【CN109597145A】基于图像识别的摄像式能见度检测方法和装置【专利】
一种检测方法发明专利
一种检测方法发明专利背景介绍在现代科技高度发达的社会中,各种检测方法在日常生活和工业生产中起到至关重要的作用。
然而,传统的检测方法通常过于复杂、耗时耗力,且结果不够准确。
因此,我们迫切需要一种高效、准确的检测方法来满足如今日益增加的检测需求。
发明内容本发明提供了一种新型的检测方法,旨在改善传统方法的不足之处。
这种方法基于先进的光学技术,并运用了人工智能算法进行数据分析处理,可以快速、准确地检测目标物质的特定参数。
该方法主要包括以下步骤:1. 数据采集:使用特定的光学设备对目标进行扫描或拍摄,获得一系列图像或光谱数据。
2. 数据预处理:对采集到的数据进行预处理,包括降噪、去除无关信息以及图像增强等。
3. 特征提取:应用人工智能算法,提取与目标参数相关的特征信息,如形状、色彩、纹理等。
4. 模式识别:利用预先训练好的模型,对提取到的特征进行分类、匹配,判断目标是否符合特定参数要求。
5. 结果输出:根据识别结果,输出目标物质的参数信息,并给出相应的判断或建议。
创新之处相较于传统的检测方法,本发明具有以下创新之处:1. 高效准确:利用先进的光学技术,能够快速获取大量数据,并通过人工智能算法对数据进行处理和分析,大幅提高了检测的准确性和效率。
2. 智能化处理:采用人工智能算法进行特征提取和模式识别,不仅能够识别目标物质的特定参数,还能够适应不同情境下的检测需求,实现智能化的数据分析和处理。
3. 非接触式检测:所采用的光学设备能够远距离、非接触地进行扫描或拍摄,无需与目标物质直接接触,更加安全、卫生。
4. 多领域应用:本发明可广泛应用于各个领域,如食品安全检测、医药品质监控、环境污染检测等,满足不同领域的特定检测需求。
实施方式本发明的实施方式包括但不限于以下两种:1. 硬件设备实施方式:通过研发专门的光学设备,包括激光扫描仪、高分辨率相机等,用于获取目标物质的光谱或图像数据。
2. 软件应用实施方式:开发相应的软件应用程序,包括数据预处理模块、特征提取模块、模型训练模块等,用于对采集到的数据进行处理和分析。
【CN109903174A】一种基于移动终端摄像的保险单录入系统及方法【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910222268.2(22)申请日 2019.03.22(71)申请人 成都晟堃科技有限责任公司地址 610000 四川省成都市(四川)自由贸易试验区成都高新区吉泰路666号3栋13层4号(72)发明人 王健荣 曹光旺 金鑫 李小川 (51)Int.Cl.G06Q 40/08(2012.01)G06K 9/20(2006.01)(54)发明名称一种基于移动终端摄像的保险单录入系统及方法(57)摘要本发明公开了一种基于移动终端摄像的保险单录入系统及方法,云端服务器分别与移动终端和电脑终端连通,移动终端包含摄像头和保险单图片特征检测模块,摄像头对保险单进行摄像并抓取帧图像,保险单图片特征检测模块对帧图像进行检测,云端服务器包含保险单信息解析模块,云端服务器用于接收通过检测的保险单图片,保险单信息解析模块将保险单图片中的文字信息解析并存储为保险单数据,电脑终端或移动终端用于访问云端服务器存储的保险单数据。
平均速度为20秒/份,相较于人工录入平均约10分钟/份,大大提高了录入效率,且基于保险单图片特征检测模块,识别出可能为保险的图片,大大提高云端服务器端对保险单信息的解析精确率。
