基于决策树分类的森林信息提取研究_陈利
基于多源遥感数据的森林植被类型分类方法研究111
基于多源遥感数据的森林植被类型分类方法研究摘要:森林是地球上最大的陆地生态系统,是人类赖以生存和发展的必要基础。
它不仅给人类提供丰富的木材和林副产品,而且在调节气候、涵养水源、保护环境等方面均起到重要作用。
因此,开展森林资源调查,掌握森林资源现状及其变化,对于提高林业发展决策水平,促进林业和社会经济乃至全球环境的可持续发展等具有极为重要的意义。
本文利用云南省迪庆藏族自治州五境乡、小中甸、上江乡的SPOT 2.5米分辨率全色影像与10米分辨率多光谱影像融合后形成的多遥感数据对森林植被类型分类方法进行研究,利用ENVI图像处理软件分别进行了传统的监督分类中的最小距离法、最大似然法和基于专家知识的决策树分类法的实验,而且还尝试了面向对象的新的分类方法,对不同的分类方法进行了分类精度的对比,从而提出一个基于多遥感数据的森林植被类型分类方法的可行性建议。
关键词:遥感;图像分类;SPOT5;最小距离法;最大似然法;面向对象Classification of Forest Types Based on Multi-source RemoteSensing DataAbstract: Forest is the largest terrestrial ecosystem on the earth, it is a necessary basis for human existence and development. It is not only to provide people with rich timber and forest by-products, but also play an important role in climate regulation, water conservation and protect environment. Therefore, developing forest resources investigation, getting the status and changes of forest resources, for improving the level of decision-making to promote the forestry development, forestry and social economy and even the global environment sustainable development has the extremely vital significanceBased on remote sensing data acquired by the Diqing Tibetan Autonomous Prefecture in Yunnan Province five Jing Xiang, Zhongdian, Jiang Xiang which is researched on the types of forest vegetation classification, including the minimum distance supervised classification in the traditional method, maximum likelihood method and decision tree based on expert knowledge classification experiments by ENVI and object-oriented classification by ENVI EX,on different classification methods were compared by the classification accuracy, and put forward a feasible suggestion based on the types of forest vegetation classification method .Keywords: Remote sensing; Image classification; SPOT5; minimum distance classifier; maximum likelihood classifier; object-oriented classification.目录第一章绪论 (1)1.1 研究背景 (1)1.2 研究内容及意义 (2)1.3 研究方法与技术路线 (2)第二章图像分类原理 (4)2.1遥感图像分类传统方法 (4)2.2.1 监督分类 (4)2.3 遥感图像分类新方法 (6)2.3.1 基于专家知识的决策树分类 (6)2.3.2 面向对象的分类 (9)2.3.3 小结 (10)第三章数据分析 (11)3.1 传感器波段特征分析 (11)3. 2森林光谱特征分析 (11)第四章分类方法的应用与对比 (14)4.1 监督分类 (14)4.1.1 训练样本的选择 (14)4.2分类结果及分析 (16)4.3 分类结果精度比较 (19)第五章结论和展望 (22)参考文献 (23)第一章绪论1.1 研究背景森林是地球上最大的陆地生态系统,是人类赖以生存和发展的必要基础,是经济建设和生态环境建设中不可缺少的可再生资源。
应用无人机可见光影像和面向对象的随机森林模型对城市树种分类

第52卷第3期东㊀北㊀林㊀业㊀大㊀学㊀学㊀报Vol.52No.32024年3月JOURNALOFNORTHEASTFORESTRYUNIVERSITYMar.20241)国家自然科学基金项目(31901298),西藏自治区科学技术重点研发计划项目(XZ202201ZY0003G),福建农林大学省级大学生创新创业训练项目(S202310389046),福建农林大学科技创新专项基金项目(KFb22033XA)㊂第一作者简介:陈逊龙,男,1998年10月生,福建农林大学林学院,硕士研究生㊂E-mail:1220496002@fafu.edu.cn㊂通信作者:张厚喜,福建农林大学林学院㊁南方红壤区水土保持国家林业和草原局重点实验室(福建农林大学)㊁海峡两岸红壤区水土保持协同创新中心(福建农林大学)㊁福建长汀红壤丘陵生态系统国家定位观测研究站,副教授㊂E-mail:zhanghouxi@126.com㊂收稿日期:2023年10月23日㊂责任编辑:王广建㊂应用无人机可见光影像和面向对象的随机森林模型对城市树种分类1)陈逊龙㊀孙一铭㊀郭仕杰㊀段煜柯㊀唐桉琦㊀叶章熙㊀张厚喜(福建农林大学,福州,350002)㊀㊀摘㊀要㊀为及时准确的了解城市树种空间分布信息,提升城市居民生活水平和推动城市生态系统可持续发展㊂以福州市仓山区城市森林为研究对象,应用无人机(UAV)监测城市树种空间分布及其动态变化的可见光影像,根据最佳尺度对影像进行分割,并提取分割对象的光谱㊁地形㊁指数㊁纹理和几何特征㊂通过对不同类型特征的组合构建不同的分类方案,利用递归特征消除法(RFE)筛选出优选特征子集,利用面向对象方法结合随机森林(RF)模型对城市树种进行分类㊂结果表明:在随机森林模型分类的过程中,利用光谱特征对树种分类的总体分类精度为82.12%;地形特征对树种分类的贡献度率为14.96%;指数特征和纹理特征的引入,在一定程度提高了树种的分类精度;几何特征的贡献较小,在分类过程中没有明显的贡献㊂特征优选子集的S10方案分类精度最高,总体精度达92.42%,Kappa系数为0.91㊂说明特征优选能够降低高维度特征的复杂性,在大幅减少数据冗余的同时提高了分类精度㊂在最优特征子集下,随机森林(RF)算法分类的总体精度比极致梯度提升(XGBoost)㊁轻量级梯度提升机(