envi的图像配准
遥感图像配准
1.实习目的:遥感图像的配准2.实习内容:2.1掌握ENVI自定义坐标,以及基于地形图的遥感影像配准过程。
2.2本次实习中带有地理坐标的西安市城区地形图被用作基准影像,对资源三号全色影像进行配准。
在此基础上,以纠正后的全色影像为基准,校正资源三号多光谱影像,用于下节的图像融合。
3.实习步骤:3.1 基于地形图配准全色影像的具体操作步骤:3.1.1 打开并显示资源三号全色影像与地形图1)从ENVI主菜单中,选择File → Open Image File。
加载地形图文件和全色影像到可用波段列表Available Bands List中;2)点击Load RGB将地形图加载到显示窗口display#1;3)在可用波段列表Display #1下拉菜单,点击New Display按钮,并从下拉式菜单中选择New Display。
点Load RGB按钮,将全色影像加载到一个新的显示窗口display#2。
3.1.2 修改地形图头文件中的地图信息由于地形图为西安80坐标系,而ENVI系统自带的投影文件中并没有相关基准面和椭球体,因此打开的地形图无法正确显示地图信息Map Info;1)定义椭球体,进入ENVI安装目录:C:\Program Files\ITT\IDL71\products\envi47\ map_proj,打开椭球体文件ellipse.txt,在最后一行增加IAG-75,6378140.0, 6356755.3;2)定义基准面,在相同的目录,打开基准面文件datum.txt文件,在最后一行增加D_Xian_80,IAG-75,0,0,0;3)在可用波段列表中,右键点击地形图文件,选择Edit Header,从弹出的窗口的EditAttributes的下拉箭头中选择Map Info,进入Edit Map Information。
输入图像左上角XY 坐标与像素大小;选择Change Proj,新建投影,输入相关参数3.1.3影像配准1)从ENVI主菜单栏中,选择Map → Registration → Select GCPs: Image to Image;2)在Image to Image Registration对话框中,点击并选择Display #1 (地形图),作为BaseImage。
实习2 遥感图像的配准

1、实习目的结合遥感图像几何精校正原理,掌握遥感图像的几何精校正操作步骤和过程。
2、实习内容①、基于ENVI软件,以SPOT影像为参考图像,对TM影像进行几何精校正;②、基于地面控制点的地理坐标,对TM影像进行几何精校正。
3、实习数据及软件ENVI软件及SPOT、TM影像。
4、实习步骤以SPOT影像为参考图像,对TM影像进行几何精校正德操作过程。
(1)、相对配准①、打开SPOT(单级数黑白)影像:File → Open Image File → bldr_sp.img打开TM(多级数)影像:File → Open Image File → bldr_tm.img②、Map → Registration(配准/几何精校正)→ Select GCPs:Image to Image → Base Image(参考图像)选中Display#1 SPOT影像→ Warp Image选中Display#2 TM影像→选择标志地物建立控制点,Degree为1(所以控制点至少为3个),分别在两图上找出相对应的点,定位→ Add Point → Show List 中可以查看控制点详情。
保存控制点:File → Save Tables to ASCⅡ→ Choose选择保存路径→OK(2)、空间坐标转换在Ground Control Points Selection 窗口选择Options → Warp File →选择bldr_tm.img → OK → Method选择Polynomial(多项式)→ Resampling (重采样)选择Bilinear(双线性)→ Background改为225 → OK(3)、绝对配准Map → Registration(配准/几何精校正)→ Select GCPs :Image to Map → Zone选择13 → OK →采用经纬度来确定控制点的坐标(查看SPOT图像→右键相同点Pixel Locator获得经纬度)→ Add Point后续操作和相对配准类似。
