基于软件声纳概念的波束稳定
波束赋形作用

波束赋形作用波束赋形作用是指通过干涉和相位调控技术,将传输波束聚焦到特定区域,实现波束的形状控制的一种技术。
这种技术在通信、雷达、成像、医学和材料加工等领域有着广泛的应用。
一、波束赋形的原理和方法波束赋形的关键在于控制波束的相位和幅度。
通过改变传输波的相位分布,可以实现波束的聚焦、波束的偏转和波束的形状变化。
常用的波束赋形方法有以下几种:1. 相控阵技术:相控阵技术是指通过调节阵列天线上的每个阵元的相位和幅度,实现波束的控制。
相控阵技术广泛应用于雷达、通信和成像等领域。
2. 基于液晶光学的波束赋形:利用液晶光学元件的电光效应和光学调制特性,可以实现光波的相位调控。
通过改变液晶元件的电场分布,可以实现光波的干涉和衍射,从而实现波束赋形。
3. 基于声波的波束赋形:通过改变声波的相位和幅度,可以实现声波的聚焦和偏转。
这种方法常用于医学超声成像和声纳领域。
二、波束赋形的应用1. 通信领域:波束赋形技术可以提高通信系统的传输效率和容量。
通过将发射波束聚焦到接收器上,可以减少信号的传播损耗和干扰,提高信号的接收质量。
2. 雷达领域:波束赋形技术可以实现雷达波束的聚焦和偏转,提高雷达的探测和目标跟踪能力。
同时,波束赋形技术还可以减少雷达系统的功耗和成本。
3. 成像领域:波束赋形技术可以实现成像系统的分辨率和对比度的提高。
通过调整传输波的相位和幅度分布,可以实现对目标的高分辨率成像。
4. 医学领域:波束赋形技术在医学超声成像中有着广泛的应用。
通过调节超声波的相位和幅度,可以实现对人体组织的聚焦和成像,提高诊断的准确性。
5. 材料加工领域:波束赋形技术可以实现激光的聚焦和形状控制,用于材料的切割、焊接和打孔等加工过程。
这种技术可以提高加工的精度和效率。
三、波束赋形技术的发展趋势随着微纳制造技术和光学材料的不断发展,波束赋形技术将会得到进一步的发展和应用。
未来的波束赋形技术可能会更加精确和高效,可以实现更复杂的波束形状控制和更高的分辨率。
MB-System软件在多波束数据处理中的作用

·3·NO.8 2018( Cumulativety NO.20 )中国高新科技China High-tech 2018年第8期(总第20期)MB-System是由美国Lamont-Doherty地质观测所开发的一套功能强大、覆盖数据格式广泛的,集数据采集、数据解析、数据处理、3D水底成图于一体的多波束数据处理软件。
它是一套运行于Linux 系统下的针对多波束测深和声纳数据处理的软件工具。
而Linux系统在个人电脑上应用得的很少,限制了该软件的广泛应用。
但MB-System软件给出了多种多波束数据格式的核心代码,这就为利用该软件来开发自己的多波束数据处理软件创造了一定 条件。
众所周知,任何仪器设备都不可缺少核心技术的支撑。
掌握了核心技术,就掌握了产品的生命,掌握了未来。
我国在许多高新科技领域都处于低端,原因就是那些掌握核心科技的国家不会轻易将这种技术传授给别国,而我国在核心技术的创新方面近年来又不尽如人意,导致我国在全球产业链中居于低端地位,在国际贸易中常常受制于人。
随着陆地资源的日渐枯竭,海洋资源的开发和利用日益受到各国的重视,由此也催生了与海洋资源开发相关的新产业。
海洋测绘是开发海洋资源必不可少的前提条件,并且这项事业只是在近几十年才进入快速发展海洋测绘技术通道,我国也在逐年重视海洋的开发,这就为我国赶超国际先进水平提供了发展契机。
海洋测绘的核心技术包括多波束数据处理技术,而我国多波束数据处理水平较国际先进水平有一定的差距。
我国多波束测深和声纳设备大多数是由西方技术先进国家所生产,这些设备采集的数据格式没有完全公开,虽然随机的软件都会有数据的采集和处理功能,但这些过程都是封闭的,这不利于我们进行自己的数据分析和处理,也不利于进行国产多波束数据处理软件的开发和升级。
