CANoe快速入门
Vector CANoe8.2基础操作教程
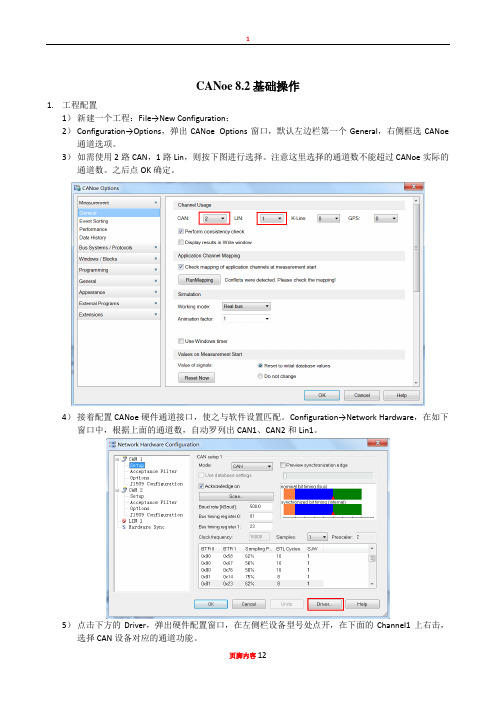
CANoe 8.2基础操作1.工程配置1)新建一个工程:File→New Configuration;2)Configuration→Options,弹出CANoe Options窗口,默认左边栏第一个General,右侧框选CANoe 通道选项。
3)如需使用2路CAN,1路Lin,则按下图进行选择。
注意这里选择的通道数不能超过CANoe实际的通道数。
之后点OK确定。
4)接着配置CANoe硬件通道接口,使之与软件设置匹配。
Configuration→Network Hardware,在如下窗口中,根据上面的通道数,自动罗列出CAN1、CAN2和Lin1。
5)点击下方的Driver,弹出硬件配置窗口,在左侧栏设备型号处点开,在下面的Channel1上右击,选择CAN设备对应的通道功能。
6)之后在Channel1下面的CANoe CAN1上右击可以选择对应的设备通道。
7)配置好后,可以在右侧窗口看到软件中的CAN1对应上了实际设备上的Channel1。
8)工程配置好后,点击File→Save Configuration,以便下次直接加载使用。
2.加载dbc1)点击菜单栏View→Simulation Setup,弹出CAN模拟窗口,在窗口右侧的CAN Network上右击,点Add,输入CAN名称,如PT-CAN,ok后新建出一个PT-CAN总线网络,由于CAN Network下默认已有一个名称为CAN的网络,自动分配了通道CAN1,新建的PT-CAN默认分配了通道CAN2,与CANoe 设备的通道对应。
此时,只有实际连接的CAN线与之前设置的工程配置中分配的CANoe通道相对应,才能读取正确的网络信息。
也可以把系统默认的CAN Network下的第一个CAN重命名,以便区分不同的CAN总线。
注意:如果CANoe设备没有Lin总线接口,一定要把Networks下的Lin Networks删掉。
2)在每个CAN网络下的Databases上右击,点Add,加载相应的dbc文件。
CANoe介绍

CANoe介绍
随着车辆智能化、自动化的程度越来越高,总线在汽车中的
重要程度也随之提高,大量信息需要快速准确的在总线上传输。
传统CAN总线传输速率慢、报文有效利用率低、负载率高等
缺点日益显露,新的车型逐渐会部分采取新的总线技术来适应开
发需求。
车载以太网是新型的总线技术,传输速率>100Mbit/s(高速
CAN速率为500kb/s)。
传统以太网协议开放,应用、接口均成熟,但不适用于车辆复杂的EMC环境,故物理层协议修改,车辆特有的控制类、诊断、网络管理应用协议也需要新增。
C105项目中部分控制器使用了以太网总线。
宝马X5等许多车型,大众的帕萨特、2015款捷豹、路虎的
XF和XG等车型均运用了以太网技术。
在中国,包括一汽、北汽等众多车厂已加入OpenAlliance
以太网联盟。
canoe的使用

canoe的使用一、什么是canoe?Canoe是一款由NXP公司推出的基于Eclipse开发平台的支持多种微控制器的集成开发环境(IDE),主要用于开发和调试嵌入式系统。
它提供了丰富的功能和工具,可以简化嵌入式开发过程,并提高开发效率。
二、Canoe的特点Canoe具有以下特点: 1. 跨平台支持:Canoe可在多种操作系统上运行,包括Windows、Linux和macOS,使得开发者可以根据自己的喜好和需求选择合适的操作系统。
2. 多种微控制器支持:Canoe支持NXP公司的多种微控制器系列,如Kinetis、LPC和i.MX系列,可以满足不同项目的需求。
3. 集成开发环境:Canoe提供了完整的开发工具链,包括编译器、调试器、仿真器等,方便开发者在一个环境中完成整个开发过程。
4. 丰富的插件和扩展:Canoe支持各种插件和扩展,可以为开发者提供更多的功能和工具,满足特定项目的需求。
三、Canoe的安装以下是安装Canoe的步骤: 1. 下载Canoe安装包。
2. 打开安装包并运行安装程序。
3. 按照安装向导的指示进行安装。
4. 安装完成后,启动Canoe。
四、Canoe的基本功能Canoe提供了许多基本功能,如代码编辑、编译、调试等。
以下是主要功能的介绍:1. 代码编辑Canoe提供了强大的代码编辑功能,包括语法高亮、自动补全、代码折叠等。
开发者可以在编辑器中方便地编写代码,并且可以根据自己的习惯进行个性化配置。
2. 编译和构建Canoe集成了编译器和构建工具,可以将开发者编写的代码编译成可执行文件或固件。
开发者可以通过设置编译选项和构建规则来定制编译和构建过程。
3. 调试Canoe提供了强大的调试功能,包括断点调试、变量监视、寄存器查看等。
开发者可以在调试过程中实时监控程序的执行状态,并进行相应的调试操作。