ENVI实习(三)
第三部分:图像配准镶嵌融合、地质解译及制图十四、图像配准(几何校正)(一)实验目的通过实习操作,掌握使用ENVI进行图像对图像几何校正的方法与步骤。
(二)实验背景与原理遥感图像成像时,由于飞行姿态、高度、速度地球自转等因素而造成图像相对于地面目标而发生几何畸变,消除或者减弱其影响的过程即几何校正的过程。
几何校正主要是利用若干控制点,建立不同图像间(基准影像和待纠正影像)的多项式空间变换和像元插值运算,实现遥感图像与实际地理图件间的配准,达到消减甚至消除遥感图像几何畸变的目的。
由于校正过程会将坐标系统赋予图像数据,因此几何校正的过程包括了地理参考过程。
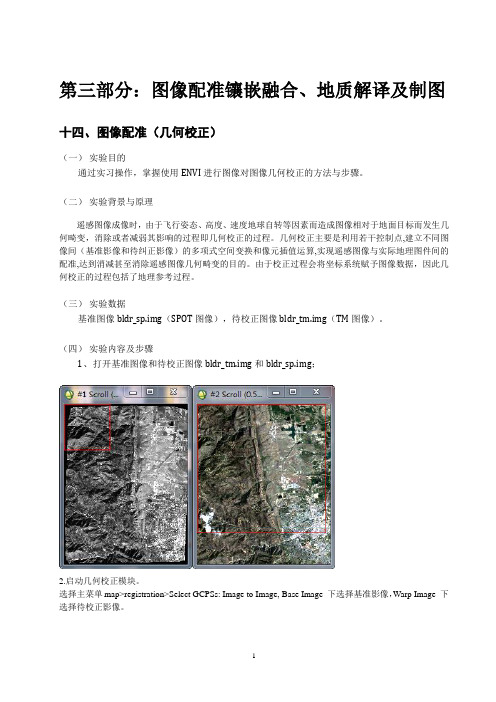
(三)实验数据基准图像bldr_sp.img(SPOT图像),待校正图像bldr_tm.img(TM图像)。
(四)实验内容及步骤1、打开基准图像和待校正图像bldr_tm.img和bldr_sp.img;2.启动几何校正模块。
选择主菜单map>registration>Select GCPSs: Image to Image, Base Image 下选择基准影像,Warp Image 下选择待校正影像。
3、采集地面控制点。
打开采集地面控制点Group Control Points Sel ection对话框,在基准影像中选点,在待校正影像中选择对应位置的点,应尽可能选择相对稳定且易于识别定位的点(如水系汇合点、山脊交叉点、其它固定线性影像交叉点,独立标志性地物等),并使控制点均匀分布在图幅范围内。
然后点击Add Point按钮,添加控制点。
当点数达到三个及以上时,点数后的Predict按钮会变可用。
此时,在基准影像中选择一点,点Predict 按钮,ENVI会在待校正影像中预测一点,不需手动选择。
还可选中Options下的Auto Predict,此时,在基准影像中选点,ENVI会自动随时自动选择相应点。
当点数达到五个及以上时,选择Options下的Automatically Generate Tie Points…,打开下窗口,设置基准影像与待校正影像自动选择点。
ENVI中影像镶嵌的方法

ENVI中影像镶嵌的方法ENVI是一种用于处理和分析遥感数据的软件工具。
它提供了许多方法和功能,可以对影像进行镶嵌,以生成一幅无缝的图像。
影像镶嵌是将多个部分影像组合在一起,形成一幅完整的影像的过程。
在ENVI中,可以使用不同的技术来进行影像镶嵌,包括基于特征的匹配、基于掩码的镶嵌和基于影像分块的镶嵌。
其中一种常用的方法是基于特征的匹配。
该方法将多个部分影像中的特征进行匹配,以确定它们在空间上的对应关系。
特征可以是像素的灰度值、边缘、纹理等。
首先,需要选择一个参考影像,该影像通常是质量较高的影像,然后在其他影像中提取相应的特征。
在ENVI中,可以使用不同的工具和算法来提取和匹配特征。
一旦特征匹配完成,便可以使用投影变换或图像配准算法将影像对齐。
最后,使用图像融合算法将对齐的影像进行合并,生成一幅无缝的图像。
另一种常用的方法是基于掩码的镶嵌。
该方法通过使用预先创建的掩码来确定影像间的对应关系。
掩码是一个二进制图像,其中非零值表示中要保留的像素,而零值表示要丢弃的像素。
首先,需要创建一个掩码,用于指定要保留或丢弃的像素区域。
然后,在ENVI中使用掩码进行影像配准和镶嵌。
掩码可用于去除重叠区域中的不需要的像素,或将多个像素合并为一个像素,以防止重叠区域中的像素重复。
最后,使用图像融合算法将处理后的影像合并为一幅无缝的图像。
