帧同步移动平滑处理
第七章 移动通信网

(8) F接口
MSC与EIR间的接口 用于交换相关的IMEI管理信息
(9) G接口
VLR间的接口 用于在采用 TMSI 的 MS 进入新的 MSC/VLR 服务区域 时向分配TMSI的VLR询问此移动用户的IMSI信息
28
7.2 系统结构
4 网络区域划分 PLMN 的网络覆盖区域划分如图 7-2 所示,按从 小到大的顺序,包括下列各组成区域。
为了对IMSI保密,IMSI仅在空中传送一次,便由VLR 给来访移动用户分配一个惟一的TMSI号码替代
仅在本地有效 ,当用户离开此VLR服务区后释放
由VLR临时分配
(4)移动用户漫游号码MSRN
用于在呼叫时为移动用户选路 VLR临时分配 ,接续完成后即释放
在被访VLR区域内是惟一有效的
40dB。
阴影衰落:当移动台通过不同障碍物的阴影时,
就造成接收场强中值的变化。这种由于阴影效应
导致接收场强中值随着地理位臵改变而出现的缓 慢变化。 自由空间传播损耗:与距离的平方成正比。
7
7.1 移动通信概述
4 移动通信的种类 (1) 集群移动通信 (2) 公用移动通信系统
(3) 卫星移动通信
7.2 系统结构
5 编号计划 (2)国际移动用户识别码IMSI
用于在国际上唯一识别移动用户,国际统一 开户时写入SIM卡 移动用户以此号码发起入网请求和位臵登记 结构(15位):如图所示 我国MCC为460 MNC的值中国移动为00、中国联通为01
34
7.2 系统结构
5 编号计划 (3)临时移动用户识别码TMSI
12
7.2 系统结构
2 网络功能实体 (2)基站系统BSS
flexscan S2031w S2431W 彩色液晶显示器 说明书
警告
将设备安置在坚固稳定的地方。 如果设备放在不恰当的平面上,则设备可能会跌落并导致人身伤害或设备损坏。 如果设备跌落,请立即切断电源并咨询您的经销商。切勿继续使用已损坏的设备。使 用已损坏的设备可能会导致火灾或触电。 请将设备放置在适宜的场所。 否则可能会导致火灾、触电或设备损坏。 • 切勿放在室外。 • 切勿放置在运输工具中 ( 船、飞机、火车、汽车等 )。 • 切勿放置在多尘或潮湿的场所。 • 切勿放置在蒸汽会直接接触屏幕的场所。 • 切勿放置在供暖设备或增湿器附近。 为避免出现窒息的危险,请将塑料包装袋放在远离婴儿和儿童的地方。 请使用附带的电源线,并连接到当地的标准电源插座。 务必在电源线的额定电压范围内使用。 否则可能会导致火灾或触电。 若要断开电源线,请抓紧插头并拔出。 拉址电源线可能会使其受损,从而导致火灾或触电。
作为 ENERGY STAR® 的合作伙伴,EIZO NANAO CORPORATION 确认本产品符合能源效率 ENERGY STAR 标准。
根据销售地区不同,产品规格可能也会变化。 请在以购买所在地区语言编写的手册中确认规格。
预防措施
重要
• 为配合在销售目标区域使用,本产品已经过专门调整。如果产品使用地并非销售目标区域,则本产品的工 作性能可能与规格说明不符。
预防措施 3
注意
搬动设备时,请务必小心。 移动设备时,请断开电源线和电缆。在电源线保持连接时移动设备是非常危险的。因 为这样可能会导致人身伤害。 在搬动设备时,请用双手紧紧抓住设备底部,确保在抬起以前显示屏面朝外。 设备跌落可能会造成人身伤害或设备损坏。
切勿堵塞机壳的通风孔。 • 切勿在通风孔上放置任何物体。 • 切勿将设备安装到封闭空间中。 • 切勿在设备平放或上下颠倒时使用。 通风孔堵塞会造成空气流通不畅,从而可能会导致火灾、触电或设备损坏。 切勿用湿手触摸插头。 否则可能会导致触电。
帧差法
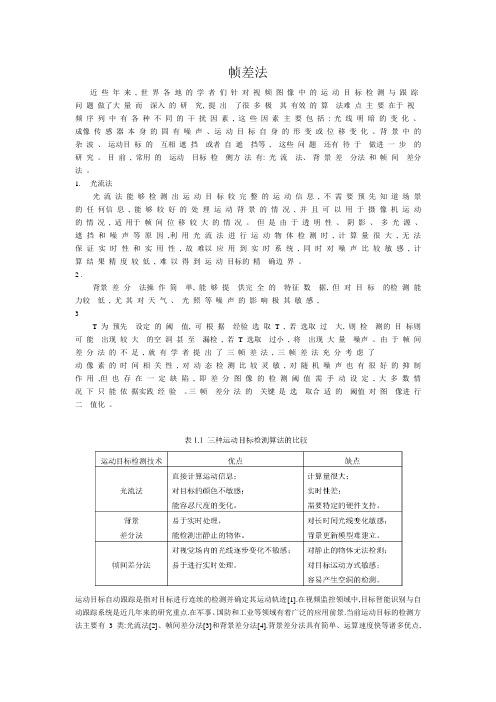
