基于矢量控制的异步电机改进模型预测控制_刘威
一种改进的空间矢量调制的异步电机直接转矩控制系统
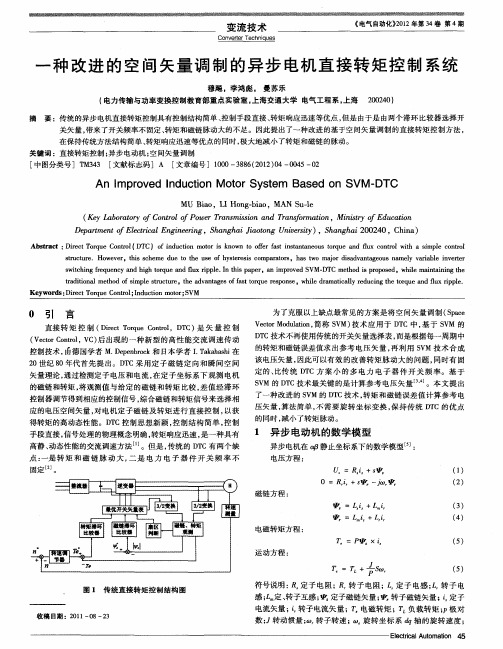
矢量理论 , 通过 检测定 子 电压 和电流 , 在定子 坐标 系下观测 电机 的磁链和转矩 , 观测值 与给 定的磁链 和转矩 比较 , 将 差值 经滞环 控制器调节得到相应 的控制信号 , 综合磁链 和转矩信 号来 选择相
应 的 电压 空 间 矢 量 , 电 机 定 子 磁 链 及 转 矩 进 行 直 接 控 制 , 获 对 以
K e wor s: rc r e Co to ;n ucin moo S y d Die tToqu n r l I d t tr; VM o
0 引 言
直接 转 矩 控 制 ( i c T ru n o,D C) e r
关键 词 :直接转矩控制 ; 异步电动机 ; 空间矢量调制 [ 中图分类号]T 4 [ M33 文献标志码 ]A [ 文章编号 ]10 3 8 (0 2 0 0 4 O 0 0— 8 6 2 1 ) 4- 0 5一 2
An I r v d Id c in Mo o s e B s d o VM- TC mp o e n u t t rSy t m a e n S o D
s u tr.H w v r hs c e ed e t te u eo y t ei c m a tr,h st oma r i d a t eu a e a a l iv r r t c e o ee ,t h m u s f s rs o p r os a j s v na o sn m l v r be n et r u is oh h e s a w oda g y i e
异步电机控制技术发展现状及未来趋势分析
异步电机控制技术发展现状及未来趋势分析引言:近年来,随着能源需求的不断增长和环境保护意识的提高,异步电机控制技术在工业和家庭领域中得到了广泛应用。
本文将对异步电机控制技术的发展现状及未来趋势进行分析,并探讨其在能源节约和环境保护方面的潜力。
一、异步电机控制技术的发展现状1. 传统的异步电机控制技术传统的异步电机控制技术主要包括启动、运行和停止等方面的控制。
其中,启动控制通过启动电流的控制实现电机的平稳启动;运行控制主要包括转速控制、负载控制和故障保护等;停止控制主要通过切断电源来停止电机的运行。
2. 先进的异步电机控制技术随着电力电子技术的发展,先进的异步电机控制技术逐渐兴起。
其中,矢量控制技术通过测量电机的电流和转子位置来实现对电机的精确控制。
矢量控制技术可以实现电机的高效运行,并在低速和高速运行时提供更好的性能。
此外,模型预测控制技术也得到了广泛应用。
模型预测控制技术通过建立电机的数学模型并预测电机的未来运行状态,从而调整控制器的输出信号,实现对电机的控制。
模型预测控制技术在响应速度和动态性能方面具有优势,可用于实现高精度的电机控制。
3. 异步电机控制技术在工业领域中的应用异步电机控制技术在工业领域中发挥着重要作用。
例如,在制造业中,异步电机控制技术可用于控制生产线上的各种设备,提高生产效率;在风电领域中,异步电机控制技术可用于控制风力发电机组的转速和负载,提高风能的利用效率;在交通运输领域,异步电机控制技术可用于控制电动汽车的驱动系统,提高能源利用率。
二、异步电机控制技术的未来趋势1. 高效能源利用未来,随着能源短缺和环境问题的不断突出,异步电机控制技术将更加注重能源的高效利用。
通过优化电机的控制算法和控制策略,减少电机的能量损耗,提高电机的能效。
同时,结合再生能源技术,推动异步电机控制技术与太阳能、风能等能源的融合,实现可持续发展。
2. 智能化和自动化随着人工智能技术和自动化技术的迅猛发展,异步电机控制技术也将朝着智能化和自动化方向发展。
异步电机无速度传感器矢量控制策略综述

基于滑模控制的自适应控制策略
总结词
滑模控制是一种非线性控制策略,其核心思 想是在控制过程中使系统的状态轨迹在预设 的滑模面上滑动,以达到预设的目标。
详细描述
在无速度传感器矢量控制中,滑模控制通常 用于估计转速和转子位置。通过设计适当的 滑模面和控制律,可以使系统的状态轨迹在 滑模面上滑动,并根据滑模面的输出估计转 速和转子位置。
基于人工智能的无速度传感器控制技术
1 2
神经网络(NN)
利用多层神经网络对电机转速进行估计,具有 较好的自适应性和鲁棒性。
支持向量机(SVM)
通过构建支持向量机分类器或回归器,实现对 电机转速的估计和控制。
3