另一种常用的方法是基于影像分块的镶嵌。
该方法将影像划分为多个块,对每个块进行独立的处理和镶嵌。
首先,需要选择一个参考影像,并将其划分为块。
然后,将其他影像划分为相同的块,并将每个块与参考影像中的相应块进行配准和镶嵌。
最后,将所有块的结果合并为一幅无缝的图像。
基于影像分块的镶嵌方法适用于处理大尺寸的影像,可以提高处理效率和计算速度。
除了以上提到的方法,ENVI还提供了其他一些影像镶嵌方法,如基于正规化植被指数(NDVI)的镶嵌、基于多波段融合的镶嵌等。
这些方法使用不同的技术和算法,旨在解决不同的镶嵌问题和需求。
ENVI实习直方图匹配,校正,分类
ENVI实习一实验目的(1)主要学习ENVI软件的基本功能(2)ENVI 软件完成影像增强(包括直方图匹配和去云)、融合、正射校正和监督、非监督分类四个大方面的试验。
(3)掌握视窗操作模块的功能和操作技能二软件和设备ENVI4.5一套三实验原理各个任务的试验原理和操作详细见下面操作,再次不详述。
一、图像增强(算法、原理、对比图)1、直方图匹配在ENVI 中使用Histogram Matching 工具可以自动地把一幅实现图像的直方图匹配到另一幅上,从而使两幅图像的亮度分布尽可能地接近。
使用该功能以后,在该功能被启动的窗口内,输入直方图将发生变化,以与所选图像显示窗口的当前输出直方图相匹配。
在灰阶和彩色图像上,都可以使用该功能。
操作步骤:选择Enhance > Histogram Matching,出现Histogram Matching Input parameters 对话框,在Match To中选择想匹配的图像。
在Input Histogram 会有Image、Scroll、Zoom、Band、、ROI来选择如数直方图的来源,下图为输入图像数据及其所用的拉伸(直方图匹配之前):下图为Match To 想匹配的图像及其拉伸:利用直方图匹配后图像2的直方图结果:从结果可以看出,匹配后的图像在亮度上已经明显增强,从偏暗增强为较亮;其直方图与#1中的图像直方图在亮度上分布也很接近。
2、图像去云常规的云处理算法会随云的覆盖类型的不同而不同,对在大范围内存在薄云的影像来说,采用同态滤波法较好。
同态滤波法把频率过滤与灰度变化结合起来,分离云与背景地物,最终从影像中去除云的影响,这种方法由于涉及到滤波器以及截至频率的选择,在滤波的过程中有时会导致一些有用信息的丢失。
对于局部有云的影像来说,一般使用时间平均法,这种算法适用于地物特征随时间变化较小的地区,如荒漠、戈壁等地区;对于植被覆盖茂密的地区,由于植被的长势与时间有密切的关系,不同时相的植被长势在影像中有明显的区别,这种简单的替代算法不再适用。
ENVI实验指导书

遥感图像处理实验指导实验一图像处理软件ENVI4功能介绍实验二影像的配准实验三图像融合实验四波段组合计算及图像增强实验五图像分类实验六地图制图实验一图像处理软件ENVI4功能介绍1 ENVI4支持文件格式ENVI使用的是通用的栅格数据格式,包含一个简单的二进制文件和一个相关的ASCII的头文件。
读该文件格式允许ENVI使用几乎有的影像文件,包括那些自身嵌入头文件信息的影像文件。
通用的栅格数据都会存储为二进制的字节流,通常它将以BSQ(按波段顺序)、BIP(波段按像元交叉)或者BIL(波段按行交叉)的方式进行存储。
ENVI软件支持的数据类型,包括字节型,整型,无符号整型,长整型,无符号长整型,浮点型,双精度浮点型,复数型,双精度复数型,64位整型,以及无符号64位整型。
2 ENVI的窗口和显示使用ENVI软件时,打开图像通常有三个窗口,即主影像窗口(Main Image Window)、滚动窗口(Scroll Window)和缩放窗口(Zoom Window),见图1.1。
图1.1 ENVI显示窗口组:主影像窗口、滚动窗口和缩放窗口2.1 ENVI主菜单ENVI主菜单位于显示窗口的顶部,在默认情况下,它显示于主影像窗口的顶部,并提供交互式的影像显示和分析功能,见图1.2。
