数字移相器MAPS-010163
SONY 高清晰度数字磁带录像机 HDW-2000 HDW-M2000 HDW-M2000P 说明书

美国用户须知
本设备经检测符合 FCC(美国通信委员会)规范第 15 部分中规定 的 A 级数字设备的限制参数。 当本设备商用时, 上述限制参数设计 用于防止设备受到有害干扰。 本设备产生、 使用并能够辐射出高频 能量, 如果不按照本操作手册的要求安装与使用, 可能会对无线电 通信设备造成有害干扰。在居民区使用本设备,会产生有害干扰, 需要用户自行消除。 注意, 进行本操作手册中任何未明确批准的变更或改动会, 可能会 无法使用本设备。 本操作手册中推荐的接口屏蔽电缆, 必须与本设备配套使用, 才能 使其符合 FCC(美国通信委员会)规范第 15 部分 B 节中规定的 A 级数字设备的限制参数。
3-1-1 与数字设备的连接 ...................................................................................... 3-1
3-2 基准同步信号 ............................................................................................. 3-2
第4章 录制与重放
4-1 录制 ............................................................................................................. 4-1
4-1-1 录制准备工作 .............................................................................................4-1 4-1-2 录制时间码与用户比特 ............................................................................... 4-2 4-1-3 录制步骤 .................................................................................................... 4-4
360°模拟移相器平衡插入损耗和拓宽频带的研究

360°模拟移相器平衡插入损耗和拓宽频带的研究
刘克;田小建;衣茂斌;刘悦
【期刊名称】《微波学报》
【年(卷),期】2000(16)5
【摘要】本文论证了用电阻补偿法平衡360°模拟移相器插入损耗波动的正确性 ,并推导出确定移相器频带宽度的目标函数 ,籍 CAD给出移相器在最大带宽条件下的有关设计参量 ,通过直观曲线为选择变容二极管作理论依据。
采用微波集成电路工艺制作的模拟移相器在 1.3~ 2 .1GHz范围内可获得360°连续可变相移 ,最大调相电压 18V,中心频率线性度优于± 2 .5% ,插入损耗波动小于 3d B。
【总页数】5页(P624-627)
【关键词】频带;插入损耗波动;线性移相;模拟移相器
【作者】刘克;田小建;衣茂斌;刘悦
【作者单位】集成光电子国家重点联合实验室吉林大学实验区;石家庄电子工业部第十三研究所
【正文语种】中文
【中图分类】TN623
【相关文献】
1.C波段反射型线性360°模拟移相器的设计 [J], 谢萍;邓军;田小建
2.宽频带L波段360°模拟信号移相器的设计 [J], 刘克;田小建;刘悦;衣茂斌
3.宽频带360度电控移相器 [J], 蒋依群;蒋君章
4.抵损耗360°X波段模拟移相器 [J], Upsh.,JI;范进先
5.X波段360°模拟移相器的设计 [J], 冷家波
因版权原因,仅展示原文概要,查看原文内容请购买。
基础地理信息数字产品(内容标准)-1-10000数字正射影像(DOM)生产技术

而在动态(即飞行状态)没有像移补偿装置的情况下,航摄影像的实际分辨率R″大约只有25 lp/mm,在20~25μm之间,而彩红外或自然航片约为30~35μm。
一般认为,为了不因扫描而降低航片的影像质量,扫描分辨率最好采用航片实际分辨率的1/2,即黑白航片约为12μm,彩色航片约为18μm,否则一味提高扫描分辨率将毫无意义。
本规定适用于基础地理信息数据中1:10000数字正射影像的采集与建库,其它以正射影像为基础的复合地图产品的制作、或是基于其它影像类型制作DOM,可参照其有关部分执行。
2 引用标准
下列标准所包含的条文,通过在本规定中引用而构成为本规定的条文。在本规定出版时,所示版本均为有效。所有标准都会被修订,使用本规定的各方应探讨使用下列标准的最新版本的可能性。
