智能点焊专家系统实时数据采集与通信
电阻点焊多信息采集系统
“ HY型 焊 材 ”与 H S L A一8 0钢 匹 配 性 较 差 , 而0 6 C u .
[ 1 ] 朱丙坤. H S L A一8 o / l 0 0钢 的焊接 [ J ] . 兵器材料 科学 与工
程, 1 9 9 8 , 2 1 ( 6 ) : 5 9— 6 4 .
N i C r Mo N b钢 使用 的焊 接材 料是 根 据 0 6 C u N i C r M o N b钢 的 自身 特点重 新 开发 的匹配 性较好 的焊接 材料 。
差; 最后 , 计 算 机 和采 集 卡所 采 用 的 硬 件 比较 复 杂 , 而 且 采集 卡 的价格 较 高 , 也是 这种 系统 不 利 的一 方 面 。 为 了克 服上 述 信 息采 集 系 统 的 诸 多 弊病 , 文 中设 计 了一 种新 型 的 采 集 系 统 模 式 : 智 能 终 端 +数 据 处 理
天 津大 学精 密测试技 术及 仪 器 国 家重 点 实验 室 ( 3 0 0 0 7 2 )
摘要
Байду номын сангаас
牛
永
从工业应用的角度 出发 , 考 虑到实 际的运行环境 , 设 计 了以“ 智能 终端 +数 据处理设 备 + 计 算机 ” 为数
据 采集 方式的 、 全新 的电阻点焊 多信 息采 集系统。该系统将 传感 器和数 据采集模 块整 合为智 能终端 , 实 现 了所 采 集 数据 的本 地模 数转换 , 提 高了系统 的抗 干扰性。数据传输采用数据包 的形式 , 每一个包 的开 始为寻址 字节 , 中间 为数据字节 ( 包括命令 ) , 最后为两个 C R C校 验字节 , 提高 了数据传输 的可 靠性 。智能终端 与数据处理 设备通 过 内 部通信 网络连在一起 , 提 高了系统的可扩展性 。数据处 理设 备 与计算机 的通讯 是通过 并 口实 现 的, 解决 了通 信速
基于CAN总线的车身点焊监控系统设计
CS
VDD2
l VDD3 f
W R VSSl ALE V 2 SS VSS 3
趟
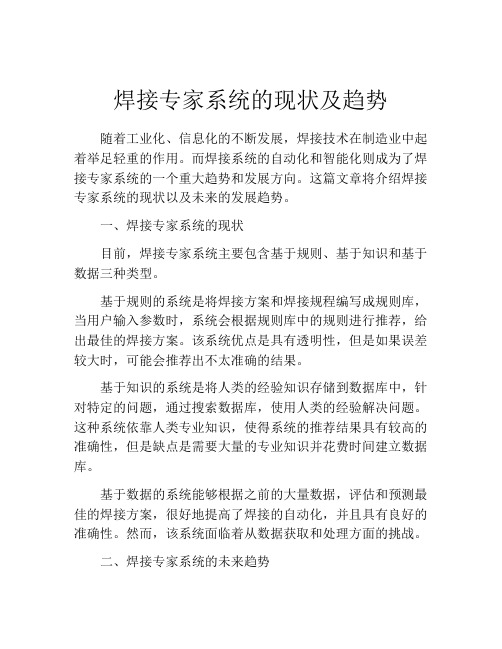
图2 智能节点电路图
[8 第3卷 71 3
第7 期
2 1- ( ) 0 1 7下
l
的相 关 器 件 中 已经 实 现 ,而 应 用 层 协 议 至 今 没 有
一
匐 似
胡德安 ,张 伟 , 陈益平
HU De a , - n ZHANG eiCHEN Yi ig W 。 — n p
( 南昌航空大学 航空制造工程学院 。 昌 3 0 6 ) 南 3 0 3 摘 要 : 介绍 了一种具有C N A 总线通 信功能的汽车 车身点焊控制 器。系统采用C N 场总 线作为通信 A现 传输方 式组建了监控 网络 ,设计 以A 8C 1 T 9 5单片机和C N 线控制器为核心 的通信模块 ,使 A总 点焊控 制器具有通信 功能。设计 了底层 电阻焊 网络控制器 的通信控制程序 ,通信 软件 和上层
线相 连 ,电阻 的限 流 作 用可 保护 8 C 5 2 20免受 过 流
的 冲 击 ,C _ 和 C N_ N A H A L与 地 之 间并 联 了 两 个
sJ 0 0 A1 0 ADO AD 1 AD TX0 TX1
1
— —
8 C2 0 2 5
2
2 GN 卜 t D
RXD c VRE Rs F VCC GND
5
A R D X ; 0
AD4 AD 5 LKo 7 U1
AD AD7 M ODE VDD 1
—
2 RX1
6. K 2
C=
4 K 7
4.K 7
