多波束侧扫声纳组合扫海测量方法研究
多波束与侧扫声呐在水下探测中的应用
多波束与侧扫声呐在水下探测中的应用作者:郑晖来源:《中国新技术新产品》2020年第10期摘; 要:多波束探测与侧扫声呐扫测作为水下障碍物探测的2种常用技术手段各有优势。
就多波束探测技术而言,其优势在于通过获得精确的水深数据,实现水下障碍物的精准定位。
侧扫声呐在大范围快速获取地貌性质、形状判断中优势更显著。
基于此,该文以某水库救援项目为研究案例,对水下障碍物侧扫声呐扫测和多波束探测的具体应用过程进行分析。
结合这2种技术对水下地形环境、水下地貌进行描绘,可以实现高效互补,从而获得精确的水下地形数据和水底地貌影像。
关键词:多波束探测;侧扫声呐扫测;水下障碍物中图分类号:P229; ; ; ; ; ; 文献标志码:A0 引言水下障碍物探测是水资源开发利用的基础和前提,其能在现代化探测技术的应用下,实现水下地形及障碍物的测量,这不仅确保了水域船舶通行的安全性,而且为水下救援工作的开展提供了有效指导。
在当前的水下探测中,多波束与侧扫声呐是2种较为有效且常用的探测方式。
从本质上讲,这2种障碍物探测方式均为条带式扫海系统,其能实现水底地形的全覆盖无遗漏扫测。
但是在实际扫测中,多波束与侧扫声呐的工作原理和工作方式仍有一定差异,该文以某水库救援-测试项目为例,对多波束与侧扫声呐的实际应用要点及效果进行分析[1]。
1 系统的组成及原理1.1 多波束测深系统组成及原理1.1.1 多波束测深系统组成多波束探测系统在水下测深中得到广泛应用。
从设备结构单元来看,其包含测深设备、定位设备、罗经运动传感器、声速剖面仪和辅助设备5 个单元[2]。
其中探测设备多波束换能器决定了整个系统的数据分辨率。
差分GNSS接收机是全系统的定位装置,其在障碍物定位测量中发挥着控制测量的作用。
在多波束测深作业中,罗经运动传感器能实现测量船实时姿态及航向数据的有效采集。
声速剖面仪用来测量海区的声速剖面数据,用于校正声速曲线。
潮位信息将实测水深值换算成与国家高程系统同一的高程数据。
海洋测绘中的多波束声呐测量技术

海洋测绘中的多波束声呐测量技术介绍海洋测绘是一项重要的海洋科学研究工作,广泛应用于海洋资源开发、航海安全、海洋环境保护等领域。
而在海洋测绘中,多波束声呐测量技术被广泛应用,其高精度、高效率的测量方法,使得海底地形、水深等海洋信息得以准确获取和分析。
多波束声呐技术概述多波束声呐技术是一种采用多个信号波束同时发射和接收的测量技术。
通过不同波束的干涉、接收和处理,可以获取更加精确的海洋地形和水深信息。
多波束声呐的工作原理多波束声呐系统由多个发射和接收元件组成。
在发射时,多个发射元件会向不同方向发射声波,通过声波在水中的传播和反射,可以测得海底地形和水深信息。
在接收时,多个接收元件会接收声波的反射信号,并通过信号处理和数据融合技术,得出准确的测量结果。
多波束声呐的应用领域1. 海底地形测量和地质勘探多波束声呐技术在海底地形测量和地质勘探中具有很大的优势。
通过高分辨率的测量方法,可以获取到海底地形的细节信息,并精确测量出海底障碍物和地形的分布。
同时,多波束声呐技术也被广泛应用于海洋矿产勘探、地质灾害评估等领域。
2. 航道测量和水深测量在航道测量中,多波束声呐技术可以帮助绘制准确的航道地图,提供给船只导航和安全行驶的参考。
同时,多波束声呐技术还可以精确测量水深,帮助船只选择最佳航线,避免浅滩和障碍物。
3. 海底管道和电缆敷设在海洋资源开发中,多波束声呐技术可以帮助准确定位和布置海底管道和电缆。