MB-System软件代码中包含多种多波束数据核心代码的信息,通过对该软件的研究,能相对容易地获得一些多波束数据完整的数据结构,便于开展对多波束数据的精细化处理工作。
多波束声纳及声学原理2
d1
d2
S1
d
S2
Sound sources
Line of equidistant locations
普通波动原理
相长干涉位置 2
A θ S1 d θ S2 θ
A = d x sin(θ) 相长干涉 : A/λ = 0, 1, 2, 3...... or (d/λ) x sin(θ) = 0, 1, 2, 3, 4, ....etc 相消干涉 : (d/λ) x sin(θ) = 0.5, 1.5, 2.5, 3.5, ....etc
-13 dB 第一旁瓣
N
a w o r
b e
c m a
h r a
r e t c
c i t s
h t i w
s e d i
b o l
s e
-27 dB 第一旁瓣
-90
+90
A -90
+90
A
普通波动原理- 波束宽度
•换能器阵越大或基元越多主波束越窄 •换能器阵尺寸一定时,频率越高,主瓣越窄。但频率越高, 衰减越大
多波束声纳和声学原理
普通声学原理
水中的声速
海洋中各处的声速都可能不一样 取决于三个参数 盐度变 1ppt = 声速约变 1.3 m/s 温度变 1ºC = 声速约变 3 m/s 压力 :165米深度变化的影响相当于 温度变1ºC
表面声速
Sound velocity (at surface)
1560 1540 Velocity (m/sec) 1520 1500 1480 1460 1440 1420 1400 0 5 10 15 20 25 30 35 Temperature (degrees C) 0 ppt 5 ppt 10 ppt 15 ppt 20 ppt 25 ppt 30 ppt 35 ppt
波束形成算法及其新进展ppt课件

“雪亮工程"是以区(县)、乡(镇) 、村( 社区) 三级综 治中心 为指挥 平台、 以综治 信息化 为支撑 、以网 格化管 理为基 础、以 公共安 全视频 监控联 网应用 为重点 的“群 众性治 安防控 工程” 。
引言
波束形成是阵列信号处理、智能天线系统中一重要技术 使用阵列天线的优点:
-提高系统的容量 -提高系统的性能 -抑制干扰和噪声 -节省功率
2.2 Bartlett 波束形成算法
Bartlett 波束形成算法是使得波束形成的输出功率相对 于某个输入信号最大。
ar m g [E a { w H x x (n )xH (n )w }] w
wba
a() aH()a()
“雪亮工程"是以区(县)、乡(镇) 、村( 社区) 三级综 治中心 为指挥 平台、 以综治 信息化 为支撑 、以网 格化管 理为基 础、以 公共安 全视频 监控联 网应用 为重点 的“群 众性治 安防控 工程” 。
d 个独立信源,则 Rank [ R S ] d ,则有
E E S
EN
,
S
0
0
N
S diag 1 2 d
N diag d 1 d 2 m
E S e1 e2 ed
E N e d 1 e d 2 e m
1 2 d d 1 d 2 m
“雪亮工程"是以区(县)、乡(镇) 、村( 社区) 三级综 治中心 为指挥 平台、 以综治 信息化 为支撑 、以网 格化管 理为基 础、以 公共安 全视频 监控联 网应用 为重点 的“群 众性治 安防控 工程” 。
目录
§0.引言 §1.阵列天线的统计模型和DOA估计 §2.常用的波束形成算法 §3.自适应波束形成算法及其改进 §4.采样协方差求逆SMI算法改进 §5.其他波束形成算法 §6.总结
