最新原子干涉陀螺仪
原子干涉重力仪测量原理
原子干涉重力仪测量原理今天来聊聊原子干涉重力仪测量原理的事儿。
你看啊,生活中我们对重力都很熟悉,东西会在空中往下落,这就是重力在起作用。
那怎么精确地测量重力呢?这就用到了原子干涉重力仪这么个厉害的东西。
想象一下,原子就像是特别小的乒乓球,而且是用一种特殊的状态存在着的,这种状态就好比是乒乓球被放在了一个特别微妙的磁场或者激光环境下(这个环境可以用一些物理手段来构建,就像我们搭建一个特殊的小型运动场来控制乒乓球一样)。
原子干涉重力仪利用的就是原子的波动性。
这是什么意思呢?我们平常说到波,就像是水池里的涟漪一样。
原子呢,在特定的条件下也会表现出像波一样的特性。
这里就涉及到量子力学的一些知识啦,量子力学就像打开微观世界秘密的一把奇特钥匙,在这个微观世界里啊,很多东西和我们宏观世界的认知不太一样。
老实说,我一开始也不明白这个原子为啥会像波,但随着不断学习才慢慢了解。
比如说,我们用激光来操作这些“微小乒乓球”原子。
激光可以看作是一种特殊的指挥员,它通过一定频率的脉冲来给原子下达指令。
比如先让原子处于一种状态,然后再变到其他状态。
在这个变换过程中呢,原子会产生干涉现象,就像两列水波相遇叠加一样,有的地方增强,有的地方减弱。
重力就会对这种干涉现象产生影响,因为重力会改变原子的波函数(这个波函数有点像描述原子状态的一个说明书),使得干预后的结果发生变化。
通过测量这个变化,我们就能推算出重力的大小啦。
说到这里,你可能会问,这东西有啥用呢?在地质勘探中可就派上了大用场啦!比如说找石油啥的。
地下不同的物质密度不一样,重力也就有细微的差别。
原子干涉重力仪就能精准地检测出这些微小的重力变化,给我们指引哪里可能有石油宝库等。
还有在监测地球板块运动的时候,精确测量重力的变化能够帮助我们更好地理解地壳的微小移动。
不过要做好这一切可不简单,在使用原子干涉重力仪的时候,环境必须十分稳定,一点点的震动或者磁场干扰都可能让测量跑偏,就像乒乓球如果放在一个摇晃很厉害或者旁边有很多磁铁干扰的桌子上,就没法好好玩游戏啦。
干涉式光纤陀螺仪

干涉式光纤陀螺仪引言自从1963年制造出第一个基于Sagnac效应的环形激光陀螺仪(RLG)以来,大量光学陀螺仪得到发展,同时其性能也得到验证,其中包括光纤陀螺仪(FOG)[1]。
从20世纪60年代末,位于华盛顿的美国海军实验室就开始研究光纤陀螺技术,目的是研制出比氦氖环形激光陀螺仪成本更低、制造流程更简单、精度更高的光纤角速率传感器。
经过近几十年各国学者开展的大量研究工作,光纤陀螺仪在航海、军事、空间和民用方面都有较大的应用价值。
本报告简单介绍了干涉式光纤陀螺仪原理,类型以及应用等方面。
一、S agnac效应所有的光学陀螺仪的工作原理均基于Sagnac效应,即利用绕垂直于环面的轴旋转的环形干涉仪中两束相反传播的光信号间相移∆φ,或利用在光腔绕垂直于自身的轴旋转时,两个分别沿顺时针(CW)和逆时针(CCW)方向传播的谐振模式间的频移来实现陀螺仪的测量作用。
[1]为简便分析,首先考虑环形干涉仪内为真空的情况。
在光路中一点放置分光器,当光从该点进入干涉仪后,被分为沿顺时针和逆时针两个方向传播的信号。
当干涉仪相对于惯性坐标系静止时,沿相反方向传播的两束光光程相等,且传播速度均等于c(c为真空中光速)。
经过时间τr,两束光同时回到分光器位置,可求得传播时间τr为:τr =2πRc式中:R为环形干涉仪半径若环形干涉仪以角速度Ω顺时针旋转,则分光器在时间τr内的位移∆l=ΩRτr。