如果所选的显示组中不包括主影像窗口,那么菜单将会出现在滚动窗口或者缩放窗口的顶部,同ENVI 其他的菜单一样,从该菜单中可以选择任意的菜单选项。
此外,在任何一个显示窗口点击右键会弹出一个快捷菜单。
通过这个菜单可以访问显示函数,也可以改变显示的设置。
图1.2主影像窗口中的overlay菜单和快捷菜单2.2 可用波段列表ENVI可以打开影像文件或者这些文件中的单个波段。
可用波段列表(Available Bands List)是一个特殊的ENVI对话框,它包括了所以被打开文件中可用的影像波段,以及与此相关的地图信息列表,见图1.3。
使用波段列表可以把彩色和灰阶影像加载到一个显示窗口中,可以直接打开一个新的显示窗口,也可以点击对话框底部的Display按钮,并从中选择显示窗口号,打开相应的显示窗口,然后点击Gray Scale 或者RGB单选按钮,再从列表中点击波段名,选择所需要的波段,加载显示影像。
雷达图像处理(ENVI)

雷达图像处理ENVIENVI提供基本的雷达图像处理功能,包括雷达数据格式支持、雷达文件定标、消除天线增益畸变、斜距校正、入射角图像生成、斑点噪声压缩、合成彩色图像等。
多标准ENVI图像处理功能也可以用于处理雷达数据的处理,如图像显示功能、图像拉伸、颜色处理、图像分类、几何校正、图像配准、卷积滤波、图像融合等。
目前,大所述雷达成像系统都是侧视成像,这种雷达系统所测量的距离是目标物到平台一侧的距离(倾斜距离),基于这种几何系统获得的图像叫斜距图像。
雷达斜距数据在侧向范围有系统几何畸变,实际上,由于入射角的变化使得垂直侧向范围的地距和像素大小发生变化。
因此,要使用雷达图像,必须经过从斜距到地距的校正处理。
自适应滤波器被设计成对斑点噪声压缩的同时,对图像分辨率的减少是微笑的。
自适应滤波器运用围绕每个像元值标准差来计算一个新的像元值。
不同于传统的低通平滑滤波,自适应滤波器在抑制噪声的通透式保留了图像的高频信息和细节。
Lee滤波器用于平滑亮度各图像密切相关的噪声数据以及附加或倍增类型的噪声。
增强型Lee滤波器可以在保持雷达图像纹理信息的同时减少斑点噪声。
Frost滤波器能在保留边缘的情况下,减少斑点噪声。
增强型Frost滤波器可以在保持雷达图像纹理信息的同时减少斑点噪声。
Gamma滤波器可以用于在雷达图像中保留边缘信息的同时减少斑点噪声。
Kuan滤波器用于在雷达图像中保留边缘的情况下,减少斑点噪声。
Local Sigma滤波器能很好地保留细节并有效地减少斑点噪声,及时是在对比度较低的区域。
Bit Error Filters比特误差误差滤波器可以消除图像中的”bit-error”噪声。
遥感envi图像镶嵌和融合心得体会
遥感envi图像镶嵌和融合心得体会遥感 envi 图像镶嵌和融合心得体会,通过对 envi 软件与遥感图像处理的有机结合使二者相互匹配完成的。
遥感图像在很大程度上取决于该地区图像资料数据质量的优劣和丰富程度。
因此对于遥感图像镶嵌是有效的处理方法。
而遥感图像的分类标准也为遥感图像融合打下基础。
本文将对如何运用遥感 envi 进行图像拼接和融合做详细介绍,最后再次总结遥感 envi 软件的特点以及其应用。
关键词:遥感;遥感 envi;图像;拼接;融合遥感 envi 图像融合简介遥感 envi图像融合,就是根据不同来源的遥感影像信息的空间分布和特征属性,利用遥感数字图像分析处理技术(即计算机视觉)和专业知识对遥感影像数据进行处理,使之成为具有一定内容的图像或视频流,可供研究人员加工利用。
同时,还要对这些图像流的某种空间变化规律和模式进行揭示和解释,并且产生新的信息内涵的技术和方法。
由于影像数据采集主体的多样性、影像格式与内容的复杂性等原因,传统遥感数据与空间数据库系统结合已不能满足实际需求。
基于遥感技术和网络技术的新型遥感数据管理与服务平台的出现,为解决这一问题带来了契机。
