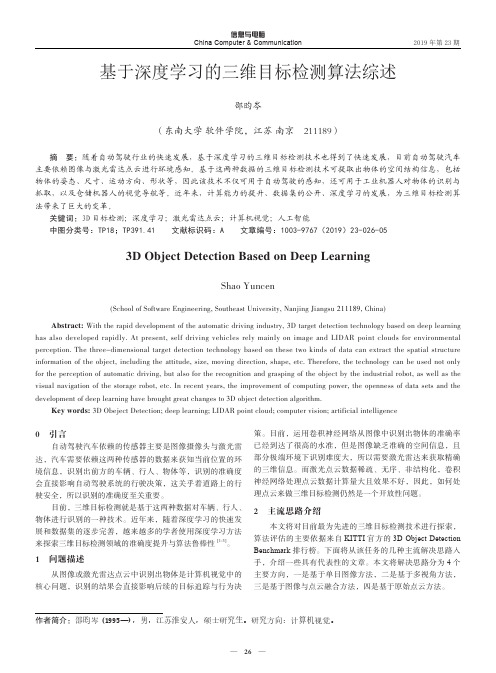
稀疏孔径和大转角下ISAR对目标转动的估计陈杭;杨健;叶春茂【摘要】逆合成孔径雷达(inverse synthetic aperture radar,ISAR)对非合作目标做成像时图像质量依赖于对目标运动参数的准确估计.针对在稀疏孔径和非均匀转动条件下现存的参数估计方法计算量过大或者方法适用条件不满足,提出了一种基于神经网络的参数估计方法.此方法以成像问题的模型知识指导数据的生成过程,然后训练通用的神经网络,最终实现将数据中隐含的知识转化为转动估计器.从仿真实验结果来看,所得到的网络对满足一定信噪比要求的回波数据可以提供较准确的估计,所得参数可以帮助成像算法提高聚焦效果,大量的样例表明网络可以部分学习到回波与转动之间的关系.%The success of inverse synthetic aperture radar (ISAR) imaging for non-cooperative target depends on accurate estimation of relative motion parameter, especially the rotation parameters. In sparse aperture and larger rotation angle configuration, the existing methods suffer too much computation or applicable condition violation. In this paper, a neural network based method is proposed to estimate the rotation parameters and it transforms the expertise hidden in the echo data generated based on the expert knowledge to the final estimator via the training process. The experimental results that the net can provide accurate estimation for echo data with appropriate SNR and the estimated parameters can help to improve the focus of imaging algorithm. Lots of examples have illustrated that the network can recognize the essential relation between the echo and the rotation motion partially.【期刊名称】《电波科学学报》【年(卷),期】2019(034)001【总页数】6页(P70-75)【关键词】逆合成孔径雷达;卷积神经网络;高分辨距离像;转角估计;卷积反投影【作者】陈杭;杨健;叶春茂【作者单位】清华大学电子工程系, 北京 100084;清华大学电子工程系, 北京100084;北京无线电测量研究所, 北京 100854【正文语种】中文【中图分类】TN951引言逆合成孔径雷达(inverse synthetic aperture radar, ISAR)是一种能够对非合作目标进行高分辨二维成像的微波雷达[1],目前已经广泛地用在空间目标监视、空天目标军事侦察[2]、海洋目标检测与识别等领域中,由于应用广泛和目标非合作性所带来的困难,目前ISAR研究依然受到业界的重视.近年以来,ISAR成像技术出现了很大进展,其中最重要的是在稀疏信号处理框架下对较大转角范围、稀疏孔径和目标有一定机动的情景下的成像算法.这些算法将成像问题在数学上转化为逆问题,并采用优化目标函数的方法求解,在求解过程中为了增加问题的适定性添加合适的正则化项作为先验信息(通常是某种稀疏性).当实际问题符合模型和先验假设前提下,此类方法能够提供高质量的ISAR图像[3-4].但是这些方法能够适用的前提依然是较精确的平动补偿和转角估计.在一些研究中[5-6],转角估计问题和成像过程可以相互解耦,前者只是涉及到ISAR图像的标定问题,因此可以利用不同视角下ISAR图像的形变特性估计转动角度.但是较复杂的成像问题中,两者高度耦合,必须同时完成,或者说转角(通常是转速)参数也是待搜索变量,这导致良好的初值对于迭代式优化算法非常重要.本文提出了一种基于神经网络的转角估计方法,它可以处理非均匀孔径数据、估计转角的二阶变化,从而可应对目标的部分机动特性.此方法所给出的转动估计可作为后续成像算法的良好初值,进而降低整个高分辨成像流程的计算量.