当光在干涉仪中完成一次往返运动时,由于干涉仪转动了一个小角度,环形干涉仪在顺时针方向光束(与Ω方向相同)的光程将略微大于2πR,而逆时针方向光束的光程就将稍小于2πR,顺时针光程L CW与逆时针光程L CCW间的光程差为∆L=L CW−L CCW=2∆l=2ΩRτr=4πΩR2c由于两束光的传播速度相同,均等于真空中的光速c,所以沿逆时针方向的光波先到达分光器处,两束光到达分光器处的时间差等于∆t=∆Lc=4πΩR2c2由干涉仪转动引起的两束光相移∆φ可表示为∆φ=∆t 2πcλ=8π2R2cλΩ式中:λ为光的波长当在有效折射率n eff >1的真实光纤中时,不能直接将c m =cn eff 代入上式。
原子干涉型重力仪的原子团温度

原子干涉型重力仪的原子团温度《原子干涉型重力仪的原子团温度》原子干涉型重力仪,这可是个相当神奇又复杂的玩意儿。
那原子团温度在其中就像是一场神秘聚会里的特殊氛围。
想象一下,原子们就像一群小小的精灵,在原子干涉型重力仪这个特别的舞台上跳舞。
原子团温度呢,就决定了这些小精灵们跳舞的状态。
如果温度太高,这些原子小精灵就像是被热得晕头转向的孩子,到处乱窜,完全没有什么秩序可言。
它们原本应该整齐地参与到干涉这个奇妙的舞蹈动作里,可这一热,就乱了套。
就好比一场精心编排的舞蹈表演,演员们突然被放进了一个闷热的房间,大家都心烦意乱,哪还能好好跳舞呢。
从另一个角度看,要是温度太低了呢。
原子小精灵们又好像被冻僵了,动作变得迟缓,没有了那种灵动的感觉。
就像冬天里,你想让手指灵活地做些精细的动作,比如穿针引线,可手被冻得不听使唤。
原子们也是这样,在过低的温度下,它们难以快速地进行干涉相关的动作,这样一来,原子干涉型重力仪想要准确测量重力就变得困难重重。
我曾经试着去理解原子干涉型重力仪的原理,那真的是如同钻进了一个满是谜题的迷宫。
当了解到原子团温度的影响时,我就感觉像是在迷宫里发现了一个隐藏的机关。
这原子团温度就像是一把隐藏的钥匙,掌握不好,就打不开准确测量重力这个大门。
原子团温度合适的时候,原子们的状态简直完美。
它们就像是训练有素的士兵,在指令下整齐划一地进行干涉动作。
每一个原子都知道自己该做什么,这种有序性就为原子干涉型重力仪的高精度测量提供了绝佳的条件。
就像一群配合默契的工匠,齐心协力打造一件无比精密的艺术品。
在实际操作原子干涉型重力仪的时候,要把原子团温度控制在一个恰到好处的范围可不容易。
这需要各种复杂的设备和精细的调控手段。
就好比要烹饪一道极其精致的菜肴,调料的用量、火候的大小都得精确无比。
原子团温度这个调料要是放多了或者放少了,那最后的结果肯定是不尽如人意的。
原子干涉型重力仪的原子团温度是一个非常关键的因素。
它对整个测量的准确性有着深远的影响。
【CN209485369U】一种零偏自校准原子陀螺仪【专利】
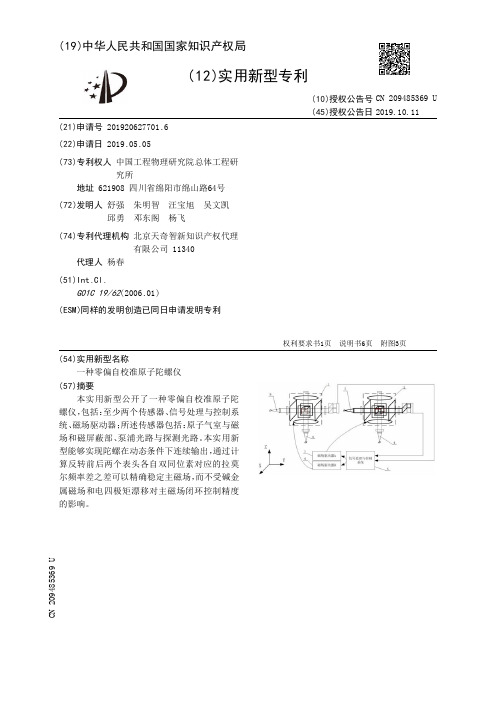
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920627701.6(22)申请日 2019.05.05(73)专利权人 中国工程物理研究院总体工程研究所地址 621908 四川省绵阳市绵山路64号(72)发明人 舒强 朱明智 汪宝旭 吴文凯 邱勇 邓东阁 杨飞 (74)专利代理机构 北京天奇智新知识产权代理有限公司 11340代理人 杨春(51)Int.Cl.G01C 19/62(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种零偏自校准原子陀螺仪(57)摘要本实用新型公开了一种零偏自校准原子陀螺仪,包括:至少两个传感器、信号处理与控制系统、磁场驱动器;所述传感器包括:原子气室与磁场和磁屏蔽部、泵浦光路与探测光路。
本实用新型能够实现陀螺在动态条件下连续输出,通过计算反转前后两个表头各自双同位素对应的拉莫尔频率差之差可以精确稳定主磁场,而不受碱金属磁场和电四极矩漂移对主磁场闭环控制精度的影响。
