各种电气控制原理图和实物接线图及直流电动机其线圈绕线方法
电气图及电气控制基本电路

电气控制与可编程序控制器
第二章 电气图及电气控制基本控制电路
字体:汉字、字母及数字,书写端正、清楚,排列整齐,间距均匀。
汉字推荐用长仿宋简化汉字字体、斜体(右倾与水平线成75°角)等。 字母、数字用直体。 字体大小视幅面大小而定。 字高:20mm、14mm、10mm、7mm、5mm、3.5mm、2.5mm等。 字宽为字高的2/3。 汉字字粗为字高的1/5,数字及字母的字粗为字高的1/10。
电气控制与可编程序控制器
第二章 电气图及电气控制基本控制电路
第一节 电气图的基本知识 电气图:用电气图形符号绘制的工程图,是电气工程领域中提供信息的
最主要方式,提供的信息内容可以是功能、位臵、设备制造及接线等。
电气图的命名:根据其所表达信息的类型和表达方式确定,包括系统
图与框图、电路图、接线图与接线表、功能表图、逻辑图、位臵图等。
时间继电器
电气控制与可编程序控制器
第二章 电气图及电气控制基本控制电路
部分常用电器的电气图形符号和基本文字符号
KV
常开触点 常闭触点 热元件
FR
常闭触点 线圈
KA
常开触点 常闭触点
速度继电器
KU 线圈 常开触点
热继电器
KI 常闭触点 线圈 常开触点
中间继电器
常闭触点
电压继电器
YA HL M 三相 M
电气控制与可编程序控制器
第二章 电气图及电气控制基本控制电路
控制电路(b)不确定性 : 存在电磁时间常数和机械时间常数,继电器和接触器从线圈得电或失电到触 点完成动作需要时间,即吸合时间和释放时间(继电器:十几到几十ms,接触 器:几十到数百ms)。 假设KM2吸合时间是15ms,KM3释放时间是25ms,时间继电器KT的延时动 断触点和延时动合触点同时动作,星--三角变换时,KM3和KM2的主触点有约 10ms的时间同时接通。 控制电路(c) :改进控制电路(b),避免短路,节约电能 将KM3的动断辅助触点串联在KM2的线圈控制电路中,只有当KM3的衔铁及 触点释放完毕(动断辅助触点接通)后才允许KM2得电。 将KM2的动断辅助触点串联在KM3的线圈控制电路中,只有当KM2的衔铁及 触点释放完毕(动断辅助触点接通)后才允许KM3得电,保证电路工作可靠。 起动完成后时间继电器KT已无得电的必要,将KM2的动断辅助触点串联在 KT的线圈控制电路中, KT断电,节约能源。
电动机、吹风机接线图解(含单相电容、三相异步电动机、单三相吹风机)

电动机、吹风机接线图解(含单相电容、三相异步电动机、单三相吹风机)一、电动机接线一般常用三相交流电动机接线架上都引出6个接线柱,当电动机铭牌上标为Y形接法时,D6、D4、D5相连接,D1~D3接电源;为△形接法时,D6与D1连接,D4与D2连接,D5与D3连接,然后D1~D3接电源。
可参见图1所示连接方法连接。
图1三相交流电动机Y形和△形接线方法二、三相吹风机接线有部分三相吹风机有6个接线端子,接线方法如图2所示。
采用△形接法应接入220V三相交流电源,采用Y形接法应接入380V三相交流电源。
一般3英寸、3.5英寸、4英寸、4.5英寸的型号按此法接。
其他吹风机应按其铭牌上所标的接法连接。
图2三相吹风机六个引出端子接线方法三、单相电容运转电动机接线单相电动机接线方法很多,如果不按要求接线,就会有烧坏电动机的可能。
因此在接线时,一定要看清铭牌上注明的接线方法。
图247为IDD5032型单相电容运转电动机接线方法。
其功率为60W,电容选用耐压500V、容量为4μF的产品。