帧差法近些年来, 世界各地的学者们针对视频图像中的运动目标检测与跟踪问题做了大量而深入的研究, 提出了很多极其有效的算法难点主要在于视频序列中有各种不同的干扰因素, 这些因素主要包括: 光线明暗的变化、成像传感器本身的固有噪声、运动目标自身的形变或位移变化、背景中的杂波、运动目标的互相遮挡或者自遮挡等, 这些问题还有待于做进一步的研究。
目前, 常用的运动目标检侧方法有: 光流法、背景差分法和帧间差分法。
1.光流法光流法能够检测出运动目标较完整的运动信息, 不需要预先知道场景的任何信息, 能够较好的处理运动背景的情况, 并且可以用于摄像机运动的情况, 适用于帧间位移较大的情况。
但是由于透明性、阴影、多光源、遮挡和噪声等原因,利用光流法进行运动物体检测时, 计算量很大, 无法保证实时性和实用性, 故难以应用到实时系统, 同时对噪声比较敏感, 计算结果精度较低, 难以得到运动目标的精确边界。
2 .背景差分法操作简单, 能够提供完全的特征数据, 但对目标的检测能力较低, 尤其对天气、光照等噪声的影响极其敏感,3T 为预先设定的阈值, 可根据经验选取T , 若选取过大, 则检测的目标则可能出现较大的空洞甚至漏检, 若T 选取过小, 将出现大量噪声。
由于帧间差分法的不足, 就有学者提出了三帧差法, 三帧差法充分考虑了动像素的时间相关性, 对动态检测比较灵敏, 对随机噪声也有很好的抑制作用,但也存在一定缺陷, 即差分图像的检测阈值需手动设定, 大多数情况下只能依据实践经验。
三帧差分法的关键是选取合适的阈值对图像进行二值化。
运动目标自动跟踪是指对目标进行连续的检测并确定其运动轨迹[1].在视频监控领域中,目标智能识别与自动跟踪系统是近几年来的研究重点.在军事、国防和工业等领域有着广泛的应用前景.当前运动目标的检测方法主要有3类:光流法[2]、帧间差分法[3]和背景差分法[4].背景差分法具有简单、运算速度快等诸多优点,使得该法作为运动目标检测的基本方法被普遍采用.但该法暴露出若干问题:一种是因外部条件引起的,如对光线的变化、噪声等造成差分图像检测精度不高,甚至失效;另一种是由差分图像法本身内在局限引起的,主要有空洞[5]、拖影,以及运动目标被拉长等现象.光流法[6]虽然能够适用于静态背景和动态背景两种环境,有较好的适应性,但是其计算复杂度高,运算时间开销很大,不能满足实时性的要求.帧差法[7]比较简单,实时性高,它主要包括减背景方法和相邻帧相减法,即三帧差分法.减背景方法存在背景获取困难、受光照影响严重且更新困难等问题.三帧差分法受光照和阴影影响较小.笔者对三帧差分法进行改进,提出了一种简单有效的运动目标检测方法.1 运动目标实时跟踪系统1. 1 帧差法的基本原理帧间差分法的基本原理就是将前后两帧图像对应像素点的灰度值相减,在环境亮度变化不大的情况下,如果对应像素灰度相差很小,可以认为此处物是静止的;如果图像区域某处的灰度变化很大,可以认为这是由于图像中运动物体引起的,将这些区域标记下来,利用这些标记的像素区域,就可以求出运动目标在图像中的位置.一般采用的帧差法是在连续的图像序列[8]中2个或3个相邻帧间采用基于像素的时间差分并且阈值化来提取图像的运动区域.该运动目标实时跟踪系统是采用三帧差分来进行运动目标检测,这种方法不仅能提高运动目标检测[9]的速度,而且提高了所检测运动目标图像的完整性.均值滤波均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标象素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
IMA技术介绍