4. 仿真和测试Canoe支持仿真和测试功能,开发者可以在模拟环境中运行和测试他们的代码。
CANoe简易教程1

CANoe简易教程1转载自 /posts/canoe-tutoiral-part-1.html简介CANoe是什么如果你和我一样接触了点车辆电子开发的话,你可能会听说过CANoe。
CANoe是德国Vector Informatik出品的开发软件,主要用于主机厂(OEMs),或者ECU供应商进行CAN网络,或者CAN相关ECU的开发、分析、仿真、测试和诊断。
当然,CAN 总线主要应用与汽车。
所以Vector Informatik(简称Vector )可以算是一家车辆电子技术公司。
和 Vector 做类似事情的公司还有 Phoenix Contack、Robert Bosch、Siemens、Magix 等等。
我目前所在的单位选择Vector 的 CANoe 是有理由的,尽管我不知道(汗CANoe能做什么庞大的机器中,很有可能含有许多电子控制器(称为ECU,Electronic Control Unit)。
如果是汽车,他们很有可能使用CAN总线进行通讯。
比如发动机控制器、车身控制器、仪表盘。
CANoe有两个主要功能,1.CANoe提供了一个由计算机控制的仿真CAN网络,以及仿真网络上的仿真CAN总线设备。
并且配合外设CAN收发器,CANoe还能够将这段虚拟网络与真实网络连接起来。
2.CANoe能够分析、记录网络上的消息。
这样就能知道任何设备向任何设备发送的信息。
给出各种图表和报告,例如总线占用率、某个信号值随时间的变化等等。
将这些信息展示给用户,用于对器件或者网络的诊断。
简单来说,仿真和分析。
比如,我们现在要设计一个CAN网络,包含若干ECU。
那么在我们的一份设计书中,就会列出,各个ECU向外发送哪些消息、分别使用什么ID、值代表什么意思、哪些ECU会接收哪条消息,以及这些消息是否是周期信号,等等。
在开发的初期,我们可能没有任何ECU。
那么使用CANoe仿真整个网络(所有设备),这样就能了解你设计的网络会不会有什么问题。
CANoe售后培训材料

©2008. HiRainTechnologies. All rights reserved.CANoe快速入门©2007. HiRain Technologies. All rights reserved.CANoe 概述☐CAN 总线开发工具☐测试☐分析☐仿真☐记录Simulated bussimulated rest-of-busAnalysis©2007. HiRain Technologies. All rights reserved.☐硬件接口卡&“狗”☐CANcardXL ☐CANcaseXL ☐收发器☐CANcab (CANpiggy)☐251, 1041, 1054…☐LINcab (LINpiggy)☐7259CAN 卡©2007. HiRain Technologies. All rights reserved.CANoe 组成☐功能强大、操作简单☐CANoe ☐数据库支持☐CANdb++ Editor ☐可编程☐CAPL ☐虚拟仪表☐Panel Editor & Panel Designer©2007. HiRain Technologies. All rights reserved.CANoe 工程环境©2007. HiRain Technologies. All rights reserved.多总线☐软件☐硬件☐控制面板☐Vector Hardware ❑License->Overview©2007. HiRain Technologies. All rights reserved.设置(1)☐硬件☐CAN 卡类型(编号)☐收发器类型☐应用程序通道☐应用程序☐License 信息©2007. HiRain Technologies. All rights reserved.设置(2)☐CANoe ☐通道设置☐Configuration->Options☐Configuration Settings->Channel Usage©2007. HiRain Technologies. All rights reserved.灵活=复杂HW channels Channel1Channel2 Channel1 Channel2 PiggyBack1 PiggyBack2 CANcardXL #1CANcaseXLCANcardXL #2HardwareCANalyzer1 CANalyzer2... CANoe1 CANoe2 CANoe1 for LIN... App channelsApplication©2007. HiRain Technologies. All rights reserved.从复杂到简单☐CANoe☐波特率设置☐Configuration->Hardware Configuration©2007. HiRain Technologies. All rights reserved.