浅析侧扫声呐技术在海洋测绘中的应用
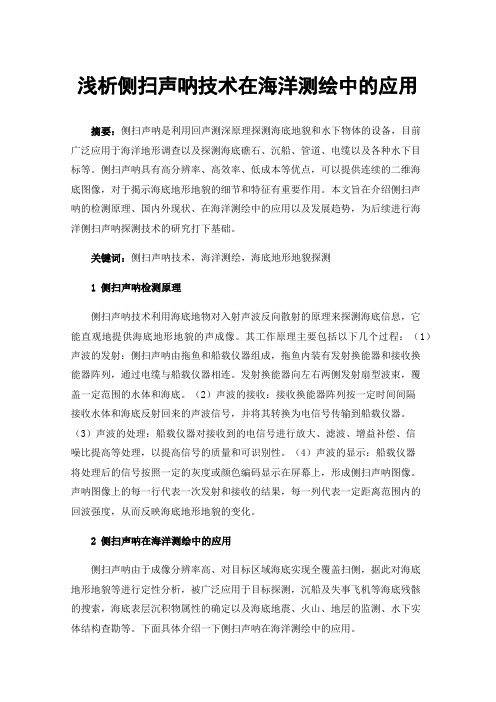
浅析侧扫声呐技术在海洋测绘中的应用摘要:侧扫声呐是利用回声测深原理探测海底地貌和水下物体的设备,目前广泛应用于海洋地形调查以及探测海底礁石、沉船、管道、电缆以及各种水下目标等。
侧扫声呐具有高分辨率、高效率、低成本等优点,可以提供连续的二维海底图像,对于揭示海底地形地貌的细节和特征有重要作用。
本文旨在介绍侧扫声呐的检测原理、国内外现状、在海洋测绘中的应用以及发展趋势,为后续进行海洋侧扫声呐探测技术的研究打下基础。
关键词:侧扫声呐技术,海洋测绘,海底地形地貌探测1侧扫声呐检测原理侧扫声呐技术利用海底地物对入射声波反向散射的原理来探测海底信息,它能直观地提供海底地形地貌的声成像。
其工作原理主要包括以下几个过程:(1)声波的发射:侧扫声呐由拖鱼和船载仪器组成,拖鱼内装有发射换能器和接收换能器阵列,通过电缆与船载仪器相连。
发射换能器向左右两侧发射扇型波束,覆盖一定范围的水体和海底。
(2)声波的接收:接收换能器阵列按一定时间间隔接收水体和海底反射回来的声波信号,并将其转换为电信号传输到船载仪器。
(3)声波的处理:船载仪器对接收到的电信号进行放大、滤波、增益补偿、信噪比提高等处理,以提高信号的质量和可识别性。
(4)声波的显示:船载仪器将处理后的信号按照一定的灰度或颜色编码显示在屏幕上,形成侧扫声呐图像。
声呐图像上的每一行代表一次发射和接收的结果,每一列代表一定距离范围内的回波强度,从而反映海底地形地貌的变化。
2侧扫声呐在海洋测绘中的应用侧扫声呐由于成像分辨率高、对目标区域海底实现全覆盖扫侧,据此对海底地形地貌等进行定性分析,被广泛应用于目标探测,沉船及失事飞机等海底残骸的搜索,海底表层沉积物属性的确定以及海底地震、火山、地层的监测、水下实体结构查勘等。
下面具体介绍一下侧扫声呐在海洋测绘中的应用。
2.1海底地形地貌测量侧扫声呐可以提供连续的二维海底图像,对于揭示海底地形地貌的细节和特征有重要作用。
通过对声呐图像的解译和分析,可以识别出海底的不同类型和形态,如沙纹、基岩、岩石、锚沟等。
前视声纳波束形成算法的FPGA实现

文献标识码: A
中 图分类号:T P 3 9
前视 声纳波束形成算法Leabharlann F P G A 实现 赵
摘
慎 ,乔纯捷 ,张朝 明 ,马 超
( 1 .国 防科 学技 术大 学机 电工程 与 自动化 学院 ,长沙 4 1 0 0 7 3 ;2 . 中 国船 舶重 工集 团公司 第 7 0 5 研究 所 ,昆明 6 5 0 1 1 8 )
i nf o r ma t i o n, ba s e d o n FP GA . Th e s i g na l mo d e l i s e s t a b l i s h e d ,a nd t h e c o r e a l g o r i t h m i s d e r i v e d. Th e di ic f ul t n e s s i n t he i mp l e me n t a t i o n i s p r e s e n t e d, a nd t h e u t i l i z a t i o n of FP GA r e s o u r c e s i s p r o vi d e d. A v a l i d a t i o n o f t h e pr o c e s s i n g s c h e me s i s c o nd u c t e d wi t h r e a l d a t a i n t h e t a nk