通过获取到精确的海底地形和水深信息,可以提前规划和设计管道和电缆的敷设路径,减少敷设风险,并提高工程的成功率。
多波束声呐技术的优点和挑战多波束声呐技术相比传统测量技术有以下几个优势:高分辨率、高精度、快速测量等。
然而,多波束声呐技术在实际应用中也面临一些挑战,如湍流干扰、多路径影响等。
因此,需要结合其他测量技术和改进多波束声呐系统,以克服这些挑战。
结论多波束声呐技术在海洋测绘中发挥着重要作用,并且具有广泛的应用前景。
随着技术的不断更新和改进,多波束声呐系统将会更加高效、精确地获取和分析海洋地形和水深等信息,为海洋科学研究和海洋资源开发提供更好的支持。
应用侧扫声呐的海底目标探测技术研究
应用侧扫声呐的海底目标探测技术研究作者:温志坚何志敏来源:《科技创新导报》2017年第22期摘要:本文基于笔者从事侧扫声呐应用的工作经验,以海底目标探测为研究对象,探讨了侧扫声呐与多波束测深系统配合进行海底目标探测的相关思路何方法,并结合具体案例给出了探测流程和结果评价,相信对从事相关工作的同行能有所裨益。
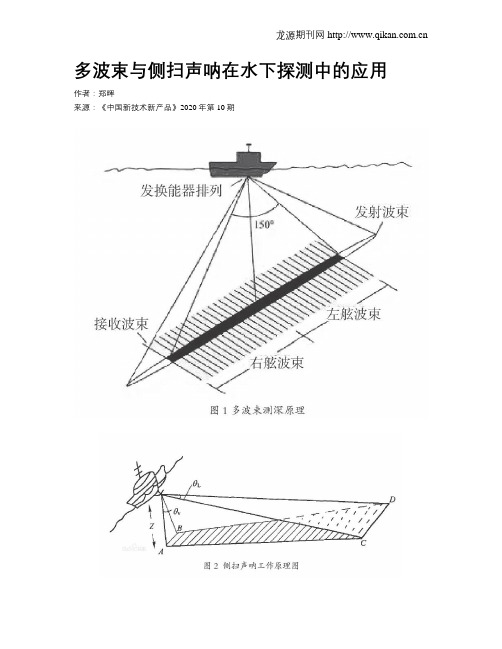
关键词:侧扫声呐海底目标探测多波束测深中图分类号:P228 文献标识码:A 文章编号:1674-098X(2017)08(a)-0028-02多波束测深系统以条带测量的方式,可以对海底进行100%的全覆盖测量,每个条带的覆盖宽度可以达到水深的数倍。
应用这种高新技术,不仅可以获得高精度的水深地形数据,还可以同时获得类似侧扫声纳测量的海底声像图,为人们提供了直观的海底形态;侧扫声纳的出现为海底探测提供了完整的海底声学图像,用于获得海底形态,并对海底物质的纹理特征进行定性的描述。
利用侧扫声纳和多波束测深系统能够探测海底地形、地貌、障碍物的特点,侧扫声纳和多波束测深系统在大陆架测量、港口疏浚、渔业捕捞、水利和生态监测、海底电缆探测、油气管道布设路径地形测绘以及轮船锚泊海区检测等方面均得到了广泛的应用,且取得了明显的效果,两者都是开发和利用海洋资源必需的仪器设备。
在水深测量精度、定位精度、声像图分辨率等方面两者又各有独特的优点,如果将两者综合起来加以应用,可有效增强不同观测数据的互补性,提高工程质量。
本文以EdgeTech 4200FS型侧扫声纳和SimradEM 1002型多波束测深系统为例来说明其在海洋目标探测中的综合应用。
1 侧扫声纳和多波束测深系统的特点多波束测深系统与侧扫声纳都是实现海底全覆盖扫测的水声设备,都能够获得几倍于水深的覆盖范围。
它们具有相似的工作原理,以一定的角度倾斜向海底发射声波脉冲,接收海底反向散射回波,从海底反向散射回波中提取所需要的海底几何信息。
由于接收波束形式的不同以及对所接收回波信号处理方式的不同,多波束测深仪通过接收波束形成技术能够实现空间精确定向,利用回波信号的某些特征参量进行回波时延检测以确定回波往返时间,从而确定斜距以获取精确的水深数据,绘制出海底地形图。
浅谈侧扫声呐结合多波束对水下物体进行探测的方法
浅谈侧扫声呐结合多波束对水下物体进行探测的方法发表时间:2020-11-30T15:32:22.117Z 来源:《基层建设》2020年第23期作者:王德江[导读] 摘要:侧扫声呐是水下物体探测的一种常见的方法,多波束扫测也是水下物体探测的一种常见方法。
交通运输部南海航海保障中心广州海事测绘中心摘要:侧扫声呐是水下物体探测的一种常见的方法,多波束扫测也是水下物体探测的一种常见方法。
