雷达防撞系统
基于超声波的倒车雷达
基于超声波的倒车雷达摘要:随着生活质量的提高,工作的需要,科技的发展,人们将越来越多的在生活中和工作中将汽车作为其日常的生活工具。
给汽车安装倒车雷达系统,将使汽车安全性大大提高,以确保行车安全。
本文的内容是基于超声波测距的倒车防撞系统的设计,将超声波测距系统和AT89S52单片机结合于一体,设计出一种基于AT89S52单片机得倒车防撞系统。
驾驶员能够通过系统的声音、显示,清楚车后障碍物的状况,并通过报警信号避免撞车,安全倒车。
关键词:倒车雷达单片机超声波报警显示一、技术指标:1、系统设计要求汽车倒车雷达预警系统由三个部分组成,分别为测距部分、控制系统部分和显示报警部分。
本系统的主要功能是:1.当汽车倒车时能实时显示、LED显示车与障碍物的距离值:XXX厘米。
使驾驶员能随时看到车后的障碍物距离汽车的距离。
2.超声波探测距离不小于1米,当在探测的范围有障碍物时,蜂鸣器提示报警。
3.汽车与障碍物不同距离时,发出不同的警报声。
距离越近蜂鸣器的报警频率也越大,当距离小于最小安全距离时,蜂鸣器不间断报警。
二、方案比较与论证:2.1测距系统方案设计目前汽车倒车雷达预警系统测距技术主要有激光、毫米波雷达、摄像系统、红外线、超声波等一些测距技术,不同的目标探测方式其工作过程和原理有不同之处,但它们的主要目的都是通过前方返回的探测信息判断前方车辆和本车间的相对距离,并根据两车间的危险性程度做出相应的预防措施。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,并且利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
由上述叙述可知,超声波测量能够达到系统中所要求的测量精度,一般应用在汽车倒车系统上。
2.2控制系统方案设计在控制系统的方案选择上,由于整个系统的设计涉及到数据处理,控制实时性等问题,选用基于微控制器的系统,电路的实现不仅简单而且成本低、功耗低、能大大缩小整个系统的体积。
基于毫米波雷达测距的汽车防撞系统研究
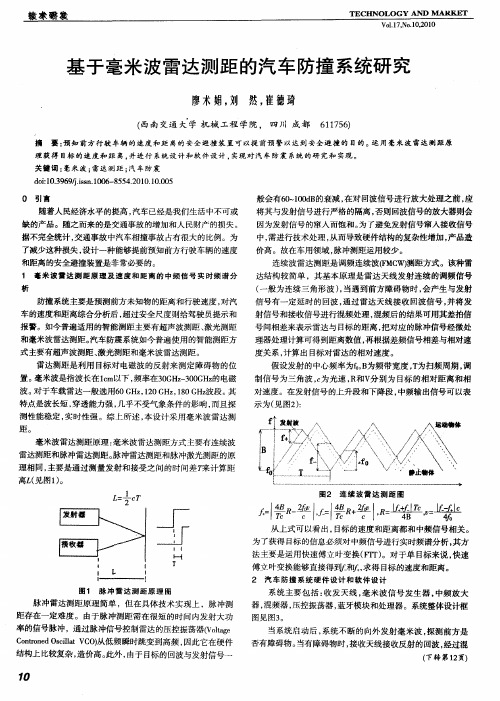
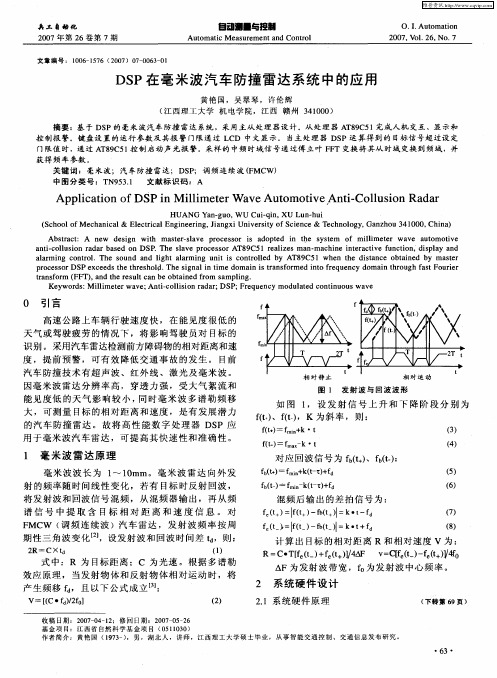
达结构较简单 ,其基本原理是雷达天线发射连 续的调频信号 ( 一般为连续三角形波 ) 当遇到前方障碍物时 , , 会产生与发射 信号有一定延时 的回波 , 通过雷达天线接收回波信 号 , 并将发 射信号和接收信号进行混频处理 , 混频后 的结果雷达 测 距 原 理 简单 ,但 在具 体 技 术 实 现 上 ,脉 冲测
距存 在一定难度 。由于脉 冲测距需在很短 的时 间内发射大功
率的信号脉冲,通过脉 冲信号控制雷达 的压控振荡器f。a V lg t
C n oe si tV 0从低频瞬时跳变到高频 , ot ndO cl C ) r l a 因此它在硬件 结构上 比较复杂 , 造价高。 此外 , 由于 目标 的回波与发射信号一
£ =1 c T
图2
连 续 波 雷 达 测 距 圈
_ I一 箦
T
+ 孚
从上式可 以看出 , 目标 的速度和距离都和 中频信号相关 。
为 了获 得 目标 的 信 息必 须 对 中频 信号 进 行 实 时频 谱 分 析 , 方 其
法主要是运用快速傅立叶变换 ( 兀 ) 。对 于单 目标来说 , 快速
O 引 青
般会有6 0 d 的衰减 , 0 10 B 在对 回波信号进行放大处理 之前 , 应
随着人民经济水平 的提高 , 汽车已经是我们生活中不可或
缺的产品。随之而来 的是交通事故 的增加和人 民财产 的损失。
