A星算法实验报告
A星算法求解八数码技术报告
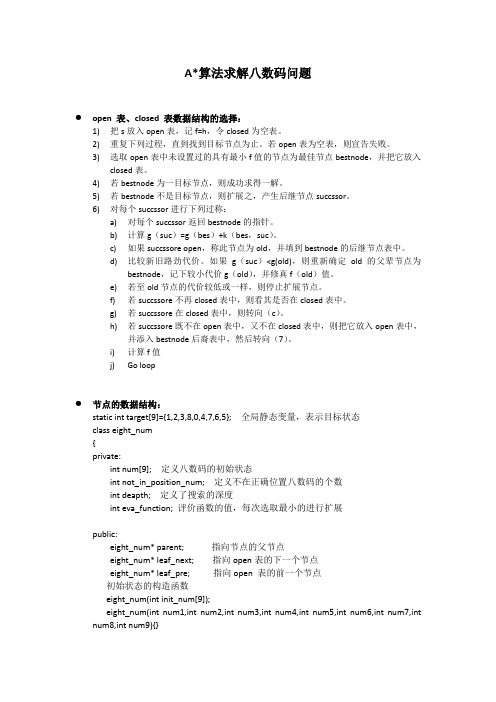
A*算法求解八数码问题●open 表、closed 表数据结构的选择:1)把s放入open表,记f=h,令closed为空表。
2)重复下列过程,直到找到目标节点为止。
若open表为空表,则宣告失败。
3)选取open表中未设置过的具有最小f值的节点为最佳节点bestnode,并把它放入closed表。
4)若bestnode为一目标节点,则成功求得一解。
5)若bestnode不是目标节点,则扩展之,产生后继节点succssor。
6)对每个succssor进行下列过称:a)对每个succssor返回bestnode的指针。
b)计算g(suc)=g(bes)+k(bes,suc)。
c)如果succssore open,称此节点为old,并填到bestnode的后继节点表中。
d)比较新旧路劲代价。
如果g(suc)<g(old),则重新确定old的父辈节点为bestnode,记下较小代价g(old),并修真f(old)值。
e)若至old节点的代价较低或一样,则停止扩展节点。
f)若succssore不再closed表中,则看其是否在closed表中。
g)若succssore在closed表中,则转向(c)。
h)若succssore既不在open表中,又不在closed表中,则把它放入open表中,并添入bestnode后裔表中,然后转向(7)。
i)计算f值j)Go loop●节点的数据结构:static int target[9]={1,2,3,8,0,4,7,6,5}; 全局静态变量,表示目标状态class eight_num{private:int num[9]; 定义八数码的初始状态int not_in_position_num; 定义不在正确位置八数码的个数int deapth; 定义了搜索的深度int eva_function; 评价函数的值,每次选取最小的进行扩展public:eight_num* parent; 指向节点的父节点eight_num* leaf_next; 指向open表的下一个节点eight_num* leaf_pre; 指向open 表的前一个节点初始状态的构造函数eight_num(int init_num[9]);eight_num(int num1,int num2,int num3,int num4,int num5,int num6,int num7,int num8,int num9){}eight_num(void){ }计算启发函数g(n)的值void eight_num::cul_para(void){}显示当前节点的状态void eight_num::show(){}复制当前节点状态到一个另数组中void eight_num::get_numbers_to(int other_num[9]){}设置当前节点状态(欲设置的状态记录的other数组中)void eight_num::set_num(int other_num[9]){}eight_num& eight_num::operator=(eight_num& another_8num){} eight_num& eight_num::operator=(int other_num[9]){}int eight_num::operator==(eight_num& another_8num){}int eight_num::operator==(int other_num[9]){}空格向上移int move_up(int num[9]){}空格向下移int move_down(int num[9]){}空格向左移int move_left(int num[9]){}空格向右移int move_right(int num[9]){}判断可否解出int icansolve(int num[9],int target[9]){}判断有无重复int existed(int num[9],eight_num *where){}寻找估价函数最小的叶子节点eight_num* find_OK_leaf(eight_num* start){}}A*算法求解框图:●分析估价函数对搜索算法的影响:估价函数就是评价函数,它用来评价子结点的好坏,因为准确评价是不可能的,所以称为估值。
A星算法求八数码问题实验报告
A星算法求八数码问题实验报告人工智能实验报告实验名称:八数码问题姓名:xx学号:2012210xxxx计算机学院2014年1月14日一.实验目的掌握A*的思想,启发式搜索,来求解在代价最小的情况下将九宫格从一个状态转为另状态的路径。
