阵列信号处理的基本知识PPT课件
合集下载
阵列信号处理技术
动通信的用户很多,一方面通过空间不同位置进行区分,另 一方面通过不同的编码等方法实现多用户和大容量。 现代超分辨技术,使系统能够分辨空间和时间上都很靠 近的信号。
概括起来说:
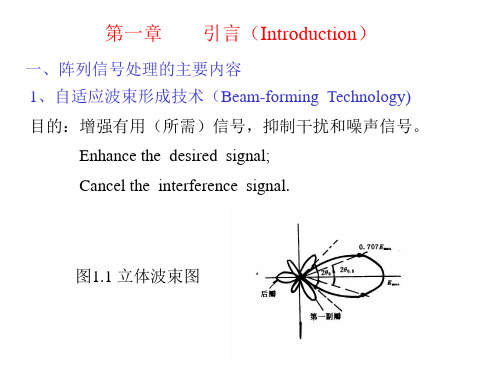
波束的控制和管理
时间和空间信号的高分辨 五、主要研究内容 1、阵列构形研究 均匀直线阵、平面阵、元阵、随机阵、共形阵。 2、波束形成和超分辨新方法的研究(不是热点)
军用雷达:
火炮雷动:炮位侦校雷达、炮瞄雷达
战场侦察雷达:(坦克、直升机等目标的检测与识别)
步兵侦察雷达:
空中警戒雷达:(对空监视雷达) 机载雷达气象雷达: 天气预报、人工降雨)
探地雷达: (探测地下管道,检查高速公路施工质量,
接收信号
X T = [ x1 , x 2 , L , x N ]
(2.1.1)
方向图形成网络: W = [ w1 , w 2 , L , w N ]
(2.1.2)
(形成最优权 和系统输出)
y(t ) = W T X = X T W
(2.1.3)
自适应处理器: ( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题:
0 ≤ t ≤ T
(2.2.5)
所需信号和噪声的矢量可以表达为:
s1 (t ) S (t ) = 2 M s N (t )
n1 (t ) n (t ) = 2 M n N (t )
0 ≤ t ≤ T
所需信号分量可精确已知,粗略近视已知,或仅在统计意 义上已知。
3、理想的传播模型
3、应用性研究(热点)
在一个具体的领域或工程项目上,如何应用这些理论和
方法,实际系统的误差很大,比如阵列通道之间的性能差异, 频率特性,阵列传感器的位置误差等情况下的一些理论算法 和性能。
第8章 阵列信号处理与空域滤波

sK
n
vM
1
n
以后讨论没特殊说明均设各阵元的噪声为零均值, 方差为 2的高斯白噪声,不同阵元的接收噪声相互独立 且信号与噪声也相互独立 ,即
Ev n 0
Ev nvH l 2I n l EsnvH l 0
e j
s
t
xM 1 t
e
j
(
M
1)
定义列向量 xt x0 t x1 t
xM 1 t T
和 a 1 e j
e jM 1 T ,
2 d sin
(8.1.8)可表示为 x t a s t a s t e j0t
12
阵元 pmn 对参考点(坐标原点)时延
mn
pmn , r c
mdx sin cos ndy sin sin
c
(8.1.26)
信号相移为
mn
,
2
mdx sin cos ndy sin sin
mx ny
m 0,1, , M 1, n 0,1, , N 1
(8.1.7)
定义空间相位 2 f0d sin c 2 d sin
( f0 是入射信号载波频率,l 是波长,c f0 )
4
取 m = 0,1,L ,M - 1 , (8.1.7)写为向量形式
x0 t 1
x1 t
(8.1.8)
(8.1.9) (8.1.10)
向量 a 称为方向向量或导向向量(steering vector)
阵列信号处理第一讲04_03_10

•
离散的空间阵列(Array)
5
阵列处理问题的示意图
6
阵列信号处理的研究内容
• 阵列的配置(configuration)
• 信号的空时特征(Spatial and Temporal Characteristics) • 干扰的空时特征
• 阵列信号处理的目的
7
一、阵列的配置
(1) 每个天线阵元的方向性
频域形式为:
46
我们定义上式右端为频率—波数响应函数:
波束方向图(Beam Pattern):
我们假设信号是一个带通信号:
对于(2.13)中的平面波信号,我们有:
47
在很多情况下,信号的复包络的带宽很小,满足:
我们定义: 为了满足(2.46)式的条件,我们需要:
我们称满足上述条件的信号为:窄带信号
均匀加权权值: 频率-波数函数为:
或者:
56
也可以写成:
可视区域内的波束方向图几种表示方法:
57
58
其中:
59
60
61
波束方向图的主要参数:
(1)3-dB波束宽度(半功率波束宽度,HPBW) (2)第一个零点之间的距离(BWNN)
(3)到第一旁瓣的距离
(4)第一旁瓣的高度
(5)其余零点的位置
N为奇数时,可以写成:
该共扼对称性质可以用于简化运算量和改进性能。例 如,当权值也是共扼对称时,波束方向图为:
54
如何构造一个特定波束方向图
由于: 我们可以选择特定的N个点,使满足 : 则定义: 和: 则: 注意: (1)我们是在N个点上满足要求; (2)上述推导过程适合于任意阵列。
55
2.4 均匀加权线性阵列
阵列信号处理
三、阵列信号处理的发展史
1936年 只有三十多年的历史 Wiener滤波 多维信号处理 自60年代以来,经历了三大阶段: 自适应波束控制 IEEE Trans AP 1964.3 自适应零点控制 IEEE Trans AP 1976.9 空间谱估计 IEEE Trans AP 1986.3 雷达 空域信号处理 基本理论:
2 rs r , t t
2
2 rs r , t 1 c t 2
近场 远场
A 单频解为:s r , t r exp[ j t kr ]
该解可以解释为自原点向外传播 的球面波,任何时刻恒等相位平 面为 r =常数的球面上。
e
jt
图1.2
T n n 0
任意周期函数 s u , 周期 T 2 由Fourier理论可知, 0
1 sn s u e jn0u du 都可以用上述级数表示,其中数 。 T0
T
这时 s r , t s t r 表示了具有任意波形的传播周期 波,波传播方向为 ,速度为 c 1 。波的各种分
实际信号实现如图1.3:
j t
s t
LP
实部信号(I)
cos 0t
LP
sI a t cos t sQ a t sin t
虚部信号(Q)
sin 0t
图1.3:信号实现
2)
窄带信号空域表示
假设在坐标原点的传播波为窄带信号,用复数形式 表示为: s 0, t zB t e j0t 沿方向 传播到 r 时,
s r , t zB t r e
T
新版第六章-阵列处理机课件.ppt

系列 560Mflops 峰 值 性 与Fortran90标准有
能
关的Fortran-plus
6
阵列处理机的构形与特点
分布式存储器的阵列处理机构形 集中式共享存储器的阵列处理机构形
一台阵列处理机由五个部分组成
多个处理单元PE 多个存储器模块M 一个控制器CU 一个互连网络ICN 一台输入输出处理机IOP
α+1单元中, 0≤i≤7。
30
循环
K=0
K=1
K=2
PE0 A0
0
PE1 A1
0,1
PE2 A2
1,2
PE3 A3
2,3
PE4 A4
3,4
PE5 A5
4,5
PE6 A6
5,6
PE7 A7
6,7
0
0
0,1
0,1
0~2
0~2
0~3
0~3
1~4
0~4
2~5
0~5
3~6
0~6
4~7
0~7
31
阵列处理机的缺点
10 C(I,J)=C(I,J)+A(I,K)*B(K,J) 说明
SISD算法需8*8*8=512次运算
23
矩阵乘 (续)
SIMD算法: DO 10 I=0,7 C(I,J)=0 DO 10 K=0,7
10 C(I,J)=C(I,J)+A(I,K)*B(K,J) 说明