静 态实 验 ,验 证该 算法 具有 实时运 算 的正确 性 。
关健词 :前 视声 纳 ;多通道 高采 频 ;正交解 调 ;波束形 成 ;现场可 编程 门阵列 ;并行 运算
FPGA I m pl e me nt a t i o n 0 f Fo r wa r d Lo o ki n g So na r Be a mf o r mi ng Al g o r i t hm
利用声呐技术的涉水桥梁安全检测应用

2021.01科学技术创新利用声呐技术的涉水桥梁安全检测应用纪立军(中船七二六所上海瑞洋船舶科技有限公司,上海201108)1概述涉水桥梁质量事关桥梁交通安全,安全检测十分重要。
对于涉水桥梁,由于水域环境的复杂性和水下病害的隐蔽性,需要关注的安全问题与桥梁水上部分有很大不同。
涉水桥梁的安全质量问题主要包括桥墩受水流冲刷问题、桥墩水下裂缝、麻面、淤积等。
为了监测和预警此类问题,需要采用不同的技术手段对涉水桥梁问题进行检测。
综合来看,目前潜水探摸的方法有一定的缺陷,因此在消除桥梁工程中水下基础的质量隐患方面带来许多困难和不便,难以满足高水平水下探测任务需求。
而扫描声呐和多波束声呐可以同时发送和接收多个波束,与单波束回声测深仪相比,它能把测深技术从点、线扩展到面,并进一步发展到立体测深和自动成图,特别适合进行涉水桥梁的快速安全检测。
为此,本文以扫描声呐(MS1000)和多波束声呐(EM 2040)为例,主要阐述两款声呐系统的原理,并通过工程实例应用说明其推广价值和适用性,是涉水桥梁安全检测的重要方法。
2两款声呐的工作原理介绍2.1MS1000扫描声呐工作原理MS1000扫描声呐是一种主动声呐,其系统主要由换能器、甲板声呐图像处理器、采集工作站和水下电缆等部分组成。
工作时声呐换能器可以旋转360°,获得较清晰的水下声呐影像,多个影像可以镶嵌拼合,形成较大范围影响。
该设备采用连续发射调频波测距法来测距,当发射信号遇到检测对象立面时,产生回波;利用发射频率、回波频率、声速、调频周期等,即可确定检测对象立面各点与声呐的距离,从而生成检测对象立面声呐扫描图像。
2.2EM2040多波束工作原理EM2040由4部分组成:甲板处理单元、发射换能器、接收换能器和工作站。
还可配备姿态传感器、定位系统、声速剖面仪。
当配置一个接收换能器时,声呐扫宽可达水深的5.5倍,并能与现场采集的导航定位及姿态数据相结合,绘制出高精度、高分辨率的数字成果图。
多波束和三维声呐技术在码头工程中的应用实例
多波束和三维声呐技术在码头工程中的应用实例码头工程是指建设和维护港口和码头设施的工程,主要包括码头、堤坝、引导船舶进出港口的水道等。
在码头工程中,准确地获取水下地形和障碍物的信息对于港口的规划、设计和维护都非常重要。
多波束和三维声呐技术就是一种应用于码头工程中的水下测量技术,可以提供高精度的水下地形图和物体探测信息。
多波束技术是一种将船舶底部或潜水器上的多个声源和接收器组合使用的水下测量技术。
它可以同时获取多个方向的声纳数据,并通过数据处理得到高分辨率的水下地形图和物体探测信息。
在码头工程中,多波束技术可以应用于以下几个方面:1. 港口建设前的勘测:在港口建设前,需要对港口区域进行水下地形的详细勘测。
多波束技术可以提供高精度的水下地形数据,帮助规划和设计人员了解港口区域的地貌特征和水深变化情况。
2. 港口维护和疏浚:港口在使用一段时间后会因为泥沙淤积和地形变化而需要进行疏浚维护。
多波束技术可以提供详细的地形图和水深数据,帮助维护人员了解港口各个部位的泥沙淤积情况,并进行有针对性的疏浚工作。
3. 港口的航道标志和引导设施:为了安全引导船只进出港口,港口需要设置航道标志和引导设施。
