连续系统模型的离散化处理方法优秀课件
合集下载
【大学课件】3-4 线性连续系统状态空间模型的离散化

近似离散化方法(5/6)—例3-12 例 近似离散化方法
对上述近似离散化法的精度可检验如下: 1. 当T=1s时,精确法的计算结果为 1 0.432332 0.283834 G= H = 0 0.135335 0.432332 近似法的计算结果为
1 1 G= 0 −1
3-9, 解 由例3-9,该系统的转移矩阵函数为
t − t0 1 Φ(t, t0 ) = (t +1)(t0 +1) 0 1
线性时变连续系统的离散化(5/6) 线性时变连续系统的离散化
因此,由上述离散化计算公式,可分别计算
x((k +1)T) =Φ(T)x(kT) + ∫
(k +1)T
kT
Φ k +1)T −τ ]dτ Bu(kT) [(
对上式作变量代换,令t=(k+1)T-τ,则上式可记为
x((k +1)T) =Φ(T)x(kT) + ∫ Φ(t)dtBu(kT)
0
T
将上式与线性定常离散系统的状态方程 x((k+1)T)=(I+AT)x(kT)+BTu(kT) 比较,可知两式对任意的x(kT)和u(kT)成立的条件为 G(T)=Φ(T)=eAT
可得线性时变连续系统离散化模型各矩阵如下
G(k) = Φ[(k +1)T, kT] H(k) = ∫
(k +1)T kT
Φ[(k +1)T, τ]B(τ)dτ
线性时变连续系统的离散化(4/6) 线性时变连续系统的离散化
例3-13 试写出下列线性时变连续系统的离散化系统的状态 方程。
1 0 1 ɺ x = (t +1)2 x + u 1 0 0
连续系统的离散化方法课件
离散化方法的意义
精确性
离散化方法可以提供对连续系统的精 确近似,特别是在计算机仿真和数字 控制系统中。
可计算性
离散化方法可以将不可计算的分析转 化为可计算的形式,便于进行数值计 算和控制器设计。
离散化方法的应用场景
01
02
03
数字控制
在数字控制系统中,连续 系统的离散化是必要的步 骤,以便在数字计算机上 进行数值计算和控制。
小波基选择
常用的小波基包括Haar小波、Daubechies小波、Morlet 小波等。
误差分析
小波变换法的误差主要来自于变换误差和离散化误差。
05
离散化方法的评估与优化
评估离散化方法优劣的标准
01
02
03
04
精度
离散化方法是否能准确代表原 连续系统。
稳定性
离散化方法在一定参数变化范 围内是否能保持稳定。
状态空间模型
用状态变量和输入、输出变量描述连续系统的动态特性。
状态空间模型通常形式为:`x'(t) = Ax(t) + Bu(t)` 和 `y(t) = Cx(t) + Du(t)`,其中 `x(t)` 表 示系统状态,`u(t)` 表示系统输入,`y(t)` 表示系统输出,`A`, `B`, `C`, `D` 是系数矩阵。
化率。
通过求解 ODE,可以得到系统 在任意时刻的状态。
传递函数
表示连续系统在输入和输出之间的传递 特性。
传递函数通常形式为:`G(s) = Y(s) / U(s)`,其中 `Y(s)` 和 `U(s)` 分别是输 出和输入的拉普拉斯变换,`s` 是复变
量。
通过分析传递函数的零点、极点和增益 ,可以得到系统的稳定性和性能特性。
连续系统建模
第 25 页
2、 z函数
? 在零状态(y,u为0)下对差分方程两边取z变换:
n
? H (z) ? Y(z) ? ? U (z)
bj z? j
j?1
n
ai z?i
i? 0
?特性与Laplace变换下的传递函数类似。
第 26 页
3、权序列
? 定义单位脉冲序列为
?(n)
?
?1, n ? ??0, n ?
举例
IR(t)
?
x? y R
?
c
dy dt
u 用间隔为T的脉冲序列采样可得:
IR (n) ?
x(n) ? y(n) R
?
c
y(n) ? y(n ? 1) T
第 28 页
举例
y(n)
?
?x(n)
?