SIMD算法需8*8=64次运算
5
Thinking Machines公
司CM-2
65536 个 PE 排 成 10 维超立方体, 每个 PE 可 有 1M 位 存 储 器 , 32 个 PE 共 享 FPU 选 件 , 峰 值 速 度28 Gflops和持续 速度5.6 Gflops
阵列信号处理1-2
)] = ξ[W (t )] = d (t) 2rXd (t)W (t )
2 2 T
+ W (t ) RXX (t )W (t )
T
(2.2.3 )
将上式对变量 W(t)求导数并使之等于零
ξ[W (t )] = 2rXd (t ) + 2RXX (t )W (t ) Wopt = RXX rXd
多径信号:有用信号经过多次反(散)射进入接收机的信号. 2,信号模型:
① 随机信号 例如:舰船发动机的噪声,推进器的噪声,未知的通信 信号,传感器热噪声,环境噪声,干扰信号,本质上都是随 机的.这些噪声都典型地来自大量独立微弱源的合成效应, 故应用统计学中心极限定理,可取合成噪声信号的数学模型 为高斯(Gauss)随机过程(通常是平稳高斯随机过程). 高斯信号的统计学性质特别有利于分析计算,因为高斯随机 过程的一阶矩和二阶矩给出了这种随机信号的全部信息特征. 来源:大量独立微弱源的合成效应.(未知的通信信号传感 器热噪声,环境噪声,干扰……等) 模型:Gauss平稳随机过程 参数:均值,方差
(2.1.1) (2.1.2) (2.1.3)
T 方向图形成网络: W = [ w1 , w 2 , L , w N ]
(形成最优权 和系统输出) 自适应处理器:
y (t ) = W T X = X T W
( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题: min s.t
4,有利于多目标远距离的检测和跟踪 (Multiple targets detection and traction) 阵元数越多,天线孔径越大,波束及空间谱分辨率越高. 同时自由度增大.增加形成的主波束数量,实现对多目标的跟 踪.另一方面,也可以增加抑制干扰的数量. 三,自适应阵列信号处理的发展历史 自适应波束形成技术的研究主要在六十年代到七十年代, 到七十年代末已经基本成熟. 空间谱估计:主要是超/高分辨空间谱估计技术,从七 十年代到八十年代末期. 八十年代到九十年代,主要研究如何在实际系统中应用
2 2 T
+ W (t ) RXX (t )W (t )
T
(2.2.3 )
将上式对变量 W(t)求导数并使之等于零
ξ[W (t )] = 2rXd (t ) + 2RXX (t )W (t ) Wopt = RXX rXd
多径信号:有用信号经过多次反(散)射进入接收机的信号. 2,信号模型:
① 随机信号 例如:舰船发动机的噪声,推进器的噪声,未知的通信 信号,传感器热噪声,环境噪声,干扰信号,本质上都是随 机的.这些噪声都典型地来自大量独立微弱源的合成效应, 故应用统计学中心极限定理,可取合成噪声信号的数学模型 为高斯(Gauss)随机过程(通常是平稳高斯随机过程). 高斯信号的统计学性质特别有利于分析计算,因为高斯随机 过程的一阶矩和二阶矩给出了这种随机信号的全部信息特征. 来源:大量独立微弱源的合成效应.(未知的通信信号传感 器热噪声,环境噪声,干扰……等) 模型:Gauss平稳随机过程 参数:均值,方差
(2.1.1) (2.1.2) (2.1.3)
T 方向图形成网络: W = [ w1 , w 2 , L , w N ]
(形成最优权 和系统输出) 自适应处理器:
y (t ) = W T X = X T W