多波束技术可以帮助港口规划师和设计师确定最佳的航道位置和引导设施的布置,以确保船只的安全通航。
三维声呐技术是一种可以获取水下物体三维位置信息的水下测量技术。
通过将多个声呐器件放置在不同位置并同时工作,可以实现对水下物体的高精度定位和建模。
1. 港口堤坝的监测:港口的堤坝是保护港口的重要设施,需要定期对其进行监测,以确保其安全性。
三维声呐技术可以提供堤坝的三维模型和变形监测信息,帮助工程师了解堤坝结构的变化情况,并做出相应的维护和修复措施。
2. 水下障碍物的探测:在港口建设和维护过程中,水下障碍物的探测是非常重要的。
三维声呐技术可以提供水下障碍物的三维位置和形状信息,帮助工程师制定合理的工程方案,防止因为障碍物的存在而导致不必要的风险和损失。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第32卷第1期 2013年02月 声学技术
Technical Acoustics Vo1.32.NO.1 Feb.,2013
基于软件声纳概念的波束稳定 毕彦 ,许伟杰 ,向大威 (1.海军驻上海地区水声导航系统军事代表室,上海201108;2.中国科学院声学研究所东海研究站,上海200032) 摘要:声纳载体航向和姿态的变化,会使声纳出现很异常的局外数据,从而使诸如多普勒计程仪、多普勒分层流速 测量仪、三维前视声纳、地形匹配导航声纳、单/多波束测深仪以及多波束鱼探仪等声纳的性能下降。如果三维声纳 采用软件声纳的结构,就可以方便地实现动态波束稳定,从而使声纳的测量精度得到提高。对软件声纳、波束稳定 的原理与实现途径作了分析。分析表明:若能实时地得到声纳载体的航向角、纵倾角和横摇角,并且能动态地改变 波束的方向,就可以随时随刻地稳定声纳的波束。 关键词:三维声纳;软件声纳;波束稳定 中图分类号:TN911 文献标识码:A 文章编号:1000—3630(2013)一01—0064—04 DOI编码:10.3969 ̄.issn1000—3630.2013.01.015
Beam stabilization based On the conception Of software defined sonar
BI Yan ,XU Wei-jie‘,XIANG Da一、ver (1.NavalUnderwaterAcousticandNavigationSystemAgencyinShanghaiRegion,Shanghai201108,China; 2.ShanghaiAcousticLaboratory,InstituteofAcoustics,ChineseAcademyofSciences,Shanghai200032,China)
Abstract:The variations of carrier heading and carrier attitude will arise the serious outlier in sonar data and SO cause the performance degradation of some sonar units,such as Doppler Velocity Log;Acoustic Doppler Current Profiler; Forward—looking Sonar;Terrain Reference Navigation Sonar;Single/Multi-beam Echo・-sounder and Multi-beam Fishing Sonar.For Software Defined Sonar,it is quite easy tO dynamically stabilize the beams of 3D Sonar,SO