LightGBM)和k最近邻算法(KNN)分别提高了1.15%㊁1.81%和15.15%,Kappa系数分别提高了1%㊁2%和17%㊂关键词㊀城市树种;无人机影像;面向对象;随机森林模型;地形特征分类号㊀S771.8UrbanTreeSpeciesClassificationbyUAVVisibleLightImageryandOBIA-RFModel//ChenXunlong,SunYim⁃ing,GuoShijie,DuanYuke,TangAnqi,YeZhangxi,ZhangHouxi(FujianAgricultureandForestryUniversity,Fuzhou350002,P.R.China)//JournalofNortheastForestryUniversity,2024,52(3):48-59.Inordertoobtaintimelyandaccuratespatialdistributioninformationofurbantreespecies,improvethelivingstand⁃ardsofurbanresidents,andpromotethesustainabledevelopmentofurbanecosystems,thisstudytakestheurbanforestinCangshanDistrict,FuzhouCityastheresearchobject.Itappliesunmannedaerialvehicles(UAVs)tomonitorthevisiblelightimagesofurbantreespeciesspatialdistributionandtheirdynamicchanges.Theimagesweresegmentedbasedontheoptimalscale,andthespectral,terrain,Index,texture,andgeometricfeaturesofthesegmentedobjectsareextracted.Differentclassificationschemeswereconstructedbycombiningdifferenttypesoffeatures,andtheoptimalfeaturesubsetwasselectedusingtherecursivefeatureelimination(RFE)method.Theurbantreespecieswereclassifiedusingtheob⁃ject⁃orientedmethodcombinedwiththerandomforest(RF)model.TheresultsshowedthatintheprocessofRFmodelclassification,theoverallclassificationaccuracyoftreespeciesusingspectralfeatureswas82.12%.Thecontributionrateofterrainfeaturestotreespeciesclassificationwas14.96%.TheintroductionofIndexfeaturesandtexturefeaturesim⁃provestheclassificationaccuracyoftreespeciestoacertainextent.Geometricfeatureshaveasmallcontributionanddonothaveasignificantcontributionintheclassificationprocess.TheS10schemeoffeatureselectionsubsethadthehighestclas⁃sificationaccuracy,withanoverallaccuracyof92.42%andaKappacoefficientof0.91.Thisindicatesthatfeatureselec⁃tioncanreducethecomplexityofhigh⁃dimensionalfeatures,whilegreatlyreducingdataredundancyandimprovingclassifi⁃cationaccuracy.Undertheoptimalfeaturesubset,theoverallaccuracyofclassificationusingtheRFalgorithmwasin⁃creasedby1.15%,1.81%,and15.15%comparedtoextremegradientboosting(XGBoost),lightgradientboostingma⁃chine(LightGBM),andk⁃nearestneighboralgorithm(KNN),respectively.TheKappacoefficientwasincreasedby1%,2%,and17%,respectively.Keywords㊀Urbantreespecies;UAVimagery;Object-based;Randomforestmodel;Terrainfeature㊀㊀城市树木作为城市的重要组成部分是评估城市生态环境的重要指标之一,具有重要的生态㊁经济和社会效益[1]㊂随着城市化进程的不断深化,城市树木的生态效益也日渐凸显㊂然而,不同种类㊁种植结构和种植区域的城市树木会产生不同的生态环境效益[2]㊂因此,及时准确地获取城市树种的类别和空间分布信息对城市规划㊁城市树木的管理与维护具有重要意义[3]㊂传统的城市树种分类主要依靠地面调查,然而该方法存在成本高㊁耗时长且难以获取大尺度数据等不足[4]㊂近年来,遥感技术飞速发展,为城市树种的准确快速识别提供了新的途径㊂然而,传统的高分辨率卫星遥感影像易受天气和环境因素干扰㊁时效性较差且费用昂贵㊂此外,免费提供的卫星遥感影像空间分辨率低,难以适用于树种层面的识别研究[5]㊂相比传统的遥感平台,近地无人机(UAV)能在较小空间尺度上提供高分辨率的遥感影像和地理数据,具有更高的适用性,是遥感数据获取的重要手段之一[6]㊂然而,目前有关树种信息提取的无人机遥感研究多集中于多光谱㊁高光谱影像的分类领域,但由于搭载多光谱㊁高光谱传感器的无人机普遍价格昂贵,极大地限制了其在实际生产中的推广应用㊂随着数码技术的发展,通过搭载可见光传感器的无人机获取包含树种信息的遥感影像,具有获取方便㊁成本低㊁空间分辨率高等优点,已成为遥感影像识别树种研究方向上重要的数据源之一[7]㊂根据遥感影像分类单元的不同,可将分类方法归为基于像元和面向对象两类㊂基于像元的方法主要关注局部像素的光谱信息,在处理高分辨率遥感影像时对噪声比较敏感㊁稳健性差,极易出现错分㊁漏分现象[8]㊂为弥补基于像元方法的不足,面向对象的影像分析技术(OBIA)逐渐被用于处理高分辨率遥感影像[9]㊂OBIA方法综合考虑区域相邻像素的纹理㊁形态以及空间结构等多维特征,减少了 椒盐噪声 的同时,通常具有更高的准确率[10]㊂然而,随着特征维数的增加,数据处理的难度呈几何倍数增长,使得传统分类算法的应用受到一定限制㊂随机森林(RF)是一种基于集成学习思想集成多颗决策树的机器学习算法,通过对样本的决策树建模以及组合多棵决策树的预测,最终由分类树投票决定数据的分类[11]㊂随机森林算法不仅具有模型简单㊁分类精度更高㊁校正参数更少的特点,而且鲁棒性强,不易过拟合,在遥感领域高维特征分类中得到广泛应用[12]㊂面向对象方法可以有效减少 同物异谱 