由此可见,借助遥感影像融合,将多源遥感数据整合到一个有序的框架中,为用户提供快速获取所需数据服务是一条切实可行的途径。
遥感图像拼接原理1.1目标检测首先选择一幅较小的空白遥感图像作为待处理的源图像。
1.2图像拼接在所述待处理的源图像上进行像素的选择和排列,并调整图像大小,从而达到所期望的效果。
然后执行所述的空白遥感图像检测算法,以确保源图像能够满足拼接的需求。
1.3像素间的空间配准在确定源图像无冗余或冗余很少情况下,通常采用直线配准法进行像素的位置和几何尺寸的预处理,以达到理想的配准精度。
在拼接中也需要进行配准操作。
通过遥感数据拼接技术将空间分辨率相近的卫星影像进行叠加合成,最终形成满足要求的影像拼接。
遥感图像融合简介遥感图像融合,就是根据不同来源的遥感影像信息的空间分布和特征属性,利用遥感数字图像分析处理技术(即计算机视觉)和专业知识对遥感影像数据进行处理,使之成为具有一定内容的图像或视频流,可供研究人员加工利用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
请教对ETM+进行几何校正的详细步骤 阎殿武
ENVI 的图像配准与几何校正工具允许你将图像定位到地理坐标上,并校正它们使其与基图像几何形状相匹配。图像可以用 Rotate/Flip Data 菜单项在配准以前进行旋转。通过使用全分辨率(主图像) 和缩放窗口选择地面控制点(GCPs),来进行图像-图像和图像-地图的配准。基图像和未校正图像的GCPs 的坐标被显示,伴随有特定纠正算法计算的误差项。 纠正用重采样、缩放和平移,多项式函数或德洛内三角测量(RST)实现。支持的重采样方法包括最近邻、双线性和立方体卷积。用 ENVI 的多个动态覆盖能力,对基图像和纠正图像进行比较,可以快速估价配准精度。参阅 ENVI Tutorial Image Georeferencing and Registration 中有关图像配准的详细描述。镶嵌允许多个图像插入到一个用户定义了大小和坐标的基图像中。独立图像或多波段图像文件被输入,且放到图像或地图坐标中或用鼠标确定位置。输出的镶嵌特征可以用图幅显示,且能进行交互式调整。用 ENVI 可以进行虚拟镶嵌,这使你不必将数据的两个副本存到磁盘上。羽化技术能用于混合图像边界,进行无缝镶嵌。镶嵌模板可以被存储,用于其它图像。 ENVI 配准、校正和镶嵌功能可以从 ENVI 的主菜单中的 Register 菜单里选择。 Select Ground Control Points (选择地面控制点) 在菜单 Register 里的Select Ground Control Points菜单项允许交互式选择地面控制点(GCPs),并对单一波段图像或多波段文件纠正。这一工具允许对不同控制点和纠正项进行原形恢复和检验。支持图像-图像和图像-地图的配准。详细步骤参见 ENVI Tutorial Image Georeferencing and Registration 中的图像配准例子。 Image-to-Image Registration (图像-图像的配准) 图像-图像配准需要两幅图像均打开。用每一个显示的缩放窗口选择地面控制点。可以选择Subpixel (小数的)坐标。一旦已经选择了足够用于定义一个纠正多项式的控制点,就能预测纠正图像中的 GCP 位置。GCPs 可以被存储或从文件中恢复,彩色标签与 GCP 标记的顺序可以更改(有关纠正方法的描述,参见“Warping and Resampling Options”部分)。 1 用 Available Bands List 打开基图像和纠正图像文件,并在两个窗口显示它们。 2 一旦两幅图像都已经显示,选择 Register > Select Ground Control Points > Image to Image。 3 出现Image to Image Registration对话框时,在“Base Image:”下面点击需要显示的名字,选择基图像(参照图像)。 