在大转角范围、稀疏孔径下传统的方法都有其局限性的背景下,本文首次提出的基于神经网络的方法有可能是一种新的实用转动估计方法.1 ISAR目标转动估计方法ISAR与SAR的本质区别是待成像目标的合作性,对于ISAR而言,目标与雷达之间的准确相对运动关系需要从雷达回波数据中获取,因此比一般的成像问题更加困难.1.1 ISAR回波信号模型与转动估计问题雷达发射宽带电磁波被目标后向散射后由雷达接收天线收集,通过解线频调等处理,可以获得角度-频率域回波数据.根据ISAR对目标的观测几何关系(如图1),角度-频率域回波数据E(θk,fτ)与目标散射点间的关系如下:(1)式中:fτ∈[fc-B/2,fc+B/2]为雷达信号的某个频点;σ(xi,yj)为目标上坐标位置为(xi,yj)处的散射中心的散射系数; θk为第k次观测时目标相对于雷达视线的等效转动角度;ε(θk,fτ)代表了测量误差.ISAR成像是从回波数据中反演目标的散射系数的分布σ(xi,yj),这一过程需要雷达与目标间的相对运动,即视角上有所变化,进而形成所谓的合成孔径以提供横向分辨能力.目标与雷达间相对运动可分解为两部分:目标等效中心在雷达视线方向上的平动和目标上各部分相对于等效中心的转动.其中平动部分对2维分辨不起作用,但需要补偿其对回波的影响,式(1)表示经过平动补偿后的信号模型.图1 ISAR对目标的观测几何Fig.1 Observation geometry of ISAR转动部分对成像算法形成横向分辨,至关重要.传统的距离多普勒(range-doppler, RD)算法,假定目标转动角度范围不大且近似匀速转动,此时可认为回波数据与散射系数分布的某种尺度变换σ(τ,fD)之间呈现2维傅里叶变换的关系,因此逆变换可实现成像,即RD图像,但完成目标的横向尺寸标定(即横向距离与多普勒频率之间的对应关系)[7-9]依然需要估计目标转角.一些算法将成像问题转化为优化问题,并将转角作为待优化的参数,这样成像过程和运动参数估计相互耦合,大大增加了优化问题的难度.而且各种非线性优化方法都需要良好的初值,否则很容易陷入到较差的局部极值点.在上述意义下,对转动的准确估计对于快速成像或图像尺寸定标意义重大.目前的转动估计可以归结到三类:1)基于相位函数多项式系数的反演方法[9];2)基于优化目标函数的方法[4];3)基于相继帧ISAR RD图像关联匹配的方法.第一类方法通常需要几个特显点,对信噪比(signal-noise ratio, SNR)要求较高,不够稳健;第二类方法计算量往往比较大,因为要通过交替迭代优化格式对转动参数和ISAR像分别进行估计;第三类方法根据转动对RD图像的影响,利用不同短时间窗内的成像结果去反演转动参数[8,10],此方法较为稳健.但是对于非匀速转动和非均匀孔径的成像情景下,目前只有第二类方法能够有效处理转动估计问题,但其计算量问题和初值依赖性有待解决.1.2 转动估计神经网络对转角估计问题虽然可建立较精确的模型,但并不能像很多估计问题那样去构造估计量,而只能通过参数搜索或者将其作为部分待优化变量得到较准确的估计.神经网络适合于处理难以建模其过程或者虽然可以建模但难以求解的问题,目前在并行计算能力和大数据的帮助下,它已经在多个领域中取得了惊人的成就,包括图像识别和目标检测、语音识别和理解等[11-12].本节给出一个基于深度学习的转角估计方法,实现给定雷达配置情况下从回波数据中估计转角,此方法不需要任何初值或参数化搜索,其计算量是恒定的.下面将针对某个配置给出网络的具体定义,本文中的方法很容易推广到其他配置情况下(因为回波数据的维度可能改变).设雷达信号共有192个频点,每512个慢时间周期进行一次成像,在稀疏孔径下,很多慢时间点并不能采集到回波信号(本例中稀疏度为0.1~0.4).针对这些慢时间周期,本文采用的方法是对其补零,最终将输入到神经网络的回波数据的尺寸固定为512×192×2.转动估计问题与一般的图像识别问题差别很大,一些传统的著名视觉任务神经网络不能提供直接借鉴,需要重新设计某种神经网络,通过多次实验,本文确定了图2中的神经网络结构.图2 转角估计神经网络架构Fig.2 Neural network architecture for rotation angle estimation网络的输入是高分辨一维距离像(high resolution range profile, HRRP),输入数据是4维的,其中第1维表示批序号,第2维表示HRRP的实部和虚部,第3维表示慢时间周期序号k,第4维表示径向单元.输入数据需要经过简单的归一化,即输入数据整体乘以某个系数以保证网络中待训练参数的层,主要包括2D卷积层和线性变换层,网络涉及到两种非线性激活函数,即泄露线性整流函数Leaky Relu和Selu(改成其他的非线性函数依然是有效的),前者用在卷积层之间,引入非线性同时简化训练,后者用在线性变换层之间,是为了引入更多非线性.最后一个全连接层(参数最小二乘拟合层前)的输出为4维向量,代表了1、128、384、512这4个慢时间周期对应的转角.此外给定约束限制条件,在慢时间第257周期时,目标的转动角度为0,故可用含有两个参变量的2阶模型来表示转角变化.