权利要求书1页 说明书6页 附图3页CN 209485369 U 2019.10.11C N 209485369U权 利 要 求 书1/1页CN 209485369 U1.一种零偏自校准原子陀螺仪,其特征在于,包括:至少两个传感器;信号处理与控制系统,用于磁场补偿计算与拉莫尔进动频率调整;所述信号处理与控制系统设置有零偏观测器,用于零偏误差计算;磁场驱动器,用于传感器磁场调节;所述传感器、信号处理与控制系统、磁场驱动器依次相连;所述传感器包括:原子气室与磁场和磁屏蔽部,用于提供工作原子与均匀稳定的磁场环境;泵浦光路,用于制备原子态;探测光路,用于探测原子拉莫尔进动。
2.根据权利要求1所述一种零偏自校准原子陀螺仪,其特征在于,所述原子气室与磁场和磁屏蔽部包括由内而外设置的原子气室、无磁加热片、线圈与磁屏蔽壳体。
《基于原子干涉仪的超轻标量和矢量暗物质探测方案研究》

《基于原子干涉仪的超轻标量和矢量暗物质探测方案研究》一、引言随着宇宙学和粒子物理的深入发展,暗物质探测已成为现代科学研究的重要课题。
暗物质具有特殊的物理性质,如超轻标量和矢量特性,这使得其探测变得尤为复杂和关键。
近年来,原子干涉仪作为一种高精度、高灵敏度的探测工具,在暗物质探测领域展现出巨大的潜力。
本文将基于原子干涉仪,探讨超轻标量和矢量暗物质的探测方案。
二、原子干涉仪技术概述原子干涉仪是一种利用物质波干涉原理进行测量的技术。
其基本原理是将原子束分裂成两束,然后让这两束原子在空间中传播并发生干涉。
通过测量干涉图样的变化,可以获取关于物理量的信息。
原子干涉仪具有高精度、高灵敏度等优点,可广泛应用于重力、电磁场、物质波等领域的测量。
三、超轻标量暗物质探测方案针对超轻标量暗物质的探测,我们提出以下方案:1. 利用原子干涉仪的超高灵敏度,捕捉暗物质与普通物质之间的相互作用。
通过调整干涉仪的参数,使其对标量暗物质的场产生响应。
2. 设计特定的实验装置,将原子干涉仪置于暗物质可能存在的区域,如宇宙射线、星系间等。
通过长时间的数据采集和统计分析,提高探测的信噪比。
3. 结合数据分析和理论模型,推断出暗物质的存在和性质。
通过对数据的精细处理,我们可以获取更多关于暗物质特性的信息,如质量、相互作用强度等。
四、矢量暗物质探测方案针对矢量暗物质的探测,我们提出以下方案:1. 利用原子干涉仪的矢量敏感性,捕捉矢量暗物质与普通物质的相互作用。
通过调整干涉仪的参数,使其对矢量暗物质的场产生响应。
2. 设计特殊的实验装置,如利用磁场梯度或电场梯度来增强对矢量暗物质的探测效果。
通过精确控制实验条件,减少其他因素的干扰。
3. 结合多组实验数据和理论模型,分析矢量暗物质的性质和分布情况。
通过对数据的综合分析,我们可以更全面地了解矢量暗物质的特性。
五、实验设计与实施在实验设计方面,我们需要考虑以下几个方面:1. 实验装置的设计与搭建:包括原子干涉仪、磁场或电场系统等。
2019冷原子干涉仪及空间应用语文

冷原子干涉仪及空间应用原子干涉仪是利用原子物质波的特性而实现的干涉仪,冷原子具有很小的速度和速度分布以及良好的相干性,因而冷原子干涉仪具有很高的灵敏度.文章介绍了原子干涉仪的基本物理原理?国内外研究进展?原子干涉仪实现方案及其在精密测量和空间科学领域中的应用.