IMA技术介绍华为技术有限公司侵权必究版权所有.修订记录目录Keywords 关键词:IMA,ATM,VP/VC Ring,VCXAbstract 摘要:本文档主要介绍IMA技术的背景、技术特色以及在光网络系统中应用的可行性和技术方案给出分析,并同时给出可能的网络应用。
1 IMA技术背景和特色1.1 IMA技术背景3G业务的发展需要在光传输网络上提供3G传输解决方案。
3G通信网络是一个开放的、发展的网络,平滑演进是它的核心思想之一。
从WCDMA的演进来看,曾经和将要经历GSM?GPRS?R99?R4?R5?R6等阶段,目前处于R4/R5的阶段。
3G网络的目标是组网扁平化,传输IP化,但是当前以TDM/ATM传输比较成熟。
3G网络节点的特点是,核心层容量大、节点少,Node B 位于城市中心(百万用户),接入层以TDM/ATM传输为主,基站接入速率高于2G网络。
站址及传输设备的选择既要考虑兼容原有投资,又要考虑未来业务及协议的发展。
现阶段成熟的3G网络主要是基于ATM分组技术,RNC与NodeB之间通过ATM信元方式承载业务,应用在两年内是上升趋势,主要来自短信、上网等静态数据业务。
WCDMA的R99和R4版本都是基于ATM技术,是目前真正成熟的3G版本,因此3G网络的接入网的传输实质是ATM 如何在城域网上传输的问题,即VP-Ring和IMA。
3G基站的上行带宽是2M~8M,最大不会超过16M。
利用现有的铜缆资源,使用1根或多根电缆采用IMA方式传送E1信号,是比较好的实现方式。
STM-1和E1/T1基站的标准接口是3G.分组域:IP电路域:R99:TDM/ATM可选R4/R5:ATM/IP/TDMR6:未来IP—MPLS智能光网络ATMATMRNCIMAIMA或者ATMATM或者NodeBNodeBNodeB图1.3G的传输需求1.2 IMA技术特色IMA的特色在于解决了高速率链路和低速率链路之间的互通问题,它利用多个已有的窄带2M E1 PDH线路传送3G宽带信号,通过IMA协议在NodeB和传输节点之间实现n个E1的捆绑,发送端把一条传输链路上的ATM 信元流反向复用到多条传输链路上进行传输,在接收端把多条传输链路上过来的信元流重新汇聚成一条的信元流。
同步 原理
图7-1 平方变换法提取载波原理框图
第7章 同步原理
此方法广泛用于DSB信号的载波同步信号提取。设DSB 信号为SDSB=f(t)cosω0t,若 调制信号f(t)是不含直流的模拟基带 信号,则DSB信号里不含载波分量,利用平方律器件 将该信号 经过非线性变换后,得到
图7-6 插入导频法的接收端原理框图
第7章 同步原理
如果不考虑信道失真及噪声干扰,则接收端收到的信号 与发送端的完全相同。此信号 分为两路:一路通过带通滤波 器滤除带外噪声;另一路通过中心频率为ω0 的窄带滤波器, 获得导频Asinω0t,再 将 其 进 行 π/2 相 移,就 能 得 到 与 调 制 载 波 同 频 同 相 的 相 干 载 波 cosω0t。两路信号相乘后 再通过低通滤波器即可获得原始信号。
第7章 同步原理 2.平方环法 在实际中,由于存在信道噪声,进入接收机的信号并不是
单一的信号,因此利用平方 变换法提取出来的载波也不纯。 为了改善平方变换法的性能,可以将图7-1中的窄带滤波 器 用锁相环代替,构成平方环法,其基本原理框图如图7-2所示。
图7-2 平方环法提取载波原理框图
第7章 同步原理
第7章 同步原理
7.2.2 插入导频法 在某些载波系统中,已调信号中不含有载波分量或者含
有载波分量但很难分离出来, 如 DSB、VSB、SSB和2DPSK。 为了获取载波同步信息,也可以采用插入导频的方法。