参数最小二乘拟合层利用最小二乘方法实现从全连接层输出的4维矢量到转动角度和转动加速度的估计,然后在转角计算层计算得到每一个慢时间周期的转角,并以此作为网络的最终输出结果.图2中的网络带训练参数的层,包括:4个卷积层、5个线性变换层和1个Squeeze and Excitation模块.总的待训练参数个数约为197万.最后的线性变换层(参数最小二乘拟合层)输出了4个数,表示为y,分别对应了慢时间ti(i=1,2,3,4)时的转动角度,假设中心时刻为to,则参数最小二乘拟合层的操作为x=Qy (Q=(TTT)-1TT),其中T为4×2的矩阵,Ti1=ti-to,Ti2=0.5(ti-to)2.x就是转动速度和转动加速度的估计值.接着根据计算第k个慢时间周期tk对应的转动角度.设目标的转动角度为θk,第k个慢时间周期是否观察到目标的指示变量为nk,神经网络估计得到的转动角度为这样可以定义损失函数为(2)式中:L表示最大估计误差;w、b代表网络中待学习的权重和偏置参数.式(2)中之所以有两项,是因为当网络所估计的转角刚好和转角真值是相反数时对成像算法的效果不影响,但会导致横向坐标反向.图2中的网络是基于卷积神经网络(convolutional neural network, CNN)的网络架构,但是与针对光学视觉任务常采用的神经网络结构差别较大,其中主要原因是慢时间维度和径向距离维度并不是同质的,因此不能同等看待,这在网络设计中有所体现.从慢时间维度来看,可以将输入数据看作是序列数据,故采取循环神经网络(recurrent neural network, RNN)架构也是合理选择,但是经过多次实验,RNN训练起来更为困难,其性能接近CNN架构而不能显著超过,此外RNN进行一次估计所需要的时间明显长于CNN,因此本文中只是介绍了基于CNN的架构.2 训练数据集和参数学习方法ISAR转角估计实际上是一个确定信号模型下的参数估计问题,虽然模型具有确定性,但问题本身依然难以求解,本文采用的神经网络方法完全放弃了直接利用物理模型所代表的专业知识,除了在网络设计过程中间接地利用了研究者对此问题的一些感性认识以外,仅从数据中直接学习获得估计器.因此,数据集的设计特别重要,数据集如果能够包含足够多的模式,特别是和现实成像过程相符合的模式,所学习到的估计器将具有强大的推广能力, 可以用在实际的问题中.2.1 数据集生成模型直接从雷达上采集回波数据和测量目标对应的视线角度来获取大批量的样本是不现实的.因此需要定义一个生成模型,以生成大批量的数据.在给定频点和成像场景范围下,按照步骤生成单个样本对,即:按照某种或多种分布确定散射中心数目(比如散射点数目是泊松分布或者一定范围的均匀分布);随机确定每个散射中心所在的位置(依据场景范围或者特别感兴趣目标的角点位置);按照某种分布确定散射中心的散射系数;按照匀速转动或匀加速转动,确定目标的转角(转动参数随机、确保转动范围符合成像分辨条件);按照几种生成模型确定平动误差(线性项误差、高斯噪声误差、常值误差等);根据ISAR回波信号模型计算回波数据并依据设定的SNR添加噪声.2.2 网络训练方法选用的优化方法是Adam,初始学习率为3×10-4,批尺寸为32,在训练过程中,以8 192个验证样本计算验证误差,若验证误差不变,训练处于停滞,将学习率降为一半,直到验证误差最后不再降低.若训练一段时间后,训练结果出现退化停滞,比如输出的角度总是常数,应该重新初始化网络,并重新训练.3 仿真实验与算法结果为了验证上述方法的有效性,本文进行了系列仿真实验.雷达系统和成像场景参数如下:雷达中心频率11 GHz;雷达信号带宽1 GHz;目标最大转角范围1°~20°;孔径稀疏度范围0.1~0.4(实际上回波数据只有50到205条).数据中含有不同水平的噪声,其SNR均匀分布于[5,15]之间.以最大绝对误差作为评估算法性能指标,测试数据集中共有16 392条数据.算法结果如表1.可以看到在SNR高于3 dB时,若SNR升高,网络的估计性能有所增加,而当SNR降低时,其性能显著降低(当然这与训练数据的SNR分布有关,若训练数据中有一定比例的低SNR数据,在测试数据SNR较低时其性能应有所改善,但是其趋势将是一致的).表1 不同回波SNR下的网络估计性能Tab.1 The estimation performance for echo data with different SNRSNR/dB平均最大估计误差/(°)SNR/dB平均最大估计误差/(°) 150.046 430.063 9 100.047 600.110 8 70.050 1-30.354 6 50.054 2-50.886 3下面是对于8 192个测试样本上的转动角度范围和最大相对误差对比.在测试样本中,转角范围近乎均匀分布于[1°,20°].图3给出的基本结论是,当转动角度较小时(Δθ≤3°),其相对误差(relative error)通常比较大;而当转动角度较大时,其相对误差较小,绝大部分小于1.5%.此现象可以解释为:当转角范围很小时,xicosθk+yjsin θk≈xi+yjθk,从而导致了严重的不定性问题,比如转角变为原来的1/2,横向位置变为原来的2倍,而回波会近乎不变.