1? ? ?
y(n
?
1), 其中:?
?
1?
1 RC
/
T
x(n) ? ? ?
y(n)
?
x(n)
Z -1
1??
第 16 页
仿真结果
?
step([5400],[2 2.5
5400]
? 运行结果如下:
?
t=[0:0.01:3]
?
[y,x,t]=step([5400],[2 2.5
5400],t);
? plot(t,y);
? 运行结果如下:
第 17 页
1.2 离散时间模型
? 系统的输入、输出以及内部变量是时间的离散函数(时间 序列)称系统为离散时间模型。
u 系统的性能不仅与各个元部件(基本环节)传递函数有关, 还与系统的结构形式有关。
连续系统离散化方法
Z 变换法的特点是: ① D ( z ) 和 D ( s ) 有相同的单位脉冲响应序列; ②若 D ( s ) 稳定,则 D ( z ) 也稳定; ③ D ( z ) 存在着频率失真; ④该法特别适用于频率特性为锐截止型的连续滤波器的离散化。 它主要应用于连续控制器 D ( s ) 具有部分分式结构或能较容易地分解为并联结构,以及
5.2.1
连续系统离散化方法
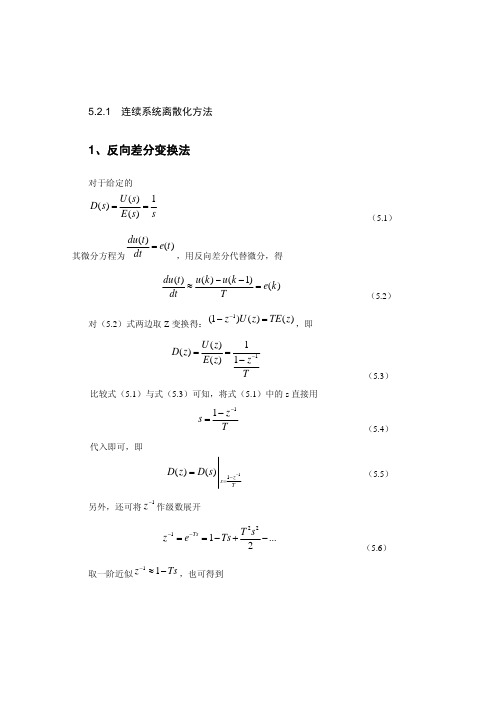
1、反向差分变换法
对于给定的
D( s) =
U ( s) 1 = E (s) s
(5.1)
du (t ) = e(t ) ,用反向差分代替微分,得 其微分方程为 dt du (t ) u (k ) − u (k − 1) ≈ = e( k ) dt T
对(5.2)式两边取 Z 变换得: (1 − z )U ( z ) = TE ( z ) ,即
上式可以写成
1⎞ ⎛ ⎛1⎞ 2 ⎜σ − ⎟ + ω < ⎜ ⎟ 2⎠ ⎝ ⎝ 2⎠
2
2
由上式可以看出, s 平面的稳定域映射到 z 平面上以 σ = 1 / 2 , ω = 0 为圆心, 1 / 2 为半 径的圆内,如图 5-3 所示。
jω
Im
ω =0
σ
Re
z =1
图 5-3 反向差分变换 s 平面与 z 平面的对应关系 反向差分变换方法的主要特点如下: ①变换计算简单; ②由图 5-3 看出, s 平面的左半平面映射到 z 平面的单位圆内部一个小圆内,因而,如果
⎛ z −1⎞ Re ⎜ ⎟<0 ⎝ T ⎠
令 z = σ + jω ,则上式可以写成
⎛ σ + jω − 1 ⎞ Re⎜ ⎟<0 T ⎝ ⎠
因为 T > 0 ,则有 σ − 1 < 0 即 σ < 1 ,如图 5-4 所示。
5.2.1
连续系统离散化方法
1、反向差分变换法
对于给定的
D( s) =
U ( s) 1 = E (s) s
(5.1)
du (t ) = e(t ) ,用反向差分代替微分,得 其微分方程为 dt du (t ) u (k ) − u (k − 1) ≈ = e( k ) dt T
对(5.2)式两边取 Z 变换得: (1 − z )U ( z ) = TE ( z ) ,即
上式可以写成
1⎞ ⎛ ⎛1⎞ 2 ⎜σ − ⎟ + ω < ⎜ ⎟ 2⎠ ⎝ ⎝ 2⎠
2
2
由上式可以看出, s 平面的稳定域映射到 z 平面上以 σ = 1 / 2 , ω = 0 为圆心, 1 / 2 为半 径的圆内,如图 5-3 所示。
jω
Im
ω =0
σ
Re
z =1
图 5-3 反向差分变换 s 平面与 z 平面的对应关系 反向差分变换方法的主要特点如下: ①变换计算简单; ②由图 5-3 看出, s 平面的左半平面映射到 z 平面的单位圆内部一个小圆内,因而,如果
⎛ z −1⎞ Re ⎜ ⎟<0 ⎝ T ⎠
令 z = σ + jω ,则上式可以写成
⎛ σ + jω − 1 ⎞ Re⎜ ⎟<0 T ⎝ ⎠