冷原子,原子干涉仪,惯性测量Abstract Atom interferometers are based on the matter wave feature of atoms. Cold atoms have low velocity, small velocity distribution and good coherence, thus cold atom interferometers display excellent sensitivity. In this paper, we describe the basic principle, recent progress, realization schemes and space applications of cold atom interferometers. Keywords cold atom, atom interferometers, gravity measurement1 引言波的干涉是自然界的本质特性.光是一种电磁波,光的干涉现象早已被人认识.根据量子理论,任何微观粒子(如电子?中子?原子?分子)都具有波粒二象性,微观粒子的波动性(称为物质波或德布罗意波)由波函数描述,服从薛定谔方程.物质波同样满足线性叠加原理,具有相干性.自从1991年实现了脉冲式原子干涉仪以来[1],原子干涉仪在精密测量领域得到了广泛的应用,典型的应用有重力加速度测量和重力梯度测量[2,3],旋转速率测量和地球自转速率的测量[4,5,6],牛顿引力常数的测量[7—10]以及精细结构常数的测量[11]等.利用原子干涉仪验证等效性原理[12,13]以及原子干涉仪在空间应用已经引起关注[14,15].原子干涉仪基于物质的波动特性,实质是对原子波包的相干操作.将原子波包相干地分束和合束后形成两个或者多个路径,观察这些不可区分路径即产生干涉条纹.操作原子波包的方式有激光驻波形成的衍射光栅结构[16]和受激拉曼光相干分束原子等.由于原子物质波具有与光波不同的内禀特性,基于原子干涉的原子陀螺仪和原子加速度计,可达到的灵敏度远高于激光陀螺仪或激光加速度计.理论上分别求解光波波动方程和物质波的薛定谔方程,可得到同等环路面积条件下,原子陀螺仪与光学陀螺仪灵敏度的比值为??R?gyro=mc2hν=λλ?deBcv ,(1)??其中c为真空中光速,λ是光波波长,ν是光频率,υ为原子的运动速度, m是原子的质量,λ?deB=h/mυ是原子的德布罗意波波长.因为λ?deB ?λ,且υ ? c,故在典型条件下,R?gyro ~ 1010,即原子陀螺仪的内禀灵敏度可比同面积的激光陀螺仪高10个量级.这是由于物质波波长远小于可见光的波长,所以与激光干涉仪相比,原子干涉仪对更小的变化更灵敏;又由于原子的运动速度远慢于光速,因此在原子陀螺仪中,原子飞越相同的干涉路程时将经历更长时间的转动,从而产生更大的条纹移动.类似的分析发现,原子加速度计的内禀灵敏度与光学的比值为??R?accel=2mc2hνcv=2λλ?deB(cv)2 .(2)??在典型条件下,该比值达1017.原子干涉的历史要追溯到20世纪初期,1924年,Hanle在原子蒸汽中研究了持续几十个纳秒的原子相干叠加态[17],随着原子束技术的发展,Stern-Gerlach磁场被用来选择和保存原子在特定的量子态中,1938年,Rabi采用射频共振技术实现了原子内部量子态的改变[18].1949年,Ramsey实现了较长时间原子内部量子态的相干叠加,用分离振荡场技术实现原子内部量子态的相干操作,为实际应用带来重大变化[19],典型应用有原子频率标准,核磁共振波谱和量子信息等.随着冷原子技术的发展,采用冷原子的原子干涉仪得到了迅速发展,1991年,朱棣文用受激拉曼脉冲序列对冷原子内部量子态操作,使原子波包相干分束?反射和合束,原子外部量子态在波包自由演化后通过原子内部量子态进行测量,实现了受激拉曼跃迁式原子干涉仪;2019年,朱棣文又用原子陀螺仪实现了转动的精密测量,精度达到10-8(rad/s)/Hz.法国巴黎大学实现了冷原子自旋-极化干涉仪.美国耶鲁大学继2019年实现了大面积光-脉冲原子干涉仪之后,又于2019年利用原子干涉仪实现了灵敏的重力梯度仪,灵敏度达10-9g /Hz.