现象,而随机森林算法在处理高维数据时有其独特的性能优势,二者的结合在一定程度上提高了分类精度㊂宗影等[13]将面向对象方法和随机森林算法的有机结合,有效提高了滨海湿地植被的分类精度,总体精度达87.07%;赵士肄等[14]将面向对象方法和随机森林算法应用于耕地领域,并与其他机器学习分类算法进行对比验证,结果表明基于面向对象的随机森林模型取得了最高的耕地提取精度,并减弱了 椒盐 噪声,优化了分类结果;耿仁方等[15]研究结果表明,基于面向对象结合随机森林算法对岩溶湿地植被具有较高的识别能力,在95%置信区间内的总体精度为86.75%㊂虽然该方法的研究已经取得了一定的成功,但不同类型的特征对城市树种信息提取效果的影响尚不明确㊂因此,面向对象结合随机森林的方法对于城市树种分类的效果有待进一步探讨㊂此外,目前主流的数据源是大尺度的卫星影像和航空影像,或者是特征信息更加丰富的多光谱和激光雷达影像,而消费级无人机可见光影像在城市树种的精细分类方面还鲜有报道㊂因此,本文以福州市仓山区无人机可见光影像为研究对象,基于OBIA-RF模型,通过特征优选,构建最佳子集并比较不同机器学习算法的分类精度,并分析不同特征对城市树种分类的影响,构建该研究区城市行道树的最佳特征子集,比较不同分类算法对城市树种的分类效果,进一步评估OBIA-RF模型的分类性能和适用性,为城市生态系统保护及生态环境治理提供技术支持㊂1㊀研究区概况研究区位于福建省福州市仓山区(见图1),该区域属于南亚热带海洋性季风气候温暖湿润,冬季无严寒,夏季无酷暑㊂年日照时间1700 1980h,年降水量900 2100mm,气温20 25ħ㊂福州市仓山区典型树种包括白兰(Michelia✕alba)㊁荔枝(Li⁃tchichinensis)㊁芒果(Mangiferaindica)㊁南洋楹(Fal⁃catariafalcata)㊁榕树(Ficusmicrocarpa)㊁棕榈(Tra⁃chycarpusfortunei)㊁樟(Cinnamomumcamphora)等㊂研究区地势平坦,自然环境相对复杂,具备城市的基本特征,对研究城市树种分类具有一定的代表性㊂2㊀研究方法2.1㊀无人机数据采集与预处理实验数据于2020年2月8日采集,采用搭载FC6310S可见光镜头的大疆精灵4Pro(DJIPhantom4Pro)无人机进行航拍获取研究区影像,为削弱阴影对分类过程的干扰,选择天气状况良好无风有云的时间段进行作业㊂飞行相关参数设置如下:航高设置为60m,航向与旁向重叠率均为70%,镜头角度-90ʎ,光圈值f/5,曝光时间1/200s,IOS速度为IOS-400㊂本次飞行共获得450张航拍影像,照片分辨率为5472ˑ3078㊂通过瑞士Pix4Dmapper专业摄影测量软件对所采集的原始数据进行空中三角测量㊁点云重建㊁裁切以及镶嵌等操作,得到研究区的正射影像(DOM)和数字地表模型(DSM)㊂为了精确获得研究区的道路信息,采用天地图在线矢量影像作为辅助信息,并通过手绘的方式提取道路矢量数据㊂根据实际调查情况,利用缓冲分析,将缓冲距离设置为5m,得到了行道树的矢量分布图,然后,将矢量布图与原始影像叠加,最终裁剪出了研究区影像㊂2.2㊀地形特征提取归一化数字表面模型(nDSM)是一种反映地物绝对高度的高程模型[16],可为地物判别提供可靠依94第3期㊀㊀㊀㊀㊀㊀㊀陈逊龙,等:应用无人机可见光影像和面向对象的随机森林模型对城市树种分类据㊂使用ArcMap10.2软件进行地形特征提取㊂首先,通过人工目视解译方法从DSM中选取950个地面点,并批量提取栅格的高程信息,其中100个样本点的高程数据用以验证精度㊂其次采用插值的方法生成数字高程模型(DEM)㊂为获取更加精确的地面高程信息,比较常见的插值方法(克里金插值法㊁反距离权重法㊁样条插值法以及自然邻域法)生成的数字高程模型(DEM),以均方根误差㊁平均绝对值误差和决定系数(R2)作为评分指标(见表1)㊂4种插值方法均可得到较高精度的DEM数据,综合考虑决定系数(R2)㊁平均绝对值误差以及均方根误差,最终确定采用克里金插值法生成连续的DEM数据㊂最后,根据已生成的DEM数据,利用Arc⁃Map10.2软件中的栅格计算器,将DSM数据与DEM数据相减得到nDSM数据[17]㊂图1㊀研究区概况图表1㊀不同插值方法精度评价方㊀法决定系数(R2)平均绝对值误差均方根误差克里金插值法0.990.070.04反距离权重法0.990.080.04样条插值法0.990.080.05自然邻域法0.990.070.042.3㊀最佳分割尺度确定影像分割是面向对象方法中至关重要的初始环节,分割结果将直接影响分类精度[18]㊂本研究采用尺度参数评价工具(ESP2),结合目视解译的方法确定最佳分割尺度,所有图像分割过程均在eCogni⁃tion9.0Developer9.0软件完成㊂ESP2是用以评价不同尺度影像整体最大差异性的工具,通过计算整体局部方差均值随尺度变化率评估不同地物所对应的最佳尺度参数[19]㊂而ESP2计算出的尺度参数往往是多个值,需要结合人工目视才能确定最佳分割尺度㊂形状参数和紧致度参数是准确表示不同树种轮廓,使得对象内部同质性高的关键㊂综合考虑无人机影像的特点以及影像对象形状和紧致度因子的相互关系,将形状参数设置为0.5,紧致度参数设置为0.3㊂其他必要参数为:各波段的权重值设置为1㊁起始分割尺度为40㊁分割步长为1㊁迭代80次㊂随着尺度的增大,局部方差均值整体呈现上升的趋势,而尺度变化率呈现下降的趋势(见图2)㊂为了获得图像的过分割和欠分割之间的临界值,选取尺度变化率峰值为51㊁57㊁76㊁80㊁89㊁104㊁109和118作为相对最佳分割尺度参数,采用多尺度分割算法得到分割结果(见图3)㊂当分割尺度参数设置较大(分割尺度参数大于104)时,白兰㊁榕树和背景多处05㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀东㊀北㊀林㊀业㊀大㊀学㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第52卷被划分为同一个对象,不同树种存在混淆现象难以被区分㊂当分割尺度参数设置较小(分割尺度小于76)时,不同地物内部出现了过分割现象,增加了数据冗余㊂当分割尺度参数设置76 89时,植被与背景区分相对明显,不同的树种之间能够被分割成独立的对象,整体分割效果较为理想㊂权衡分割效果与实际情况的吻合度,最终确定研究区无人机影像最佳分割尺度参数为76,并利用该分割尺度参数进行城市行道树提取㊂图2㊀ESP2最佳分割尺度估计图图3㊀不同尺度参数分割效果图2.4㊀对象光谱特征提取光谱特征是遥感影像的重要特征之一,地物通常具有不同的光谱特征,因此根据可见光影像中的地物光谱信息的差异可以用来区分不同的地物类型[20]㊂植被指数利用植被在不同波段下反射和吸收的特性,增强植被信息的同时使非植被信息最小化[21],被广泛应用于林业病虫害防治㊁农作物生长量估计㊁生态环境监测等领域[22]㊂在遥感图像中,不同地物通常具有复杂程度不同的边缘特征,因此,形状特征可以作为快速准确识别地物类型的有效手段[23]㊂纹理特征是遥感影像的底层特征,不受图像亮度的影响,能够综合反映像素的灰度分布和结构信息,利用纹理特征可以有效弥补可见光影像光谱信息的不足[6]㊂在面向对象的分类过程中,结合纹理特征对于提升分类精度效果显著[24]㊂地形特征能真实反映不同地物的高程信息,在影像分类过程中对于区分不同类型的地物具有重要意义㊂因此,本研究共选取光谱㊁指数㊁纹理㊁几何以及地形5大特征,剔除无效特征筛选出40个子特征,具体如下:(1)光谱特征(SPEC):主要包括:红色(R)波段的像元亮度的均值(MR)㊁绿色(G)波段的像元亮度的均值(MG)㊁蓝色(B)波段像元亮度的均值(MB)㊁最大差异值(Md)㊁亮度值(Br)㊂(2)指数特征(INDE):包括植被颜色指数(ICIVE)㊁可见光波段差异植被指数(IVDVI)㊁联合指数2(ICOM2)㊁超