因为 T > 0 ,则有 σ − 1 < 0 即 σ < 1 ,如图 5-4 所示。
第5章数字控制系统的连续——离散化设计-PPT精品文档

说明: 连续——离散化设计是一种近似的设计方法:
由D(s)到D(z)的转换是一种近似过程; 在设计中,没有考虑保持器对系统的影响。(零保带来T/2
的相位滞后,使系统闭环性能变坏。因此连续——离散化设 计的系统,要求有较小的采样周期T。) 本章重点: 1. 由D(s)到D(z)的多种近似方法。 2. 检验所设计的数控系统的性能。
改进的双线性变换为 D (z) D (s)
(z 1) 0 s tg ( T/ 2) (z 1) 0
5.3 匹配Z变换(又称零极点匹配、根匹配)
设计准则:直接将D(s)的零极点由Z变换 z=esT 映射到Z 平面上,成为D(z)的零极点。
K ( s z K ( z z s i) z i) 1 1 D ( s ) ni D ( z ) ni ( sp ( zp i) i)
1( t )
D(s)
u(t )
1( t )
1 * (t )
u * (t )
D(z)
分析保持器等效法的特点:
D(s)与D(z)极点按Z变换定义一一对应 若D(s)稳定,D(z)稳定;
z=esT;
D(z)与T有关;
D(s)与D(z)频率特性不同; D(s)与D(z)零点不是按
z=esT 一一对应的。
设计准则为: 波 使 器 D ( s 模 ) 和 拟 数 滤 字滤 D ( z ) 波 在所要求的频 有 率 相 点 同 上 的 具 频率特性 即 D ( s )sj D ( z )z T。 0 0 ej
2 T 0 2 ( ej 1 ) T 0 j A 0 A j T 0 tg ( T /2 )2 T ( e 1 ) 0
第5章 数字控制系统的 连续——离散化设计
计算机仿真技术基础第4章连续系统模型的离散化处理方法

1 S2
Z 1 TZ
Z • Z 12
T Y(Z) Z 1 U(Z)
Z反变换得差分方程:
y(n 1) y(n) Tu(n)
2)选用一阶保持器
Gh ( S )
T 1 TS 1
e TS S
2
离散化传递函数 G(Z ) Gh(S )G(S )
T
1
TS
1
e TS S
2
1
S
Y CX DU
t
状态方程的解 X (t) (t)X (0) (t )Bu( )d
采用零阶保持器对状态空间表达0式进行离散化处
理
u(t )
u(k )
零阶 保持器
u~(k )
x Ax Bu
x
~x
对e A于T X连(K续T解)
eX A( t()K1)T( tX) X(0(0))
t
根据Z变换理论,S域到Z域的最基本的
映射关系是:
Z
eTs
或
s 1 ln Z T
其中T是采样周期
若直接将这个映射关系代入G(S)得到G(Z)将 会很复杂,不便于计算,实际应用中是利用Z变 换理论的基本映射关系进行简化处理,得到近似 的离散模型。
4.1.1 简单替换法
由幂级数展开式:
eTx 1 Tx (Tx)2 (Tx)n
y(n 1) y(n) T [u(n 1) u(n)] 2
4.2 离散相似法
4.2.1 离散相似法的概念
离散相似法将连续系统模型处理成与之等效 的离散模型的一种方法。设计一个离散系统模型, 使其中的信息流与给定的连续系统中的信息流相 似。或者是根据给定的连续系统数学模型,通过 具体的离散化方法,构造一个离散化模型,使之 与连续系统等效。
连续系统模型的离散化处理方法课件
离散系统模型
离散系统模型是指系统的状态变化在时间上是离散的,即只在特定的时间点上 发生变化。其输入和输出信号也是离散的。这种模型通常用差分方程进行描述 。
离散化的定义及其必要性
离散化定义
离散化是将连续时间信号或系统转换为离散时间信号或系统 的过程。它涉及对连续信号的采样以及将微分方程转换为差 分方程。