基于无线通信技术的焊接参数采集系统
基金项目:江苏高校技术船舶协同创新中心:基于Wi-Fi技术的焊机智能监控系统研发(编号:HZ20170007);2016年江苏省产 学研项目,船厂管子加工车间智能制造执行系统研究(编号:BY2016073-09)
作者简介:马晓平(1964 — ),男,研究员级高级工程师,研究方向为船舶与海洋结构物制造
马晓平,等:基于无线通信技术的焊接参数采集系统
关研究丄叮,但仍存在一定的不足。在信号采集方 面,现有的采集系统一般是通过直接引用焊机内部 焊接参数显示面板或焊机遥控盒内部的电压 、电流 信号来实现的⑵刃,这种采集方式需对焊机进行相应 的拆机作业,操作不当可能造成焊机相关部件损坏, 影响焊机售后政策,同时随着焊机内部元器件老化 , 焊机内部显示面板的电压、电流信号的准确性会显 著降低。在数据传输方面,现有的传统焊机工作状 态参数采集技术主要以有线通信方式实现,如串行 总线、现场总线、工业以太网等⑷,这种方式的采集 系统灵活性较低,同时由于工厂焊机作业环境一般 比较复杂,若采用有线传输则会带来布线繁琐、线路 故障排查工作量巨大等问题。部分学者研究了无线 通信技术在焊接参数采集方面的应用,这些研究主 要停留在Zigbee和蓝牙等技术上,Zigbee和蓝牙通 信技术虽然有功耗低等优点,但由于其传输距离短、 传输速率低、传输数据量小等原因,在制造业相对复 杂的焊接作业环境下实用性并不高。Wi-Fi技术以
・69・
其传输速度快、覆盖范围广以及接入成本低等优点 在工业领域得到了广泛应用⑹。针对焊机数据采集 系统的研究现状,本文结合焊机数据采集技术与 Wi-Fi技术的优点,开发焊机工作状态参数的无线采 集系统,以实现为工厂焊接作业的高效管理和实时 监控提供技术支持的目的。
机器人行业智能焊接技术方案

行业智能焊接技术方案第一章智能焊接技术概述 (2)1.1 智能焊接技术的发展背景 (2)1.2 智能焊接技术的应用领域 (3)1.2.1 船舶制造 (3)1.2.2 钢结构制造 (3)1.2.3 汽车制造 (3)1.2.4 高速列车制造 (3)1.2.5 航空航天领域 (3)1.2.6 电子制造 (3)第二章智能焊接系统架构 (4)2.1 系统硬件组成 (4)2.2 系统软件架构 (4)2.3 系统集成与通信 (5)第三章智能焊接设计 (5)3.1 本体设计 (5)3.2 控制系统设计 (5)3.3 感知与执行系统设计 (6)第四章焊接工艺参数智能优化 (6)4.1 焊接参数检测与采集 (6)4.1.1 焊接参数检测方法 (6)4.1.2 焊接参数采集设备 (7)4.1.3 数据处理与分析 (7)4.2 焊接参数智能优化方法 (7)4.2.1 遗传算法 (7)4.2.2 粒子群算法 (7)4.2.3 神经网络 (7)4.2.4 深度学习 (7)4.3 焊接参数优化结果评估 (7)4.3.1 评估指标 (8)4.3.2 评估方法 (8)4.3.3 实际应用效果 (8)第五章智能焊接路径规划 (8)5.1 焊接路径方法 (8)5.2 路径优化算法 (8)5.3 路径规划与执行 (9)第六章智能焊接视觉检测技术 (9)6.1 视觉系统硬件设计 (9)6.1.1 硬件构成 (9)6.1.2 设计要点 (10)6.2 视觉图像处理与分析 (10)6.2.1 图像预处理 (10)6.2.2 特征提取 (10)6.2.3 目标识别 (10)6.3 视觉检测与跟踪 (10)6.3.1 检测算法 (11)6.3.2 跟踪算法 (11)第七章智能焊接缺陷识别与处理 (11)7.1 缺陷识别算法 (11)7.1.1 算法概述 (11)7.1.2 图像处理算法 (11)7.1.3 深度学习算法 (12)7.1.4 信号处理算法 (12)7.2 缺陷处理策略 (12)7.2.1 缺陷处理方法 (12)7.2.2 缺陷处理流程 (12)7.3 缺陷识别与处理效果评估 (12)7.3.1 评估指标 (13)7.3.2 评估方法 (13)第八章智能焊接质量监控与评估 (13)8.1 质量监控方法 (13)8.2 质量评估指标 (13)8.3 质量监控与评估系统设计 (14)第九章智能焊接技术在典型应用领域的应用 (14)9.1 船舶制造领域 (15)9.2 汽车制造领域 (15)9.3 钢结构制造领域 (15)第十章智能焊接技术的发展趋势与挑战 (16)10.1 发展趋势 (16)10.2 面临的挑战 (16)10.3 发展策略与建议 (17)第一章智能焊接技术概述1.1 智能焊接技术的发展背景科技的不断进步,行业的应用范围日益广泛。
焊接机器人数据采集与管控系统

焊接机器人数据采集与管控系统发布时间:2022-09-12T00:46:51.546Z 来源:《科学与技术》2022年5月9期作者:孙理吴延成高向义姜荣[导读] 随着数字化焊接机器人进入工厂,采用传统人工监督的方式逐渐不能满足对设备的监控管理需求。
孙理吴延成高向义姜荣中车青岛四方机车车辆股份有限公司山东省青岛市 266000摘要:随着数字化焊接机器人进入工厂,采用传统人工监督的方式逐渐不能满足对设备的监控管理需求。
一些采用“多机器人厂商、中小生产规模”为生产模式的企业,需要一个低成本、高适配性的平台,统一管理现场各种焊接机器人。
针对上述需求设计了机器人管控系统,系统可分为通信模块和设备管控模块。
关键词:焊接;机器人;数据采集;管控引言焊接机器人出现,不仅提升了焊接的精度及效能,也使焊接中对人体产生危害的电弧、烟尘得到了更好的控制。
通过分析焊接机器人应用的主要优势,了解焊接机器人技术的主要应用,为未来焊接机器人技术的应用与拓展,打下坚实的基础,更好的服务于我国的社会建设事业。
1焊接机器人数据采集与管控系统架构焊接机器人数据采集与管控系统由硬件和软件两部分组成,硬件主要包括现场的各个品牌的工业机器人、焊机、PLC、工控机和变位机等焊接系统相关设备,以及支持现场数据通信的各个采集计算机。
软件主要包括数据通信系统和机器人管控系统,实现数据通信、设备基本信息录入、历史生产数据回溯、实时状态监控、设备定期维护和通信模块更新等功能。
该系统的数据通信模块从不同品牌的焊接机器人通信接口不同等实际问题出发,针对不同的焊接工艺方式,首先提取出不同焊接工艺所共有的数据,例如焊接电流,并制定一份基础的传输协议。
该协议预留相应的数据位,用于存放不同品牌机器人或不同焊接方式特有的数据,例如激光焊接的离焦量。
将常用的机器人通信接口,例如OPCUA等,每个接口开发唯一的数据通信子程序,即所有采用OPCUA通信接口的机器人,采用相同的通信子程序。
焊接专家系统的现状及趋势
焊接专家系统的现状及趋势随着工业化、信息化的不断发展,焊接技术在制造业中起着举足轻重的作用。
而焊接系统的自动化和智能化则成为了焊接专家系统的一个重大趋势和发展方向。
这篇文章将介绍焊接专家系统的现状以及未来的发展趋势。
一、焊接专家系统的现状目前,焊接专家系统主要包含基于规则、基于知识和基于数据三种类型。
基于规则的系统是将焊接方案和焊接规程编写成规则库,当用户输入参数时,系统会根据规则库中的规则进行推荐,给出最佳的焊接方案。
该系统优点是具有透明性,但是如果误差较大时,可能会推荐出不太准确的结果。
基于知识的系统是将人类的经验知识存储到数据库中,针对特定的问题,通过搜索数据库,使用人类的经验解决问题。