绿指数(IEXG)㊁超绿超红差分指数(IEXGR)㊁植被指数(IVGE)㊁归一化红绿差异指数(INGRDI)以及归一化绿蓝差异指数(INGBDI)(见表2)㊂(3)几何特征(GEOM):包括面积㊁边界长㊁宽度㊁长度㊁不对称性㊁长宽比㊁边界指数㊁圆度㊁像素个数㊁紧致度㊁体积㊁密度㊁椭圆拟合㊁主方向㊁形状指数㊁最大封闭椭圆半径㊁最小封闭椭圆半径以及矩形拟合㊂15第3期㊀㊀㊀㊀㊀㊀㊀陈逊龙,等:应用无人机可见光影像和面向对象的随机森林模型对城市树种分类(4)纹理特征(GLCM):基于灰度共生矩阵(GLCM)提取影像的纹理特征,包括对比度(TCON)㊁相关性(TCOR)㊁相异性(TDIS)㊁熵(TENT)㊁同质度(THOM)㊁均值(TMEA)㊁角二阶矩(TASM)和标准差(TSD)等特征值[6](见表3)㊂(5)地形特征:归一化数字表面模型(nDSM)㊂表2㊀植被指数及表达式指数特征公㊀式归一化红绿差异指数(INGRDI)[25]INGRDI=(MG-MR)/(MG+MR)归一化绿蓝差异指数(INGBDI)[26]INGBDI=(MG-MB)/(MG+MR)超绿指数(IEXG)[27]IEXG=2MG-MB-MR超绿超红差分指数(IEXGR)[28]IEXGR=MG-MB-2.4MR可见光波段差异植被指数(IVDVI)[21]IVDVI=(2MG-MR-MB)/(2MG+MR+MB)植被颜色指数(ICIVE)[29]ICIVE=0.44MR-0.88MG-0.39MB+18.79植被指数(IVGE)[30]IVGE=MG/MaRM1-aB,a=0.667联合指数2(ICOM2)[31]ICOM2=0.36IEXG+0.47ICIVE+0.17IVGE㊀㊀注:MR㊁MG㊁MB分别为红㊁绿㊁蓝波段像元亮度的均值㊂表3㊀纹理特征及表达式纹理指标公㊀式角二阶矩(TASM)TASM=ðNgi=0ðNgj=0p(i,j)2对比度(TCON)TCON=ðNgi=0ðNgj=0p(i,j)ˑ(i-j)2相关性(TCOR)TCOR=ðNgi=0ðNgj=0((i-ux)ˑ(j-uy)ˑp(i,j)2)/σxσy相异性(TDIS)TDIS=ðNgi=0ðNgj=0p(i,j)ˑ|i-j|熵(TENT)TENT=ðNgi=0ðNgj=0p(i,j)ˑlnp(i,j)同质度(THOM)THOM=ðNgi=0ðNgj=0p(i,j)ˑ(1/(1+(i+j)2))均值(TMEA)TMEA=ðNgi=0ðNgj=0p(i,j)ˑi标准差(TSD)TSD=ðNgi=0ðNgj=0p(i,j)ˑ(i-ux)2㊀㊀注:其中i,j是像元在图像中的行列坐标,p(i,j)为像素对的频数,Ng为灰度级数,ux㊁σx分别为px的均值和标准差,uy㊁σy分别为py的均值和标准差㊂2.5㊀试验样本选取本实验通过实地调查获取样本数据㊂调查者沿着研究区的主要道路记录了绿化树种,并排除了数量较少或被其他冠层遮挡的树种,最终确定了7类树种(白兰(Michelia✕alba)㊁荔枝(Litchichinensis)㊁芒果(Mangiferaindica)㊁南洋楹(Falcatariafalca⁃ta)㊁榕树(Ficusmicrocarpa)㊁棕榈(Trachycarpusfor⁃tunei)㊁樟(Cinnamomumcamphora))以及草地㊁灌木作为研究对象㊂根据遥感影像中不同地物类型的分布位置与大致面积比例,共选取了1100个样本点㊂为了避免较小的样本数量影响模型分类精度,将最小样本数量设置为60㊂采用Scikit-learn中内置的train_test_split函数进行分层抽样,按7:3的比例将数据划分为训练集和测试集(见表4),使各类别样本点数量大致与该类别的总面积成比例㊂训练集用于构建分类模型,测试集用于验证分类精度㊂表4㊀训练和验证样本地物总样本数训练样本数测试样本数白兰20014060草地503515灌木503515荔枝1409842芒果20014060南洋楹1208436榕树1409842棕榈604218樟1208436总计11007703302.6㊀分类模型与参数优化2.6.1㊀随机森林算法随机森林算法(RF)是一种通过集成学习的装袋思想将多棵决策树集合起来的算法,每棵决策树都充当预测目标类别的分类器㊂随机森林模型在样本数据和分类特征选择方面具有随机性,不容易过拟合,并且表现出良好的稳健性,即使在处理具有缺失值的高维数据时,仍能保持较高的分类精度㊂因此,它被认为是当今最好的算法之一[32]㊂目前,随机森林算法已经广泛集成在各种软件包中,使用Stata数据管理统计绘图软件㊁R语言统计软件可以轻松实现㊂在模型构造的过程中,通常只需要确定每个树节点包含的特征数量(M)以及决策树数量(N),就足以保证模型的性能[33]㊂本文采取递归特征消除法(RFE)[34]结合交叉验证(Cross-Validation)确定最佳特征数(见图4)㊂随着特征维数的增加,整体分类精度曲线经历 几何增长 ㊁ 缓慢上升 这个两个阶段后趋于平稳㊂当特征数为20时,各分类精度曲线均处于相对最高点,因此最终将特征数量的参数设置为20㊂在使用装袋方法生成训练集的过程中,随机森林算法会导致原始数据集中大约37%的数据未被抽到,这部分数据被称为袋外(OOB)数据㊂利用袋外数据对随机森林模型进行评估是一种无偏估计方法,且在一定程度上能减少计算量,提高算法的运行效率[35]㊂因此,本文采取遍历不同数量(1 1000)决策树的方法,通过比较袋外误差的大小,确定最佳的决策树数量(见图5)㊂当决策树数量小于85时,不同子集的袋外数据误差均随着决策树数量的增加而急剧下降,而后随着决策树数量的增加袋外数据误差的下降速度逐渐迟缓,当决策树数量为200时,袋外数据误差处于相对最低点㊂因此,选择决策树25㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀东㊀北㊀林㊀业㊀大㊀学㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第52卷的最佳数量为200㊂图4㊀模型分类精度与特征数的关系曲线图5㊀袋外误差与决策树数量的关系曲线2.6.2㊀其他分类模型为充分探索随机森林算法对城市树种信息提取的适用性,引入当下流行的机器学习算法作为对照,包括极致梯度提升(XGBoost)㊁轻量级梯度提升机(LightGBM)以及k最近邻算法(KNN)㊂XGBoost是一种基于增强学习(Boosting)的集成算法,它通过在梯度下降方向上将弱分类器集成到强分类器中,并迭代生成新树以拟合先前树的残差㊂XGBoost能够自动利用中央处理器(CPU)的多线程进行分布式学习和多核计算,在保证分类准确度的前提下提高计算效率,尤其适用于处理大规模数据[36-37]㊂LightGBM也属于增强学习方法,基本原理与XG⁃Boost相似㊂但LightGBM使用基于直方图的决策树算法来减少存储与计算成本,并优化模型训练速度[38]㊂KNN算法是一种近似自变量与连续结果之间的关系的非参数方法[39],其基本思路是通过计算待分类样本与临近样本的距离(欧氏距离㊁曼哈顿距离)来确定所属类别,是一种简单而有效的分类算法㊂为了防止过拟合,本研究在JupyterNotebook平台上利用Scikit-learn库中的GridSearchCV包对这3种分类器参数进行了调优(见表5)㊂表5㊀不同分类器的超参数分类器参㊀数参数取值范围极致梯度提升(XGBoost)决策树数量[50,100,150,200]最大树深度[3,5,7,9]学习率[0.01,0.05,0.10]样本抽样率[0.6,0.8,1.0]特征抽样率[0.6,0.8,1.0]轻量级梯度提升机(LightGBM)学习率[0.01,0.05,0.10]决策树数量[50,100,150,200