一般方法是:选择一片中代表低密度与高密度的两个样区,使其影像灰度在0—255之间进行线性变换(单段或多段),同时灰度直方图基本呈正态分布。随机抽样检测,控制灰度值为0和255处的像元数一般不大于10。反复调试二、三次基本即可满足要求。
参数调好后,采用较低分辨率快速扫描一遍,检验其结果是否达到要求。
同一航线或整个摄区如果影像色调基本一致,可采用首片、尾片中间一片进行测试,如果相近取中数作为共同的扫描参数使用。否则应分区、分段甚至分片调整其灰度直方图。
1)控制点文件
—一般以区域网加密的范围建立公用的控制点文件。包括该区域内的外业控制点和内业加密点。
—控制点文件为ASCⅡ码文本文件,一点一行,依序排列为:
—有无影像缺陷,如云层覆盖、投影像差导致的影像死区等。
2)飞行质量及其参数
飞行方向,航偏角,航线弯曲,像片倾斜角,航向、旁向重叠,航摄比例尺航高。
3)摄影时间等。
DMK 33GP1300e 相机技术手册说明书

技术细节1.要件速览 42.尺寸图 6 2.1DMK 33GP1300e 带脚架适配器的C型接口 (6)2.2DMK 33GP1300e 不带脚架适配器的C型接口 (7)2.3DMK 33GP1300e 带脚架适配器的CS型接口 (8)2.4DMK 33GP1300e 不带脚架适配器的CS型接口 (9)3.I/O 连接器 10 3.16-pin I/O 连接器 (10)3.1.1TRIGGER_IN (10)3.1.2STROBE_OUT (11)4.光谱特征 124.1光谱灵敏度 - P1300 (12)5.相机控制 13 5.1传感器读出控制 (13)5.1.1像素格式 (13)5.1.1.18-Bit Monochrome (13)12-Bit Packed Monochrome (13)5.1.1.25.1.1.316-Bit Monochrome (14)5.1.2分辨率 (14)5.1.3读出模式 (14)5.1.4帧速率 (15)5.1.5局部扫描偏移 (16)5.2图像传感器控制 (16)5.2.1曝光时间 (17)5.2.2增益 (17)5.3自动曝光及增益控制 (17)5.3.1自动曝光 (18)自动增益 (18)5.3.25.3.3自动参考值 (18)5.3.4强光缩减 (18)5.3.5自动曝光限制 (19)5.3.6自动增益限制 (19)5.4触发 (20)5.4.1触发模式 (20)5.4.2触发极性 (20)5.4.3软件触发 (21)5.4.4触发脉冲计数 (21)5.4.5触发源 (21)5.4.6触发重叠 (22)5.5触发定时参数 (22)5.5.1触发延迟 (22)5.5.2触发去抖时间 (22)5.5.3触发遮罩时间 (23)5.5.4触发噪声抑制时间 (23)5.6数字I/O (23)5.6.1通用输入 (23)5.6.2通用输出 (24)5.7频闪 (24)5.7.1频闪启用 (24)5.7.2频闪极性 (25)频闪操作 (25)5.7.35.8图像处理 (25)5.8.1伽玛 (25)5.8.2查找表 (25)5.9自动功能感兴趣的区域 (26)5.9.1自动功能ROI启用 (27)5.9.2自动功能ROI预设 (27)5.9.3自动功能ROI自定义矩形 (27)5.10用户设置 (28)5.10.1用户设置选择器 (28)5.10.2加载用户设置 (29)5.10.3保存用户设置 (29)5.10.4默认用户配置 (29)5.11精确时间协议 (29)5.11.1PTP 启用 (29)5.11.2PTP 状态 (30)5.12动作调度器 (30)5.12.1功能选择 (30)5.12.2预定动作时间 (30)5.12.3预定动作间隔 (31)5.12.4预定动作执行 (31)5.12.5预定动作取消 (31)5.13事件 (31)配置事件 (32)5.13.15.13.2事件通知 (32)5.13.3曝光结束事件 (32)5.13.4帧触发丢失事件 (33)5.13.5L ine1 下降沿事件 (33)5.13.6L ine1 上升沿事件 (33)5.13.7测试事件 (34)6.R e v i s i o n H i story 351要件速览2尺寸图2.1DMK 33GP1300e 带脚架适配器的C型接口2.4DMK 33GP1300e 不带脚架适配器的CS型接口3I/O 连接器3.16-pin I/O 连接器相机后视图1开极闸M OS F E T最大限制0.2A(ID)!2启动电流最低条件3.5 m A!3 G:地O:输出I:输入3.1.1TR IGG ER_I NTRIGGER_IN线可用于将曝光时间的开始与外部事件同步。