本文通过在大面积水下不明物体位置探测时采用侧扫声呐结合多波束进行探测,两钟常见的探测方法相结合后,优点显而易见,可以准确、高效的完成水下物体的探测。
关键词:侧扫声呐;多波束;水下物体探测1、研究背景受湛江海事局的委托,交通运输部南海航海保障中心广州海事测绘中心对湛江港龙腾航道与斗龙航道交汇处不明碍航物进行探测。
本次水下不明物体扫测范围为3.5KM*5KM,最后要明确探测范围内是否存在不明碍航物,如果存在不明碍航物需要提供该碍航物的准确坐标及附近最浅水深。
2、测量设备图2-1 KLEIN4900侧扫声呐系统图2-2 R2SONIC2024多波束测深系统3、实际案例的数据采集及处理3.1测线布设:根据规范要求,侧扫声呐按3.5*5公里范围内,按实地间距100米布设测线,测线总长共计约300公里。
多波束测线按海图水深减去探头吃水的2.5倍间距布设测深线,间距为实地15—50米,测线总长共计约700公里。
3.2船配改正:测量船体坐标系以姿态传感器为坐标原点;X轴:垂直船艏方向,指向船右舷为正;Y轴:沿船艏方向,指向船艏为正;Z轴:铅垂方向,向下为正。
3.3多波束校准:按照既定的校准方案,在海图上大约10m深的水域附近进行了系统校准。
校准的顺序为定位时延(Latency)、横摇偏差(Roll)、纵摇偏差(Pitch)、艏向偏差(Yaw)。
定位时延和纵摇偏差的校准在航道外平坦斜坡上进行,以不同的速度行驶,采集数据时使用等角波束模式;横摇偏差的校准在海底平坦且水深较大的地方,使用等距波束模式正反向行驶,船速保证前进方向的波束交迭≥100%;艏向偏差的校准在浅水有明显障碍物的两边布置两条相邻测线使用等距波束模式进行,相邻的线有稍大于15%的覆盖率。
多波束和声纳在大面积水域中探测水下目标物的组合方法

多波束和声纳在大面积水域中探测水下目标物的组合方法摘要:侧扫声纳是目前水下探测的一种重要探测工具,有很高的探测效率和分辨率,但是定位精度差;而多波束则以高效率、高精度、高分辨率证明了它的优越性。
通过工程实例说明了侧扫声纳和多波束在大面积水域中探测水下目标物的方法,并对两者的扫测结果进行了对比分析。
充分利用多波束和声纳的扫测数据结果,可有效增强观测数据的互补性,如此既可以提高工程质量,又可以使扫测结果达到最优。
关键词:侧扫声纳;多波束;水下目标物;精度;分辨率1 引言多波束测深系统主要用于水下地形测量,应用这种高新技术,不仅可以获得高精度的水下地形数据,还可以为人们提供直观的水下三维图和类似侧扫声纳的声像图。
侧扫声纳的出现为水下目标物探测提供了完整的水下声学图像,用于获得水下地形形态[1]。
侧扫声纳和多波束测深系统都是能够实现全覆盖扫测得探测设备,能够获得几倍于水深的探测范围。
在水深测量精度、定位精度、声像图分辨率等方面两者又各有优点。
所以在多次的工程实践中,我们发现利用声纳和多波束同时来完成探测工作,可有效增强不同观测数据的互补性,将扫测结果达到最优化,提高工程质量。
本文就声纳和多波束探测时的实际效果进行对比分析。
在工作实践中,侧扫声纳采用由美国EdgeTech公司生产的EdgeTech 4200MP 型双频侧扫声纳,该系统将EdgeTech的全频谱和多脉冲技术集成与一体,是高科技数字双模式高分辨率侧扫声纳系统;多波束采用Sionc 2024型测深仪,工作频率为300kHZ,最大量程为500米。
波束个数为256个,垂直航迹方向的波束大小为0.5°,沿着航迹方向的波束大小为1.0°。