DSB信号的插入导频频谱示意图如图7 4所示。为了便 于接收已调信号时提取导频 信息,应使插入的导频与已调信 号的频谱成分尽量分离。这时可以将导频的插入位置选取 在已调信号频谱为零的位置,而且插入的导频并不是加入调 制器的载波,而是将该载波移 π/2相的“正交载波”。
松下 AV-HS400MC切换台 说明书

X,Y定位器 电源指示灯POWER 划像模式/功能模式选择按钮 报警指示灯ALARM 母线指派按钮
切换 AUX、 KEY、 DSK 和 PinP母线交叉点按钮启用。 选择背景划像、 键图像划像或功能 (对应 于 WIPE PATTERN/FUNCTION 选择按钮) 。
10 画面显示
划像方向选择按钮 独立转场执行按钮
切换 FTB (Fade-to-Black)、 PinP 和 DSK 等 的开关 在 FTB 菜单中可以设置 KEY ON/ ; OFF 或禁用。
键/AUX 母线 交叉点按钮行
选择键/AUX 母线所切换 的母线源。
PGM/A 母线 交叉点按钮行
选择 PGM/A 母线视频信号。
传统监视器系统示例
转换操作控制杆
兼容的格式
HD/SD-SDI、 HD/SD-analog component 、 接口--实现了最多 8 路输入和 8 路输出 DVI
• 标配 4 路 HD-SDI 信号输入和 4 路 HD-SDI 信号输出1*。 • 输入/输出扩展板选件包括 : (AV-HS04M1x 2) 2) 、 最多4路HD/SD-analog component输入 AV-HS04M2×2) ( 、 输入: 1) 最多 4 路 HD-SDI/SD-SDI 输入 * 3)最多 4 路 DVI 输入2(AV-HS04M3 x 2) 选配的输入板上特别配有上变换器。 输出: 1) 最多 4 路HD/SD-analog component 输出 AV-HS04M4 x 2) ( 、 * 2) 最多 2 路 DVI 输出3( AV-HS04M5 x 2) • 输入/输出特别具有 10-bit 视频处理能力和 4:2:2 信号处理能力。 • Tally接口支持 8 路摄像机的信号灯输出。 • RS-422 兼容型控制插孔(兼容 GVG 协议)。
采购货物技术要求

显示屏发光点中心距偏差VI%(提供封面具有ILAC、CNAS.CMA标识盖章的权威检测报告证明)。
7
显示屏水平和垂直视角》170°;亮度均匀性A99%,色度均匀性ax、4Y值10.001以内(提供封面具有ILAC、CNASsCMA标识盖章的权威检测报告证明)。
8
显示屏工作状态下噪声值与前后左右环境背景噪声值相差均不超过2dB(提供封面具有ILAC、CNAS.CMA标识盖章的权威检测报告证明)。
14
14、支持非规则建屏,单卡单接口建屏,设备输出DVl和HDMl接口输出最大分辨率为2560X972或884x2560
15
15、支持异形屏配屏,多组屏幕管理,支持不规则矩形拼接,拼接不受限制。
(需要提供公安部检测机构出具的CNAS、CMAsilac-MRA的检测报告,需加盖生产厂家公章)
16
16、用户权限采用分级控制,超级管理员在设置用户登录权限时可分配用户使用权限,有效屏蔽敏感信息,确保信息安全
3D发射器
1
支持3d信号同步输出到控制设备
2
满足VESA3D信号接口
3
为保证质量效果,需要和主控系统同一厂家,并提供厂家盖章检测证明
投影机
1
投影技术:3LCD工程投影机
2
亮度》5600流明
3
液晶显板尺寸:0.64英寸X3
4
标准分辨率:1920*1200
5
灯泡:≤330W
6
标准模式下灯泡寿命级000小时(节能模式下灯泡寿命A8000小时)
7
对比度:≥20000:1
8