数值积分法
数值积分法使用数值方法求解微分方程的解,并将连续时间微分方程转换为离散时间差分 方程。常用的数值积分法包括欧拉法、龙格-库塔法等。
z变换法
z变换法是一种在复平面上进行的离散化方法。它通过将连续时间信号的拉普拉斯变换转 换为z变换,将连续系统的传递函数转换为离散系统的传递函数。
02
常用的连续系统模型离散化方 法
03
提高精度的方法
为了提高离散系统的精度,可以采用更小的离散化步长, 使用更高阶的数值积分方法,或者采用自适应离散化技术 等。此外,还可以通过增加离散点的数量和优化插值方法 来实现更高精度的离散化。
效率问题
效率定义
离散化对效率的影响
提高效率的方法
效率问题涉及离散化过程的计算复杂 度和计算资源消耗。
改进型龙格-库塔法
针对经典四阶龙格-库塔法的不足进行 改进,如变步长龙格-库塔法等,以提 高数值解的精度和稳定性。
牛顿法
基本牛顿法
利用泰勒级数展开,将非线性方程线性化,通过迭代求解线性方程组来逼近非线 性方程的解。该方法收敛速度快,但初始值选取对结果影响较大。
牛顿-拉夫逊法
结合牛顿法和拉夫逊法的特点,通过迭代过程中修改雅可比矩阵,提高求解速度 和精度。该方法适用于大规模非线性系统的求解。
THANKS。
保持稳定性的方法
常用的保持稳定性的方法包括选择合适的离散化步长、使用稳定性更好 的数值积分方法等。此外,还可以通过引入阻尼项或者采用隐式离散化 方案来提高离散系统的稳定性。
离散系统模型是指系统的状态变化在时间上是离散的,即只在特定的时间点上 发生变化。其输入和输出信号也是离散的。这种模型通常用差分方程进行描述 。
离散化的定义及其必要性
离散化定义
离散化是将连续时间信号或系统转换为离散时间信号或系统 的过程。它涉及对连续信号的采样以及将微分方程转换为差 分方程。
数值积分法
数值积分法使用数值方法求解微分方程的解,并将连续时间微分方程转换为离散时间差分 方程。常用的数值积分法包括欧拉法、龙格-库塔法等。
z变换法
z变换法是一种在复平面上进行的离散化方法。它通过将连续时间信号的拉普拉斯变换转 换为z变换,将连续系统的传递函数转换为离散系统的传递函数。
02
常用的连续系统模型离散化方 法
03
提高精度的方法
为了提高离散系统的精度,可以采用更小的离散化步长, 使用更高阶的数值积分方法,或者采用自适应离散化技术 等。此外,还可以通过增加离散点的数量和优化插值方法 来实现更高精度的离散化。
效率问题
效率定义
离散化对效率的影响
提高效率的方法
效率问题涉及离散化过程的计算复杂 度和计算资源消耗。
改进型龙格-库塔法
针对经典四阶龙格-库塔法的不足进行 改进,如变步长龙格-库塔法等,以提 高数值解的精度和稳定性。
牛顿法
基本牛顿法
利用泰勒级数展开,将非线性方程线性化,通过迭代求解线性方程组来逼近非线 性方程的解。该方法收敛速度快,但初始值选取对结果影响较大。
牛顿-拉夫逊法
结合牛顿法和拉夫逊法的特点,通过迭代过程中修改雅可比矩阵,提高求解速度 和精度。该方法适用于大规模非线性系统的求解。
THANKS。
保持稳定性的方法
常用的保持稳定性的方法包括选择合适的离散化步长、使用稳定性更好 的数值积分方法等。此外,还可以通过引入阻尼项或者采用隐式离散化 方案来提高离散系统的稳定性。
最新第5章数字控制系统的连续——离散化设计PPT课件

(5)再设计
重新选择采样周期。
当T0.5s时 , D(z)8.0z6(4z0.60.096551), 2
Gd(z)(0z.011)2((zz300.9.9581))3, 2H(z)
0.099(1z40.98)3, z2 1.507z40.704
p1,2 0.839426.08,