图3 相对估计误差VS转角范围Fig.3 Relative estimated error vs rotation angle extent图4是其中16个样本的转角真实值变化情况和对应的估计转角,其中部分样本的转角满足匀加速转动模型,而本文中所设计的神经网络也能够较准确地给出估计.图5是针对某一个回波数据(观测周期内有127条数据),在最大相对误差在不同水平上时利用估计转动角度进行卷积反投影成像所得ISAR像.当相对误差(e为误差,r为相对)不超过1%时,图像的聚焦效果与真值对应的聚焦效果没有显著区别,当相对误差达到10%时,图像发生了一定的散焦,横向尺寸标定也有一定的比例问题,但图像的强散射点及其相对位置信息依然可以从图像中得到.图5定性地说明了转动估计误差水平对成像的影响,又考虑到图4中所示绝大部分相对估计误差低于1%(甚至0.5%),所以本文方法给出的估计结果有很大概率导致较高质量的ISAR像.图4 多条样本下估计角度与真实角度的比较Fig.4 Estimation and ground truth of several examples图5 在不同转动估计误差水平下的CBP成像Fig.5 CBP image in different relative error for rotation estimation4 结论本文针对ISAR成像在稀疏孔径、非均匀转角情况下的转动估计问题,首次提出了一种基于神经网络的方法,此方法利用了对问题建模所得到的知识,通过数据驱动的方式,直接训练得到一个估计器.所得估计结果已经较为准确,可以作为后续算法的良好初值,以提高后续的参数搜索算法或者迭代优化算法的效率和成功率.由于神经网络的黑盒特性和本问题的复杂性,这里很难判断所得到的估计器是否接近理论极限.本文设计网络架构时并没有利用很多专业知识,而结合专业知识可能进一步提高网络的效率.如何结合专业知识和数据驱动方法是值得进一步研究的.参考文献【相关文献】[1] CHEN V C, MARTORELLA M. Inverse synthetic aperture radar imaging: principles, algorithms and applications[M]//Inverse synthetic aperture radar imaging: principles, algorithms, and applications. Scitech, 2014:303.[2] 王芳, 盛卫星, 马晓峰,等. 基于直方图统计量的逆合成孔径雷达目标识别[J]. 电波科学学报, 2012, 27(4): 92-98.WANG F, SHENG W X, MA X F, et al. Target clarification for ISAR image based on histogram statistics[J]. Chinese journal of radio science, 2012, 27(4): 92-98.(in Chinese) [3] XU G, XING M D, ZHANG L, et al. Sparse apertures ISAR imaging and scaling for maneuvering targets[J]. IEEE journal of selected topics in applied earth observations & remote sensing, 2014, 7(7): 2942-2956.[4] LI G, ZHANG H, WANG X, et al. ISAR 2-D imaging of uniformly rotating targets via matching pursuit[J]. IEEE transactions on aerospace & electronic systems, 2012,48(2):1838-1846.[5] YEH C M, XU J, PENG Y N, et al. Cross-range scaling for ISAR based on image rotation correlation[J]. IEEE geoscience & remote sensing letters, 2009, 6(3):597-601.[6] YEH C M, XU J, PENG Y N, et al. Cross-range scaling for ISAR via optical flow analysis[J]. IEEE aerospace & electronic systems magazine, 2012, 27(2):14-22.