]叶子节点数[10,20,30,40]最大树深度[3,5,7,9]k最近邻算法(KNN)近邻数[1,2,3,4,5,6,7,8,9,10]2.7㊀试验方案构建不同树种之间单一特征的差异有限,难以满足树种分类的要求㊂因此,本研究采取增加特征数量的方式来提高分类精度,并探究不同特征组合对分类结果的影响(见表6)㊂表6㊀研究区各地物特征值地物特征不同地物的特征值草地灌木白兰荔枝芒果南洋楹榕树棕榈樟面积6859.673636.732928.797194.057200.108688.483457.752263.137325.01不对称性0.550.430.440.430.450.420.480.560.45边界指数1.741.462.011.971.991.842.062.191.79边界长578.70340.20431.95650.41669.29670.73488.16408.63601.00亮度值83.1078.79115.6974.0977.2081.1571.6396.8763.83植被颜色指数-29.14-33.17-47.78-21.15-18.89-21.62-29.96-17.74-20.18联合指数214.1116.2520.1911.7410.7511.6015.279.2511.82紧致度1.851.631.871.911.861.802.002.361.85密度2.032.102.042.102.102.161.971.822.09超绿指数76.6087.77117.8159.6253.9359.8280.8348.3158.52超绿超红差分指数-215.56-204.06-304.33-194.88-204.07-199.54-168.32-273.24-155.97椭圆拟合0.680.750.630.670.670.710.590.500.68角二阶矩000000000对比度556.77786.24877.55597.29614.12770.77714.25765.51514.11相关性0.870.820.820.880.880.840.850.860.90相异性17.1319.0521.6618.1218.6820.2819.7219.6216.64熵8.798.668.909.149.189.198.948.699.07同质度0.060.060.050.050.050.050.050.050.06均值127.03126.07125.67126.81126.68126.73126.23125.97126.8835第3期㊀㊀㊀㊀㊀㊀㊀陈逊龙,等:应用无人机可见光影像和面向对象的随机森林模型对城市树种分类续(表6)地物特征不同地物的特征值草地灌木白兰荔枝芒果南洋楹榕树棕榈樟标准差34.1734.6536.2336.4036.2335.7636.4037.6636.32长度143.4591.1085.96136.33136.90144.38100.0389.62138.31长宽比1.811.741.521.551.551.511.621.781.61主方向113.61130.6395.3296.5294.5694.5591.4883.5681.45最大差异值1.641.691.531.471.361.201.501.341.46蓝色(B)波段像元亮度的均值84.4766.8094.6274.2079.0881.7263.64105.5364.38绿色(G)波段像元亮度的均值136.22133.75189.36116.28116.90120.40118.79141.29101.72红色(R)波段像元亮度的均值111.38112.92166.2898.74100.7999.2693.11128.7580.55归一化数字表面模型0.321.7012.517.1612.0423.2010.9611.938.67归一化绿蓝差异指数0.210.270.270.200.170.180.260.130.21归一化红绿差异指数0.100.090.070.080.070.100.130.050.12像素个数6859.673636.732928.797194.057200.108688.483457.752263.137325.01最大封闭椭圆半径0.580.720.490.560.540.610.450.380.59最小封闭椭圆半径1.451.391.441.491.451.431.511.631.45矩形拟合0.820.860.800.820.820.830.780.740.82圆度0.860.670.950.930.920.821.061.250.86形状指数1.841.552.092.042.061.902.162.321.86可见光波段差异植被指数0.170.200.190.150.130.140.210.090.17植被指数1.361.431.381.301.261.301.461.181.37体积6859.673636.732928.797194.057200.108688.483457.752263.137325.01宽度80.7852.7558.0390.8190.4997.8862.9651.4688.94㊀㊀根据优选特征贡献率(见表7),将所选取的5大特征组合形成了10种试验方案(S1 S10)㊂光谱特征作为每幅遥感影像的基本特征,作为基础被纳入到这10种方案的构建中㊂其中,S1仅包含光谱特征;为了全面探究其他特征对分类结果的影响,在S1基础上引入了地形㊁指数㊁纹理等3个总体特征贡献率较高的特征,通过遍历这3个特征的各种组合得到了S2 S8;S9包含了所有的特征;根据20个优选特征组合建立S10,具体的分类方案见表8㊂表7㊀优选特征重要性优选特征重要性/%归一化数字表面模型14.96最大差异值12.41联合指数25.57植被颜色指数5.42绿色(G)波段像元亮度的均值4.84归一化绿蓝差异指数4.67超绿指数4.58亮度值4.36可见光波段差异植被指数3.42植被指数3.26红色(R)波段像元亮度的均值3.05角二阶矩2.90蓝色(B)波段像元亮度的均值2.86超绿超红差分指数2.78标准差2.25归一化红绿差异指数2.23熵2.03相关性1.97均值1.41边界指数1.28表8㊀分类方案方案特征子集特征数量S1光谱5S2光谱+地形6S3光谱+指数13S4光谱+纹理13S5光谱+地形+指数14S6光谱+地形+纹理14S7光谱+指数+纹理21S8光谱+地形+指数+纹理22S9光谱+地形+指数+纹理+几何40S10优选特征202.8㊀精度评价本文根据混淆矩阵对模型的分类精度进行定量评价㊂混淆矩阵也称为误差矩阵,是遥感影像二分类问题上的一种评价方法,反映了分类结果与真实地物类别之间的相关性[40]㊂混淆矩阵的评价指标包括总体精度(OA)㊁Kappa系数(Kp)㊁生产者精度(PA)以及用户精度(UA)㊂其中,总体精度指正确分类样本与总体样本的比值;生产者精度指分类结果与参考分类相符合的程度;用户精度指样本分类正确的可能性;Kappa系数是用于检验遥感影像分类结果的一致性,也可以用以均衡分类效果[41]㊂各指标计算公式如下:㊀㊀㊀㊀㊀OA=ðni=1xiiN;㊀㊀㊀㊀㊀Kp=Nðni=1xii-ðni=1xi+x+iN2-ðni=1xi+x+i;45㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀东㊀北㊀林㊀业㊀大㊀学㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第52卷㊀㊀㊀㊀㊀PA=xii/x+i;㊀㊀㊀㊀㊀UA=xii/xi+㊂式中:N为参与评价的样本总数;n为混淆矩阵的行列数;xii为混淆矩阵第i行㊁第i列上的样本数;xi+和x+i分别为第i行和第i列的样本总数㊂3㊀结果与分析3.1㊀随机森林算法的不同分类方案精度由表9可知,随着不同特征类型数量的增加,总体分类精度和kappa系数整体呈上升趋势㊂其中,仅利用光谱特征作为分类依据的方案S1精度最低,总体精度和kappa系数分别为82.12%和0.79,说明光谱特征是遥感影像最重要的特征之一,但仅利用光谱特征难以达到所需的分类精度㊂方案S2 