权利要求书3页 说明书4页 附图3页CN 109903174 A 2019.06.18C N 109903174A权 利 要 求 书1/3页CN 109903174 A1.一种基于移动终端摄像的保险单录入系统,其特征是:包括移动终端(10)、云端服务器(20)和电脑终端(30),所述云端服务器(20)分别与所述移动终端(10)和所述电脑终端(30)连通,所述移动终端(10)包含摄像头和保险单图片特征检测模块,所述摄像头对保险单进行摄像并抓取帧图像,所述保险单图片特征检测模块对所述帧图像进行检测,所述云端服务器(20)包含保险单信息解析模块,所述云端服务器(20)用于接收通过检测的保险单图片,所述保险单信息解析模块将所述保险单图片中的文字信息解析并存储为保险单数据,所述电脑终端(30)或所述移动终端(10)用于访问所述云端服务器(20)存储的所述保险单数据。
【CN109800616A】一种基于图像特征的二维码定位识别系统【专利】

5 .根据权利要求4所述的一种基于图像特征的二维码定位识别系统,其特征在于,颜色 空间统一采用灰度空间进行归一化,
[0023]
[0024]
[0025] 将图像分成若干个小的细胞单元Cell,每个Cell为8x8像素大小,将Cell的梯度方
向沿 到 分成9个方向区间,对cell内每个像素用梯度方向在直方图中进行加权投影,
梯度大小作为投影权值 ,得到Cell的梯度方向直方图 ,也就是该局部图像区域cell对应的 一个9维特征向量编码; [0026] 把细胞单元组合成大的块,块内归一化梯度直方图,取每个block包含2x2个Cell, 将所有Cell的特征向量串联起来再进行归一化便得到该block的HOG特征。 [0027] 进一步的 ,所述二维码检测识别系统 ,包括图片载入模块,用于载入待检测的图 片 ;图 片调整模块 ,用于对待检 测图 像进行尺度缩放 ;还包括裁剪模块 ,该裁剪模块根据图 片调整模块计算的图 像尺寸 和窗口 个数进行图 像裁剪 ;所述待检 测图 像特征计算模块 ,用 于根据上述预 训练图 像特征计算系统 相同的方式 ,计算出待检测图 像的图 像特征 ,对待检 测图像的每一层上采用固定大小的检测窗口按设定好的滑动步长进行滑动遍历,每个检测 窗口计算图像特征并送入已 训练完成的SVM分类器中 ,判断该窗口是否为二维码目标 ,是则 存下该目标区域,否则继续滑动。 [0028] 本发明的有益效果为:本发明通过预训练技术,可以识别任意包含二维码的图片, 而不论图片的拍摄大小、位置、角度、光照情况如何,整个识别系统高效、快速、准确。
【CN109784258A】一种基于多尺度特征切割与融合的行人重识别方法【专利】

度的特征图 ,记作
其中, 大小为32*16*512, 大小为16*8*1024, 大小
为8*4*2048。 4 .根据权利要求1所述的一种基于多尺度特征切割与融合的行人重识别方法,其特征
6 .根据权利要求1所述的一种基于多尺度特征切割与融合的行人重识别方法,其特征 在于,所述的步骤S3 .1中局部分支与全局分支共享ResNet50除最后一个block的参数,将最 后一个block的歩长改为1使得最后一层的特征图 大小为16*8*2048,相比全局分支的最
后一层特征图 扩大4倍。 7 .根据权利要求1所述的一种基于多尺度特征切割与融合的行人重识别方法,其特征
(74)专利代理机构 广州市华学知识产权代理有 限公司 44245
代理人 李斌
(51)Int .Cl . G06K 9/00(2006 .01) G06K 9/62(2006 .01)
( 54 )发明 名称 一种基于多尺度特征切割与融合的行人重
识别方法 ( 57 )摘要
本发明提供了一种基于多尺度特征切割与 融合的行人重识别方法,具体提供一种基于多尺 度深度特征切割与融合的行人重识别网络训练 及基于该网络的行人重识别方法 ,通过多尺度全 局描述子提取和局部描述子提取,进行行人重识 别。全局描述子的提取是对深度网络不同层的特 征图进行平均池化和特征融合,局部描述子的提 取是将深度网络最深层特征图水平分割成数块, 分别提取各块特征图对应的局部描述子。训练中 以 最小化 平滑交叉 熵代价函数以 及难样本采样 三元组代价函数为目的训练网络参数。采用本发 明技术方案,能够解决行人重识别中由于行人姿 势变化、摄像头色偏等因素带来的特征不匹配问 题 ,还能 消除 背景带来的 影响 ,以 提高行人重识 别的鲁棒性和精度。