二.实验内容给定九宫格的初始状态,要求在有限步的操作内,使其转化为目标状态,且所得到的解是代价最小解(2 8 31 6 47 0 52 8 31 6 47 0 5三、A*算法思想:1、思想:A*算法是一种静态路网中求解最短路最有效的直接搜索方法。
估价值与实际值越接近,估价函数取得就越好2、原理:估价函数公式表示为: f(n)=g(n)+h(n),其中 f(n) 是从初始点经由节点n到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n) 是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
并且如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行此时的搜索效率是最高的。
如果估价值>实际值,搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
四、算法流程:Heuristic_Search(启发式搜索)While是从未拓展表中删N为目是,输出路径否,生成n的所有子状态Case:此子状Case:此子状Case:此子状计算该子状记录比已有记录比已有返回五、关键技术:1、使用了CreateChild()函数,求得了任意未拓展九宫格的扩展结点,便于拓展子空间,搜索所有情况。
关键代码:bool CreateChild(NOExtend ns[],NOExtend ne){int i,j,k=0;for(i=0;i<3;i++){for(j=0;j<3;j++){if(ne.cur_sudoku.num[i][j]==0){ //寻找九宫格空缺所在的坐标if(i-1>=0){ //将空格向上移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);//先把未改变的九宫格复制给九宫格数组的某一元素ns[k].cur_sudoku.num[i][j]=ne.cur_sudoku.num[i-1][j];//然后仅改变此二维九宫格的两项值即可ns[k].cur_sudoku.num[i-1][j]=0;ns[k].dx=1;k++;}if(j+1<=2){ //将空格向右移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);ns[k].cur_sudoku.num[i][j]=ns[k].cur_su doku.num[i][j+1];ns[k].cur_sudoku.num[i][j+1]=0;ns[k].dx=1;k++;}if(i+1<=2){ //将空格向下移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);ns[k].cur_sudoku.num[i][j]=ns[k].cur_su doku.num[i+1][j];ns[k].cur_sudoku.num[i+1][j]=0;ns[k].dx=1;k++;}if(j-1>=0){ //将空格向左移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);ns[k].cur_sudoku.num[i][j]=ns[k].cur_su doku.num[i][j-1];ns[k].cur_sudoku.num[i][j-1]=0;ns[k].dx=1;k++;}return 1;}}}return 0;2、用启发式搜索函数寻找求解路径,运用了A*算法的思想,能够更快的求解出最优解。
数码问题C语言A星算法详细实验报告含代码
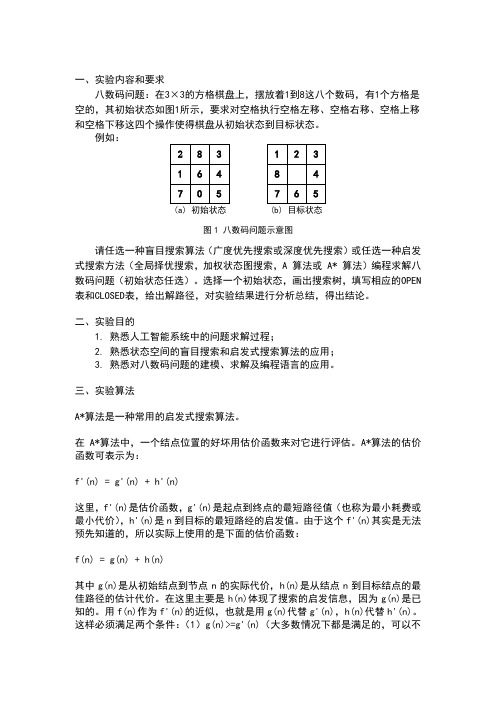
一、实验内容和要求八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。
例如:图1 八数码问题示意图请任选一种盲目搜索算法(广度优先搜索或深度优先搜索)或任选一种启发式搜索方法(全局择优搜索,加权状态图搜索,A 算法或 A* 算法)编程求解八数码问题(初始状态任选)。
选择一个初始状态,画出搜索树,填写相应的OPEN 表和CLOSED表,给出解路径,对实验结果进行分析总结,得出结论。
二、实验目的1. 熟悉人工智能系统中的问题求解过程;2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;3. 熟悉对八数码问题的建模、求解及编程语言的应用。