目前国际上灵敏度最高的原子干涉陀螺仪用热原子束实现[4,6].热原子束的优点是原子数多,可以获得更高的信噪比.从提高灵敏度来讲,得到更大的干涉环路面积需要增加长度或者降低原子速度,热原子束速度很大,通常为每秒几百米,冷原子的速度可以精确地控制在每秒几米左右,在系统集成和小型化方面有着明显优势.冷原子陀螺仪通常采用双环路原子干涉仪的构型实现[5],其优点在于可将系统小型化,同时可以抑制共模噪声和方便提取旋转相移.重力加速度引起的相移为?Δ?=12(k?eff×g)·T2?,T是拉曼脉冲时间间隔,可以通过降低原子速度来增加相移,因此,冷原子在测量重力加速度方面比热原子具有明显的优势.2 原子干涉仪的原理光或原子的波动与干涉可由图1所示的着名的杨氏双狭缝实验来演示.这也是原子干涉仪的基本原理,即不可区分的两条路径的几率振幅叠加的结果将产生干涉.原子干涉仪的运作一般分为几个步骤:原子初态制备?原子波包相干分束?原子波包自由演化?原子波包相干合束?原子末态探测.下面以拉曼型原子干涉仪为例,介绍原子干涉仪的基本物理原理和相关应用.在原子干涉仪中,要相干地对原子波包分束和合束,并保证原子波包在自由演化过程中保持其相干特性,最初原子干涉仪设计类似于光波杨氏双缝干涉仪实验[20,21],但用激光对原子产生的力学效应,使原子在吸收或受激辐射光子的同时得到光子反冲动量,使原子波包分束和合束, 用受激拉曼过程对原子波包相干操作,使原子获得双光子反冲动量,从而增加原子干涉环路的面积,提高原子干涉仪的灵敏度[22—24].4 原子干涉仪在精密测量中的应用冷原子具有质量和传播时间长等特征决定了它在精密测量领域有着独特的优势.原子干涉仪作为惯性传感器可与最好的其他惯性传感器比拟.利用原子干涉仪作为惯性传感器,测量重力加速度的分辨率达到2×10-8(g)/Hz[2],重力梯度仪的分辨率达到4×10-9(g/m)/Hz[3],牛顿引力常数测量不确定度达到±0.003×10-11m3kg-1s-2[9,10],用热原子束实现原子陀螺仪灵敏度达到1.4×10-10rad/s,偏置稳定度达到7×10-5 (°)/h,短期噪声达到3×10-5 (°)/h[4,6].冷原子陀螺仪的灵敏度在10 min平均时间达到1.4×10-7rad/s[5] .5 原子干涉仪空间应用美国斯坦福大学?麻省理工学院等研究单位对原子陀螺仪进行了深入的科学研究,美国宇航局(NASA)启动了空间原子重力梯度仪研制计划,用以精密测量地球重力场.欧洲空间局(ESA)启动了HYPER(hyper-precision cold atominterferometry in space)计划,该计划首次用原子干涉仪作为加速度和转动的传感器来控制飞船(与卫星定位系统连用), 同时进行重力磁效应和量子重力的科学研究,包括精细结构常数的测量和物质波相干等实验[15].HYPER的第一个卫星使命是用冷原子干涉仪作为惯性传感器控制飞船,用4个原子干涉仪组成2个双环路原子陀螺仪测量2个正交方向的加速度和旋转,通过激光控制原子的速度,使2个原子陀螺仪工作在不同模式:粗测和细测.粗测的灵敏度为10-9rad/s ,用作姿态和轨道控制系统(AOCS);细测的灵敏度为10-12rad/s ,用来测量引力效应.HYPER对精细结构常数独立测量不依赖于量子电动力学,预计提高一个量级,用于比较量子电动力学的结果,HYPER将进行引力实验来检验广义相对论的时空弯曲和进行量子引力实验.6 小结利用原子干涉仪可进行精密物理测量,例如:转动?加速度?加速度梯度等.因而,原子干涉仪在导航定位?地下掩体探测?探矿找油等方面有广泛的应用前景.原子干涉仪性能的进一步提高将受到两方面的限制:(1) 由于重力的影响,原子飞行的时间有限,飞行路径包含的面积较小,难以进一步提高灵敏度;(2)在原子动量起伏较大的情况下,不能将原子束等比例地分离到两个路径上,降低了干涉条纹的对比度.