【CN110084957A】一种终端检测的方法、装置、便携式终端及存储介质【专利】
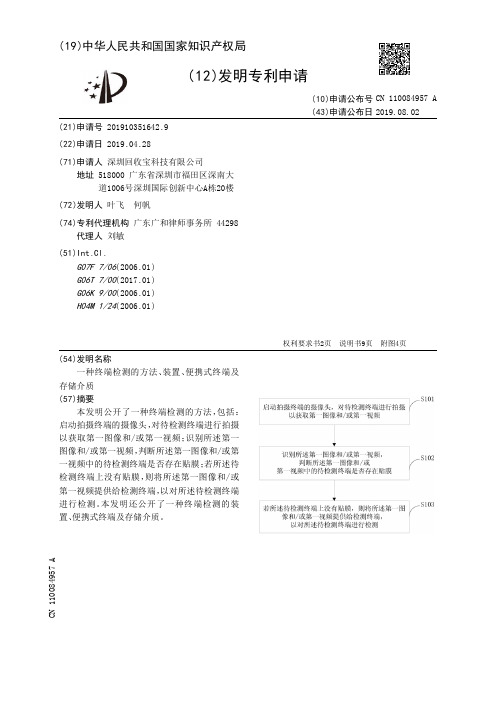
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910351642.9(22)申请日 2019.04.28(71)申请人 深圳回收宝科技有限公司地址 518000 广东省深圳市福田区深南大道1006号深圳国际创新中心A栋20楼(72)发明人 叶飞 何帆 (74)专利代理机构 广东广和律师事务所 44298代理人 刘敏(51)Int.Cl.G07F 7/06(2006.01)G06T 7/00(2017.01)G06K 9/00(2006.01)H04M 1/24(2006.01)(54)发明名称一种终端检测的方法、装置、便携式终端及存储介质(57)摘要本发明公开了一种终端检测的方法,包括:启动拍摄终端的摄像头,对待检测终端进行拍摄以获取第一图像和/或第一视频;识别所述第一图像和/或第一视频,判断所述第一图像和/或第一视频中的待检测终端是否存在贴膜;若所述待检测终端上没有贴膜,则将所述第一图像和/或第一视频提供给检测终端,以对所述待检测终端进行检测。
本发明还公开了一种终端检测的装置、便携式终端及存储介质。
权利要求书2页 说明书9页 附图4页CN 110084957 A 2019.08.02C N 110084957A权 利 要 求 书1/2页CN 110084957 A1.一种终端检测的方法,其特征在于,包括:启动拍摄终端的摄像头,对待检测终端进行拍摄以获取第一图像和/或第一视频;识别所述第一图像和/或第一视频,判断所述第一图像和/或第一视频中的待检测终端是否存在贴膜;若所述待检测终端上没有贴膜,则将所述第一图像和/或第一视频提供给检测终端,以对所述待检测终端进行检测。
2.如权利要求1所述的方法,其特征在于,所述方法还包括:若所述待检测终端上存在贴膜,则提示用户重新拍摄所述待检测终端的第一图像和/或第一视频。
3.根据权利要求2所述的终端检测方法,其特征在于,所述提示用户重新拍摄所述待检测终端的图像,具体包括:生成提示图标和/或文本信息和/或提示语音,以指示用户撕掉所述待检测终端屏幕上的贴膜后再进行拍摄。
【CN109859278A】车载相机系统相机外参的标定方法及标定系统【专利】

;
其中, 为当前帧图像信息中的第i次修正时的滚动角角度,h为相机高度,L1 .x为 点L1的横向坐标值,R1 .x为点R1的横向坐标值,N1 .x为点N1的横向坐标值。 [0015] 可选的,所述修正阈值为0 .01 °~0 .1 °之间的任一值,进一步优选为0 .05 °。 [0016] 另外,本发明还提供一种车载相机外参标定系统,其特征在于,包括
在当前帧图像信息中选取在左车道线上的任意一点L1、右车道线上的任意一点R1以及 邻近车道线的任意一点N1,并计算各点的世界坐标;
采用如下公式进行修正 当邻近车道线为左邻近车道时,其滚动角修正公式如下:
当邻近车道线为右邻近车道时,其滚动角修正公式如下:
5
CN 109859278 A
说 明 书
3/9 页
( 19 )中华人民 共和国国家知识产权局
( 12 )发明专利申请
(21)申请号 201910070089 )申请人 惠州市德赛西威汽车电子股份有限 公司
地址 516006 广东省惠州市仲恺高新区和 畅五路西103号
(72)发明人 李方 刘杨 卢金波 胡坤福
CN 109859278 A
说 明 书
1/9 页
车载相机系统相机外参的标定方法及标定系统
技术领域 [0001] 本申请涉及车载相机系统数据处理领域,特别涉及一种车载相机系统相机外参的 标定方法及标定系统。