三、实验算法A*算法是一种常用的启发式搜索算法。
在A*算法中,一个结点位置的好坏用估价函数来对它进行评估。
A*算法的估价函数可表示为:f'(n) = g'(n) + h'(n)这里,f'(n)是估价函数,g'(n)是起点到终点的最短路径值(也称为最小耗费或最小代价),h'(n)是n到目标的最短路经的启发值。
由于这个f'(n)其实是无法预先知道的,所以实际上使用的是下面的估价函数:f(n) = g(n) + h(n)其中g(n)是从初始结点到节点n的实际代价,h(n)是从结点n到目标结点的最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
用f(n)作为f'(n)的近似,也就是用g(n)代替g'(n),h(n)代替h'(n)。
这样必须满足两个条件:(1)g(n)>=g'(n)(大多数情况下都是满足的,可以不用考虑),且f必须保持单调递增。
(2)h必须小于等于实际的从当前节点到达目标节点的最小耗费h(n)<=h'(n)。
3A星算法实验报告
3A星算法实验报告
一、实验背景
星算法(A*)是一种基于启发式算法,它将图形中的启发式算法应用到
图形空间中的路径规划上,此算法具有较高的效率,可以把空间中没有考
虑的因素考虑在内,使过程更加的准确。
星算法的核心思想是:每次出最
佳的节点,也就是不停的计算出节点的最佳路径,然后从这个路径中选择
出一条最佳路径,再不断的迭代下去,直至找到目标。
二、实验步骤
(1)建立空间:定义空间的范围,比如设定节点的大小、路径的长度、地图大小等参数;
(2)初始化地图:设定起点和终点,初始化路径地图;
(3)计算启发函数:根据节点的位置,计算出每个节点的启发函数值;
(4)启发式:根据计算出来的启发函数值,按照启发式算法的方式,从起点开始不断的迭代;
(5)记录结果:记录出来的最佳路径,计算出最优路径的长度;
(6)对比结果:使用其他算法,如Dijkstra算法,对比结果,比较
各种算法的效率;
三、实验结果
实验结果表明,在进行路径时。
启发式搜索A星算法的八数码实现报告

1. 请简述人工智能概念于何时何地由何人第一次正式提出?答:1956年夏,在美国的达特茅斯(Dartmouth )学院,由McCarthy (斯坦福大学,MIT )、Minsky (哈佛大学数学和神经学家)、Lochester (IBM 公司)、Shannon (贝尔实验室)四人共同发起,邀请IBM 公司的Moore 、Samuel ,MIT 的Selfridge 、Solomonff ,还有Simon 、Newell 等人参加学术讨论班,在一起共同学习和探讨用机器模拟智能的各种问题,在会上,经McCarthy 提议,决定使用“人工智能”一词来概括这个研究方向。
这次具有历史意义的会议标志着人工智能这个学科的正式诞生。
2.当前人工智能有哪些学派?简述它们在人工智能理论上有何不同之处?a.符号主义: 起源于数理逻辑 基于逻辑推理 认知是符号的处理过程,推理是问题求解过程(核心是知识表示) 无法表示不确知事物和常识问题 Nilssonb.连接主义: 起源于仿生学 基于神经网络 思维是神经元的连接活动而不是符号运算过程(学习算法和网络结构) 用大量非线性并行处理器模拟大脑 Newellc.行为主义: 起源于控制论 基于”感知-行动” 直接利用机器对环境发出作用后环境对作用者的响应为原型(有限状态机,不表示不推理) 能应付复杂环境 MIT Brooks 3.八数码问题初始状态定义估价函数: f(x) = d(x) + h(x),其中:d(x)表示节点x 的深度,h(x)表示节点x 的棋局与目标节点棋局距离的度数。
(1) 使用以上估价函数进行全局择优搜索,列出头三步搜索中的OPEN 表和CLOSED 表全局择优搜索过程如下:(1) 把初始节点S0放入OPEN 表,f(S0)。
(2) 如果OPEN 表为空,则问题无解,退出。
(3) 把OPEN 表的第一个节点(记为节点n)取出放入CLOSED 表。
(4) 考察节点n 是否为目标节点。
基于启发式搜索算法A星解决八数码问题