强化学习(RL)
通过设计合适的奖励函数和策略,实现对电机 转速的优化控制。
基于信号处理的无速度传感器控制技术
无速度传感器技术的优势
无速度传感器技术能够简化系统结构,降低成本,提高可靠性,因此研究无速 度传感器矢量控制策略具有重要的实际意义。
研究现状与发展
研究现状
目前,异步电机无速度传感器矢量控制策略的研究已经取得了一定的成果,各种 控制方法不断涌现,如基于模型的控制、滑模控制、神经网络控制等。
发展方向
未来的研究将更加注重控制算法的优化和实际应用效果的验证,同时结合现代信 号处理技术和人工智能技术,进一步发展新型的无速度传感器矢量控制策略。
CHAPTER 03
无速度传感器矢量控制技术
基于模型的无速度传感器控制技术
模型预测控制(MPC)
利用电机动态模型进行预测和反馈控制,以达到良好的动态性能 。
滑模观测器(SMO)
通过设计滑模面和滑模控制器,实现对电机转速的精确估计。
扩展卡尔曼滤波(EKF)
三电平逆变器变频调速系统的研究

三电平逆变器变频调速系统的研究随着电力电子技术和微处理器技术的不断发展,三电平逆变器变频调速系统在工业领域中的应用越来越广泛。
这种调速系统具有高效率、高可靠性、节能等优点,因此受到许多行业的青睐。
本文将对三电平逆变器变频调速系统进行深入研究,旨在为其在工业控制领域中的更好应用提供理论支持和实践指导。
三电平逆变器变频调速技术是一种基于电力电子器件逆变器的高效调速方法。
其基本原理是通过改变逆变器的开关状态,控制交流电机的转速,从而实现电机的调速。
三电平逆变器相较于传统的两电平逆变器,具有更高的电压利用率、更低的谐波畸变和更好的电磁兼容性等优点。
因此,三电平逆变器变频调速系统在工业领域具有广泛的应用前景。
建立三电平逆变器变频调速系统的数学模型,包括三电平逆变器模型和交流电机模型。
通过MATLAB/Simulink进行系统仿真,探究不同参数对系统性能的影响。
结果表明,随着电机转速的增加,三电平逆变器的开关频率也相应增加,系统效率得到提高;同时,适当的调制策略能够有效降低谐波畸变和电磁干扰。
基于异步电动机和矢量控制的三电平逆变器变频调速控制策略,通过将异步电动机的定子电流分解为转矩分量和磁通分量,并分别对其进行控制,从而实现电机的精确调速。
对该控制策略进行仿真分析,结果表明该策略具有较高的控制精度和响应速度,并且在不同负载和电机参数下均表现出良好的鲁棒性。
为验证所提出控制策略的有效性和优越性,搭建了三电平逆变器变频调速实验平台,并对不同参数设置下的调速效果进行了比较。
实验结果表明,采用基于异步电动机和矢量控制的三电平逆变器变频调速控制策略的实验系统,具有更高的调速精度、更快的响应速度和更好的鲁棒性。
对比传统的两电平逆变器变频调速系统,三电平逆变器变频调速系统在效率和性能上均表现出显著优势。
通过对三电平逆变器变频调速系统的深入研究,本文成功建立了一套完整的数学模型,提出了一种基于异步电动机和矢量控制的三电平逆变器变频调速控制策略,并通过实验验证了其有效性和优越性。
改进电压模型的异步电机矢量控制系统仿真
Hu a n gQi n,L i Xi a n g f e i ,L i We n f e n g ,Ma J i a n
( S c h o o l o f E l e c t r i c a l a n d I n f o r ma t i o n E n g i n e e r i n g ,H u n a n U n i v e r s i t y o f T e c h n o l o g y ,Z h u z h o u H u n a n 4 1 2 0 0 7 , C h i n a)
d o i : 1 0 . 3 9 6 9 0 . i s s n . 1 6 7 3 — 9 8 3 3 . 2 0 1 3 . 0 1 . 0 1 2
改进 电压模型的异步 电机矢量控制 系统仿真
黄 钦 ,李祥飞 ,李 文锋 ,马 箭
( 湖南工业大学 电气与信息: 【 程学院 ,湖南 株洲 4 1 2 0 0 7)
收 稿 日期 :2 0 1 2 - 1 卜2 5
缺陷对 估计 值 的影 响 。 由于 电流模 型对 电机 转子 参数 的敏感 性 ,将 会
增加磁 链 观测 的不 准确性程 度 ,故一 般 只应 用 于低
速场合 ,实际中 ,电压模型 比电流模型应用广泛 ,但 存 在着 2个缺点 】:一是 低速场合 对定 子 电阻 变化
第2 7卷 第 1 期 2 0 1 3年 1 月
湖
南
_ l I : 业