基本术语——报文(消息)与信号报文:engine data (ID 100)ID 100B0B1B2CRC信号发动机温度(第二字节,0-6位)未用(第二字节,第七位)发动机转速(第一,二字节)转换规则发动机转速:rpm=1*Bit value (0xFF 代表错误)发动机温度:ºC =2* Bit value –50 (0x7F 代表错误)©2007. HiRain Technologies. All rights reserved.基本术语——环境变量与系统变量☐环境变量☐节点的I/O 信号☐可用于面板或真实I/O☐系统变量☐节点内部参数☐或需要观测的某个数值☐例如:系统变量1 = 报文1.信号1 -报文2.信号2©2007. HiRain Technologies. All rights reserved.☐CANoe☐CANdb++ Editor ☐CAPL☐Panel Editor & Panel Designer©2007. HiRain Technologies. All rights reserved.☐CANoe☐8大窗口☐Trace Window☐Bus Statistics Window☐Statistics Window☐Data Window☐Graphic Window☐Write Window☐Simulation Setup☐Measurement Setup©2007. HiRain Technologies. All rights reserved.CANoe 窗口介绍(1)☐Trace Window☐报文ID 和报文名称(数据库)☐信号(数据库)☐时间(相对值或绝对值)☐通道☐DLC☐Dir (Tx 或Rx )☐更多内容见☐右键点击窗口空白处->Configuration->Columns©2007. HiRain Technologies. All rights reserved.☐在CANoe中添加数据库☐View->Simulatioin Setup©2007. HiRain Technologies. All rights reserved.符号化显示与十进制/十六进制切换Global switches: Hex/Dec and Numeric/Symbolic toggles©2007. HiRain Technologies. All rights reserved.清空Trace 窗口暂停Trace 窗口时间显示切换报文显示切换©2007. HiRain Technologies. All rights reserved.☐Data Window ☐数据库!☐信号名称☐信号值(Value )☐信号单位☐原始值(Raw Value )☐Bar 图©2007. HiRain Technologies. All rights reserved.☐Data Window ☐添加信号☐右键单击空白处☐Add Signals☐选择需要的信号©2007. HiRain Technologies. All rights reserved.☐Graphics Windows ☐数据库!☐显示信号曲线☐不同的颜色和线形☐右键单击空白处☐选择Configuration ☐放大、缩小、平移…©2007. HiRain Technologies. All rights reserved.☐Graphics Windows ☐添加信号☐右键单击空白处☐Add Signals☐选择需要的信号©2007. HiRain Technologies. All rights reserved.☐Statistics Window ☐显示报文出现频率☐显示错误帧出现频率☐统计报告☐右键单击空白处☐Configuration☐Active☐生成统计报告(Write Window)Message frequencyID©2007. HiRain Technologies. All rights reserved.☐Bus Statistics Window ☐总线负载☐数据帧☐错误帧☐CAN 卡控制器状态©2007. HiRain Technologies. All rights reserved.☐Write Window ☐License 信息☐统计报告☐CAPL 输出窗口☐Printf = Write©2007. HiRain Technologies. All rights reserved.☐Desktop☐Create New Desktop ☐Rename Desktop©2007. HiRain Technologies. All rights reserved.固定窗口©2007. HiRain Technologies. All rights reserved.