the measuring accuracy of the sonar could be improved.A brief introduction to the Software Defined Sonar and the basic principle and implementation of Beam Stabilization are presented in the paper.If the heading;pitching and rolling could be obtained in real—time and the beam direction could be changed dynamicaUy,the sonar beam is stabilized all the time. Key words:3D sonar;Software Defmed Sonar(SDS);beam stabilization
0 引言 某些声纳,诸如多普勒计程仪、多普勒分层流 速测量仪、三维前视声纳、地形匹配导航声纳、单 /多波束测深仪以及多波束鱼探仪等,当声纳载体的 航姿发生改变时,就会使参数估计的精度下降,甚 至会因丢失或部分丢失回波而出现局外数据或断 点。 以多普勒计程仪为例,常规的多普勒计程仪采 用Janus算法。这种算法将声轴方向上的速度转换 成载体的纵向与横向速度。Janus算法十分简单, 但由于作了载体是水平的假设,因此对抗纵倾和横 摇的能力十分有限。当纵倾角(或横摇角)不超过8。
收稿日期:2012-10-ll;修回日期:2013—01-30 作者简介:毕彦(1976一),男,山东烟台人,工程师,研究方向为水声导 航。 通讯作者:毕彦,E—mail:by58713780@sohu.corn
时,2个速度分量的测量误差才能维持在1%以下。 如果能够得到实时的载体航姿,则利用最小 乘估 计和矩阵算法,可使多普勒计程仪的测量精度有比 较大的提高 。但是当发射与接收之间的时延很大 时,接收瞬间的载体航姿与发射瞬间的载体航姿就 有可能相差很大,从而会降低矩阵算法的有效性, 也会因丢失或部分丢失回波使速度数据中出现局 外数据或断点。 如果采用波束稳定技术,就能使上述问题得到 很好的解决。所谓波束稳定技术,就是:不论声纳 载体的航姿如何变化f例如,航向、纵倾以及横摇等 同时发生变化1,声纳波束总是能准确地对准目标。
1三维声纳与软件声纳 常规的三维声纳要实现波束稳定,例如同时对 抗载体的航向角、纵倾角以及横摇角的变化,会使 问题变得比较复杂。因为三维声纳基阵中有数百个 第1期 毕彦等:基于软件声纳概念的波束稳定 65 甚至近千个独立阵元,同时还可能要求形成数百个 波束,如果要同时对抗载体的航向、纵倾以及横摇 的变化,则声纳应该具有相应个数的发射/接收通 道,而且所有的通道应该具有很高的一致性。大量 的阵元电缆进舱以及大量的发射/接收通道与发射/ 接收多波束形成器互联也不是一个很简单的问题。 随着软件无线 列的出现,国内对软件声纳 的讨 论也渐渐多了起来。如果我们利用软件声纳的一些 特点来改变常规三维声纳的结构,就能使上述那些 复杂问题得以简化。 在软件声纳中,发射机已简化为宽带功率放大 器,接收机也简化为宽带接收信号调理器f它由差分 输入的低噪声前置放大器、程控增益放大器、反折 叠滤波器和差分输出放大器所组成)。正因为这两种 部件十分简单,所以声纳就可以拥有数百个独立的 发射/接收通道,又由于这些通道都是宽带运行的, 因此,很容易地在声纳比较窄的工作频段内保持高 度一致性。当声纳载体中有多部声纳同时工作时, 为了满足声兼容性,宽带接收信号调理器必需有足 够宽的动态范围,另外,在接收波束形成器中必需 具备数字滤波的功能。 