4 在 “Warp Image:” 下方点击需要显示的名字,选择被纠正的图像。 5 点击 “OK”, 出现 Ground Control Points Selection 对话框。 ·改变对话框的大小,用鼠标左键点击任何一个角处,拖曳到需要的大小和形状。 参见 ENVI Tutorial “Image Georeferencing and Registration” 中对图像配准的描述。 选择地面控制点 选择地面控制点(GCP 或 Tie Point),通过在缩放窗口定位十字准线,在基图像和纠正图像中选择像元。像元的左上方是整个数字坐标的原点,自这点向右和向下对应的X值和Y值不断增加。在缩放窗口中,可得到的像元fraction与缩放系数是成比例的。例如,缩放系数为4x,像元将被分成4个亚区。缩放系数为10x时,定位可能只有1/10像元。GCP 标记被放在缩放窗口中,显示出亚像元(subpixel) 的位置。 在选择 GCPs 时,亚像元被用于提高准确度。 ·在基础和纠正图像中,选择 GCP 的位置。 1 为每幅图像移动缩放窗口到需要的 GCP 区域。 2. 在缩放窗口的一个特定像元上点击鼠标左键,把光标定位在该像元或像元的一部分上。 注意 从图像窗口,点击 Functions > Pixel Locator 选择像元位置,并提供整数的 GCP 坐标(见第 227 页的 “Pixel Locator”)。 在 Ground Control Points Selection 对话框,被选择处的坐标按 sample、line 顺序分别显示在标签为 “Base X, Y” 和 “Warp X, Y” 文本区中。 在缩放窗口处,定位提供了亚像元坐标,因此对话框中显示浮点坐标值。 3 一旦两幅图像都选择了需要的像元,在 Ground Control Points Selection 对话框中点击“Add Point”,将选择的 GCPs 添加到已经选择的X、Y(样本,行)坐标对列表里。 他们将按基图像(第一个圆括号)、纠正图像(第二个圆括号) 顺序被列出。 当已经选择了四个或更多个 GCPs,对选择的纠正预测的 X、Y 坐标将显示在第三组圆括号中,X、Y 的误差被列表显示在第四组圆括号中,RMS 误差列表显示在最后一组圆括号中。 当 GCPs 已经被添加到列表中时,在两幅图像的缩放窗口里选择的像元(或亚像元)处画一个标记。选择的 GCP 数将出现在标记附近。标记中心(在十字准线下面)显示了实际的 GCP 位置。 4 用同样的方法添加其它的 GCPs 。 使 RMS Error 最小化 在 Ground Control Points Selection 对话框里,选择的 GCPs 数被显示在文本标签 “Pairs” 旁的文本框里。一旦选择了足够的 GCPs,运行一次多项式纠正,像元中的X、Y RMS 误差项按照 sample, line 顺序列表显示在第四组圆括号中。所有点的总 RMS 误差列表显示在标签为“RMS误差”的文本框里。为了最好的配准,试图使 RMS 误差最小化。 用于计算误差的多项式的次数显示在对话框顶部“Degree”的附近,当已经选择了足够的GCPs数时,多项式的次数可以改变。 ·对于一次多项式,你可以选择 RST (Rotation, Scaling, and Translation) 计算误差。点击“YES” 切换按钮,选择 RST。 地面控制点选项 地表控制点选项与 GCP 列表相互作用,包括编辑和更新位置、开启或关闭点、删除所选择的点,以及预测点的位置。这些按钮排列在 Ground Control Points Selection 对话框底部。 ·重新移动缩放窗口到任何一个选择的 GCPs 处,在列表上点击需要的GCP,点击“Goto”。 描述选择的 GCP 轮廓的标记,将被定位在基图像和纠正图像缩放窗口的中心。 ·手动地编辑 GCP 位置: 1 在 Ground Control Points 列表中选择要编辑的 GCP,点击“Edit”。 