相应于 0.36,n 0.97的 5 连续系统,
2 增益 Kz的设计准 : 则是 D(s)与D(z)在 同 一 类 型 响 信 应 号 的 输 终 入 值 下
限 值 ) , 在 值 采 相 样 等 点 。 上 的
li s( m s D ) R ( s ) li ( z m 1 ) D ( z ) R ( z )
s 0
z 1
注意,匹配 Z变换在如下情况下不宜采用:若 D(s) 具
有共轭复数零极点 s=±jω0 ,且其位于S主频带之外,则
设计之D(z) 将产生混叠。
零极点匹配说明:
1. D (s)分子分m 母 n同 ,阶 则, 零极 z变 点 换 一 2. D(s)分子分母不同 m阶n,
(1)将nm个 零 点 匹z配 0处 到, 相 当 于D(认 s)在为实 轴
处 有 nm个 零 点 。
810.25s
2 .5
10.1s
s2
-40 -20
4 5.5
10
ω
-40
( 1)选择采 T样周期
从系统 bo 开 图 de环 求得开环剪 c 切 5.5r频 a/ds, 率 按经验 s 取 6~1 0c,考虑实T 时 0性 .01, s。 5 取
( 2 ) D ( z ) 设 D ( s ) 8 计 1 0 .2 s 5 2s 0 4 1 0 .1 s s 10
重新选择采样周期。
当T0.5s时 , D(z)8.0z6(4z0.60.096551), 2
Gd(z)(0z.011)2((zz300.9.9581))3, 2H(z)
0.099(1z40.98)3, z2 1.507z40.704
p1,2 0.839426.08,
相应于 0.36,n 0.97的 5 连续系统,
2 增益 Kz的设计准 : 则是 D(s)与D(z)在 同 一 类 型 响 信 应 号 的 输 终 入 值 下
限 值 ) , 在 值 采 相 样 等 点 。 上 的
li s( m s D ) R ( s ) li ( z m 1 ) D ( z ) R ( z )
s 0
z 1
注意,匹配 Z变换在如下情况下不宜采用:若 D(s) 具
有共轭复数零极点 s=±jω0 ,且其位于S主频带之外,则
设计之D(z) 将产生混叠。
零极点匹配说明:
1. D (s)分子分m 母 n同 ,阶 则, 零极 z变 点 换 一 2. D(s)分子分母不同 m阶n,
(1)将nm个 零 点 匹z配 0处 到, 相 当 于D(认 s)在为实 轴
处 有 nm个 零 点 。
810.25s
2 .5
10.1s
s2
-40 -20
4 5.5
10
ω
-40
( 1)选择采 T样周期
从系统 bo 开 图 de环 求得开环剪 c 切 5.5r频 a/ds, 率 按经验 s 取 6~1 0c,考虑实T 时 0性 .01, s。 5 取
( 2 ) D ( z ) 设 D ( s ) 8 计 1 0 .2 s 5 2s 0 4 1 0 .1 s s 10
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
连续系统模型的离散化处理方 法
如果要求进行实时仿真,或要求计算工作速 度快时,能在一个采用周期内完成全部计算 任务,这就需要一些快速计算方法。
数值积分法:将微分方程转换成差分方程, 这中间是一步步离散,每一步离散都用到连 续系统的原模型,这样的速度就慢了。
本章方法:先对连续模型进行离散化处理, 得到一个“等效”的离散化模型,
Gz
yz uz
zGh
sGs
Gs k
sa
Gh
s
1
eTS s
Gz
k a
1 eaT z eaT
Z域离散相似模型
Z反变换得差分模型
yn 1 e ay Tnk1e aT un a
主要步骤
A 画出连续系统结构图 B 加入虚拟采样开关,选择合适的信号重构