大
学
学
报
Vo1 . 27 NO. 1
J o u r n a l o f Hu n a n Un i v e r s i t y o f T e c h n o l o g y
矢量控制系统中异步电动机参数的估算和测量
矢量控制系统中异步电动机参数的估算和测量
马小亮
【期刊名称】《电气传动》
【年(卷),期】2010(040)007
【摘要】异步电动机矢量控制系统需要电动机电阻和电感参数.介绍了在调试时,面对1台电机如何估算和测量这些参数,方法有:用电动机铭牌或样本数据估算参数,通过空载和短路实验测取参数,利用变频器测取参数及在运行中修正参数.这些方法也是设计调速系统中自调试功能的基础.
【总页数】5页(P3-7)
【作者】马小亮
【作者单位】天津电气传动设计研究所,天津,300180
【正文语种】中文
【中图分类】TM343
【相关文献】
1.异步电动机无速度传感器矢量控制系统的速度估算及参数调整问题和解决方案[J], H. Tajima
2.间接矢量控制系统中的异步电动机参数辨识 [J], 刘洋;赵金;王庆义
3.参数自调整模糊控制在异步电动机矢量控制系统中的应用 [J], 刘昆;范少泉
4.交流电动机矢量控制变压变频调速系统(七)第七讲异步电动机矢量控制系统[J], 李华德;杨立永
5.交流电动机矢量控制变压变频调速系统(八)第八讲双馈异步电动机矢量控制系统 [J], 李华德;杨立永
因版权原因,仅展示原文概要,查看原文内容请购买。
基于预测控制的异步电机矢量控制性能的优化

■技术探讨与研究TECHNIQUE RESEARCH基于预测控制的异步电机矢量控制性能的优化Optimization of Oector Control Performance of Asynchronous Motor Based on Predictive Control武汉晴川学院刘铁湘(Liu Tiexiang)张洪华(Zhang Honghua)桂林航天工业学院邹龙生(Zou Longsheng)摘要:传统的电压源逆变器异步电机的矢量控制,定子电流的控制效果直接影响矢量控制性能,且对电机的参数变换很敏感。
对此,提出了一种异步电机矢量控制的预测电流控制方法,来减小对参数解耦所造成的影响,保证异步电机矢量控制电流的跟随性能。
研究结果表明,该策略能够有效地优化了矢量控制的动态响应,电流和转矩波动大大减少,并具有较强的鲁棒性。
关键词:异步电机;矢量控制;预测电流控制;动态响应;鲁棒性Abstract:Traditional vector control of voltage source inverter asynchronous motor,the stator current control effect directly affects the vector control performance,is very sensitive to the parameter tynsformation of the motor o In this paper,a predictive current control method of asynchronous motor vector control is proposed,to reduce the influence of parameter decoupling and ensure the current following performance of asynchronous motor vector control o Research results show that this strategy can effectively optimize the dynamic response of vector control, greatly reduce the current and torque fluctuations,and has strong robustness.Key words:Asynchronous motor;Vector control;Predictive current;Dynamic response;Robustness【中图分类号】TM343【文献标识码】B【文章编号】1561-0330(2019)11-0084-031引言异步电机矢量控制是一种模拟直流电动机的控制方式,将定子电流分解为可独立控制的励磁分量和转矩分量,具有较高的动态性能;通过数字处理器可进行实时控制;和目前控制性能较差的控制方法相比,成本几乎不用增加就可实现高性能的控制方法,在工业应用场合得到了非常广泛的应用电流控制电压源逆变器的矢量控制,通过电流控制可使逆变器输出电流快速跟踪给定电流,因此此控制中不需要电流控制器,且比其它调制方法更为简单,对于给定的带宽和逆变器的给定直流电压,逆变器功率器件的开关频率会随着电动机参数的变化而变化,这是釆用容差带电流控制逆变器的主要特点。