据不完全统计 , 交通事故中汽车相撞事故 占有很大 的比例 。为 了减少这种损失 , 设计一种能够提前预知前方行驶车辆的速度 和距离 的安全避撞装置是非常必要的。
倒车雷达[总结]
![倒车雷达[总结]](https://img.taocdn.com/s3/m/e410bbeaf605cc1755270722192e453610665b87.png)
保障汽车驾驶时的自动性、舒适性和安全性是智能汽车一直追求的目标。
为保障驾车安全,发展汽车防撞技术十分关键。
世界各国对汽车防撞技术的研究和发展投入了大量的人力、物力和财力。
而这一技术的关键却是车辆测距技术。
汽车必须凭借一定的装备测量前方障碍物的距离,并迅速反馈给汽车,以在危急的情况下,通过报警或自动进行某项预设定操作如紧急制动等,来避免由于驾驶员疲劳、疏忽、误判断所造成的交通事故。
据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的 60%。
与此同时,在智能汽车中,测距并反馈路况信息是汽车的自动化行驶的关键。
由此可见,测距技术对保障行车安全,提高汽车智能化水平有重要意义。
现在运用在汽车上的测距方法主要有超声波短距离测距,毫米波雷达长距离测距,摄像系统测距,激光测距,夜间应用的红外线测距等几种方法。
—、超声波距离测距超声波一般指频率在20KHE以上的机械波,具有穿透性较强、衰减小、反射能力强等特点,超声波测距仪器一般由发射器、接收器和信号处理装置三部分组成。
工作时,超声波发射器不断发出一系列连续的脉冲,并给测量逻辑电路提供一个短脉冲。
超声波接收器则在接收到遇障碍物反射回来的反射波后,也向测量逻辑电路提供一个短脉冲。
最后由信号处理装置对接收的信号依据时间差进行处理,自动计算出车与障碍物之间的距离。
超声波测距原理简单,成本低、制作方便,但其在高速行驶的汽车上的应用有一定局限性,这是因为超声波的传输速度受天气影响较大,不同的天气条件下传播速度不一样;另一方面是对于远距离的障碍物,由于反射波过于微弱,使得灵敏度下降。
故超声波测距一般应用在短距离测距,最佳距离为4—5米,一般应用在汽车倒车防撞系统上。
二、性能稳定的毫米波雷达长距离测距雷达是利用目标对电磁波反射来发现目标并测定其位置的。
汽车上应用的雷达采用的是30GHZ以上的毫米波雷达。
毫米波频率高、波长短,一方面可缩小从天线辐射的电磁波射束角幅度,从而减少由于不需要的反射所引起的误动作和干扰,另一方面由于多普勒频移大,相对速度的测量精度高。
一种汽车激光雷达自动防撞微机控制系统的研究

的一个环节, O 以上的事 故是 由于司机反映不及 8 时或判断失误引起 的, 故要求驾驶员注意力高度集
中, 时时注意保持车距. 这样 的状况下 , 在 驾驶辅 助系
统的开发显得意义重大. 因此 , 对汽车激光雷达 自动 防撞微机控制系统的研究具有十分重要的意义.
VO . 5 No 4 12 .
Au . 0 6 g2 0
文 章 编 号 :0 14 7 (0 6 0 —0 90 10 —3 3 2 0 ) 40 9 —3
一
种 汽 车激 光 雷 达 自动 防撞 微 机控 制 系统 的研 究
战绪庶 , 王 紫婷 , 战绪仁
( 兰州交通大学 电子与信息工程学院 , 甘肃 兰州 707) 300
用 3 位嵌入式系统 ( R 技术进行数据处 理, 2 A M) 用 凌阳 1 6位单 片机具有 强大 的语 音存储 功 能 (2 18
, ’
激 光
达光学 H 卜’ .
天线 l
高 速 转
换
MD
监测 I
雷 达
r - ’
器 I数 码管显示距离
图 1 装 置 原 理 框 图
作者简介 : 战绪庶( 9 9) 男 , 1 7一 , 山东青岛人 , 硕士研究 生.