器 C G(S)与Gh(S)串联,z变换—G(Z) D Z反变换—差分方程 E 根据差分方程编制仿真程序
设一个连续系统,u(t)-输入,y(t)-输 出
在I/O端人为地加上两个采样开关,信号重构 器(滤波器)--虚拟
重构器所能保持和延续的规律是不可能与原 来的输入信号u(t)完全一致的
Y(t)的近似能否精确复现y(t)
取决于u(t)的近似能否精确地复现u(t)
仿真精度主要取决于采样周期Ts的大小、 信号重构器的特性
2 仿真计算过程
基本计算单元:各环节的离散化模型 K个环节,K个离散状态方程,K个输出方程 A 根据状态向量初值X(0)以及输出向量初
值Y(0),算出所有环节的输入 B 由X(0)、U(0)、U’(0)按离散状态方
程,算出所有的状态量 由状态量、输入量,按输出方程算出所有的
输出,到此,完成一步;在此基础上,进行 下一步,一直进行,直到仿真完成。
3 仿真程序框图
基本思路: 各环节进行分类编号 计算各环节离散状态方程系数矩阵 依据各环节的连接关系及外部作用函数 计算各环节的输入函数u、u’ 依据各环节的两个方程计算各环节当前一步
一、派德近似公式(PADE)
e x
p x q x
m 1 n 2
1 1 x
e x
1
2
3 x
1
x2
3
3 2!
二、简单替换法
当m=0,n=1,x=TS时,e-(-TS)=1+TS 即Z=1+TS 这是一种简单替换方法,又称欧拉映射法。 举例
三、双线性替换法
1 替换关系:
1 TS
Z
以后每一步计算都在这个离散化模型基础上 进行,原来的模型不再参与计算
这种方法,得到了简化的模型,便于在计算 机上求解,且使计算速度加快
4.1替换法
基本思想:设法找到S域到Z域的某种映射关 系,将G(S)转换成G(Z),再进行Z的反 变换,求得差分方程,据此便可以快速求解
S域到Z域的最基本映射关系是:Z=eTS(T— 采样周期)如果直接代入G(S)求G(Z) 很麻烦,则将Z=eTS作简化处理
2 典型环节离散相似模型
A 积分环节 B 一阶环节 C 二阶环节
三、时域离散相似法原理
1 状态方程的离散相似法描述
xtAxtBut
xteAxt0teAtBud 0
xkTeAkTx0 kTeAkTbu d 0
xkTT eAkTTx0 kTTeAkTTBu d 0
1
2 TS
2
S 2(Z 1) T (Z 1)
G(S)Y(S) 1 U(S) s*s3s2
2 高阶系统双线性替换计算机程序的自动实现 3 双线性替换性能评价: 稳定性 精度 保持模型的阶次不变 频率特性近似 G(S)的稳定增益不变 具有串联性 高阶系统能程序实现
4.3 离散相似法系统仿真
两种形式:传递函数的离散化相似处理— 离散传递函数;连续状态方程的离散相似 处理—离散化状态方程
二、Z域离散相似方法
1 基本方法
G z
y z u z
z G h s G s
1
z
s a
z exp( aT )
e TS 1 z
1 z
s
z 1
1
Tz
s* s
( z 1 )( z 1 )
xkTTeATxkT TeATBud离散形式 0
A 当输入函数u(KT)在两采样 点间保持不变时
TeAT
m T
T eATA Bd
0
xKTTTxKTmTUKT
x(k 1) TxkmTUk
B 当输入函数u(KT)在两采样 点间线性变化时(一阶保持)
uuKTukT
p
T
TeATABd
0
xkTTTxkTmTUkTpTUkT
离散相似法:将连续系统的G(S)模型进行离散, 得到各环节的离散化模型,再对等价的离散化 模型进行仿真计算
特点:按环节进行离散,每计算一个步长,每个 环节都独立按输入计算输出,非线性环节也易 包含进去的-可对含非线性环节的连续系统 进行仿真.