数字移相原理
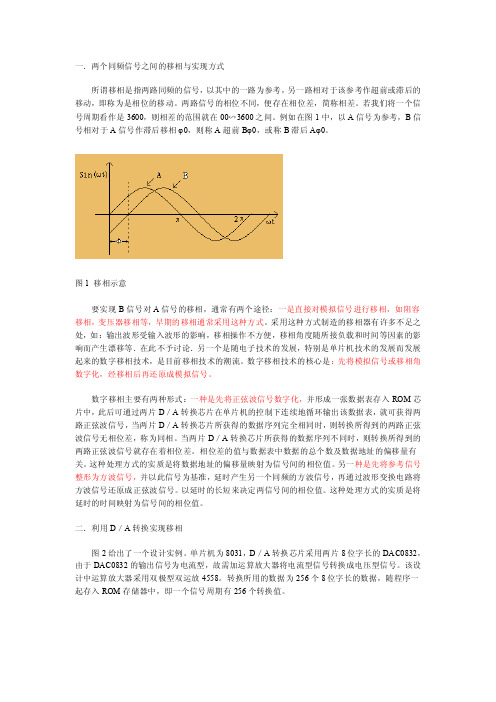
一.两个同频信号之间的移相与实现方式所谓移相是指两路同频的信号,以其中的一路为参考,另一路相对于该参考作超前或滞后的移动,即称为是相位的移动。
两路信号的相位不同,便存在相位差,简称相差。
若我们将一个信号周期看作是3600,则相差的范围就在00∽3600之间。
例如在图1中,以A信号为参考,B信号相对于A信号作滞后移相φ0,则称A超前Bφ0,或称B滞后Aφ0。
图1 移相示意要实现B信号对A信号的移相,通常有两个途径:一是直接对模拟信号进行移相,如阻容移相,变压器移相等,早期的移相通常采用这种方式。
采用这种方式制造的移相器有许多不足之处,如:输出波形受输入波形的影响,移相操作不方便,移相角度随所接负载和时间等因素的影响而产生漂移等.在此不予讨论.另一个是随电子技术的发展,特别是单片机技术的发展而发展起来的数字移相技术,是目前移相技术的潮流。
数字移相技术的核心是:先将模拟信号或移相角数字化,经移相后再还原成模拟信号。
数字移相主要有两种形式:一种是先将正弦波信号数字化,并形成一张数据表存入ROM芯片中,此后可通过两片D/A转换芯片在单片机的控制下连续地循环输出该数据表,就可获得两路正弦波信号,当两片D/A转换芯片所获得的数据序列完全相同时,则转换所得到的两路正弦波信号无相位差,称为同相。
当两片D/A转换芯片所获得的数据序列不同时,则转换所得到的两路正弦波信号就存在着相位差。
相位差的值与数据表中数据的总个数及数据地址的偏移量有关。
这种处理方式的实质是将数据地址的偏移量映射为信号间的相位值。
另一种是先将参考信号整形为方波信号,并以此信号为基准,延时产生另一个同频的方波信号,再通过波形变换电路将方波信号还原成正弦波信号。
以延时的长短来决定两信号间的相位值。
这种处理方式的实质是将延时的时间映射为信号间的相位值。
二.利用D/A转换实现移相图2给出了一个设计实例。
单片机为8031,D/A转换芯片采用两片8位字长的DA C0832,由于DAC0832的输出信号为电流型,故需加运算放大器将电流型信号转换成电压型信号。
数码相机求像主点偏移方法

-0.000000000000000324
K2(1/MM 4)
-1.15971E-17
P1(1/XS 2)
-0.000000022716508913
P1(1/MM 2)
7.88054E-10
P2(1/XS 2)
-0.000000042711366258
P2(1/MM 2)
-2.84131-10
17.82250-17.925000912 = -0.102500912
11.85168-11.950000608 = -0.098320608
两套参数坐标:
Y以像素为单位以毫米为单位(可直接在JX4上使用)
JC4 camera
像片大小:4368 xs *2912 xs像片大小154.09cm*102.73cm
传感器尺寸:35.8×23.9mm
23.9mm/4368xs=0.008207418(mm/xs)像素大小
相机参数如上。
计算法1
1.)先求出像素大小,
佳能deos5d相机校验主距像素43230986主距毫米3548148主点像素x021715125主点毫米x01782250y014440210y01185168畸变系数k11xs20000000005098555713畸变系数k11mm2106692e10k21xs40000000000000000324k21mm4115971e17p11xs20000000022716508913p11mm2788054e10p21xs20000000042711366258p21mm228413110两套参数坐标
2.)在计算出影像中心距离主点偏移相差多少个像素
3.)用其结果乘以像素大小即得到真实的偏移量(主要是转换单位)
数字移相器MAPS-010163

Rev. V4
Electrical Specifications: Freq. = 1.4 - 2.4 GHz, TA = 25°C, Z0 = 50 Ω, VCC = +5.0 V, VEE = -5.0 V
Parameter
Operating Power 3
Insertion Loss (Any Phase State)
Test Conditions 1.4 - 2.4 GHz
Any Phase State
Units dBm
dB
Min. —
—
Typ. —
5
Max. +25
6
Attenuation Variation
Across All Phase States
dB
—
± 0.8
—
RMS Attenuation Error 4