维普资讯
1自然 科 学 版 )
第 2 5卷
2 1 测 距 的实 现 .
装置结构包括发光部、 受光部、 计算车间距离的 激光雷达 、 信号处 理模块 、 显示装置、 车速传感器 等
Fi. F o c a ft e p i c p eo h ed v c g1 lw h t o h r n r l ft e ie
基于DSP与IVS-179的汽车雷达防撞预警系统
d a a t s h o w t h a t he t s y s t e m i s s t a b l e a n d r e l i a b l e ,a n d i t h a s he t f o l l o wi n g f e a t u r e s : s ma l l v o l u me ,d i s an t c e
Ke y wo r d s: TMS 3 2 0VC5 5 0 9A; I VS一 1 7 9; a ut o mo t i v e a n i— t c o l l i s i o n;mi l l i me t e r r a d a r wa v e;F MCW
0 引 言
2 0 1 3 年第5 期
文章编号 : 1 0 0 9—2 5 5 2 ( 2 0 1 3 ) 0 5— 0 1 2 5— 0 4 中图分类号 : T N 9 5 3 . 2 文献标识码 : A
基于 D S P与 I V S 一 1 7 9的汽 车雷 达 防撞 预警 系统
林 阳,高红 民
L ED d i s pl a y a n d v o i c e a l a r m wa y p r o mp t d iv r e r s,r e a c h t h e p u r po s e o f s a f e d iv r i ng .T he e x p e ime r n t a l
Ab s t r a c t :A s e t o f r a d a r c o l l i s i o n w a r n i n g s y s t e m i s d e s i g n e d b a s e d o n t h e D S P T MS 3 2 0 VC 5 5 0 9 A a n d I V S 一 1 7 9 mi c r o r a d a r c h i p .T h e s y s t e m c o u l d b e u s e d f o r r o a d v e h i c l e s i n f r o n t o f he t r e a l — t i me d e t e c t i o n, he t D S P c h i p p r o c e s s i n g g a i n f r o n t v e h i c l e o r o b s t a c l e s o f r e l a t i v e d i s t a n c e a n d s p e e d i n f o r ma i t o n,a n d he t
一种雷达防追尾预警系统设计

一种雷达防追尾预警系统设计一种雷达防追尾预警系统设计1引言追尾碰撞是目前我国高速公路各类事故中较多的一类事故,占事故总数的33%左右。
根据对沈大、合宁、广深、西临等高速公路交通事故的统计分析,交通事故类型如表1所示。
有关研究表明,若驾驶员能够提早1秒意识到有事故危险并采取相应的措施,则90%的追尾事故和60%的正面碰撞事故都可以避免。
美、英、德、日的不少汽车公司(如德国的奔驰、日本的三菱、马自达、日产、本田及富土重工等公司)都开展了高速公路车载毫米波雷达防追尾碰撞预警系统的研究。
我国主要有清华大学、浙江大学、上海交通大学、吉林大学等高校和部分研究所在进行车辆主动防撞报警、辅助驾驶系统等相关技术研究。
例如上海交通大学卓斌教授等研究开发了“人—车—路综合环境下主动安全性模拟系统”,实现了行车环境数据采集、通讯和驾驶软件仿真的编制。
在现行的高速公路交通管理中,为保证行车安全,常依据公路工程技术标准中的行车视距要求,规定一定行驶速度下的车辆必须保持相应的间距。
那么如何准确跟踪车辆之间的距离信息,就成了汽车毫米波雷达防追尾预警系统的关键。
把交互多模型(IMM)机动目标跟踪算法运用到汽车毫米波雷达防追尾预警系统当中,当毫米波雷达存在一定测量误差和噪声时,目标跟踪算法能使毫米波雷达能够准确地探知前方车辆的运动状态,如车间距离、行驶速度等,从而提高驾驶员在高速公路上行驶安全性。
2汽车防追尾预警系统工作原理高速公路汽车防追尾预警系统由信息采集单元、信息处理单元和信息输出装置3部分组成。
信息采集单元通常由毫米波雷达、自车速度传感器、转向角传感器、制动传感器、加速踏板传感器和路面情况选择开关等组成;信息处理单元主要为中央处理器;信息输出装置包括液晶显示屏、报警蜂鸣器、报警指示灯等,图1是车载雷达防追尾预警系统组成方框图。
信息采集单元不断地采集相关信息,利用车载毫米波雷达获得前方目标车辆的运动信息,如车间距离、相对速度;利用自车传感系统获得自车运行状态信息,如自车速度、有无转向、有无制动等,并将此信息传送至信息处理单元。
FPGA的车载防撞雷达系统的设计与实现

DSP在毫米波汽车防撞雷达系统中的应用
HUANG n g o W U iq n XU n h i Ya - u , Cu - i , Lu — u
( c o l f c a ia & E e t c l n ie r g Ja g i ie s y o ce c S h o o Me h n c l lcr a E g n e i , in x v r i f in e& T c n lg , n h u3 1 0 , h n ) i n Un t S e h o o y Ga z o 4 0 0 C i a