当前的 X 和 Y 值将出现在 “GCP Edit Point” 对话框里。 2 在合适文本框里,点击并手工输入需要的数值,以编辑基图像和纠正图像的 X 和 Y 值。 3 点击 “OK”,在 Ground Control Points Selection 对话框里改变它们。 如果已经选择了几个 GCPs,将会延迟一段时间,由于 GCPs 需要被重新画上,误差也需重新计算。 ·配准过程中,有选择性地忽视控制点,选择“On/Off”按钮,点击准备忽略的点 不用已经选择的点重新计算 RMS 误差和空间转换。在选择的“OFF”点的左边将出现一个星号,GCP 标记的颜色将发生改变。 再次打开 GCP,点击列表中的点,再次选择 “On/Off” 按钮。 ·从列表中永久性删除一些单个控制点,点击要被删除的 GCP,点击“Delete.” ·交互式改变一些特定 GCP 的位置: 1 在 Ground Control Points Selection 对话框,点击要更新的 GCP。 2 在基图像与纠正图像中重新定位缩放窗口。 3 点击“更新”。 在两个缩放窗口里,以前的 GCP 将被编辑过的 GCP 代替,GCP 的标记位置将被移到当前像元位置处。 ·用由当前的 GCPs 和选择的多项式次数决定的纠正,预测在纠正图像中一个 GCP 的位置 1 在基图像中将缩放窗口定位到一个像元处。 2 点击“预测”。 纠正图像缩放窗口将被移到预测的像元处。 3 在纠正图像中选择正确的像元以使预测值更精确。 4 点击 “Add Point”,输入G CP。 File 下拉菜单 在 Ground Control Points Selection 对话框中,File 菜单包括存储和恢复地面控制点文件选项。 · 退出 Ground Control Points Selection 对话框,选择 File > Cancel. 如果当前的点还没有存储到一个文件中,用户可以选择退出时保存它们。 ·将GCPs存储到一个ASCII输出文件中: 1 选择 File > Save GCPs to ASCII. 2 键入一个扩展名为 .pts 的输出文件,用 “Choose” 按钮选择一个输出文件,点击 “OK” 保存文件。 ·恢复以前存储的GCPs: 1 选择 File > Restore GCPs from ASCII. 2 输入需要的GCP .pts 文件名。 ·存储到 GCPs,误差输出到一个 ASCII 文件: 1 选择 File > Save Points w/RMS to ASCII. 2 输入一个输出文件名,点击 “OK”。 GCPs 下拉菜单 在 Ground Control Points Selection 对话框中的 GCPs 菜单,控制了地面控制点的标签、颜色、顺序,并允许基础和纠正图像翻转。地面控制点用一个十字准线,圆圈和数字被标注在图像上。 ·将关闭/开启标签, 在 GCPs 菜单下,点击 “Label GCPs Off” 或 “Label GCPs On” 旁的切换按钮。 ·选择 GCP 对是否通过它们的索引 “ID#” 或 “Error”,显示在列表中,点击 “Order GCPs by Index” 或 “Order GCPs by Error” 附近的按钮。 索引 ID 顺序是它们被选择的顺序。误差顺序按照从高到低的顺序列出。 ·删除列表中所有 GCPs,选择 GCPs > Clear GCPs. ·改变 GCP 标记标签的颜色: 1 选择 GCPs > Set GCP Colors。 2 出现 GCP Colors 对话框时,用初始标签为 “Red”(与 “GCPs which are “Off”紧邻)的按钮菜单(next to the “GCPs which are “On” label),选择 GCP 标记的颜色。 3 用初始标签为 “Green”(紧邻“GCPs which are “Off”)的下拉菜单,控制 GCPs