这种系统依靠人类专业知识,使得系统的推荐结果具有较高的准确性,但是缺点是需要大量的专业知识并花费时间建立数据库。
基于数据的系统能够根据之前的大量数据,评估和预测最佳的焊接方案,很好地提高了焊接的自动化,并且具有良好的准确性。
然而,该系统面临着从数据获取和处理方面的挑战。
二、焊接专家系统的未来趋势随着深度学习技术的不断发展,基于数据的系统在处理大数据方面已经显示出了良好的效果。
未来,深度学习技术将会为焊接专家系统带来更多的优化和改进。
未来的焊接专家系统将更注重数据驱动,在数据获取方面将会对人工智能技术以及物联网技术进行深入研究。
通过实时监测焊接过程中的数据,系统能够自主识别焊接问题并快速做出相应的决策和调整,从而实现更加智能化的生产流程。
在焊接技术中,焊接材料的选择和焊接工艺是影响焊接质量的关键因素。
焊接专家系统未来将会对焊接工艺的自动化控制、焊接材料和设备的评估以及焊接状态的监测等方面进行全面优化和提升。
通过深度学习技术和先进的模型预测算法,将实现智能化、高效化的焊接系统。
此外,近年来的工业4.0将网络、数据、物联网和先进制造技术紧密地结合在一起,未来的焊接专家系统将更加关注制造业的数字化转型,从焊接机器人的智能控制到设备状态的实时监控,甚至是自适应的生产配送系统,都将被不断优化和改进。
基于人工智能的焊接质量控制中焊缝缺陷智能识别
基于人工智能的焊接质量控制中焊缝缺陷智能识别在基于人工智能的焊接质量控制中,焊缝缺陷的智能识别具有重要的作用。
本文将探讨利用人工智能技术实现焊缝缺陷智能识别的方法和应用。
一、引言随着焊接技术在工业领域的广泛应用,焊缝质量的控制变得尤为重要。
传统的焊缝质量检测方法通常依靠人工目测,劳动密集且效率低下。
而基于人工智能的焊接质量控制可以通过机器学习和图像处理等技术,实现对焊缝缺陷的智能识别和自动检测,提高焊接质量的可靠性和效率。
二、人工智能在焊缝缺陷识别中的应用1. 数据采集和预处理人工智能算法需要足够的数据样本进行训练才能准确地识别焊缝缺陷。
因此,首先需要对焊接过程中的焊缝图像进行采集和处理。
采集到的图像可以包含不同角度、光照等条件下的焊缝情况,以便增加算法的鲁棒性。
2. 特征提取和选择对于焊缝图像,需要从中提取合适的特征来进行后续的分类和判别。
通常可以使用计算机视觉技术对焊缝图像进行边缘检测、灰度化、二值化等处理,然后通过特征提取算法如SIFT、HOG等,提取出具有代表性的特征。
3. 模型训练和优化基于采集到的焊缝图像和提取的特征,可以使用机器学习算法如支持向量机(SVM)、卷积神经网络(CNN)等进行模型的训练和优化。
训练过程可以使用已标注的焊缝图像进行有监督学习,使得模型能够准确地分类和识别焊缝缺陷。
4. 智能识别和自动检测经过训练和优化后的模型可以应用于实际的焊缝图像检测中。
通过输入待检测的焊缝图像,模型可以自动识别出其中的缺陷情况,并进行分类和定位。
智能识别的结果可以直接用于焊接质量的评估和控制,提高焊接工艺的稳定性和可靠性。
三、基于人工智能的焊缝缺陷智能识别的应用案例1. 汽车制造业在汽车制造业中,焊接被广泛应用于车身和底盘等零部件的连接。
利用人工智能的焊缝缺陷智能识别技术,可以快速、准确地检测汽车焊缝中的缺陷,如气孔、裂纹等,确保焊接质量符合标准要求。
2. 航空航天工业航空航天工业对焊接质量的要求十分严格,焊缝缺陷可能会导致飞行器事故。
金属焊接中的智能化焊接过程实时监控技术
金属焊接中的智能化焊接过程实时监控技术在金属焊接领域,智能化焊接过程实时监控技术是一项具有重要意义和巨大潜力的技术。