图3(a)为正转接线,图3(b)为反转接线。
图3IDD5032型单相电容运转电动机接线方法四、单相电容运转电动机接线图4JX07A-4型单相电容运转电动机接线方法图4是JX07A-4型单相电容运转电动机接线方法。
电动机功率为60W,用220V/50Hz交流电源、电流为0.5A。
它的转速为每分钟1400转。
电容选用耐压400~500V、容量8μF的产品。
图4(a)为正转接线,图4(b)为反转接线。
五、单相吹风机接线图5单相吹风机四个引出端子接线方法有的单相吹风机引出4个接线端子,接线方法如图5所示。
采用并联接法应接入110V交流电源,采用串联接法应接入220V交流电源。
六、Y100LY系列电动机接线目前,Y系列电动机被广泛应用。
Y系列电动机具有体积小、外形美观、节电等优点。
它的接线方式有两种:一种为△形,它的接线端子W2与U1相连,U2与V1相连,V2与W1相连,然后接电源;另一种为Y形,接线端子W2、U2、。
电动机正反转接线图及原理
电动机正反转接线图及原理
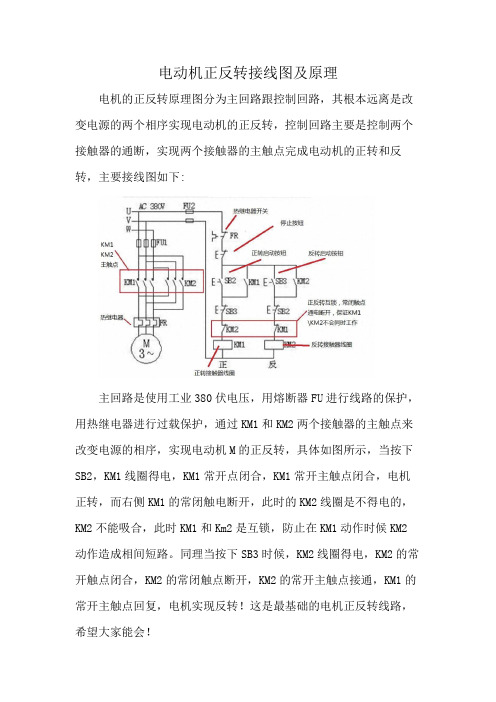
电机的正反转原理图分为主回路跟控制回路,其根本远离是改变电源的两个相序实现电动机的正反转,控制回路主要是控制两个接触器的通断,实现两个接触器的主触点完成电动机的正转和反转,主要接线图如下:
主回路是使用工业380伏电压,用熔断器FU进行线路的保护,用热继电器进行过载保护,通过KM1和KM2两个接触器的主触点来改变电源的相序,实现电动机M的正反转,具体如图所示,当按下SB2,KM1线圈得电,KM1常开点闭合,KM1常开主触点闭合,电机正转,而右侧KM1的常闭触电断开,此时的KM2线圈是不得电的,KM2不能吸合,此时KM1和Km2是互锁,防止在KM1动作时候KM2动作造成相间短路。
同理当按下SB3时候,KM2线圈得电,KM2的常开触点闭合,KM2的常闭触点断开,KM2的常开主触点接通,KM1的常开主触点回复,电机实现反转!这是最基础的电机正反转线路,希望大家能会!。
第5章-电气系统的图示-简分析

YH 单 相 变 压 器
整流变压器
照明变压器 控制电路电 M 源用变压器
电位器
G 接近敏感开 关动合触头
磁 铁 接近
T
时 动 作的
接 近 开关
的 动 合触 头
TC
接近开关
RP
动合触头
3、双字母符号:只有当用单字母符号不能满足 要求,容易混淆,需要将大类进一步划分时, 才采用双字母符号,以便较详细和更具体地表 述电气设备、装置和元器件。
图1.系统图
电源进线
总 控 制 系 统
材料进入
配电系统
液压动 力系统
冷却水供应 系统
轧钢机
压缩空 气系统
钢板存储
图2.电气原理图
• 3、功能图:表示理论的或理想的电路而 不涉及实现方法的一种图,其用途是提供 绘制电路图或其他有关图的依据。
• 4、逻辑图:主要用二进制逻辑(与、或、 异或等)单元图形符号绘制的一种简图, 其中只表示功能而不涉及实现方法的逻辑 图叫纯逻辑图。
RV
压敏电阻器
SA 控制、记忆、 控制开关
S
SB SP SQ
信号电路的
按钮开关 压力传感器
开关器件选 位置传感器
ST
择器
温度传感器
表1-4 单字母和双字母符号的使用规则
TA
电流互感器
H
HA
信号器件
HL
声响指示器 指示灯
T
TC TM
变压器
电源变压器 电力变压器
TV
电压互感器
KA
瞬时接触继电器
接触器继
如: “ F”表示保护器件类
“FU”表示熔断器
“FR”表示热继电器等
4、辅助文字符号:表示电气设备、装置和元器 件以及线路的功能、状态和性能。