( 例如MVDR:Minimum Variance Distortionless Response) 求解约束性问题: min s.t
4,有利于多目标远距离的检测和跟踪 (Multiple targets detection and traction) 阵元数越多,天线孔径越大,波束及空间谱分辨率越高. 同时自由度增大.增加形成的主波束数量,实现对多目标的跟 踪.另一方面,也可以增加抑制干扰的数量. 三,自适应阵列信号处理的发展历史 自适应波束形成技术的研究主要在六十年代到七十年代, 到七十年代末已经基本成熟. 空间谱估计:主要是超/高分辨空间谱估计技术,从七 十年代到八十年代末期. 八十年代到九十年代,主要研究如何在实际系统中应用
阵列信号处理 ARRAY
智能天线技术
波束成形
– 天线单元之间的间距小于半个波长 – 发射机和接收机必须预知方向 – 在蜂窝系统中通过形成的,窄波束减少干扰
从而增加复用系数,增加系统容量 – 通过天线增益,降低发射功率 – 通过空间滤波抑制可分离的空间干扰,抑制
时延扩展、减少瑞利衰落,对于衰落没有分 集增益。
阵列流形(1)
空间复用
利用空间散射信道,在各个收发天线对之间 形成多路独立的传输信道。
传输相同数据可以提高传输可靠性
传输不同的数据可以提高传输容量
Transmit
Receive
M elements
N elements
文章结构与框架
引言 MIMO—OFDM系统模型 自适应半盲波束形成算法
分布多天线阵
阵列信号处理的系统分类
有源系统 –具有发射传感器阵的系统
无源系统 –不具有发射传感器阵的系统
阵列信号处理主要研究什么
超分辨
在传感器阵列的物理孔径一定的条件下,通 过信号处理,获得比常规的波束形成器处理方
法高得多的空间分辨率。 自适应
如何能在复杂的干扰背景下最优地检测信号。
5、结论(2)
此外,这种算法充分利用了OFDM的导 频特性,波束形成器能自适应调整权矢 量,其更新方式与TDMA和CDMA相似, 所以本算法可直接用于有天线阵列基于 OFDM的第三代和以后的无线通信系统, 在多天线通信系统的矩阵信道估计和提 高天线增益方面有广泛的应用前景.
盲波束形成
早期的盲波束形成技术依赖方向估计 方向估计分为参数化方法和非参数化方
法两大类 非参数化方法是基于谱的方法
——以空间角为自变量分析到达波的空 间分布(空间谱)
宽带阵列信号处理共118页
MUSIC----多重信号分类法
Music方法步骤: 由阵列数据 估计相关矩阵 对 作特征分解。 用 个大特征值对应的特征矢量构成 或用 个小特征值对应的特征矢量构成 用搜索矢量 向 作投影 计算谱峰: 谱峰与信号强度无关,只反映 与 的正交性。
1
2
3
4
5
6
ISM 算法步骤
ISM算法
仿真条件: 天线阵元数:8 信号中心频率:100MHz 带宽:40MHz 采样率:240MHz 观测时间:0.06827ms 离散频率数:44 信号方向: , SNR:5dB 频域快拍数:64
ISM 算法仿真
ISM算法
ISM算法仿真图
宽带阵列信号的空间谱估计来自MUSIC 与 ESPRIT 比较
MUSIC算法
利用信号和噪声 子空间的正交特性 分辨力高 估计精度高 总体性能优于ESPRIT算法
利用信号子空间的旋转不变特性 计算量小 不需要进行谱峰搜索 实时性好
ESPRIT算法
宽带超分辨估计算法
宽带阵列信号的空间谱估计
应用
涉及雷达、声纳、通信、地震勘探、射电天文以及医学诊断等多种国民经济和军事领域。
研究背景及意义
宽带信号
普遍存在
语音信号 地震信号 声纳信号
形式多样
跳频信号 扩频信号 线性调频 信号
优点
分辨率高 抗干扰能 力强 与背景噪 声相关性弱
军事应用