通过实时监控焊接过程的关键参数,如温度、电压、电流、电弧形状等,可以提供可靠的数据支持和智能化控制,从而实现焊接质量的提升和生产效率的提高。
一、智能化焊接过程实时监控技术的重要性在金属焊接过程中,焊接质量的稳定性和一致性是至关重要的。
而传统的焊接过程监控手段主要依靠人工操作和经验判断,存在数据不准确、监控效率低等问题。
而智能化焊接过程实时监控技术的出现,可以有效解决这些问题,进一步提高焊接的稳定性和一致性。
二、智能化焊接过程实时监控技术的原理和方法智能化焊接过程实时监控技术主要通过传感器获取焊接过程中的关键参数数据,并通过数据分析和处理实现对焊接过程的实时监控。
常用的监控参数包括焊缝温度、焊机电压、焊机电流、焊接速度等。
这些参数的变化可以反映焊接质量的好坏,并提供实时数据支持进行优化控制。
三、智能化焊接过程实时监控技术的应用实例智能化焊接过程实时监控技术已经在金属焊接领域得到广泛应用。
例如,在航空航天领域,焊接质量的稳定性和可靠性对于飞行器的安全性至关重要。
通过实时监控焊接过程的关键参数,可以及时发现焊接缺陷,并采取相应的措施进行修复,提高焊接质量和可靠性。
四、智能化焊接过程实时监控技术的发展趋势随着物联网和人工智能技术的发展,智能化焊接过程实时监控技术将迎来更大的发展空间。
未来,将更加智能化地实现焊接过程的自动化控制和优化。
例如,通过无线传感器网络实现远程监控和控制,通过人工智能算法实现自动识别焊接缺陷和提供优化建议。
总结:智能化焊接过程实时监控技术在金属焊接领域具有重要意义和广阔的应用前景。
通过实时监控关键参数,提供数据支持和智能化控制,可以提高焊接质量和生产效率,降低成本和风险。
随着技术的不断发展,智能化焊接过程实时监控技术将进一步推动金属焊接技术的发展和应用。
焊接机器人智能寻位技术研究
焊接机器人智能寻位技术研究摘要:本文研究了焊接机器人智能寻位技术,重点探讨了获取焊接起弧点的位置和方位、Def Frame定义工件坐标系以及机器人程序流程等方面。
针对获取焊接起弧点的位置和方位,本文讨论了传感器选择和安装、数据采集和处理等问题;针对Def Frame定义工件坐标系,本文探讨了工件坐标系的确定方法和转换方法;针对机器人程序流程,本文提出了程序设计方法和技巧以及程序优化和调试方法。
最后,通过应用实例,验证了本文所提出的技术在实际焊接生产中的可行性和有效性。
关键词:焊接机器人;智能寻位技术;工件坐标系;程序流程;应用实例引言随着工业自动化程度的不断提高,焊接机器人已经成为现代焊接生产的重要设备。
然而,由于焊接工件的形状、尺寸、位置等因素的不同,机器人焊接时常常存在着无法准确定位的问题,导致焊接质量不稳定。
因此,如何实现焊接机器人的智能寻位,对于提高焊接生产的效率和质量具有重要意义。
1获取起弧点的位置和方位1.1传感器选择和安装首先,在传感器的选择方面,需要考虑到测量的精度和灵敏度。
精度指的是传感器的测量误差,而灵敏度指的是传感器的检测能力。
对于焊接机器人而言,精度和灵敏度都需要达到一定的要求,才能保证测量结果的准确性和稳定性。
此外,还需要考虑传感器的量程和适用范围,确保能够满足焊接任务的需求。
其次,在传感器的安装方面,需要考虑到位置和角度的选择。
传感器的安装位置应该尽可能接近焊接起弧点,以最大程度地保证测量精度。
同时,还需要考虑到传感器的朝向,以确保测量方向与焊接任务一致。
安装位置和角度的选择需要进行实地勘察和模拟仿真,并根据实际情况进行优化。
1.2数据采集和处理在焊接机器人智能寻位技术中,数据采集和处理是关键环节之一。
数据采集指的是通过传感器获取工件的实时位置和姿态信息,数据处理则是对采集到的数据进行处理和分析,从而实现对焊接起弧点位置和方位的精确定位。