2 侧扫声纳和多波束的工作原理这两种设备均是采用向水底发射声波脉冲,并接收声波传至水底目标物后反射和散射的回波,从反射和散射的回波信息中提取我们所需要的几何信息。
(a)多波束设备连接图(b)侧扫声纳设备连接图图1 多波束和侧扫声纳设备连接示意图由于它们接收波束的形式不同以及对回波的处理方式的不同,多波束测深仪通过接收回波信号能够实现空间精确定向,利用声波在传播途中所消耗的时间来确定斜距,而每一束波束都有一个固有的波束角,从而确定斜距可以得到精确地水深信息,绘制水下地形图[2]。
多波束和侧扫声纳系统在海底目标探测中的应用
多波束和侧扫声纳系统在海底目标探测中的应用摘要:随着我国海洋资源的日益开发,海底目标的探测变得尤为重要。
本文介绍了多波束和侧扫声纳系统在海底目标探测中的应用,主要包括测量原理、系统组成和关键技术。
以南海某海域为例,采用多波束系统探测了海底目标的几何形态、面积、体积、深度等信息,并用侧扫声纳系统获取了目标的声学图像,对两种方式获取的数据进行了比较分析,探讨了多波束和侧扫声纳系统在海底目标探测中的优缺点。
结果表明:侧扫声纳系统更适合于海底目标探测,但侧扫声纳系统在浅海环境下的探测深度和分辨率远不及多波束系统;多波束声呐系统可以对海底目标进行三维立体成像,但存在一定的测量盲区。
关键词:多波束;侧扫声纳;数据处理;海底目标引言:多波束和侧扫声纳系统作为目前最常用的声呐设备,具有探测精度高、工作效率高、探测范围广、可多方位同时探测等优点,已广泛应用于海洋调查、海洋测绘、海洋环境监测等领域。
根据测量目的不同,多波束系统主要分为全波束声呐和侧扫声呐两类。
侧扫声呐系统工作时由侧扫声纳探头从海底发射声波,到达海底后通过换能器接收声波信号,并通过图像处理方法得到海底目标的三维成像信息。
全波束声呐系统则可以同时探测多个目标。
一、海底目标探测方法在水下目标探测中,通常使用换能器、多波束和侧扫声纳等设备,其中多波束声纳可同时探测多个目标,它通过发射和接收多个波束信号进行数据采集,并对目标进行三维成像。
侧扫声纳是利用海底的回波信号进行目标探测,它能实现对海底地形地貌的高分辨率和高精度探测。
在实际工程中,根据海底目标的特点,通常会采用多种方法综合应用于海底目标探测。
先用侧扫声纳对海底区域进行扫描测量,然后利用多波束声纳系统获取多个波束的三维数据。
数据处理后得到的数据文件包括原始数据文件、高精度航迹文件、坐标系文件和测深图像文件等。
在实际工程中,通常利用多波束系统获取某一区域的多个波束数据点,然后通过计算机软件处理得到海底地形地貌和海底目标的三维图像。
多波束和侧扫声纳系统在海底目标探测中的应用

差 J 。如果将 两 者综 合起 来 加 以应 用 , 可 有 效 增 强 不 同观 测数 据 的互 补 性 , 提 高 工 程 质 量 。本 文 以福 州 港江 阴港 区沉 船 附 近海 底 集 装 箱 探 测 中使 用 的
第3 3卷 第 4期
2 0 1 3年 7月
海 洋
测 绘
V0 1 .3 3. No. 4
H YD R0GRA P HI C S U RVEYI NG AND CHA RTI N G
J u 1 . . 2 0 1 3
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 1 — 3 0 4 4 . 2 0 1 3 . 0 4 . 0 1 4
的工 作原 理是 由换 能器 基 阵以一定 的倾 斜度 向海 底 发射 声 波脉 冲 , 再 接 收声 波 传 播 至 海底 或 海 底 目标