因此,除了改善现有原子干涉仪的方案之外,发展全新的技术来解决以上两方面的问题是原子干涉仪未来的主要发展趋势.这包括改善原子束源和寻找操纵原子的新方法.在原子束源方面,采用玻色-爱因斯坦凝聚体进行原子干涉仪研究,可以比采用一般磁光阱中的冷原子具有更长的相互作用时间和更好的信噪比.在原子操纵方面,原子微结构磁囚禁和导引可以极大地提高人们对原子的操纵能力,有利于发展小型化原子干涉仪.参考文献[1]Kasevich M, Chu S. Phys. Rev. Lett., 1991,67:181[2]Peters A, Chung K Y, Chu S. Nature, 2019, 400:894[3]McGuirk J M, Foster G T, Fixler J B et al. 2019, Phys. Rev. A, 65:033608[4]Gustavson T L,Landragin A, Kasevich M A. Class. Quantum Grav., 2019, 17:2385[5]Canuel B, Leduc F, Holleville D et al. Phys. Rev. lett., 2019, 97:010402[6]Durfee D S, Shaham Y K, Kasecich M A. Phys. Rev. Lett., 2019,97:240801[7]Fixler J B, Foster G T, McGuirk J M et al. Science, 2019, 315:5808[8]Bertoldi A, Lamporesi G, Cacciapuoti L et al. Euro. Phys. J. D, 2019, 40: 271[9]Lamporesi G , Bertoldi A, Cacciapuoti L et al. Phys. Rev. Lett., 2019,100:050801[10]Muller H, Chiow S, Herrmann S et al. Phys. Rev. Lett., 2019, 100:031101[11]Weiss D S, Young B C, Chu S. Appl. Phys. B, 1994, 59:217[12]Fray S, Diez C A, Hansch T W et al. Phys. Rev. Lett., 2019, 93:240404.[13]Dimopoulos S , Graham P W, Hogan J M et al. Phys. Rev. Lett., 2019, 98:111102[14]Lee M C, Israelsson U E. Physica B, 2019, 329:1649[15]Jentsch C, Muller T, Rasel E M et al. Gen. Rel. Grav., 2019, 36:2197[16]Delhuille R, Champenois C, Buchner M et al. App. Phys. B,2019,74:489[17]Hanle W. Z. Phys., 1924, 30:93[18]Rabi I, Sacharias J, Millman S et al. Phys.Rev., 1938, 53:318[19]Ramsey N. Phys. Rev., 1949, 76:996[20]Carnal O, Mlynek J. Phys. Rev. Lett.,1991, 66:2689[21]Shimizu F, Shimizu K, Takuma.Proc. SPIE, 