针对数据采集,目前常用的传感器主要包括激光三角测量传感器、视觉传感器、编码器等。
人工智能在焊接的应用
人工智能在焊接的应用在现代工业生产中,焊接技术是连接材料的重要手段之一,它广泛应用于建筑、汽车、航空、造船等多个领域。
随着人工智能技术的发展,人工智能在焊接领域的应用正逐步改变这一传统工艺,使其变得更加高效、精准和智能。
首先,人工智能可以通过机器学习算法优化焊接参数。
传统的焊接过程中,参数设置往往依赖于操作工人的经验,而人工智能可以通过分析大量的焊接数据,学习并预测最佳的焊接参数,如电流、电压、焊接速度等,从而提高焊接质量和效率。
其次,人工智能在焊接过程中可以实现实时监控和质量控制。
通过集成视觉识别系统,人工智能可以实时检测焊接过程中的缺陷,如焊缝不连续、气孔、裂纹等,一旦发现问题,系统可以自动调整焊接参数或通知操作人员进行干预,从而减少废品率,提高产品质量。
再者,人工智能可以提高焊接机器人的灵活性和适应性。
传统的焊接机器人往往只能按照预设的路径进行焊接,而人工智能可以使机器人具备自我学习和适应新环境的能力。
通过深度学习,焊接机器人可以识别不同的焊接场景,并自动规划最佳焊接路径,甚至在复杂或不规则的工件上进行精确焊接。
最后,人工智能在焊接领域的应用还有助于提升安全性。
焊接过程中产生的高温、强光和有害气体对操作人员的健康构成威胁。
通过人工智能技术,可以实现焊接过程的自动化和远程控制,减少人员直接接触焊接现场,从而降低职业风险。
综上所述,人工智能在焊接领域的应用不仅提高了生产效率和产品质量,还增强了操作的灵活性和安全性。
随着技术的不断进步,未来人工智能将在焊接领域扮演更加重要的角色,推动焊接技术向智能化、自动化的方向发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第3卷 第4 2 期
2 0 年 4月 0" 2
雹晖拽
El ti chi a h ne  ̄crcW t ng M c i
V 】 2 No 4 0 . . 3 Ap o 2 L2 o
胡德安 , 陈鹏 展 , 唐 柏 , 益 平 李 陈
一
与制造 控制 中应具有较 强 的实时性 。 因此 , 究 点 焊 研 过 程 动 态 参 数 的实 时 采 集 与 通 信 , 于 构 造基 于模 糊 对
,
随 着 人 工 智 能 技 术 的 迅 猛 发 展 , 家 系 统 日益 显 专
示 出 巨 大 的应 用 价 值 , 由 于 焊 接 生 产 中许 多 问 题 的
( 昌航 空_ 业 学 院 材料 科 学 与 工程 系, 西 南 昌 30 3 ) 南 T - 江 3 0 4
Re ltm e a a e e e s i d c m m u c to f r a -i p r m t r m a urng an o nia i n o it l g n x e t y tm n p t n e l e t e p r s se i i s o we d n lig
收 稿 日期 :0 【— 5 20 一 2 0 L 基 金 项 目 : 西 省材 料 科学 与 工 程 研 究 中心 开放基 盘资 江
助 ( CLO2 ) 06
1 工 作 原 理
电阻焊 是一种 高效率 的焊 接方 法 ,其 焊接 电流 大 ,焊接时 间短 ,干扰因素 多并且交 互影 响 ,具 有 焊 接过程 的 瞬时性 及 熔核 形成 的不 可见性 等 特点 , 是一 种 比较复 杂的动态 热过程 。 由于焊点质 量与各 参 数 在 焊 接 过 程 中发 生 的 变 化 密 切 相 关 ,故 仅 在 焊 接 过 程 结 束 后 采 用 抽 检 法 评 估 焊 接 质 量 , 既 浪 费 大 量 的人 力 和 物 力 , 不 能 完 全 保 证 焊 点 质 量 。 计 点 又 设 焊过 程参 数的实时采 集 和通信 系统 , 以全 面、 可 准确