在软件声纳中,发射/接收多波束形成器也演变 为“声纳刀片”。“声纳刀片”这个别名是取自于 IBM的“刀片服务器”。“声纳刀片”由多个24bits 高采样率的Sigma-DeltaAD、多个高数模转换率的 DA、高性能的FPGA以及高性能的CPU所组成。 由于宽带功率放大器、宽带接收信号调理器和 “声纳刀片”的体积小、功耗低以及可靠性高,’因 此可以将它们集成到声纳的基阵中去。从而使得 “穿舱密封管节”的数量大大降低。如果采用光缆 传输数据,则还能同时提高对抗电磁干扰的能力。 “声纳刀片”不但可以宽带工作,而且通过改 变软件,就可以实现声纳功能和声纳性能的升级。 若采用软件声纳的概念,利用一个基阵,还可以实 现多种不同声纳的功能。例如,实现波束稳定的多 普勒计程、多普勒分层流速测量、海底地貌测量以 及单/多波束测深。 软件声纳还可以缩短项目的开发周期、开发经 费和降低声纳的造价。特别是采用Mills交叉阵的 软件声纳,几乎不采用如变压器或铁心电感等自制 件,从而简化了制造工艺。此外,不同型号的声纳, 可以公用很多的部件,从而可以降低基地的备件数 量,使得人员培训以及设备维修变得非常简单。 软件声纳的关键技术有:波束稳定技术、复矢 量分解技术、波束形成方法与技术、栅瓣抑制技术、 频分多波束技术以及宽带恒定波束技术等。本文将 对软件声纳的关键技术之一,软件声纳的波束稳定 技术进行介绍。并将对稳定波束在软件声纳中的实 现途径,作一简单的分析。
2坐标系与坐标系绕轴旋转 为了便于波束稳定技术的分析,首先建立一个 导航坐标系,即坐标系N。坐标系N的原点o 位于 载体的等效中心O,其三个轴X 、Y 和z 分别指向 北、东和垂直向下,如图1所示。图中T是目标。
图1导航坐标系 Fig.1 Navigation coordinates
再建立一个载体坐标系,称作坐标系B。坐标 系B的原点为Ob=o。Xb轴与yb轴所构成的平面与 载体的底平面平行。OX 指向载体的正前方,oYb指 向载体的右横方向,OZ 的方向根据右手法则确定。 3D声纳基阵的等效中心o =o。基阵的0。方向 与x 轴的方向完全一致。基阵的垂直轴与z 轴完 全一致。 为了推导方便再建立一个辅助坐标系,即坐标 系P。坐标系P的原点也位于o。坐标系的x 轴是 这样规定的,即ox 指向目标T。 若有一个直角坐标系xyz,首先绕z轴旋转一 个角 ,则相应的方向余弦矩阵 为: r cos sin o1 =I—sin COS 0(1) l 0 0 1 l
继而,绕首次旋转后的y轴旋转一个 角,则 相应的方向余弦矩阵 为: o_s =1 0 1 0 l (2) 【-sin 0 cos j
最后,绕第二次旋转后的x轴旋转一个 角, 声 学 技 术 2013笠 则相应的方向余弦矩阵 为: 『 o o ] 西=l 0 COS sin I (3) Lo—sin COS州
3次旋转后的新坐标系为x'y'z 。 、 和 称 作欧拉角,欧拉角与3次旋转所对应的转换矩阵A 的关系如式(4)所示: = (4) 若矢量在老坐标系中表示为 ,矢量在新坐标
系中表示为rD,而转换矩阵用 D表示,则有: p,a (5) rⅡ= -D1rD (6) 由于方向余弦矩阵的逆矩阵等于方向余弦矩 阵的转置,因此
=
3 目标在导航坐标系中的位置 由于目标在坐标系P的x 轴上,因此目标在坐 标系P中的位置矢量为: rp=[xpypz.] = Oo] (8) 上式中Pt是目标的斜距。 如果坐标系N经过三次旋转成为坐标系P,三 次旋转的角度分别是 、 和‰(并且 =0), 则由式(1)到式(3)可以算得三个方向余弦矩阵 。、 和 ,转换矩阵为 = (9) 目标在坐标系N中的位置矢量为 rn=[xoyozo]
=4 rp= 三rp