☐Measurement Setup ☐View->Measurement Setup ☐每个模块对应一个窗口☐增加新模块(窗口)☐插入功能块☐数据记录©2007. HiRain Technologies. All rights reserved.新增模块(窗口)©2007. HiRain Technologies. All rights reserved.☐插入功能块☐CAPL 节点☐发生器模块☐回放模块☐触发模块☐过滤器模块©2007. HiRain Technologies. All rights reserved.☐过滤器模块☐通道过滤(Channel Filter )☐报文过滤(Filter )☐变量过滤(Variables)©2007. HiRain Technologies. All rights reserved.☐数据记录☐默认状态关闭☐多种记录文件类型☐多种记录配置方式©2007. HiRain Technologies. All rights reserved.☐记录文件☐右键点击文件图标->Logging file configuration©2007. HiRain Technologies. All rights reserved.☐记录配置方式☐双击Logging 模块☐全部记录☐单次记录☐触发记录©2007. HiRain Technologies. All rights reserved.蒙太奇(5)☐数据记录的目的是为了离线分析☐Mode->To Offline©2007. HiRain Technologies. All rights reserved.☐Simulation Setup ☐View->Simulation Setup☐发生器☐交互式发生器☐CAPL 节点©2007. HiRain Technologies. All rights reserved.发生器模块©2007. HiRain Technologies. All rights reserved.发生器模块©2007. HiRain Technologies. All rights reserved.发生器模块©2007. HiRain Technologies. All rights reserved.交互式发生器模块©2007. HiRain Technologies. All rights reserved.欢迎进入CAPL 的世界☐CAPL(C ommunication A ccess P rogramming L anguage )☐类C 语言☐仿真☐单个节点和整个网络☐外部环境☐测试☐面向事件的编程语言☐总线事件☐键盘事件☐时间事件©2007. HiRain Technologies. All rights reserved.CAPL Browser标题栏菜单条工具条浏览树窗格编译信息窗格状态条全局变量编辑窗格CAPL 程序编辑窗格©2007. HiRain Technologies. All rights reserved.CAPL 事件事件类型事件名程序执行条件事件过程语法结构*系统事件PreStart CANoe 初始化时执行on preStart { … }Start 测量开始时执行on start { … }StopMeasuremet测量结束时执行on stopMeasurement { … }CAN 控制器事件BusOff硬件检测到BusOff 时执行on busOff { … }ErrorActive 硬件检测到ErrorActive 时执行on errorActive { … }ErrorPassive 硬件检测到ErrorPassive 时执行on errorPassive { … }WarningLimit硬件检测到WarningLimit 时执行on warningLimit { … }CAN 消息事件自定义接收到指定的消息时执行on message Message { … }时间事件自定义定时时间朝过时执行on timer Timer { … }键盘事件自定义键值指定的键被下时执行on key Key { … }错误帧事件ErrorFrame硬件每次检测到错误帧时执行on errorFrame { … }环境变量事件自定义指定的环境变量值改变时执行on envV ar EnvV ar { … }©2007. HiRain Technologies. All rights reserved.CAPL 基本语法☐类C 语言,语法与C 语言基本相同☐注释☐//放置在需要注释的语句之前,注释单行☐/*注释起始符,其后的内容被注释☐*/注释结束符,结束由‘/*’开始的注释☐分号程序结束标识☐大括号函数体counter = counter+1;if (counter ==256){counter=0;stop();}©2007. HiRain Technologies. All rights reserved.