typical. Mechanical outline has been fixed. Engineering samples and/or test data may be available. M/A-COM Technology Solutions Inc. and its affiliates reserve the right to make
2
ADVANCED: Data Sheets contain information regarding a product M/A-COM Technology Solutions • North America Tel: 800.366.2266 • Europe Tel: +353.21.244.6400
is considering for development. Performance is based on target specifications, simulated results, and/or prototype measurements. Commitment to develop is not guaranteed. PRELIMINARY: Data Sheets contain information regarding a product M/A-COM Technology
mapgis地图扫描与图像处理
第二章地图扫描与图像处理从本章开始,我们即将按照数据采集的一整套流程系统的进行讲解。
本章主要内容是数据采集的前期预处理部分,我们从一张纸质地图入手,介绍如何将纸质地图变成存储在计算机中的栅格地图(即地图扫描)以及扫描后栅格地图的图像处理,最终的地图作为GIS数据采集的数据源。
通过本章的学习,能够学会用工程扫描仪扫描大幅面纸质地图,熟练使用图像处理软件简单处理栅格地图。
2.1 地图扫描2.1.1 概述GIS数据有一个很重要的来源是纸质地图,而纸质地图需要转换成计算机能识别的栅格地图才能用GIS软件进行矢量化,我们必须借助于扫描仪才能完成纸质地图转换成栅格地图的过程。
由于GIS所涉及到的纸质地图大多数幅面较大,所以在GIS地图扫描中主要应用工程扫描仪来解决此类问题。
本节主要介绍工程扫描仪的相关性能指标及其应用。
2.1.2工程扫描仪的主要性能指标1、分辨率分辩率指的是每英寸上所能容纳的颜色点数量。
在一个固定的平面内,分辨率越高,意味着可使用的点数越多,图像越细致。
工程扫描仪的分辨率主要有三种:光学分辨率、机械分辨率和插值分辨率。
光学分辨率是衡量扫描仪感光元器件精密程度的参数。
其定义是:在横方向上,每英寸距离内,感光元器件所能获取的最多真实像素数。
光学分辨率代表扫描的真实精度。
机械分辨率是衡量扫描仪传动机构工作精密程度的参数。
定义是:在纵方向上,扫描头每移动1英寸,步进电机所走过的最多步数。
例如:扫描仪参数:600×1200dpi ,600dpi即是光学分辨率,1200dpi即是机械分辨率。
插值分辨率:是指在真实的扫描点基础上插入一些点后形成的分辨率。
因为插值分辨率毕竟是生成的点而不是真实扫描的点,所以,虽然提高分辨率增加了图像的细致率,但细节上跟原来的图形会有一定程度的差异,并不代表扫描的真实精度。
而光学分辨率虽然数值较小,但它代表扫描的真实精度。
2、灰度级灰度级是表示灰度图像的亮度层次范围的指标,灰度级数越多表示扫描图像的亮度范围越大,层次越丰富。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.6 Degree Bit 11.2 Degree Bit 22.5 Degree Bit 45 Degree Bit 90 Degree Bit 180 Degree Bit Sum of All Bits
—
± 0.5
—
—
± 0.3
—
—
±2
—
deg
—
± 2.5
—
—
±3
—
—
±4
—
—-
±4
—
VSWR
The MAPS-010163 is ideally suited for use where high phase accuracy with minimum loss variation over the phase shift range are required. The 4 mm PQFN package provides a smaller footprint than is typically available for a digital phase shifter with an internal driver. Typical applications include communications antennas and phased array radars.