a d s f r s a a  ̄e . 1e e p r n a rs l s o h tte v r t n o ∞ s ig p rme r n s o w l ig c / b a u e n o wae i n l d 1 】 x e i tl eu t h ws t a h a i i f r e s a a t s i p t ed n a1 e me s rd t me ao e
aerl b s go t, yt cua 由 yui h ssm,adcnb de om liedt aeo o w li xet y et w i (r b sdt b i n f e e n a addt a ̄ a bs f s t e n epr s ̄ n h h -t ue ul e m a p d g h c a e o d
itl g n x ets s m fs o edn ai o n e i e te p r y t o p tw lig r t l e d q a t v la g o e ig s o o n u ly e au l f w l n p t n l e i n i d i
Ke ywo d :so w l n ep r ss m :aa e rm a u n c m u i t n rs p t ed g:x et yt i e prm t e s ig:o m nc i e r ao
专 家 系 统 是 人 工 智 能 研 究 中 最 活 跃 的 领 域 之
HU —n , Dea CHEN e g z a , n o a CHEN — mg P n oh n LITa gb i, Yip
( eat e to Mae a S ine a d n n eig N nh n ntue o eo a t a T c n l y N n h n D p r n f t il c c n E N er , a c a g Is tt fA rn ui l eh o g , a ca g m r e n i c o-
控 制 (C 人 工神 经 网 络( N ) 电阻焊 智 能专 家 F) A N的
系 统 , 现 电 阻 焊 制 造 单 元 的 智 能 化 、 成 化 、 络 实 集 网 化 , 最终嵌 入企业综合 集成具有 重要的意义I 。 并 。 。
解 决仍然依赖 实 际经验 ,故在焊接领 域特 别适合 开 发专 家系统 。 在现 代焊接 企业信息 网络集成 系统 中 , 专 家 系 统 是 过 程 监 控 层 的重 要 组 成 部 分 。在 企 业 内 部局域 网集成环 境 中 ,焊接专 家系统 首先应 该具 有 对底层制 造单元 直接控 制类数 据的传输 能力 、对制 造 过程 协调控制 和管理 数据 的传 输能力 和对工 程设 计 部分技 术类数据 的传输 能力 等 ,在产 品丁艺设 计
3o 3 3 0 4. C i a) hn Ab t c : h s a tT e r i fr a t m  ̄ rm a ui n e mui t n i s w l n imd c l e d s n o a w r p o e l me p m t e s n a d c k — i o e rg m nc i ao n e ig n ue d l d h ei fh r a g d e