消息事件☐on message 123 //对消息123(dec)反应☐on message 0x123 //对消息123(hex)反应☐on message MotorData //对消息MotorData(符号名字)反应☐on message CAN1.123 //对CAN 通道1收到消息123反应☐on message * //对所有消息反应☐on message 100-200 //对100-200间消息反应©2007. HiRain Technologies. All rights reserved.☐on key ‘a’//按‘a’键反应☐on key ‘ ’ //按空格键反应☐on key 0x20 //按空格键反应☐on key F1 //按F1键反应☐on key Ctrl-F12 //按Ctrl + F12键反应☐on key PageUP //按PageUp 键反应☐on key Home //按Home 键反应☐on key *//按所有键反应©2007. HiRain Technologies. All rights reserved.☐定时器声明☐msTimer myTimer; //将myTimer 申明ms 为单位的变量☐timer myTimer;//将myTimer 申明s 为单位的变量☐定时器函数☐setTimer(myTimer,20);//将定时值设定为20ms ,并启动☐cancelTimer(myTimer);//停止定时器myTimer☐定时器事件☐on timer myTimer//对myTimer 设定的时间到反应。
canoe怎么安装

Canoe如何安装Canoe是一款用于模拟和调试控制器局域网络(Controller Area Network,CAN)的工具。
它可以帮助开发者在CAN网络中发送和接收消息,以测试和调试CAN总线通信。
本文将介绍如何安装Canoe软件。
步骤一:下载Canoe软件首先,我们需要从Vector官方网站下载Canoe软件。
请注意,Canoe软件是商业软件,需要购买许可证才能使用。
您可以从Vector官方网站购买许可证并下载最新版本的Canoe软件。
步骤二:安装Canoe软件安装Canoe软件非常简单。
只需按照以下步骤进行操作:1.打开下载的Canoe安装程序。
2.点击“下一步”按钮开始安装过程。
3.阅读许可协议,并接受条款。
4.选择安装路径,您可以使用默认路径,也可以选择其他路径。
5.点击“下一步”按钮继续安装。
6.您可以选择是否创建桌面快捷方式。
7.点击“安装”按钮开始安装过程。
8.等待安装完成。
9.点击“完成”按钮退出安装程序。
步骤三:启动Canoe软件安装完成后,您可以通过以下步骤启动Canoe软件:1.在桌面上找到Canoe快捷方式。
2.双击快捷方式启动Canoe软件。
3.如果没有创建桌面快捷方式,您可以在安装路径中找到Canoe的可执行文件(通常是“Canoe.exe”),双击运行。
4.程序启动后,您将看到Canoe的主界面。
步骤四:使用Canoe软件Canoe软件提供了丰富的功能,以模拟和调试CAN网络。
以下是一些常用功能的介绍:1.创建新的CAN数据库:您可以通过定义CAN信息和它们的信号来创建自定义的CAN数据库。
2.设置CAN通道参数:您可以设置CAN通道的波特率、采样点数等参数。
3.发送CAN消息:您可以手动发送CAN消息,也可以设置定时发送CAN消息以模拟实际情况。
4.监控CAN消息:您可以监视CAN总线上的消息,包括发送和接收的消息。
5.分析CAN消息:Canoe软件提供了强大的分析工具,可以对CAN消息进行解析和分析,以便定位问题和优化系统性能。
canoe操作流程
canoe操作流程Canoe是一种古老而又有趣的水上运动工具,它可以让人们在湖泊、河流和海洋上畅游。
使用Canoe不仅可以锻炼身体,还可以让人们享受大自然的美景。
下面我将为大家介绍一下Canoe的操作流程。
首先,准备工作是非常重要的。
在使用Canoe之前,需要确保Canoe的座位和桨是安全的。
检查Canoe的座位是否稳固,桨是否完好无损。
同时,还需要穿着合适的衣物和鞋子,以免在划船过程中受伤。
接下来,是上船的步骤。
首先,将Canoe放在水中,确保它稳定。
然后,小心地爬上Canoe,坐在座位上。
在上船的过程中,要确保重心稳定,以免翻船。
一旦上了Canoe,就可以开始划船了。
划船的技巧是非常重要的。
首先,要握住桨的一端,将另一端放在水中。
然后,用力将桨向后划,然后向前划。
划船的动作要轻柔而有力,以保持Canoe的平衡。
在划船的过程中,要时刻注意周围的环境。
避免碰撞到其他船只或障碍物。
同时,要注意风向和水流的变化,以便及时调整船的方向。
划船不仅可以锻炼身体,还可以让人们享受大自然的美景。
在湖泊、河流和海洋上划船,可以欣赏到不同的风景,感受大自然的宁静和美丽。
最后,划船结束后,要小心地下船。
首先,将Canoe靠岸,确保它稳定。