近年 来 , 随着 多 波束 测 深 系 统 和侧 扫 声 纳 的综 合 应用 , 在 探测 海 底 地 形 地貌 、 搜 寻 失事 沉 船 飞机 、
定 位 等方 面取 得 了 较好 的效 果 。其 中 , 多 波 束测 深 系统可 以获得较 为精 确 的平 面 位 置 和深 度 , 但 由于 分 辨率 的局 限 , 当开角变 大 时 , 对 海底 反 映 的详 细度 相 对较 差 ; 侧扫 声纳 则有 较 好 的成像 效 果 , 可 以 通 过深 托 , 接近 海底并 获 得 高分辨 率 的海底 图像 , 但
E d g e T e e h 4 2 0 0 一 F S 侧扫声纳和 s o n i c 一 2 0 2 2型 多
多波束与侧扫声呐在水下探测中的应用李英超1朱俊尧2

多波束与侧扫声呐在水下探测中的应用李英超1 朱俊尧2发布时间:2023-06-18T03:45:26.497Z 来源:《科技新时代》2023年7期作者:李英超1 朱俊尧2 [导读] 近年来,我国很多水下探测人员为了提高探测结果的准确性,逐渐在工作中应用多波束与侧扫声呐。
基于此,本文主要概述了多波束测深系统和侧扫声呐系统,而且分析了多波束与侧扫声呐在水下探测中的应用案例,希望可以为有需要的人提供参考意见。
1.身份证号码:37108219811221xxxx;2.身份证号码:37028119880823xxxx摘要:近年来,我国很多水下探测人员为了提高探测结果的准确性,逐渐在工作中应用多波束与侧扫声呐。
基于此,本文主要概述了多波束测深系统和侧扫声呐系统,而且分析了多波束与侧扫声呐在水下探测中的应用案例,希望可以为有需要的人提供参考意见。
关键词:多波束;侧扫声呐;水下探测对于水资源开发利用而言,水下障碍物探测是重要的基础,其可以运用先进的探测技术,准确测量水下地形及障碍物,如此一来,除了可以保证水域船舶安全通行,也能科学指导水下救援工作的进行。
在现阶段的水下探测中,经常采用的探测方法有两种,一种是多波束,另一种是侧扫声呐。
从根本上来看,这些障碍物探测手段都是条带式扫海系统,其可以扫测整个水底地形。
然而在扫测过程中,不管是多波束还是侧扫声呐,都有着不同的工作原理以及方法,此文将某个水库救援-测试项目作为例子,科学分析多波束和侧扫声呐的应用要点和应用效果。
一、多波束测深系统和侧扫声呐系统的概述(一)多波束测深系统当前,在水下测深中普遍应用多波束探测系统。
就设备结构单元来讲,通常其包含多个单元,比如:测深设备以及定位设备等等。
其中,该系统的数据分辨率容易受到很多因素影响,最为主要的是探测设备多波束换能器。
对于系统而言,差分GNSS接收机属于定位装置,在障碍物定位测量过程中其起到控制测量的重要作用。
在多波束测深过程中,利用罗经运动传感器可以迅速测量航向数据,而且对船实时姿态准确测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多波束侧扫声纳组合扫海测量方法研究
作者:刘源
来源:《科技创新导报》2019年第25期
摘 ; 要:随着海洋经济的迅速发展,海域使用开发活动日益频繁。
本文以平台就位为例,在平台就位前,对该平台周围进行了地貌及海底障碍物状况调查,并为潜水探摸提供障碍物定位。
采用GPS定位系统、多波束系统和侧扫声纳系统组合进行扫海测量,以提高声图中海底平台附近的障碍物定位精度。
关键词:声纳系统 ;海底 ;障碍物 ;扫海测量