[7] KANG B S, BAE J H, LEE S J, et al. Simultaneous estimation of rotation velocity and center for ISAR cross-range scaling[C]//IEEE Conference on Antenna Measurements & Applications (CAMA). Antibes Juanles-Pins, November 16-19, 2014. DOI:10.1109/CAMA.2014.7003317[8] KANG B S, BAE J H, KANG M S, et al. ISAR cross-range scaling via joint estimation of rotation center and velocity [correspondence][J]. IEEE transactions on aerospace electronic systems, 2016, 52(3):1454-1460.[9] WEI Y, TANG L, ZHANG X, et al. Estimation of the rotation angle by phase slope for ISAR imaging[C]//Wireless Communications & Signal Processing (WCSP). IEEE, 2012: 1-4.[10] WANG X, ZHANG M, ZHAO J. Efficient cross-range scaling method via two-dimensional unitary ESPRIT scattering center extraction algorithm[J]. IEEE geoscience and remote sensing letters, 2015, 12(5): 928-932.[11] LECUN Y, BENGIO Y, HINTON G. Deep learning[J]. Nature, 2015, 521(7553):436.[12] SCHMIDHUBER J. Deep learning in neural networks[M]. Oxford: Elsevier Science Ltd, 2015.。
复杂运动目标的 ISAR 成像算法研究概要

硕士学位论文复杂运动目标的ISAR 成像算法研究STUDY OF ISAR IMAGING ALGORITHM FORCOMPLEX MOTION TARGET张涛哈尔滨工业大学2012年7月国内图书分类号:TN957.52 学校代码:10213 国际图书分类号:681.14 密级:公开工学硕士学位论文复杂运动目标的ISAR 成像算法研究硕士研究生:张涛导师:王勇副教授申请学位:工学硕士学科:信息与通信工程所在单位:电子与信息工程学院答辩日期:2012年7月授予学位单位:哈尔滨工业大学Classified Index: TN957.52U.D.C: 681.14Dissertation for the Master Degree in EngineeringSTUDY OF ISAR IMAGING ALGORITHM FORCOMPLEX MOTION TARGETCandidate :Tao ZhangSupervisor : Associate Prof. Yong WangAcademic Degree Applied for: Master of EngineeringSpeciality : Information and CommunicationEngineeringAffiliation : School of Electronics andInformation EngineeringDate of Defence:July, 2012 Degree-Conferring-Institution :Harbin Institute of Technology哈尔滨工业大学工学硕士学位论文摘要逆合成孔径雷达(ISAR成像因其全天候、全天时、远距离以及在不同频段、,极大地提高了雷达获取信息的能力,对民用和军用均有重大的实用价值。
近年来,随着ISAR 成像技术的不断发展,平稳目标的ISAR 成像技术逐渐趋于成熟,越来越多的研究者将目光集中在了复杂运动目标的成像研究方面。
MIMO-ISAR匀加速旋转目标运动参数估计及性能分析

MIMO-ISAR匀加速旋转目标运动参数估计及性能分析
陈刚;顾红;苏卫民;王桁
【期刊名称】《电子与信息学报》
【年(卷),期】2014(36)8
【摘要】MIMO雷达采用ISAR技术成像时需要估计目标的运动参数,为回波数据的方位向重排与插值提供依据,以及实现距离-多普勒图像的横向定标.针对匀加速旋转目标,该文提出一种初始角速度和转动加速度联合估计方法.借助MIMO雷达多通道观测的结构优势,根据不同通道回波间相位差异,通过估计差异信号相位系数获得目标运动状态.在此基础上,分析了算法推导过程中因函数近似引起的误差,同时对算法的分辨能力给出定量评估.最后,通过仿真验证了分析推导的正确性.