一、基本思路
设计一个离散系统模型,使其中的信息流与 给定的连续系统中的信息流相似
T eAT 1
mT
T eATA B d KT
0
p T
T eATA Bd 1 KT2
0
2
积分环节的离散状态方程和---
xn1
xn
KTU n
KT2 2
Un
Yn1 xn1
B 比例积分环节
Gs kb k A 0 B k
s
xt kut
yt xtkbut
离散模型
xn1
xn
k
TUn
kT2 2
xk1TxkmTUkpTUk
当连续系统状态方程系数A、B已知时,
可求出……
此法相比于数值积分法;只要T不变,三个系 数均不变,可以在仿真前预先计算好,这样 就减少了以后的计算工作量。
2 典型环节的离散状态方程
A 积分环节:G(S)=K/S
其状态方程:X’=Ku
输出方程:y=x
其中:A=0,B=K
Un
yn1 xn1 kbUn kbTUn
C 惯性环节
G(S) k Aa Bk as
yn1 xn1
D 超前-滞后环节
Gskkbs
as
yn1 baxn1kUn kTUn
四、采用离散化模型的系统仿真
把各个环节有机地连接起来。 1 连接矩阵(面向结构图)
1
2
-
-
4
6
5
3 -
a
u1 u2 u3 u4 u6
y0 y1 y2 u5 y5
y6 y4 ay 5 y3
u1
u
2
u
3
u 4
u
5
u 6
1 0 0
0
1
0
0 0 1
0 0 0
0 0
0 1
0 a
1 0 0
y0 y1
5 6
连接方程
U=w yK U—输入向量 YK—输出向量 W—连接矩阵
如果要求进行实时仿真,或要求计算工作速 度快时,能在一个采用周期内完成全部计算 任务,这就需要一些快速计算方法。
数值积分法:将微分方程转换成差分方程, 这中间是一步步离散,每一步离散都用到连 续系统的原模型,这样的速度就慢了。
本章方法:先对连续模型进行离散化处理, 得到一个“等效”的离散化模型,
Gz
yz uz
zGh
sGs
Gs k
sa
Gh
s
1
eTS s
Gz
k a
1 eaT z eaT
Z域离散相似模型
Z反变换得差分模型
yn 1 e ay Tnk1e aT un a
主要步骤
A 画出连续系统结构图 B 加入虚拟采样开关,选择合适的信号重构
器 C G(S)与Gh(S)串联,z变换—G(Z) D Z反变换—差分方程 E 根据差分方程编制仿真程序
设一个连续系统,u(t)-输入,y(t)-输 出
在I/O端人为地加上两个采样开关,信号重构 器(滤波器)--虚拟
重构器所能保持和延续的规律是不可能与原 来的输入信号u(t)完全一致的
Y(t)的近似能否精确复现y(t)
取决于u(t)的近似能否精确地复现u(t)
仿真精度主要取决于采样周期Ts的大小、 信号重构器的特性
2 仿真计算过程
基本计算单元:各环节的离散化模型 K个环节,K个离散状态方程,K个输出方程 A 根据状态向量初值X(0)以及输出向量初
值Y(0),算出所有环节的输入 B 由X(0)、U(0)、U’(0)按离散状态方
程,算出所有的状态量 由状态量、输入量,按输出方程算出所有的
输出,到此,完成一步;在此基础上,进行 下一步,一直进行,直到仿真完成。
3 仿真程序框图
基本思路: 各环节进行分类编号 计算各环节离散状态方程系数矩阵 依据各环节的连接关系及外部作用函数 计算各环节的输入函数u、u’ 依据各环节的两个方程计算各环节当前一步
一、派德近似公式(PADE)
e x
p x q x
m 1 n 2
1 1 x
e x
1
2
3 x
1
x2
3
3 2!