背景技术 [0002] 相机标定在二维图像中恢复物体的三维信息的过程中至关重要,在相机的成像几 何模型中空间点与图像平面上像点之间存在对应关系,这个对应关系是由摄像机参数决定 的。通常摄像机包含相机内参与外参,内参为摄像机自身的参数,外参为摄像机安装位置上 如俯仰 角、旋转 角和偏航 角等。从广义上来分 ,目前可将相机标定分为两类 ,即传统的 摄像 机标定法与摄像机自标定法。 [0003] 1、传统的摄像机标定法在相机静止环境下,相机标定通常通过传统的定标方法进 行标定,这一过程需要利用标定板在图像平面的成像位置,计算出相机的内外参数。这种方 法的缺点是只能用于相机相对静止的环境,在许多应用场景中难以实现。例如,在车载相机 系统中 ,利用视觉实现目标位置估计 ,由于车辆在行驶过程由于道路原因中会产生振动 ,从 而会导致相机外参发生变化 ,进而影响摄像机坐标系与世界坐标系的转换矩阵 ,此时如果 相机没有实现实时标定 ,会进一步影响目 标距离位置的 准 确性 ,难以 安全有效地进行导航 决策。 [0004] 2、摄像机自标定法,该方法无需利用标定板进行标定。目前动态标定的方法有利 用车辆与平行线的距离与消失点进行标定的方法,需要的条件较多。只适用于特定道路,通 用性较低。 [0005] 因此,需要提出一种可以准确计算相机外参角度的标定方法,以获得载摄像机实 时、准确的外参角度。 [0006] 申请内容
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910113918.X
(22)申请日 2019.02.14
(71)申请人 重庆融创视讯科技有限公司
地址 404300 重庆市忠县移民生态工业园
区
(72)发明人 李永 甘志 杨宁
(51)Int.Cl.
G01W 1/06(2006.01)
(54)发明名称
基于图像识别的摄像式能见度检测方法和
装置
(57)摘要
本发明涉及气象监测技术领域,且公开了一
种基于图像识别的摄像式能见度检测方法和装
置,所述装置包括系统主控CPU,所述系统主控
CPU的输入端电连接有探测模块,所述系统主控
CPU的输入端电连接有3D阵列COMS传感设备,所
述3D阵列COMS传感设备的输入端点连接有摄像
模块,
本发明还提供一种基于图像识别的摄像式能见度检测方法,通过3D阵列COMS传感设备的启
动,使摄像模块进行图像拍摄,拍摄后将图片进
行转换,转换后通系统主CPU主控进行测算,后将
数据显示出。
权利要求书1页 说明书4页 附图4页CN 109597145 A 2019.04.09
C N 109597145
A
权 利 要 求 书1/1页CN 109597145 A
1.一种基于图像识别的摄像式能见度检测装置,包括系统主控CPU,所述系统主控CPU 的输入端电连接有探测模块,所述系统主控CPU的输入端电连接有3D阵列COMS传感设备,所述3D阵列COMS传感设备的输入端点连接有摄像模块。
2.如权利要求1所述的基于图像识别的摄像式能见度检测装置,其特征在于:所述探测模块包括温度传感器、湿度传感器、风力传感器、雨量传感器、压力传感器和风向传感器。
3.如权利要求1所述的基于图像识别的摄像式能见度检测装置,其特征在于:所述摄像模块包括近视点立体影像、中视点立体影像和远视点立体影像。
4.如权利要求3所述的基于图像识别的摄像式能见度检测装置,其特征在于:所述近视点立体影像、中视点立体影像和远视点立体影像间夹角小于10°。
5.一种基于图像识别的摄像式能见度检测方法,包括以下步骤:
S1,3D阵列COMS传感设备初始化;
S2,拍摄一张图像,按照JPK格式存放到EEPROM中;
S3,系统主CPU主控读取EEPROM中的JPG图片;
S4,系统主CPU主控将图片通过串口传导笔记本或电脑上;
S5,调试人员在图片中确定3组坐标(近、中、远)视点坐标,并输入到系统控制CPU;
S6,系统主控CPU把三组坐标写到EEPROM指定地址中;
S7,3D阵列COMS传感设备把3组坐标处测量到的亮度值写到EEPROM指定地址中;
S8,系统主控读取亮度值计算出能见度。
2。