【总页数】7页(P1919-1925)
【作者】陈刚;顾红;苏卫民;王桁
【作者单位】南京理工大学电子工程与光电技术学院南京210094;南京理工大学电子工程与光电技术学院南京210094;南京理工大学电子工程与光电技术学院南京210094;解放军理工大学通信工程学院南京210094
【正文语种】中文
【中图分类】TN957.51
【相关文献】
1.匀加速旋转目标ISAR成像的横向分辨率 [J], 马长征;张守宏
2.参数化时频分析的匀加速旋转目标ISAR成像 [J], 罗贤全;尚朝轩;何强;吕贵洲
3.基于随机Hough变换的匀加速运动目标检测算法及性能分析 [J], 曲长文;黄勇;苏峰;何友
4.基于匹配傅里叶变换的匀加速旋转目标成像 [J], 黄雅静;曹敏;付耀文;李亚楠;姜卫东
5.匀加速旋转目标的压缩感知ISAR成像 [J], 朱延万;赵拥军;李侃
因版权原因,仅展示原文概要,查看原文内容请购买。
基于深度学习的三维目标检测算法综述
基于深度学习的三维目标检测算法综述邵昀岑(东南大学 软件学院,江苏 南京 211189)摘 要:随着自动驾驶行业的快速发展,基于深度学习的三维目标检测技术也得到了快速发展,目前自动驾驶汽车主要依赖图像与激光雷达点云进行环境感知。
基于这两种数据的三维目标检测技术可提取出物体的空间结构信息,包括物体的姿态、尺寸、运动方向、形状等,因此该技术不仅可用于自动驾驶的感知,还可用于工业机器人对物体的识别与抓取,以及仓储机器人的视觉导航等。
近年来,计算能力的提升、数据集的公开、深度学习的发展,为三维目标检测算法带来了巨大的变革。
关键词:3D目标检测;深度学习;激光雷达点云;计算机视觉;人工智能中图分类号:TP18;TP391.41 文献标识码:A 文章编号:1003-9767(2019)23-026-053D Object Detection Based on Deep LearningShao Yuncen(School of Software Engineering, Southeast University, Nanjing Jiangsu 211189, China) Abstract: With the rapid development of the automatic driving industry, 3D target detection technology based on deep learning has also developed rapidly. At present, self driving vehicles rely mainly on image and LIDAR point clouds for environmental perception. The three-dimensional target detection technology based on these two kinds of data can extract the spatial structure information of the object, including the attitude, size, moving direction, shape, etc. Therefore, the technology can be used not only for the perception of automatic driving, but also for the recognition and grasping of the object by the industrial robot, as well as the visual navigation of the storage robot, etc. In recent years, the improvement of computing power, the openness of data sets and the development of deep learning have brought great changes to 3D object detection algorithm.Key words: 3D Obeject Detection; deep learning; LIDAR point cloud; computer vision; artificial intelligence0 引言自动驾驶汽车依赖的传感器主要是图像摄像头与激光雷达,汽车需要依赖这两种传感器的数据来获知当前位置的环境信息,识别出前方的车辆、行人、物体等,识别的准确度会直接影响自动驾驶系统的行驶决策,这关乎着道路上的行驶安全,所以识别的准确度至关重要。
基于chirplet的弹道目标逆合成孔径雷达回波分解

21年l 00 0月
电
子
与
信
息
学
报
Vo . 2 .0 1 NO 1 3 Oc . 0 0 t 2 1
J u n l f e t o is& I f r a i n T c n l g o r a c r n c o El n o m to e h o o y
I v r e S n he i n e s y t tcApe t r d r Ec o De o po ii n r u e Ra a h c m sto o l s i r g tBa e n Chiplt fBa l tc Ta e s d o i r e
波模型 ,构建 了慢 时间域单频信 号回波 ,分析 了主体和尾 附体 的瞬时多普勒差异 ,提 出了一种基于 c i l hr e p t的慢 时 间域分解方法 ,将主体 回波分解 为若干线性调频信号 ,并重构了主体及尾 附体回波 ,给出了具体实现 步骤,仿真 实 验结果表 明,IAR成像质量较分离前有显著提高 。 S
基于 c i lt的弹道 目标逆合成 孑径 雷达 回波分解 hr e p L
金光虎 高勋章 黎 湘
长沙
陈永光
407) 10 3
f 国防科技 大学 电子科学与工程 学院
( 中国人 民解放 军 6 8 0部 队 洛 阳 4 1 0 ) 38 7 0 3
摘 要 :尾 附体 回波分量 的分离是改善弹道 目标主体 IAR成像质量的关键。该文建立 了主体和尾 附体 的 L M 回 S F
微多普勒剔除得到了飞机复杂运动时的 IA 像。 SR
文献【 分析了平动 、转动、振动的微多普勒特性, 3 ]
分离 了多种不 同微 动信 号 ,实现 了 IAR 成像 。 S 本 文 提 出 了一种 新 的弹 道 目标 回波 分解 方 案 , 根据 L M 回波 特性 构建 了慢 时 间域单 频信 号 回波 , F 对 回波 的多普 勒 分析 表 明 ,尾 附体 回波 在 时频 域近
高速旋转目标三维成像的新算法

高速旋转目标三维成像的新算法
张龙;王琦;李亚超
【期刊名称】《系统工程与电子技术》
【年(卷),期】2010(032)006
【摘要】针对高速旋转目标三维成像的问题,提出一种有效的GRT-CLEAN方法.该方法首先进行平动补偿,将高速目标的回波信号转换为高速转台模型.然后利用基于旋转散射点各次距离像回波的变化曲线所具有的特征,采用广义Radon变换(generalized Radon transform,GRT)得到目标散射点空间位置的近似估计.最后把该目标参数估计方法与修正的CLEAN技术相结合得到每个散射点的特征估计,并进一步得到目标三维像.理论推导与仿真结果验证了该算法的有效性.