is considering for development. Performance is based on target specifications, simulated results, and/or prototype measurements. Commitment to develop is not guaranteed. PRELIMINARY: Data Sheets contain information regarding a product M/A-COM Technology
typical. Mechanical outline has been fixed. Engineering samples and/or test data may be available. M/A-COM Technology Solutions Inc. and its affiliates reserve the right to make
Test Conditions 1.4 - 2.4 GHz
Any Phase State
Units dBm
dB
Min. —
—
Typ. —
5
Max. +25
6
Attenuation Variation
Across All Phase States
dB
—
± 0.8
—
RMS Attenuation Error 4
Absolute Maximum Ratings 5,6
Ordering Information 1
Part Number MAPS-010163-TR0500
Package 500 piece reel
MAPS-010163-001SMB
Sample Test Board
1. Reference Application Note M513 for reel size information.
• India Tel: +91.80.43537383
• China Tel: +86.21.2407.1588
Visit for additional data sheets and product information.
Solutions has under development. Performance is based on engineering tests. Specifications are
RF IN RF OUT
Ratio
— —
1.5:1 1.5:1
— —
1 dB Compression
Reference State
dBm
—
25
—
Input IP3
Two-tone inputs up to +5 dBm
dBm
—
40
—
TRISE, TFALL
10% to 90% RF, 90% to 10% RF
All Values Relative to Insertion Loss at Reference Phase
dB
—
0.4
—
RMS Phase Error 4
All Values Relative to Reference Phase deg
—
3
—
Phase Accuracy Relative to Reference Loss State
• India Tel: +91.80.43537383
• China Tel: +86.21.2407.1588
Visit for additional data sheets and product information.
Solutions has under development. Performance is based on engineering tests. Specifications are
14
RF OUT
3
GND
15
GND
4
GND
16
GND
5
RF IN
17
SER OUT
6
GND
18
VCC
7
GND
19
D6
8
GND
20
D5
9
GND
21
D4
10
GND
22
D3 or LE
11
GND
23
D2 or CLK
12
GND
24
D1 or SER IN
2. The exposed pad centered on the package bottom must be connected to RF and DC ground.
* Restrictions on Hazardous Substances, European Union Directive 2002/95/EC.
1
ADVANCED: Data Sheets contain information regarding a product M/A-COM Technology Solutions • North America Tel: 800.366.2266 • Europe Tel: +353.21.244.6400
ns
—Leabharlann 50—VCC VEE VIL VIH
lIN (Input Control Current)
VOH VOL Icc (Quiescent Supply Current)
— — LOW-level input voltage HIGH-level input voltage
VIN = VCC or GND For serial out; IOH = -100 µA For serial out; IOL = 100 µA
Rev. V4
Electrical Specifications: Freq. = 1.4 - 2.4 GHz, TA = 25°C, Z0 = 50 Ω, VCC = +5.0 V, VEE = -5.0 V
Parameter
Operating Power 3
Insertion Loss (Any Phase State)
typical. Mechanical outline has been fixed. Engineering samples and/or test data may be available. M/A-COM Technology Solutions Inc. and its affiliates reserve the right to make
Commitment to produce in volume is not guaranteed.
changes to the product(s) or information contained herein without notice.
MAPS-010163
Digital Phase Shifter 6-Bit, 1.4 - 2.4 GHz
MAPS-010163
Digital Phase Shifter 6-Bit, 1.4 - 2.4 GHz
Features
6 Bit Digital Phase Shifter 360° Coverage with LSB = 5.6° Integral CMOS Driver Serial or Parallel Control Low DC Power Consumption Minimal Attenuation Variation over Phase Shift
Vcntrl = VCC or GND
V
3.0 -5.5
— -5.0
5.5 -3.0
V
0.0 0.7 x VCC
— —
0.3 x VCC VCC
µA
—
1
—
V
VCC - 0.2 —
— —
— 0.2
µA
—
—
2
IEE
VEE min to max Vin = VIL or VIH
mA
-1.0
-0.1
—
3. Maximum operating power is the maximum power where the specifications are guaranteed. 4. RMS is calculated across all 63 amplitude or phase states relative to the amplitude or phase in the 0° phase state at a given frequency.