电机正反转控制电路及实际接线图完整版
电机正反转控制电路及实际接线图Document serial number【NL89WT-NY98YT-NC8CB-NNUUT-NUT108】三相异步电动机正反转控制电路图原理及plc接线与编程在图1是三相异步正反转控制的电路和控制,图2与3是功能与它相同的控制系统的外部接线图和梯形图,其中,KM1和KM2分别是控制正转运行和反转运行的.在梯形图中,用两个起保停电路来分别控制电动机的正转和反转。
按下正转启动按钮SB2,X0变ON,其常开触点接通,Y0的线圈“得电”并自保。
使KM1的线圈通电,开始正转运行。
按下停止按钮SB1,X2变ON,其常闭触点断开,使Y0线圈“失电”,电动机停止运行。
在梯形图中,将Y0与Y1的常闭触电分别与对方的线圈串联,可以保证他们不会同时为ON,因此KM1和KM2的线圈不会同时通电,这种安全措施在继电器电路中称为“互锁”。
除此之外,为了方便操作和保证Y0和Y1不会同时为ON,在梯形图中还设置了“按钮互锁”,即将反转启动按钮X1的常闭点与控制正转的Y0的线圈串联,将正转启动按钮X0的常闭触点与控制反转的Y1的线圈串联。
设Y0为ON,电动机正转,这是如果想改为反转运行,可以不安停止按钮SB1,直接安反转启动按钮SB3,X1变为ON,它的常闭触点断开,使Y0线圈“失电”,同时X1的敞开触点接通,使Y1的线圈“得电”,点击正转变为反转。
在梯形图中的互锁和按钮联锁电路只能保证输出模块中的与Y0和Y1对应的硬件继电器的常开触点心不会同时接通。
由于切换过程中电感的延时作用,可能会出现一个触点还未断弧,另一个却已合上的现象,从而造成瞬间短路故障。
可以用正反转切换时的延时来解决这一问题,但是这一方案会增大编程的工作量,也不能解决不述的接触触点故障引起的短路事故。
如果因主电路电流过大或者接触器质量不好,某一接触器的主触点被断电时产生的电弧熔焊而被粘结,其线圈断电后主触点仍然是接通的,这时如果另一个接触器的线圈通电,仍将造成三相短路事故。
电工必须掌握的、最常见电路连接实物图

常见故障及处理方法 1、按下启动按钮,接触器不工作:检查熔断器是否熔断,检查热继电器是否动作,检 查电源电压是否正常,检查按钮触点是否接触不良,检查接触器线圈是否损坏。 2、不能自锁:检查启动按钮是否有损坏,检查接触器常开辅助触点是否未闭合或被卡 住(触点损坏)。 3、不能互锁:检查启动按钮是否有损坏,检查接触器常闭辅助触点是否未断开或被卡 住(触点粘连)。 本课小结: 1、电气控制系统图的组成:原理图、元件布置图、安装接线图 2、电器控制线路的构成和基本保护 1)电流保护 2)零压(或欠压)保护 3)互锁保护 4) 零励磁保护 3、电气控制基本控制规律:
式锺床改造中采用 PLC 的软元件,合理设计了控制程序,提高了系统的可靠性。
二、影响 PLC 电气系统可靠性的主要因素
PLC 控制系统可简单划分为三部分:发讯元件(输入部分)、记忆网络(程序部分)和电气 执行元件(输出部分)。对于用继电器控制的系统,影响系统可靠性的主要因素是中间继电 器组成的记忆网络。对于 PLC 控制系统,高可靠性的 PLC 取代了中间继电器组成的记忆网络, 克服了机械动作式中间继电器可靠性不高的固有毛病,使系统可靠性大为提高。此时,与 PLC 自身的安全性与 PLC 输入、输出连接的"发讯元件"和"电气执行元件"的可靠性,己变成 影响整个电气系统可靠性的主要因素。提高"发讯元件"和"电气执行元件"可靠性的同时,也 就提高了 PLC 的安全性,通常有两种方法:一种是选用高质量的元器件;另一种是对这些故 障率较高的元器件进行状态检测和故障诊断,但都受硬件条件和经济条件的影响而限制了应