【总页数】5页(P1171-1175)
【作者】张龙;王琦;李亚超
【作者单位】西安工程大学电子信息学院,陕西,西安,710048;西安电子科技大学雷达信号处理国家重点实验室,陕西,西安,710071;中国航天科工集团8511研究所,江苏,南京,210007;西安电子科技大学雷达信号处理国家重点实验室,陕西,西
安,710071
【正文语种】中文
【中图分类】TN957.51
【相关文献】
1.一种高速自旋目标三维成像新算法 [J], 贺柏森;张磊;张龙;邢孟道;保铮
2.雷达目标三维成像算法研究 [J], 薛明华;马志扬
3.基于GRT-CLEAN的高速旋转目标快速三维成像方法 [J], 王会;巨欢;方阳;李荣旭;王保平
4.基于光学偏振成像的低纹理目标三维重建算法 [J], 彭群聂;高海峰;张生伟;李宁;李大雷;揭斐然
5.基于Harris角点检测与聚类算法的空间自旋目标干涉三维成像 [J], 梁婷;罗迎;樊昌周;张群;田泰方
因版权原因,仅展示原文概要,查看原文内容请购买。
三维目标检测算法
三维目标检测算法三维目标检测算法是一种用于从给定的3D点云数据中检测和识别目标的技术。
它可以应用于自动驾驶、机器人技术、环境感知等领域。
本文将介绍几种常见的三维目标检测算法。
1. VoxelNet算法:VoxelNet是一种基于三维点云的目标检测算法,它将点云数据转换成体素化表示,然后通过卷积神经网络进行处理。
VoxelNet算法首先将点云数据划分成三维体素网格,并将每个体素内的点云信息编码成一个特征向量。
然后,这些特征向量经过多层卷积神经网络进行处理,最后输出目标的位置和类别信息。
2. PointPillars算法:PointPillars是一种基于点云数据的三维目标检测算法,它采用了一种特殊的编码方式来处理点云数据。
PointPillars算法首先将点云数据投影到一个二维的平面上,然后通过卷积和全连接网络提取特征。
最后,通过回归网络预测目标的位置和类别信息。
3. Frustum-PointNet算法:Frustum-PointNet是一种将图像和点云数据结合起来进行目标检测的算法。
它首先从图像中检测出目标的二维边界框,然后根据边界框在点云数据中提取对应的三维区域(frustum)。
Frustum-PointNet算法将这些三维区域中的点云数据作为输入,通过PointNet网络进行处理,最后输出目标的位置和类别信息。
4. AVOD算法:AVOD(Aggregate View Object Detection)是一种通过融合多个视角信息进行目标检测的算法。
它首先将点云数据投影到多个二维平面上,并将每个平面上的点云数据输入到一个单独的2D目标检测器中。
然后,通过将这些2D检测结果转换到三维空间,从而获得最终的目标位置和类别信息。
这些算法是当前常见的三维目标检测算法,它们通过不同的方式对点云数据进行处理,从而实现目标的检测和识别。
同时,这些算法也面临着一些挑战,如点云数据的不规则性、数据量大等问题。
基于自适应Chirp表示的雷达多目标分辨

基于自适应Chirp表示的雷达多目标分辨
李勇;张怡;廉保旺;刘玉萍
【期刊名称】《西北工业大学学报》
【年(卷),期】2001(019)004
【摘要】针对编队机群目标的低分辨雷达回波多普勒信号的线性调频数学模型,采用先作自适应Chir p信号分解再作维格纳维利分布(WVD)的自适应Chirp表示方法.由于分解所选基函数能够较好匹配雷达回波信号,因而在分析结果中产生的交叉项较少,同时具有较高的时频分辨率和抗噪声能力.采用自适应Chirp表示对实测编队目标的雷达回波信号进行分析,证明了该方法能够有效地实现雷达多目标分辨.【总页数】5页(P605-609)
【作者】李勇;张怡;廉保旺;刘玉萍
【作者单位】西北工业大学电子工程系,;西北工业大学电子工程系,;西北工业大学电子工程系,;北京航空航天大学理学院,
【正文语种】中文
【中图分类】TN957.51
【相关文献】
1.基于稀疏表示的多输入多输出雷达多目标定位 [J], 王彩云;龚珞珞;吴淑侠
2.Chirp子脉冲频率步进雷达多目标折叠问题的解决办法 [J], 宋玉霞
3.宽带雷达Chirp回波的正交稀疏表示及其在压缩感知中的应用 [J], 高磊;宿绍莹;陈曾平
4.基于时频特征的低分辨雷达微动多目标分辨方法 [J], 黄小红;贺夏;辛玉林;陈曾
平
5.基于稀疏表示的频控阵 MIMO 雷达多目标定位 [J], 陈慧;邵怀宗;潘晔;王文钦因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 0 1 3 年1 月
光 电工 程
Op t o — El e c t r o n i c En g i n e e r i ng
vo 1 . 4 0 . NO . 1 J a n . 2 0 l 3
文章 编号 :1 0 0 3 — 5 0 1 X( 2 0 1 3 ) 0 1 — 0 0 0 1 — 0 9