镜头手动位移:垂直:O-O.55V,水平:±0.15H
9
镜头变焦比/L6倍,投射比范围:(1.2-2.0):1
0.3GMSK原理
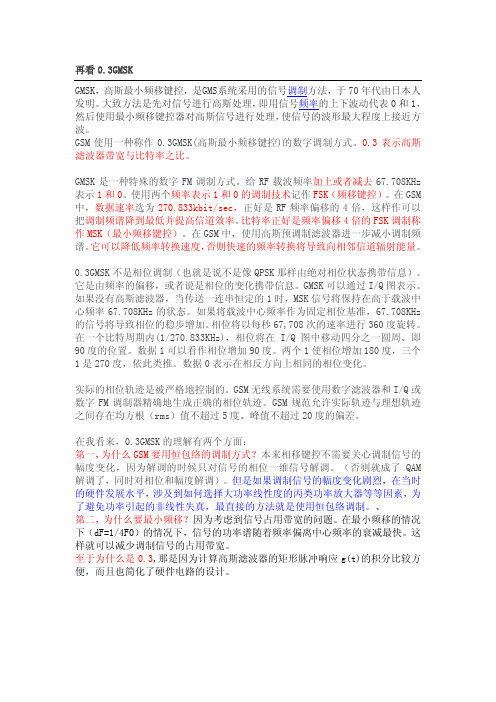
再看0.3GMSKGMSK,高斯最小频移键控,是GMS系统采用的信号调制方法,于70年代由日本人发明。
大致方法是先对信号进行高斯处理,即用信号频率的上下波动代表0和1,然后使用最小频移键控器对高斯信号进行处理,使信号的波形最大程度上接近方波。
GSM使用一种称作0.3GMSK(高斯最小频移键控)的数字调制方式。
0.3表示高斯滤波器带宽与比特率之比。
GMSK是一种特殊的数字FM调制方式。
给RF载波频率加上或者减去67.708KHz 表示1和0。
使用两个频率表示1和0的调制技术记作FSK(频移键控)。
在GSM 中,数据速率选为270.833kbit/sec,正好是RF频率偏移的4倍,这样作可以把调制频谱降到最低并提高信道效率。
比特率正好是频率偏移4倍的FSK调制称作MSK(最小频移键控)。
在GSM中,使用高斯预调制滤波器进一步减小调制频谱。
它可以降低频率转换速度,否则快速的频率转换将导致向相邻信道辐射能量。
0.3GMSK不是相位调制(也就是说不是像QPSK那样由绝对相位状态携带信息)。
它是由频率的偏移,或者说是相位的变化携带信息。
GMSK可以通过I/Q图表示。
如果没有高斯滤波器,当传送一连串恒定的1时,MSK信号将保持在高于载波中心频率67.708KHz的状态。
如果将载波中心频率作为固定相位基准,67.708KHz 的信号将导致相位的稳步增加。
相位将以每秒67,708次的速率进行360度旋转。
在一个比特周期内(1/270.833KHz),相位将在I/Q图中移动四分之一圆周、即90度的位置。
数据1可以看作相位增加90度。
两个1使相位增加180度,三个1是270度,依此类推。
数据0表示在相反方向上相同的相位变化。
实际的相位轨迹是被严格地控制的。
GSM无线系统需要使用数字滤波器和I/Q或数字FM调制器精确地生成正确的相位轨迹。
GSM规范允许实际轨迹与理想轨迹之间存在均方根(rms)值不超过5度、峰值不超过20度的偏差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
帧同步移动平滑处理
首先,让我们来看一下帧同步的概念。
在帧同步中,游戏引擎以固定的帧率运行,比如每秒60帧。
每一帧都代表了游戏世界的一个时间片段。
当玩家输入命令时,这些命令会被发送到服务器,并在下一个帧中被执行。
所有玩家都按照相同的帧率进行运行,以确保游戏状态的一致性。
移动平滑处理涉及到玩家或实体的位置和动作的流畅性。
一种常见的方法是使用插值技术,比如线性插值,来平滑地处理其他玩家或实体的移动。
这意味着在两个已知位置之间进行插值计算,以便在帧之间平滑地移动实体,使其看起来更加自然和连续。
另一个重要的考虑因素是网络延迟。
在实时多人游戏中,网络延迟是不可避免的。
为了处理这一点,可以使用预测性技术来估计其他玩家的位置,并在收到服务器更新之前先行渲染它们的移动。
这可以减少视觉上的突然跳动或抖动,从而提高游戏的流畅性。
除了插值和预测外,还有其他一些技术可以用于帧同步移动平滑处理,比如反作弊机制、状态同步和校正等。
这些技术可以确保游戏中的所有玩家都能够看到一致的游戏状态,从而提供更好的游
戏体验。
总的来说,帧同步移动平滑处理涉及到多个方面,包括帧同步、插值、预测性技术以及网络延迟的处理。
通过综合运用这些技术,
开发人员可以确保多人在线游戏或实时多人交互应用程序中的移动
是平滑且一致的,从而提供更好的用户体验。