S4是在S1的基础上分别加上地形㊁指数和纹理特征,相比方案S1,这3个方案的总体分类精度分别提高了5.15%㊁4.55%㊁1.82%,kappa系数分别提高了0.06㊁0.06㊁0.03㊂在分类过程中,地形特征相较于指数和纹理特征扮演着更重要的角色,大幅提高了分类精度㊂方案S5 S7是在光谱特征的基础上加入地形㊁指数和纹理特征的两两组合,旨在研究它们之间的相互作用对分类精度的影响㊂整体而言,与S2 S4相比,这3个方案的总体分类精度呈上升趋势㊂其中,S6具有最高的总体精度和kappa系数,分别达到90%和0.88;其次是S7,和S1相比,总体精度和kappa系数分别提高了7.27%和0.09;而S5总体精度和kappa系数只增长了6.36%和0.08㊂表明地形与指数特征交互作用在分类过程中提供了更大的贡献度㊂方案S8是由特征重要性靠前的光谱㊁地形㊁指数以及纹理特征构成㊂与包含所有特征的方案S9相比,S8反而具有更高的总体分类精度和kappa系数,分别达到92.12%和0.91㊂表明几何特征对分类精度具有负向影响,它的加入降低了分类精度㊂方案S10由优选特征组成,其获得了所有子集中最高的分类精度和kappa系数,分别为92.42%和0.91㊂与S9相比,分类精度提高了0.60%㊂说明特征优选方法能消除高维复杂特征间的信息冗余,使模型仅利用较少特征数量并获得更高的运行效率和分类精度㊂表9㊀不同分类方案分类精度方案总体精度/%Kappa系数方案总体精度/%Kappa系数S182.120.79S690.000.88S287.270.85S789.390.88S386.670.85S892.120.91S483.940.82S991.820.91S588.480.87S1092.420.91㊀㊀由表10可知,虽然S1方案的用户精度与生产者精度整体上处于最低水平,但棕榈树的用户精度达到了100%,表明棕榈与其他树种存在明显的光谱差异㊂方案S2加入地形指数后,各类地物的用户精度与生产者精度相比S1都有不同程度的提高,用户精度提升幅度1.88% 8.18%,生产者精度提升幅度2.78% 11.11%,因为地形特征的加入更好的反映了不同地物之间的空间关系,从而大幅提高了分类精度㊂方案S3在S1的基础上加入了指数特征,荔枝㊁榕树以及樟的用户精度分别提升了10.95%㊁9.18%和8.72%,说明植被指数对荔枝㊁榕树以及樟分类效果显著,但对于其他树种的区分能力有限㊂方案S4加入纹理特征,芒果和樟的用户精度提升了8.85%和9.00%,而棕榈和榕树的生产者精度分别提升了22.22%和11.9%,说明这些树种的纹理结构特异性强与其他地物的差异显著,因此纹理特征的加入对分类精度有正向影响㊂方案S5与S2相比,荔枝和榕树的用户精度提升了7.05%和5.12%,而草地的精度下降了5.88%;与S3相比,灌木的用户精度提升了4.47%㊂总体而言,地形特征与指数特征的组合对分类精度的提升不显著,并且在某些树种的分类上精度出现不同程度的下降,说明这二者的组合产生了冗余信息影响了分类精度㊂方案S6与S2相比,芒果与樟的用户精度分别提升了6.44%和7.66%,而棕榈树和榕树的生产者精度分别提升了27.78%和11.90%,这个结果与方案S4类似,说明地形特征和纹理特征的组合与树种的分类精度呈正相关㊂方案S7与S6相比,除个别树种外,整体精度出现了不同程度的降低,波动范围为-6.21% 4.04%㊂然而,与方案S5相比,总体分类精度有一定的提升,波动范围是-0.58% 7.55%㊂方案S8与表现最好的方案S7相比,荔枝和榕树的总体分类精度分别提升了9.42%和6.67%,其他树种的总体分类精度保持稳定,这表明高维度的特征组合带来了更多的信息,在一定程度上提高了分类精度㊂综合所有特征的方案S9与S8相比,总体分类精度呈现出不升反降的现象,波动范围为-10.23% 4.74%,说明高纬度的特征产生了冗余信息,影响了随机森林模型的分类性能㊂优选特征子集S10与S9相比,总体分类精度有所提升,其中灌木㊁草地以及荔枝的用户精度分别提升了10.23%㊁5.88%和3.55%㊂由此可见,特征优选通过对高维数据集的降维和优化,使模型仅利用较少的特征仍能保证良好的分类效果㊂3.2㊀应用优选特征子集对不同分类模型的精度评价由表11可知,随机森林模型的分类精度最高,总体精度为92.42%,比k最近邻算法(KNN)㊁极致55第3期㊀㊀㊀㊀㊀㊀㊀陈逊龙,等:应用无人机可见光影像和面向对象的随机森林模型对城市树种分类。
随机森林遥感信息提取研究进展及应用研究

测绘与空间地理信息GEOMATICS & SPATIAL INFORMATION TECHNOLOGY第44卷第3期2021年3月Vol.44, No.3Mar., 2021随机森林遥感信息提取研究进展及应用研究赵宇虹(辽宁工程技术大学测绘与地理科学学院,辽宁阜新123000)摘要:随机森林算法已经应用于遥感影像信息提取领域,但鲜有对其应用发展的总结和归纳。
本文介绍了随机森林分类方法的基本原理,并阐述其在多源遥感数据(多光谱数据、高光谱数据、SAR 数据)信息提取以及分类 数据集筛选中的应用研究,通过说明其在分类精度验证、模型可移植性以及算法改进等方面的研究进展,对随机 森林分类方法在今后的发展进行了展望。
该研究有助于初学者对随机森林分类方法进行初步了解,有一定的推广作用。
关键词:随机森林;遥感;信息提取;研究进展中图分类号:P237文献标识码:A 文章编号:1672-5867( 2021) 03-0133-04Advances and Applications of Random Forest RemoteSensing Information ExtractionZHAO Yuhong( College of Surveying , Mapping , and Geographic Sciences ,Liaoning University of Engineering and Technology , Fuxin 123000, China )Abstract :The random forest algorithm has been applied to the field of remote sensing image information extraction, but there is littlesummary and induction of its application development, the paper introduces the basic principle of random forest classification method,and expounds its application research on the information extraction of multispectral remote sensing data ( multispectral data, hyper-spectral data, SAR data) and the screening of classified data sets. By explaining its research progress in classification accuracy verifi cation, model portability, and algorithm improvement, the future development of random forest classification method is proposed. Thisresearch will help beginners to make a preliminary understanding of the random forest classification method, which has a positive effect on its popularization.Key words :random forest ; remote sensing ; information extraction ; research progress0 引 言随着科技的进步,遥感数据的数据量也日益增大,亟 须快速高效的数据处理方法。