CAI Hon g, YANG Ni ng — g uo, S ONG Ho ng - we i , LI U Ho ng
( N o . 6 3 8 6 3 U n i t s o f P e o p l e L i b e r a t i o n A r m y , B a i c h e n g 1 3 7 0 0 1 , J i l i n P r o v i n c e , C h i n a)
a d a p t i v e G a u s s i a n c h i r p l e t d e c o mp o s i t i o n( AG C D) f a s t a l g o i r t h m, a n d t h e t a r g e t r o t a t i o n s t a t e i s o b t a i n e d b y me a s u i r n g
mo t i o n s t a t e o f t a r g e t i s t wo — d i me n s i o n a l r o t a t i o n . I n t h i s me t h o d , t h e p h a s e s o f t wo a r b i t r a r y s c a t t e r e ry
转动的数据段 进行成像。仿真 实验结果表 明了它的有效性 。
关键词 : 自适应 C h i r p l e t 信号分解;逆合成孔径雷达;三维转动检测
中图分类号 : T N9 5 8 文献 标 志 码 : A d o i : 1 0 . 3 9 6 9  ̄ . i s s n . 1 0 0 3 . 5 0 1 X. 2 0 1 3 . 0 1 . 0 0 1
自适 应 C h i r p l e t 信 号 分 解 用 于 I S AR 目标 三 维 转 动 检 测
蔡 洪 ,杨 宁 国,宋宏伟 ,刘 红
(中国人 民解放军 6 3 8 6 3 部 队 ,吉林 白城 1 3 7 0 0 1 )
摘要 :当 I S A R 目标作 复杂的三 维转 动时, 目标上各散射 点的相 位误差将与它们在 目标上所处的位置有关 ,传统
A b s t r a c t : I n I n v e r s e S y n t h e t i c A p e r t u r e R a d a r( I S A R )i ma g i n g , p h a s e e r r o r c a u s e d b y t h r e e - d i me n s i o n a l r o t a t i o n i s
t re h e — d i me n s i o n a l r o t a t i o n d e t e c t i o n me t h o d i s p u t f o r wa r d t o c o mp l e t e t h e s e l e c t i o n o f i ma g i n g t i me s ,i n wh i c h t h e
的相位聚 焦方 法难 以采用统一的相位校正 函数来进行 补偿 。为解决此 问题 ,论文提 出 了一种基 于 自适应 C h i r p l e t 信号分解 的 I S A R 目标三维转动检 测方法,该 方法使 用 自适应 C h i r p l e t 信号分解的快速算法来估计散射点子回波 的相位信 息,并根据 两个散射点相位之 间的非线性度来判 断 目标是 否存在 三维转动,从 而只选择 那些仅具有二维
r e l e v a n t t o t h e p o s i t i o n o f t h e s c a t t e r e r , S O i t i s d i ic f u l t t o u s e t r a d i t i o n a l p h a s e a u t o f o c u s a l g o i r t h ms t o c o mp l e t e p h a s e c o mp e n s a t i o n ,i n wh i c h t h e u n i f o r m p h a s e c o r r e c t i o n f u n c t i o n i s a p p l i e d .I n o r d e r t o r e s o l v e t h i s p r o b l e m ,a
De t e c t i ng t he Th r e e - d i me ns i o na l Ro t a t i o n o f I SAR Ta r g e t Us i n g A da pt i v e Ch i r p l e t S i g na l De c o m po s i t i o n