超宽带 高距离分辨率雷达
宽带阵列信号处理更加受到人们的关注,成为阵列信号处理的主要发展方向。
时,可以使聚焦误差最小。理想聚焦性能不可能达到。
改写上式
表示矩阵的奇异值。
考虑非理想情况,聚焦误差最小的准则
用搜索的方法可以很容易获得最优参考频率。
Music方法步骤: 由阵列数据 估计相关矩阵 对 作特征分解。 用 个大特征值对应的特征矢量构成 或用 个小特征值对应的特征矢量构成 用搜索矢量 向 作投影 计算谱峰: 谱峰与信号强度无关,只反映 与 的正交性。
1
2
3
4
5
6
ISM 算法步骤
ISM算法
仿真条件: 天线阵元数:8 信号中心频率:100MHz 带宽:40MHz 采样率:240MHz 观测时间:0.06827ms 离散频率数:44 信号方向: , SNR:5dB 频域快拍数:64
ISM 算法仿真
ISM算法
ISM算法仿真图
宽带阵列信号的空间谱估计来自MUSIC 与 ESPRIT 比较
MUSIC算法
利用信号和噪声 子空间的正交特性 分辨力高 估计精度高 总体性能优于ESPRIT算法
利用信号子空间的旋转不变特性 计算量小 不需要进行谱峰搜索 实时性好
ESPRIT算法
宽带超分辨估计算法
宽带阵列信号的空间谱估计
应用
涉及雷达、声纳、通信、地震勘探、射电天文以及医学诊断等多种国民经济和军事领域。
研究背景及意义
宽带信号
普遍存在
语音信号 地震信号 声纳信号
形式多样
跳频信号 扩频信号 线性调频 信号
优点
分辨率高 抗干扰能 力强 与背景噪 声相关性弱
军事应用
超宽带 高距离分辨率雷达
宽带阵列信号处理更加受到人们的关注,成为阵列信号处理的主要发展方向。
时,可以使聚焦误差最小。理想聚焦性能不可能达到。
改写上式
表示矩阵的奇异值。
考虑非理想情况,聚焦误差最小的准则
用搜索的方法可以很容易获得最优参考频率。
阵列感应资料处理培训ppt课件
一. 二. 三. 四. 五.
MIT5530仪器结构及技术指标 MIT5530仪器原始曲线质量控制 MIT5530测井不合格原始曲线 MIT5530仪器影响因素及处理流程 MIT5530资料处理质量控制
监控曲线QC判定 测井曲线合理性判定
QC曲线判定:MIT5530仪器质量监控曲线QC数值变化范围应小于10%。且 QC曲线无突变。否则需重新加电测井。 原始曲线合理性判定: MIT5530原始曲线在典型地层情况下应符合理论响应。其典 型地层主要有:均质地层响应,有井眼无侵入厚层,高侵厚层, 低侵厚层情况下理论响应。在判断原始曲线关系时,应选择典型 厚层进行曲线关系分析,如果与理论图版相符,即仪器工作状态 正常。
4.0 3.5 3.0 2.5 子 子 子 子 子 子 子 子 阵列1 阵列2 阵列3 阵列4 阵列5 阵列6 阵列7 阵列8
VGF (1/m)
2.0 1.5 1.0 0.5 0.0 -0.5 -5 -4 -3 -2 -1 0 1 2
3
4
5
z (m)
二维响应特性
二维响应特性反映空间各点对测量信号的贡献大小 井眼附近有正负峰值,不同程度受到井眼影响; 不同径向深度,响应函数具有不同的纵向分辨率,随着 径向深度增加,纵向分辨率下降,即高分辨率信息来自 井眼附近; 不同的纵向位置,响应函数变化很大,在主接收线圈位 置,函数具有最大的正值,在屏蔽线圈位置,函数具有 最大的负值; 短线圈间距子阵列具有高的分辨率,长线圈间距子阵列 具有低的分辨率。
MIT5530阵列感应测井仪培训
技术中心 2009.5.24
一. 二. 三. 四. 五.
MIT5530仪器结构及技术指标 MIT5530仪器原始曲线质量控制 MIT5530测井不合格原始曲线 MIT5530仪器影响因素及处理流程 MIT5530资料处理质量控制