中图分类号:P229 ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; 文献标识码:A ; ; ; ; ; ; ; ; ; ; ; ;文章编号:1674-098X(2019)09(a)-0016-02
近幾年来,随着海洋经济的发展和海洋开发的深入,海上活动愈加频繁,障碍物的存在和位置的不确定性已经制约了沿海港口建设的进一步发展,影响了舰船航行安全,尽快探清障碍物已成为当务之急。
但是传统的探测方法效率低、手段少、精度差。
本文从侧扫声纳、多波束测深、磁力仪探测能力和特点入手,结合作业实践,提出了综合利用多种手段进行探测的方法。
现有的沉船探测步骤为:(1)走访沉船海区所属辖区的海事部门收集资料,按照年代和区域进行分类;(2)以给定的概位为中心划出2km×2km的区域先用侧扫声纳进行扫测;(3)若侧扫声纳探测到目标,根据声图像量出沉船的位置、大小和高度,再用多波束在侧扫声纳探明的目标周围测量水深,测出最浅点水深并绘制一定比例尺的水深图,水深测量期间设置临时验潮站用于水位改正;(4)综合分析多波束水深数据和侧扫声图像,并用多波束最浅点修正沉船位置坐标;(5)若侧扫声纳扫测未发现沉船目标,则扩大扫测范围至4km×4km,发现目标后用多波束进行水深测量,若仍然没有发现,可用磁力仪进行探测,磁力数据有异常,说明沉船已淤于泥下。
若磁力数据无异常,说明沉船未在给定区域或已清除。
相对来说,对于疑存雷区和未爆炸弹探测手段很少,现在最有效的手段是磁法探测,用磁力仪定深探明水雷和未爆物的位置,但磁法探测要求高、效率低、探测区域大,只能逐年分块进行探测。
1 ;仪器工作原理和技术要求
1.1 侧扫声纳
1.1.1 侧扫声纳工作原理
侧扫声纳利用换能器向船航行方向两侧发射具有一定指向性的高频声波束,声波束照射到左右两侧一定宽度范围内的海底表面,声波触及海底表面上的地物产生返向的散射声波,从声图像中检出海底表面上的地物性质、大小、高度。
侧扫声纳拖曳式测量拖鱼远离工作船,可大大降低干扰噪声,工作稳定,不受船体俯仰摇摆影响,传播条件良好。
用侧扫声纳探测作业效率高,声图像反映沉船直观,容易判断,是探测沉船的首选方法。
1.1.2 技术要求
探测时要遵守以下技术要求。
测线布设:测线布设要全覆盖。
航速:测船的航速不超过6kn,测量时尽量保持匀速直线行驶。
海况:风速5级以下,波浪轻浪。
风浪大时侧扫声纳拖鱼在水中起伏,影响声图像质量,同时水体噪声增强。
定位精度:使用高精度的 DGPS。
拖鱼高度:拖鱼离海底的高度控制在侧扫量程的10% ~15%。
量程:一般粗扫测用150m量程档,精扫测用75m量程档。
加密测量:对探测目标不少于2个取向加密,可以减少目标位置中误差,提高沉船位置精度,加密测量时测船航速控制在2~3kn,以增加探测目标的声图像素。
2 ;侧扫声纳系统拖鱼的精确定位
侧扫声纳的扫海测量涉及以下几个坐标系统:拖鱼坐标系、船体坐标系、测量坐标系。
简述如下:
(1)拖鱼坐标系是以拖鱼中心为坐标原点,拖鱼前进方向为x轴,以垂直向下为y轴。
(2)船体坐标系主要是以船体中心或GPS定位点为坐标原点,船艏方向为x轴方向,垂直于船体方向为y轴方向(右舷为正),垂直向下为z轴方向,组成右手坐标系。
船体坐标系主要是利用船舶导航定位系统确定拖体的坐标。
测量时需要有船舶艏向和GPS点与拖体之间的相对位置关系。
(3)测量坐标系是海洋施工定位测量,一般情况下使用WGS 84坐标系或1954北京坐标系。
如果测量范围不大,可以采用三参数法进行坐标转换,如果范围较大,则需要七参数。