int statue[size][size]; //记录当前节点的状态 struct Node * Tparent; //用来构成搜索树,该树由搜索图的反向指针构成 struct Node * opennext; //用来构成 open 表,该指针指向该节点在 open 表中的下一个 节点 struct Node * closenext; //用来构成 open 表,该指针指向该节点在 close 表中的下一个 节点 struct Node * brothernext; //构成兄弟链表,该指针指向该节点在兄弟链表中的下一个节 点 int f; //记录当前节点的 f 函数值 int g; //记录当前节点的 g 函数的值 int h; //记录当前节点的 h 函数的值 };
5
get_bestroute (bestNode); return; }
2.2.7 生成 bestNode 所指节点的后继节点
定义一个后继节点链表,表头为 head_b,将 bestNode 所指节点的不是前驱节点的后继 节点,链接到后继及诶单链表中。getchild 函数可以实现这个功能。
//产生 bestNode 的一切后继节点。。 head head_b; //定义 bestNode 的后继节点表 head_b.next=NULL; getchild (&head_b,bestNode); //产生 bestNode 的子节点,将不是 bestNode 的父节点的
while (head_b.next!=NULL) { Node *tmp=getbrother (&head_b); //从后继节点表中取出一个节点记为 tmp,并从
人工智能(A星算法)
A*算法实验报告实验目的1.熟悉和掌握启发式搜索的定义、估价函数和算法过程2. 学会利用A*算法求解N数码难题3. 理解求解流程和搜索顺序实验原理A*算法是一种有序搜索算法,其特点在于对估价函数的定义上。
对于一般的有序搜索,总是选择f值最小的节点作为扩展节点。
因此,f是根据需要找到一条最小代价路径的观点来估算节点的,所以,可考虑每个节点n的估价函数值为两个分量:从起始节点到节点n的代价以及从节点n到达目标节点的代价。
实验条件1.Window NT/xp/7及以上的操作系统2.内存在512M以上3.CPU在奔腾II以上实验内容1.分别以8数码和15数码为例实际求解A*算法2.画出A*算法求解框图3.分析估价函数对搜索算法的影响4.分析A*算法的特点实验分析1. A*算法基本步骤1)生成一个只包含开始节点n0的搜索图G,把n放在一个叫OPEN的列表上。
2)生成一个列表CLOSED,它的初始值为空。
3)如果OPEN表为空,则失败退出。
4)选择OPEN上的第一个节点,把它从OPEN中移入CLPSED,称该节点为n。
5)如果n是目标节点,顺着G中,从n到n的指针找到一条路径,获得解决方案,成功退出(该指针定义了一个搜索树,在第7步建立)。
6)扩展节点n ,生成其后继结点集M ,在G 中,n 的祖先不能在M 中。
在G 中安置M 的成员,使他们成为n 的后继。
7)从M 的每一个不在G 中的成员建立一个指向n 的指针(例如,既不在OPEN 中,也不在CLOSED 中)。
把M 1的这些成员加到OPEN 中。
对M 的每一个已在OPEN 中或CLOSED 中的成员m ,如果到目前为止找到的到达m 的最好路径通过n ,就把它的指针指向n 。
对已在CLOSED 中的M 的每一个成员,重定向它在G 中的每一个后继,以使它们顺着到目前为止发现的最好路径指向它们的祖先。
8)按递增f *值,重排OPEN (相同最小f *值可根据搜索树中的最深节点来解决)。
实验四:A星算法求解迷宫问题实验

实验四:A*算法求解迷宫问题实验一、实验目的熟悉和掌握启发式搜索的定义、估价函数和算法过程,并利用A*算法求解迷宫问题,理解求解流程和搜索顺序。
二、实验内容迷宫问题可以表述为:一个二维的网格,0表示点可走,1表示点不可以走,点用(x,y)表示,寻找从某一个给定的起始单元格出发,经由行相邻或列相邻的单元格(可以通过的),最终可以到达目标单元格的、所走过的单元格序列。
在任一个单元格中,都只能看到与它邻近的4个单元格(如果位于底边,则只有3个;位于4个角上,则只有2个是否能通过)。
A*算法是人工智能中的一种搜索算法,是一种启发式搜索算法,它不需遍历所有节点,只是利用包含问题启发式信息的评价函数对节点进行排序,使搜索方向朝着最有可能找到目标并产生最优解的方向。
它的独特之处是检查最短路径中每个可能的节点时引入了全局信息,对当前节点距终点的距离做出估计,并作为评价节点处于最短路线上的可能性的度量。
A*算法中引入了评估函数,评估函数为:f(n)=g(n)+h(n)其中:n是搜索中遇到的任意状态。
g(n)是从起始状态到n的代价。
h(n)是对n到目标状态代价的启发式估计。
即评估函数f ( n) 是从初始节点到达节点n 处已经付出的代价与节点n 到达目标节点的接近程度估价值的总和。