基于GF-1影像的森林类型信息提取研究

基于GF-1影像的森林类型信息提取研究发布时间:2022-04-11T11:04:35.666Z 来源:《中国科技信息》2022年1月上作者:郭瑞霞王毅苏建龙李小军[导读] 应用GF-1影像和不同的分类方法,探究GF-1数据对森林类型信息提取的适用性和较好的信息提取方法。
以孟家岗林场为研究区,GF-1影像数据、森林二类调查数据和DEM数据为数据源,将研究区森林类型分为6类,采用最大似然法、光谱角法、随机森林法和K最近邻法进行森林类型信息提取。
兰州信息科技学院郭瑞霞王毅苏建龙李小军甘肃兰州 730000摘要:应用GF-1影像和不同的分类方法,探究GF-1数据对森林类型信息提取的适用性和较好的信息提取方法。
以孟家岗林场为研究区,GF-1影像数据、森林二类调查数据和DEM数据为数据源,将研究区森林类型分为6类,采用最大似然法、光谱角法、随机森林法和K最近邻法进行森林类型信息提取。
结果表明:随机森林法最好,分类精度为83.12%,KAPPA系数0.7717,最大似然法次之,分类精度为81.88%,KAPPA系数0.7575,接下来是光谱角法,分类精度为79.40%,KAPPA系数0.7303,K最近邻法分类效果相对最差,分类精度为79.40%,KAPPA系数0.6758。
关键词:GF-1影像,森林类型,图像分类1 引言森林资源是地球上最重要的资源之一,是可再生自然资源,具有经济、生态和社会三大效益。
而有效利用森林资源需要以森林植被的精准识别为基础。
本文利用研究区2017年不同时相的GF-1影像,通过最大似然法、光谱角法、随进森林法和K最近邻法四种分类方法,提取研究区森林类型信息,分析不同分类方法的优势,得到研究区森林类型信息分布情况,以期为相关部门提供决策支持。
2 数据与研究区2.1研究区研究区为位于黑龙江省佳木斯市桦南县东北部的孟家岗林场,地理坐标为130°32′42″—130°52′36″E,北纬46°20′16″—46°30′50″N。
基于邻近相关图像和决策树分类的森林景观变化检测

tm oa L n st T i g s h n ed t t n ma sw r e eae yu igama hn erigd cs nt e C . ) e p rl a da5 M mae .C a g ee i p eeg n rtdb s c ielann e i o r ( 5 0 . co n i e
u i g r mo e s n i g d t s p o o e sn e t e sn a wa r p s d,a d t e p le o d t c o e tl n s a e c n e i f r to n u e y f r s a n h n a p i d t e e tf r s a d c p ha g n o ma i n i d c d b o e t
L hmig Wa gZ iu iS i n n hh i
L e gu n C e ru LuQ n w n iZ n y a h nE x e i ig a g
( .ntueo oe e ucs nom t nTcnq e, A B in 00 1 2 C iaU i r t o nn 1 Istt fF rsR s re I r ai eh i s C F i t o f o u ei 10 9 ; . hn n esy fMiig& Tcn l y B in 0 0 3 jg v i e o g ei 10 8 ) h o jg
第4 7卷 第 9期
20 11年 9 月
林
业
科
学
Vo . 1 47. . NO 9
S ENI CI A
S LVAE I
S NI I CAE
S p., 1 e 201
基 于 邻 近 相 关 图 像 和 决 策 树 分 类 的 森 林 景 观 变 化 检 测
基于高光谱遥感数据的森林树种分类
基于高光谱遥感数据的森林树种分类基于高光谱遥感数据的森林树种分类是一种利用高光谱遥感技术识别和区分不同森林树种的方法。
高光谱遥感技术可以提供丰富的高频地物光谱信息,为树种分类提供了更多的特征信息,从而提高了树种分类的精度。
以下是一种基于高光谱遥感数据的森林树种分类的步骤:1.数据采集:使用高光谱遥感技术,如Hyperion高光谱影像,获取森林区域的高频地物光谱信息。
同时,收集森林树种的分布信息,以了解不同树种的分布情况。
2.数据预处理:对采集的高光谱数据进行预处理,如辐射定标、大气校正、图像融合等,以提高数据的质量和精度。
3.特征提取:从预处理后的高光谱数据中提取与森林树种相关的特征信息,如光谱曲线、谱角映射等。
这些特征可以反映不同树种的光谱差异,为后续的树种分类提供依据。
4.分类模型构建:利用提取的特征信息,构建适合森林树种分类的模型。
常用的分类模型包括支持向量机(SVM)、随机森林(RF)、神经网络等。
5.树种分类:将构建好的分类模型应用于高光谱遥感数据,对森林中的各个像元进行树种分类。
根据分类结果,可以得出不同树种在森林中的分布情况。
6.结果验证:对分类结果进行精度验证,常用的方法包括混淆矩阵、Kappa系数、总体精度等。
如果精度不满足要求,需要对模型进行调整和优化,以提高分类精度。
7.应用分析:根据分类结果,可以进行一系列的应用分析,如森林资源调查、生态效益评估、林火监测等。
这些分析可以为林业管理和环境保护提供重要的参考依据。
总之,基于高光谱遥感数据的森林树种分类是一种利用遥感技术实现森林资源调查和生态环境监测的重要手段。
通过提取和分析高光谱数据中的特征信息,可以实现对森林树种的精细分类,为林业管理和环境保护提供更加准确和全面的信息支持。
基于决策树的分类方法在土地利用分类中的应用
基金项 目:科技部对欧合作专项一I n t e g r a t e d g e o - s p a t i a l i n f o r ma t i o n t e c h n o l o g y a n d i t s a p p l i c a t i o n t o r e s o u r c e a n d e n v i r o n m e n t a l m a n a g e m e n t t o wa r d s t h e G E O S S( 面向G E O S S 的应 用于资源环境管理的地理空间信息技术综合 ( 2 4 7 6 0 8 资助 )
基于决策树的分类方法在土地利用分类中的应用
王 光 远 福 建 师 范 大 学地 理 科 学 学 院 3 5 0 1 0 8
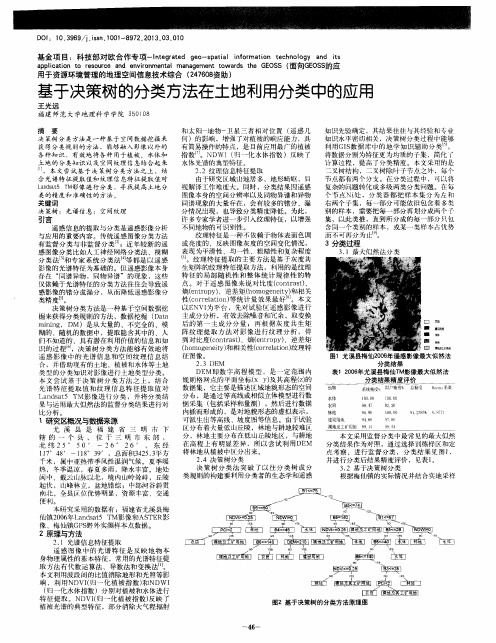