一种储能变流器控制方法及储能变流器
一种储能变流器控制方法及储能变流器摘要储能变流器是储能系统中非常重要的部分,它的控制对储能系统的性能有着重要影响。
本文介绍了一种基于电压矢量控制的储能变流器控制方法。
该方法可在不需要外部控制信号的情况下,实现电网输电侧和储能侧之间的交互。
本文还介绍了一种储能变流器的设计,该储能变流器可满足多种应用需求,包括电池储能系统和超级电容储能系统等。
最后,本文通过实验验证了该控制方法的有效性和储能变流器的性能。
关键词:储能变流器、电压矢量控制、电池储能、超级电容储能AbstractThe energy storage inverter is a very important part of the energy storage system, and its control has an important impact on the performance of the energy storage system. This paper introduces a voltage vector control based energy storage inverter control method. The method can achieve interaction between the grid-side and the storage-side without requiring external control signals. This article also introduces a design of an energy storage inverter that can meet various application requirements, including battery energy storage systems and supercapacitor energy storage systems. Finally, this paper verifies the effectiveness of the control method and the performance of the energy storage inverter through experiments.Keywords: energy storage inverter, voltage vector control, battery energy storage, supercapacitor energy storage引言随着全球能源消耗的不断增长,能源的储存和利用成为了人们关注的热点问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D
基于矢量控制的异步电机改进模型预测控制
备重点实验室项目 ( szjj2015 - 066 )
驱动控制 rive and control [ 12] Rr , L r 分别为定子和转子电阻、 提出了一种准无差拍模型预测电流控制策略, 电感; L m 为互感; T r = L r / R r 为转子电磁时间常数; σ = 1 - L m L m / L s L r 电 13] 该方法只是减少了滚动次数; 文献[ 通过将模型 机漏磁系数。 预测电流控制转换为模型预测电压控制, 实现了无 但该方法扇区判断和分区判断复杂 , 不 需循环寻优, 2 传统 MPC 机理分析 利于控制器的设计。 [12 ] 本文以异步电机矢量控制系统为研究对象, 在 异步电机的模型预测控制 框图如图 1 所示。 分析了传统 MPC 机理的基础上提出了改进 MPC 。 首先, 建立了异步电机的离散数学模型 , 同时简单分 析了异步电机传统 MPC 算法机理; 然后, 重点阐述 主要包括: 参考电 了改进 MPC 算法具体设计过程, 压的预测; 价值函数最优控制问题的转换; 改进最优 电压的选取。该改进算法可将传统 MPC 中 8 次电 流滚动预测和价值函数最优控制 ( 8 次价值函数计 算和 7 次逻辑比较 ) 简化为 1 次参考电压预测及最 4 次逻辑判断 ) 。 