然后,小心地爬下Canoe,以免摔倒。
最后,将Canoe 拖到岸边,清洗干净并存放好。
总的来说,Canoe是一种非常有趣的水上运动工具,使用它可以让人们享受大自然的美景,锻炼身体。
但是在操作Canoe时,要注意安全,掌握好划船的技巧,以免发生意外。
希望以上介绍对大家有所帮助,让大家能够更好地享受Canoe带来的乐趣。
CANoe管用实践实例
CANoe简单入门实例利用一个简单的例子,叙述CANoe的基本使用方法。
1、新建一个工程|||打开CANoe-File-new configuration-选择CAN_500kBuadTemplate.tcn。
保存的时候新建一个文件夹canno_self_demo,在其中新建一个demo_from_world。
取名main,保存。
2、为这个工程新建一个database|||在上面新建的main.cfg界面上,File-Open CANdb Editor,在Vector Candb++Editor中新建一个database:File-creat database-CANTemplate,取名db保存在emo_from_world中新建的db++文件夹中。
接着新建三个Signals:NEW两个Messages:由于Signals需要放到Messages中才能够传输,所以:而,Singles在Message中需要有很多位置可以负载,我们需要确定一下位置,我们可以在Message中设置Signals的位置(可以拖动)如下:Message从哪里发出来?所以需要在Network nodes中来new两个ECU,如下:并且,把这个ECU操作的Messages带进来:ECU2同样的操作:Ok,db大部分的工作做完了。
解释一下:Signals中间有三个信号,分别是引擎的速度,引擎的温度,以及齿轮值。
Messages中两个消息,一个负载这引擎的信号,一个负载齿轮的信号。
这两个分别由两个ECU来发出,ECU1、ECU2。
那么,这里能够显著变化的就是速度温度齿轮值的变化,所以我们新建一个控制面板来对着三个信号进行控制,那么,我们就需要新建三个环境变量来与之对应。
????怎么解释:::::疑惑1。
在Environment variables right click-new:三个变量都一样。
此时,database我们操作完成。
CANape标定入门
CANape-标定、测量和诊断工具 快速入门© 2007. HiRain Technologies. All rights reserved. V1.0 2007-10-10标定的基本概念• 基本概念 ECU基本结构 什么是标定 一般标定流程 ASAM接口简介 CCP协议简介 CANape工具简介© 2007. HiRain Technologies. All rights reserved. Slide:ECU基本结构• ECU结构和接口External Flash/ROMOn-chip CAN Flash Debug Interface μCOn-chip On chip RAMCCP NEXUS, AUD, ...Serial calibration• Limited data throughput • Calibration RAM necessary • Additional software (services) to be integrated in the ECU code dEthernet USB, FlexRay Diagnostic InterfaceXCP• Development with production KWP2000 ECUs in production intent locations CAN/K-Line CAN/K Line© 2007. HiRain Technologies. All rights reserved. Slide:ECU工作过程例子:EMS ECUH-Bridge H Bridge 节流阀油门踏板 节气门开度 曲轴传感器 凸轮传感器 空气温度 空气质量 爆震传感器 CAN, Diagnostic ASICs风扇 4 Lambda p probes© 2007. HiRain Technologies. All rights reserved. Slide:μControllerFlash RAM RAMEPROM• 参数或查表在read-only-memory read only memory (ROM or Flash) Injection coils 1 - 8 InjectiondriverIgnition driverSpark plugs 1 - 8RAM RAML side id • Low 变量拷贝到 RAM 作为标定变量• High 标定后的参数复制到 ROM 或flash side ROM / Flash ROM/FLASHE B E-Box fan f VANOS 1 + 2Relais什么是标定?• 标定:根据ECU的性能要求或者整车的性能要求,修改调整或者优化ECU内 部参数的过程。