如果需要更高精度的定位,可以采用GPS RTK的定位模式。
在侧扫声纳扫海测量中,一般认为海底平坦,且拖鱼位于测船正后方。
基于这两点假设,可采用多波束测深信息确定拖鱼位置,使障碍物精确定位成为可能,如图1所示。
在侧扫声纳扫海测量中,一般认为海底平坦,且拖鱼位于测船正后方。
基于这两点假设,可采用多波束测深信息确定拖鱼位置,使障碍物精确定位成为可能,如图1所示。
3 ;测线的技术设计
根据调查目的,为保证调查区域侧扫声纳全覆盖,本次调查过程中分别布设东西向和南北向侧线。
其中东西向靠近平台处按照10m间距布设,远离平台区按20m间距布设。
南北向按100m间距布设了两条检查线。
调查中,尽量保持TVG不变,以保证图像的灰度一致,每条测线图像清晰。
高低频单侧量程均使用100m,保证海底全覆盖调查。
航行时实际测线偏移没有超过设计间隔的20%,航速保持稳定,船速5kn左右。
资料采集过程中解释人员进行现场解释,发现如洼地、障碍物为特殊地貌地物时,现场分析判断,做出是否进一步探测的决定,并做好记录。
采用Discover 软件回放现场采集的地貌数据,提取平台桩腿、管线和钻井平台遗留洼地实际坐标以及海底可疑物坐标和尺寸,并对侧扫声纳数据进行偏移量改正、倾斜改正、TVG 调节等必要的处理,计算海底可疑物体准确位置。
4 ;应用实例分析
本文结合某工程实践——平台障碍物调查工程,调查宽80m、长100m范围的某平台预就位区域内,是否有影响平台就位的海底障碍物。
主要仪器有DSM232 GPS/信标接收机(Trimble)、HY1600型精密回声测深仪和EdgeTech 4200-FS双频侧扫声纳系统。
利用Hypack_MAX软件,依据测深记录模拟打印卷,对数字化采集的水深值进行检查比对。
在比对水深时,对因受风浪影响测深回波信号呈波浪状时的水深值从距波峰1/3波峰波谷之差处量取,水深摘录精确至0.1m。
水深摘录完毕后,进行主测线与检查测线的水深比对,两测线相交处水深差值为0~0.1m,符合规范要求。
100%的检查完毕确定无误后进行水位改正。
本次测量过程中,水位采用预报潮位,然后输出成图。
表1为平台角点坐标,根据侧扫声纳扫海设备对平台北侧100m×80m范围进行的水深测量和地貌调查,发现洼地9个,明显障碍物1个。
洼地1、洼地2、洼地3 紧靠平台;其宽度分别为24.5m、26.2m、33.1m;其深度分别为0.9m、0.9m、0.6m。
洼地4~洼地9离QK172E平台较远,其中洼地4、洼地5 与洼地6 紧密相连,洼地7与洼地8 也相互连接,估计为以前施工痕迹;各个洼地宽度分别为33.2m、27. 3m、20.8m、25.8m、35.7m、25.3m;各个洼地深度分别为0.7m、0.6m、0.7m、0.8m、0.7m、0.6m。
障碍物位于洼地1中,其图像显示为一个点状物体,突出海底约1.3m。
经过潜水探摸后,确定为一堆废弃渔网。
5 ;结语
侧扫声纳系统在扫海测量时,能够给出高分辨率的声强信息,但其位置信息精度低。
本文采用GPS 定位系统、多波束系统和侧扫声纳系统组合进行扫海测量,可提高拖鱼的位置推算精度,改善以往单一侧扫系统目标位置精度低的问题。
结果表明了該方法对海底目标物扫测有较高的适用性,有效提高目标位置精度。
参考文献
[1] 赵建虎.现代海洋测绘[M].武汉:武汉大学出版社,2017.
[2] 叶久长,刘家伟.海道测量学[M].北京:海潮出版社,2013.
[3] 王闰成,卫国兵.多波束探测技术的应用[J].海洋测绘,2003,23(5):66-71.。