因此, 改 优电压的选择( 1 次计算、 进算法大大减少了计算量和价值函数最优控制的复 图 1 异步电机传统 MPC 框图 杂程度, 同时保证了良好的动静态性能。 本文主要采用具有延时补偿作用的 MPC 算法 的电机矢量控制系统, 其原理如下, 在 k 采样时刻, 1 异步电机的离散数学模型 由相关采样值和式( 1 ) ~ 式( 4 ) 得到两静止 αβ 坐标 当采样周期较小时, 采用向前欧拉法, 根据异步 下磁链矢量 ψrαβ ( k + 1 ) 和定子电流矢量 i sαβ ( k + [12 ] 电机在两相静止 αβ 坐标系下动态数学摸型 可得 1) , 同时由于在 k 采样时刻进行滚动预测和价值函 其离散数学模型如下: 数的最优控制, 得到的最优电压矢量为当前采样周 2 2 Rs Lr + Rr Lm 期的电压矢量, 但由于数字控制系统存在一拍延迟 , i sα ( k + 1 ) = ( 1 - ) T s i sα ( k ) + 2 [2 , 9 ] σL s L r 。 为了消除延迟控 导致最优电压矢量延时作用 需要在第 k 采样时刻再由 ψrαβ ( k + 1 ) 和 i sαβ ( k + 制, Lm Lm Ts T ω ( k ) ψ rβ ( k ) + ψ ( k) + 1 ) 以及 8 种基础电压矢量 u i ( k + 1 ) 滚动预测 i sαβ ( k σ L s L r T r rα σL s L r s r + 2) , 即将式( 1 ) 和式( 21) + 2 时刻的预测值: σ L s sα 刘 2 2 2 2 Rs Lr + Rr Lm Rs Lr + Rr Lm i ( k + 2 ) = ( 1 - ) T i ( k + 1 ) + i sβ ( k + 1 ) = ( 1 - ) T s i sβ ( k ) - i sα s sα 2 2 威 σL s L r σL s L r 等 Lm Lm Ts Lm Ts Lm Ts T ω ( k + 1) · ψ rα ( k + 1 ) + ω r ( k ) ψ rα ( k ) + ψ rβ ( k ) + L L T Ls Lr s r 基 σ σ σL s L r σL s L r T r s r r 于 矢 Ts Ts u i sα ( k + 1 ) ( 5 ) 量 ψ rβ ( k + 1 ) + u sβ ( k ) ( 2) L 控 σ L σ s s 制 2 2 Rs Lr + Rr Lm Lm Ts 1 的 i i sβ ( k + 2 ) = ( 1 - ) T s i sβ ( k + 1 ) - i ( k ) + ( 1 - ) T s ψ rα ( k ) - ψ rα ( k + 1 ) = 2 异 T r sα Tr σL s L r 步 电 T s ω r ( k ) ψ rβ ( k ) ( 3) Lm Ts 机 ω ( k + 1 ) ψ rα ( k + 1 ) + 改 σL s L r r Lm Ts i sβ ( k ) + T s ω r ( k ) ψ r α ( k ) + ψ rβ ( k + 1 ) = 进 Tr Lm Ts Ts 模 u isβ ( k + 1 ) 型 ψ rβ ( k + 1 ) + 1 预 σL s L r T r σL s ( 1 - ) T s ψ rβ ( k ) ( 4) 测 Tr ( 6) 控 i sα ( k ) 式中: T s 为采样周期; i sα ( k + 1 ) 和 i sβ ( k + 1 ) , 式 中 : ω r ( k + 1 ) 为 k + 1 时刻转子电角频率预测值 ; 制 和 i sβ ( k ) , ψ rα ( k + 1 ) 和 ψ rβ ( k + 1 ) , ψ rα ( k ) 和 ψ rβ ( k ) u i sα ( k + 1 ) , u i sβ ( k + 1 ) , i i sα ( k + 2 ) , i isβ ( k + 2 ) 分别为 分别为 k + 1 和 k 时刻定子电流与转子磁链的 α, β 8 个基础电压矢量及其对应作用下预测电流 α, β轴 轴分量; u sα ( k ) 和 u sβ ( k ) 为异步电机定子输入电压 值, 下标 i = 0 ~ 7 。 67 Ls 和 α, β 轴分量; ω r ( k ) 为转子 k 时刻角速度; R s , 最后进行价值函数最优控制 ( 8 次价值函数的