CANoe售后培训材料
CANoe售后培训材料2008. HiRainTechnologies. All rights reserved.CANoe快速入门2007. HiRain Technologies. All rights reserved.CANoe 概述CAN 总线开发工具测试分析?仿真?记录Simulated bussimulated rest-of-busAnalysis2007. HiRain Technologies. All rights reserved.?硬件接口卡&“狗”CANcardXL ?CANcaseXL收发器CANcab (CANpiggy)251, 1041, 1054…LINcab (LINpiggy)7259CAN 卡2007. HiRain Technologies. All rights reserved.CANoe 组成功能强大、操作简单CANoe数据库支持CANdb++ Editor可编程CAPL虚拟仪表Panel Editor & Panel Designer2007. HiRain Technologies. All rights reserved.CANoe 工程环境2007. HiRain Technologies. All rights reserved.多总线软件?硬件控制面板Vector HardwareLicense->Overview2007. HiRain Technologies. All rights reserved.?硬件CAN 卡类型(编号)?收发器类型应用程序通道应用程序?License 信息2007. HiRain Technologies. All rights reserved.?CANoe通道设置Configuration->OptionsConfiguration Settings->Channel Usage2007. HiRain Technologies. All rights reserved.灵活=复杂HW channels Channel1Channel2 Channel1 Channel2 PiggyBack1 PiggyBack2 CANcardXL #1CANcaseXLCANcardXL #2HardwareCANalyzer1 CANalyzer2... CANoe1 CANoe2 CANoe1 for LIN... App channelsApplication2007. HiRain Technologies. All rights reserved.从复杂到简单CANoe波特率设置Configuration->Hardware Configuration2007. HiRain Technologies. All rights reserved.基本术语——报文(消息)与信号报文:engine data (ID 100)ID 100B0B1B2CRC 信号发动机温度(第二字节,0-6位)未用(第二字节,第七位)发动机转速(第一,二字节)转换规则发动机转速:rpm=1*Bit value (0xFF 代表错误)发动机温度:oC =2* Bit value –50 (0x7F 代表错误)2007. HiRain Technologies. All rights reserved.基本术语——环境变量与系统变量环境变量节点的I/O 信号?可用于面板或真实I/O系统变量节点内部参数?或需要观测的某个数值例如:系统变量1 = 报文1.信号1 -报文2.信号22007. HiRain Technologies. All rights reserved.?CANoe ?CANdb++ Editor ?CAPLPanel Editor & Panel Designer2007. HiRain Technologies. All rights reserved.?CANoe8大窗口Trace Window ?Bus Statistics WindowStatistics Window ?Data Window ?Graphic Window ?Write Window ?Simulation Setup ?Measurement Setup2007. HiRain Technologies. All rights reserved.CANoe 窗口介绍(1)Trace Window报文ID 和报文名称(数据库)?信号(数据库)?时间(相对值或绝对值)?通道?DLCDir (Tx 或Rx )?更多内容见右键点击窗口空白处->Configuration->Columns2007. HiRain Technologies. All rights reserved.在CANoe中添加数据库View->Simulatioin Setup。