摘 要 决策树 分 类方 法是一 种基 于 空间 数据 挖 掘来 获得 分类规 则 的方 法 .能够 融八影像 以外 的 各种知 识 ,有 效地将各 种 用 于植 被 、 水体和 土地 的 分类知识 以 及 空间纹理 信 息结合 起 来 … 本 文尝 试 基于 决 策树 分 类方 法之 上 ,结 合 光 谱特征 提取 值和 纹理 信 息特征 提取 值 对 L a n d s a t 5 T M 影像 进行 分 类 ,寻 找提 高 土地 分 类的精 度和 准确 性 的方 法 。 关 键词 决 策树 ;光谱信 息物 一 卫星 三 者 相对 位 置 ( 遥感 几 何 )的影响 ,增 强 了对植 被的 响应 能力 ,具 有 简 易操作 的特 点 ,是 目前应 用最 广的 植被 指 数 。ND W I( 归 一化 水 体 指数 )反映 了 水体 光谱的 典型 特征 。 2 . 2纹 理信 息 特征提 取 由于研 究 区域 山地 居 多 ,地形 崎岖 , 目 视解 译工作 难 度大 。同 时 ,分 类结 果 因遥感 图像 本身 的空 间分辨 率 以及 同物异 谱和 异物 同谱 现象 的大量 存 在 ,会有较 多 的错分 、漏 分情 况 出现 ,也 导 致分 类精 度降低 。为此 , 引言 许 多专家学 者进 一 步 引入 纹理 特征 ,以 增强 遥感 信息 的提取 与分 类 是遥 感影 像分析 不 同地物 的可 识 别性 。 纹理 特征 是一 种不 依赖 于物 体表 面色调 与应 用的 重要 内容 。传 统遥 感 图像分 类方法 有监 督 分类 与 非监 督 分类 ;近 年较 新 的 遥 或 亮度 的 、反映 图像灰 度的 空 间变化 情况 , 感 图像分 类 比如人 工神 经 网络分 类法 、模糊 表现 为平 滑性 、均 一性 、粗 糙性 和 复杂程 度 ” 纹 理 特征 提取 的 主要 方 法是 基 于灰 度 共 分 类法 和 专 家 系统 分 类 法” 等 都 是 以 遥 感 影像 的光 谱特 征 为基础 的 。但遥 感影 像本 身 生矩 阵 的纹理 特征 提取 方法 ,利 用的 是纹理 存在 “ 同谱异 物 ,同物 异谱 ”的 现象 ,这 些 特 征 的 局 部 随 机 性 和 整 体 统 计规 律 性 的 特 c o n t r a s t ) 、 仅依 赖于 光谱 特征 的分 类方 法往 往会 导致 遥 点 。 对于 遥 感 图 像来 说 对 比度 ( e n t r o p y ) 、逆差 矩( h o mo g e n e i t y ) 和 相 关 感影 像的 错分 或 漏分 ,从而 降 低遥 感影像 分 熵 ( N i ( c o r r e l a t i o n ) 等 统 计 量效 果 最 好 。本 文 类精 度 。 NVI 为 平 台 ,先对 试 验 区 遥感 影像 进 行 决策 树分 类 方法是 一 种基于 空 间数据 挖 以E 掘来 获得 分类 规 则的方 法 ,数据 挖掘 ( D a t a 主成分 分析 ,有 效去 除噪音 和 冗余 ,取 变换 mi n i n g ,D M )是 从大 量的 、不 完全 的 、模 后的 第 一 主成 分 分 量 ;再 根 据 灰 度 共 生 矩 糊 的 、随 机 的数 据 中 ,提取 隐 含其 中的 、人 阵 纹 理 提 取 方 法 对 影 像 进 行 纹 理 分 析 ,得 c o n t r a s t ) 、熵( e n t r o p y ) 、逆差 矩 们 不知 道的 、具 有潜 在利 用价值 的信 息和 知 到对 比度 ( h o mo g e n e i t y ) i  ̄ I I } N 关性 ( c o r r e l a t i o n ) 纹 理特 识 的过 程 ,决 策树 分 类 方法 能够 有 效地 将 ( 遥 感 影 像 中 的光 谱 信 息 和 空 间纹 理 信 息 结 征 图像 。 合 ,并 借 助现 有的 土地 、植被 和 水体等 土地 DE MR I 1 数 字 高 程模 型 ,是 一 定 范 围 内 类 型 的分 类知识 对影 像进 行 上地 类型分 类 。 x y ) 及 其高 程 ( z ) 的 本 文 尝试 基 于决 策树 分类 方法 之 上 ,结 合 规 则格 网 点的 平面 坐标 ( 光 谱特 征 提 取值 和纹 理 信 息特 征 提 取 值 对 数据 集 ,它主 要是描 述 区域 地貌 形态 的空 间 L a n d s a t i f TM影 像进 行 分 类 ,并 将 分 类结 分 ,是 通过 等高 线或 相似 立体 模型进 行数 包括 采样 和量 测 ) ,然 后进 行数据 果 与运 用最 大似 然 法的 监督 分类 结果进 行对 据采 集 ( 内插 而形 成 的 ,是 对地 貌形 态的 虚拟表 示 , 比分 析 。 可派 生 出等高 线 、坡 度图等 信 息 。由于试验 1研究区概况与数据来源 尤 溪 县 是 福 建 省 三 明 市 下 区分布 着大 量低 山丘 陵 ,林 地与 耕地 较难 区 分 ,林地 主 要分 布在 低 山丘 陵地 区 ,与耕 地 辖 的 一 个 县 ,位 于 j 明 市 东 部 , M 北 纬 2 5。 5 0 一2 6。 2 6 , 东 经 在 高 程 上 有 明显 差 异 ,所以 尝 试 利 用DE l l 7 。4 8 ~l l 8 。3 9 ,总 面积 3 4 2 5 . 3 平 方 将 林地 从植 被 中区分 出来 。 2 . 4 决 策树 分类 千米 ,属 中亚 热带 季风 性湿 润 气候 。夏季 暖 决 策 树 分 类法 突破 了以 往 分 类 树 或 分 热 ,冬季 温凉 ,春 夏 多雨 ,降水 丰富 。地 处 闽 中 、戴 云 山脉 以北 ,境 内 L L I 岭 耸峙 ,丘 陵 类 规 则的构 建要 利用 分类者 的生 态学 和 遥感
纹理信息CART决策树祁连山区森林植被面向对象分类

纹理信息CART决策树祁连山区森林植被面向对象分类森林植被的遥感影像分类对森林生态系统演化及森林健康生长状况具有重要的意义。
本研究应用GIS技术,利用Landsat OLI影像结合基于纹理信息CART 决策树分类方法,系统对祁连山区的森林植被进行了分类。
分类结果表明:(1)在基于纹理信息的CART决策树分类过程中,训练样本的选择对分类结果精度影响显著;(2)基于纹理信息的CART决策树面向对象分类,利用Land蛆t OLI 影像分类森林植被类型,取得了较好的精度结果,总体精度为98.0866%,Kappa 系数为0.7517;(3)中低分辨率的影像对于分类结果精度的判定还存在一定的局限性,且CART决策树分类方法中对象特征的选择是信息提取的关键,如何选择对分类结果有决定作用的特征空间进行分类等问题也需要进一步研究。
标签:纹理信息;CART决策树;森林遥感分类;祁连山区传统的遥感影像分类方法没能充分利用遥感影像的纹理、细节等信息,而面向对象的遥感影像分类提取处理单元是有意义的像元簇之间相互关系,而不是单个像元[1]。
Johansen等利用面向对象分类的方法结合纹理信息提取QuickBird影像中森林植被信息,结合纹理信息得到较好的分类效果并具有较高的分类精度[2]。
张连华等对决策树在TM影像分类中的影响因素进行了系统分析,结果表明多种参数波段的选择可以有效的提高分类精度[3]。
基于决策树的遥感影像分类结果远高于常规的监督分类方法,而常规的决策树一般根据经验和人工目视解译设定,受人为主观影响较大,而CART(Classification andRegression Tree)算法可按照一定的算法自动分类特征确定节点阈值,能处理其他算法不能处理的非数值型数据,是决策树模型的典型代表[4]。
本文以Landsat OLI影像为数据源,对祁连山区森林植被采用基于纹理信息的CART决策树分类,将为该区域森林植被的蓄积量、生物量、碳储量等估算提供数据基础,为祁连山区森林植被时空演化过程研究提供科学参考。