?这里我们定义n点到目标点的最小实际距离为h(n)*,A*算法要满足的条件为:h(n)<=h(n)*迷宫走的时候只能往上下左右走,每走一步,代价为1,这里我们采用的估价函数为当前节点到目标节点的曼哈顿距离,即:h(n)=| –|+ | –|这里end表示迷宫的目标点,n表示当前点,很明显这里h(n)<=h(n)*。
g(n)容易表示,即每走一步的代价是1,所以利用f(n)=g(n)+h(n)这种策略,我们可以不断地逼近目标点,从而找到问题的解。
时间复杂度:m行n列的迷宫矩阵实现算法的时间复杂度为O(m*n).实验结果:)$实验源码:#include <queue>#include <vector>$#include <iostream>using namespace std;int direc[4][2]={{0,1},{-1,0},{0,-1},{1,0}};enum Flag{SEAL,OPEN,UNVISITED&};typedef struct node{int _x,_y; oint!=NULL){delete _seal[i][j].point;}}?}for(i=0;i<=_len;++i){delete []_seal[i];delete []_maze[i];}delete []_seal;delete []_maze;}?void input(){cout<<"输入: 迷宫左边长,上边宽! 例如:30 20"<<endl;cin>>_len>>_wid;_seal=new Seal*[_len+1];_maze=new unsigned char*[_len+1];for(int i=0;i<=_len;++i){_seal[i]=new Seal[_wid+1];_maze[i]=new unsigned char[_wid+1];|}cout<<"从下一行开始输入迷宫信息:"<<endl;for( i=1;i<=_len;++i){for(int j=1;j<=_wid;++j){cin>>_maze[i][j];_seal[i][j].flag=UNVISITED;_seal[i][j].point=NULL;},}cout<<"输入起点坐标,目标点坐标,例如:1 1 30 20"<<endl;cin>>_sx>>_sy>>_ex>>_ey;if(_maze[_sx][_sy]=='1'||_maze[_ex][_ey]=='1'||bound(_sx,_sy)==fal se||bound(_ex,_ey)==false){cout<<"不可能存在这样的情况!"<<endl;return;}cout<<"调用A*算法打印结果如下:"<<endl;A();》}lag=OPEN;_seal[_sx][_sy].point=p_node;while(!()){p_node=();();int x=p_node->_x;int y=p_node->_y;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A*算法实验报告
一、实验原理
A*算法,作为启发式算法中很重要的一种,被广泛应用在最优路径求解和一些策略设计的问题中。
而A*算法最为核心的部分,就在于它的一个估值函数的设计上:
f(n)=g(n)+h(n)
其中f(n)是每个可能试探点的估值,它有两部分组成:一部分为g(n),它表示从起始搜索点到当前点的代价(通常用某结点在搜索树中的深度来表示)。
另一部分,即h(n),它表示启发式搜索中最为重要的一部分,即当前结点到目标结点的估值,h(n)设计的好坏,直接影响着具有此种启发式函数的启发式算法的是否能称为A*算法。
一种具有f(n)=g(n)+h(n)策略的启发式算法能成为A*算法的充分条件是:
1) 搜索树上存在着从起始点到终了点的最优路径。
2) 问题域是有限的。
3)所有结点的子结点的搜索代价值>0。
4)h(n)=<h*(n) (h*(n)为实际问题的代价值)。
当此四个条件都满足时,一个具有f(n)=g(n)+h(n)策略的启发式算法能成为A*算法,并一定能找到最优解。
对于一个搜索问题,显然,条件1,2,3都是很容易满足的,而
条件4):h(n)<=h*(n)是需要精心设计的,由于h*(n)显然是无法知道的。
所以,一个满足条件4)的启发策略h(n)就来的难能可贵了。
不过h(n)距离h*(n)的程度不能过大,否则h(n)就没有过强的区分能力,算法效率并不会很高。
对一个好的h(n)的评价是:h(n)在h*(n)的下界之下,并且尽量接近h*(n).