二、简单替换法
当m=0,n=1,x=TS时,e-(-TS)=1+TS 即Z=1+TS 这是一种简单替换方法,又称欧拉映射法。 举例
三、双线性替换法
1 替换关系:
1 TS
Z
以后每一步计算都在这个离散化模型基础上 进行,原来的模型不再参与计算
这种方法,得到了简化的模型,便于在计算 机上求解,且使计算速度加快
4.1替换法
基本思想:设法找到S域到Z域的某种映射关 系,将G(S)转换成G(Z),再进行Z的反 变换,求得差分方程,据此便可以快速求解
S域到Z域的最基本映射关系是:Z=eTS(T— 采样周期)如果直接代入G(S)求G(Z) 很麻烦,则将Z=eTS作简化处理
2 典型环节离散相似模型
A 积分环节 B 一阶环节 C 二阶环节
三、时域离散相似法原理
1 状态方程的离散相似法描述
xtAxtBut
xteAxt0teAtBud 0
xkTeAkTx0 kTeAkTbu d 0
xkTT eAkTTx0 kTTeAkTTBu d 0
1
2 TS
2
S 2(Z 1) T (Z 1)
G(S)Y(S) 1 U(S) s*s3s2
2 高阶系统双线性替换计算机程序的自动实现 3 双线性替换性能评价: 稳定性 精度 保持模型的阶次不变 频率特性近似 G(S)的稳定增益不变 具有串联性 高阶系统能程序实现
4.3 离散相似法系统仿真
两种形式:传递函数的离散化相似处理— 离散传递函数;连续状态方程的离散相似 处理—离散化状态方程
二、Z域离散相似方法
1 基本方法
G z
y z u z
z G h s G s
1
z
s a
z exp( aT )
e TS 1 z
1 z
s
z 1
1
Tz
s* s
( z 1 )( z 1 )
xkTTeATxkT TeATBud离散形式 0
A 当输入函数u(KT)在两采样 点间保持不变时
TeAT
m T
T eATA Bd
0
xKTTTxKTmTUKT
x(k 1) TxkmTUk
B 当输入函数u(KT)在两采样 点间线性变化时(一阶保持)
uuKTukT
p
T
TeATABd
0
xkTTTxkTmTUkTpTUkT
离散相似法:将连续系统的G(S)模型进行离散, 得到各环节的离散化模型,再对等价的离散化 模型进行仿真计算
特点:按环节进行离散,每计算一个步长,每个 环节都独立按输入计算输出,非线性环节也易 包含进去的-可对含非线性环节的连续系统 进行仿真.
一、基本思路
设计一个离散系统模型,使其中的信息流与 给定的连续系统中的信息流相似
T eAT 1
mT
T eATA B d KT
0
p T
T eATA Bd 1 KT2
0
2
积分环节的离散状态方程和---
xn1
xn
KTU n
KT2 2
Un
Yn1 xn1
B 比例积分环节
Gs kb k A 0 B k
s
xt kut
yt xtkbut
离散模型
xn1
xn
k
TUn
kT2 2
xk1TxkmTUkpTUk
当连续系统状态方程系数A、B已知时,
可求出……
此法相比于数值积分法;只要T不变,三个系 数均不变,可以在仿真前预先计算好,这样 就减少了以后的计算工作量。
2 典型环节的离散状态方程
A 积分环节:G(S)=K/S
其状态方程:X’=Ku
输出方程:y=x
其中:A=0,B=K
Un
yn1 xn1 kbUn kbTUn
C 惯性环节
G(S) k Aa Bk as
yn1 xn1
D 超前-滞后环节
Gskkbs
as
yn1 baxn1kUn kTUn
四、采用离散化模型的系统仿真
把各个环节有机地连接起来。 1 连接矩阵(面向结构图)
1
2
-
-
4
6
5
3 -
a
u1 u2 u3 u4 u6
y0 y1 y2 u5 y5
y6 y4 ay 5 y3
u1
u
2
u
3
u 4
u
5
u 6
1 0 0
0
1
0
0 0 1
0 0 0
0 0
0 1
0 a
1 0 0
y0 y1
5 6
连接方程
U=w yK U—输入向量 YK—输出向量 W—连接矩阵