1992, 1726:193[22]Kasevich M, Chu S. Appl. Rev. B., 1992, 54:321[23]Petelsk T. Atom Interferometers for Precision Gravity Measurements, Ph. D. thesis, University of Florence, Florence, 2019[24]Gustavson T L. Precision measurement using atom interferometer, Ph.D. thesis, Stanford University, Palo Alto, CA, 2019[25]Moler K, Weiss D S, Kasevich M et al. Phys. Rev. A, 1992, 45:342[26]Li R B, Wang P, Yan H et al.Phys. Rev. A, 2019, 77:033425[27]Wang P, Li R B, Yan H et al. Chin. Phys. Lett., 2019, 24:27[28]Zhan M S et al. J. Phys. Coference Series, 2019, 80:012047,[29]Wang J, Liu X J, Li J M et al. Chin. J. Quantum Electronics, 2019, 17:44[30]Jiang K J, Li K, Wang J et al. Chin. Phys. Lett., 2019, 22:324[31]Peters A, Chung K Y, Chu S. Metrologia, 2019, 38:25[32]Snadden M J, McGuirk J M, Bouyer P K. Phys. Rev. Lett.,2019, 81:971。
原子惯性器件的基本工作原理及主要特点分解课件
原子陀螺仪的结构组成
原子陀螺仪的工作原理是基于原子波干涉的Sagnac效 应的,与激光陀螺原理类似。
这是一个MachZehnder型原子干 涉仪,在这种类型 的干涉仪中,一个 1:1 分束器将入射 波分为均等的两份, 然后利用反射镜分 别使两束波改变方 向,最后将它们在 另一个1:1 的分束 器中重合。
当然,高精度陀螺仪的发展和应用还可以推动 地球物理学,尤其是地震学、测地学以及地壳构造 物理学等领域的发展。
原子加速度计的工作原理也是基于原子干涉,使用 激光冷却等方法使原子实现超级冷却,也称冷原子传感 器。原子加速度计通过感受加速度引起的原子干涉相位 的变化进行加速度测量,来实现超高灵敏度和超高精度。
冷原子是利用原子而不是宏观物体作为检测质量, 所以不仅灵敏度高,一致性好,而且不对温度磁场等环 境因素敏感。
据称,原子加速度计可能成为未来20年最高精度的 加速度计,精度可达10亿分之一。
由于原子干涉仪可有望做出高精度加速度计、也可 有望做出高精度陀螺仪、重力仪/重力梯度仪、原子钟, 因此有千里实现超高精度的具有重力梯度补偿和高精度 时频标的集成惯性导航系统。
采用原子陀螺的相关技术具有实现超高精度的、 具有重力梯度补偿和高精度时频基准的集成惯性导航 系统,实现惯性导航的全部功能的潜力,这也是原子 惯性导航系统成为未来惯性导航系统首选的主要原因。
原子陀螺仪是一个涉及光、电、磁、真空 机械和控制的复杂系统,其关键技术是激 光及其稳频控制技术、真空机械技术、信 号提取和处理技术以及噪声处理等。
原子干涉图 有加速时原子干涉图
当相对转动空间在垂直干涉面积上有一个转动角速度 时,干涉仪的相移为
2A
式中,为波长,对于物质粒子该波长为德布罗意波