二、实验过程
运行未修改的程序会得到最优路径为:
算法共扩展节点数792.
若修改源程序,即允许走斜线则
distance=(int)sqrt((end_x-x)*(end_x-x)+(end_y-y)*(end_y-y)),即将估价函数改为欧式距离
四连通改为八连通
trytile(x,y-1,n,1); //尝试向上移动
trytile(x+1,y-1,n,2);// 尝试向前上方移动
trytile(x-1,y-1,n,2); // 尝试向后上方移动
trytile(x-1,y+1,n,2); // 尝试向后下方移动
trytile(x+1,y+1,n,2); // 尝试向前下方移动
trytile(x,y+1,n,1); //尝试向下移动
trytile(x-1,y,n,1); //尝试向左移动
trytile(x+1,y,n,1); //尝试向右移动
并修改g值if(lei==1) //如果是直线走
{g_value=father->g+1;
}
if(lei==2) //如果是斜线走
{g_value=father->g+1.414;
}
修改后的扩展结点数837
三、实验分析
A*算法最为核心的过程,就在每次选择下一个当前搜索点时,是从所有已探知的但未搜索过点中(可能是不同层,亦可不在同一条支路上),选取f 值最小的结点进行展开。
而所有“已探知的但未搜索过点”可以通过一个按f值升序的队列(即优先队列)进行排列。
这样,在整体的搜索过程中,只要按照类似广度优先的算法框架,从优先队列中弹出队首元素(f值),对其可
能子结点计算g、h和f值,直到优先队列为空(无解)或找到终止点为止。
若修改地图该算法得到的路径是:
算法依然有效
其实该算法的启发函数是两点之间的欧式距离,即当前点到目标点的直线距离,对于此题目来说欧式距离启发信息相对太少,若将启发函数改为:
chang=end_x-x;
kuan=end_y-y;
if(chang>=kuan)
{distance=(int)1.414*kuan+chang-kuan;
}
else
{distance=(int)1.414*chang+kuan-chang;
}即每次保证走的是四十五度,但与上图比较路径多了,代价多了,说明h函数并不合理,不满足可采纳性条件,即h<=h*.
四、修改程序部分
若修改源程序,即允许走斜线则
distance=(int)sqrt((end_x-x)*(end_x-x)+(end_y-y)*(end_y-y)),即将估价函数改为欧式距离
四连通改为八连通
trytile(x,y-1,n,1); //尝试向上移动
trytile(x+1,y-1,n,2);// 尝试向前上方移动
trytile(x-1,y-1,n,2); // 尝试向后上方移动
trytile(x-1,y+1,n,2); // 尝试向后下方移动
trytile(x+1,y+1,n,2); // 尝试向前下方移动
trytile(x,y+1,n,1); //尝试向下移动
trytile(x-1,y,n,1); //尝试向左移动
trytile(x+1,y,n,1); //尝试向右移动
并修改g值if(lei==1) //如果是直线走
{g_value=father->g+1;
}
if(lei==2) //如果是斜线走
{g_value=father->g+1.414;
}。