特点: 1)初看电路者比较合适; 2)绘制难度大; 3)电器施工的依据。
电器控制线路

8/31/2019
返回第一张 上一张幻灯片 下一张幻灯片
例:电气安装接线图
8/31/2019
图2-4 CW6132型车床电气互连图
返回第一张 上一张幻灯片 下一张幻灯片
电气图纸规范
图 幅 尺 寸
(mm)
幅面 长 宽
幅面 长 宽
A0 A1 A2 A3 A4 1189 841 594 420 297 841 594 420 297 210 A3×3 A3×4 A4×3 A4×4 A4×5 891 1189 630 841 1051 420 420 297 297 297
速度继电器
热继电器
常开触点 常闭触点
中间继电器
U>
线圈
KA
常开触点 常闭触点
电压继电器
I>
线圈
KA
常开触点 常闭触点
电流继电器
变压器
YA
HL
M
M
SA
电磁铁 信号灯
8/31/2019
直流电动机
三相
异步电动机
转换开关
返回第一张 上一张幻灯片 下一张幻灯片
二、电气原理图
电气原理图是用来表示电路各电气元件中导电部 件的联接关系和工作原理的图。
图幅尺寸选择:电气图的规模与复杂程度;能够清晰地反映电气图的细节;
整套图纸的幅面尽量保持一致;便于装订和管理; CAD 绘制时,输出设备(打印机、绘图仪等)对于输出幅面的限制。
8/31/2019
图框线:根据图纸是否需要装订以及图纸幅面的大小确定。
需要装订的图纸的图框线
A0、A1、A2:a=25mm,c=10mm 其它: a=25mm,c=5mm
分区的编号,水平方向用阿拉伯数字,垂直方向用大写英文字母。编 号从图纸的左上角开始,分区代号用行与列两个编号组合而成。
常用电机控制电路图
SB2
KM1
KM2
KT1 KM2
KT2
KM3 KT3 KM4
KM3 KM4
KM1 KT1 KM2 KT2 KM3 KT3 KM4
图2-15(c)
第二十二页,共33页。
(c) 电路 的动
作 (dò ngz uò) 时序
FR SB1
SB2
KM1
KM2
KT1 KM2
KT2
KM3 KT3 KM4
KM1
KM3 KM4
L1 L2 L3
QS FU
KM2
KM1 R
FR
M
第二页,共33页。
控制线路:
1、基本原理:用时间继电器 KT控制KM1、KM2切换。
2、KM1、KM2允许同时吸合, 但是电动机正常运行后,一 般(yībān)应该将KM1释放, 以降低运行损耗。
3、图2-8(a)为KM1不退出 的控制线路。
4、图2-8(b)为KM1退出而 KT 不退出的控制线路。
SB2
KM1
1、按时间原则(yuánzé)控 制
M
KT1
KT2
KT3
KM4 3R
KM3
KM1 KT1 KM2 KT2 KM3 KT3 KM4
2R
(a)基本(jīběn)电
KM2 1R
图2-15时间原则控制路(kòngzhì)转子电路串
电阻起动控制(kòngzhì)线路
第十八页,共33页。
基 本 电 路
KM1 KM2 KT
KM2先通电,KM1后断电(duàn diàn); KM1,KM2同时切换; KM1先断电(duàn diàn),KM2
后通电
第八页,共33页。
自锁回路(huílù)的转换
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
各种电气控制原理图和实物接线图及直流电 动机其线圈绕线方法
大连安大制冷设备服务
i负载
大连安大制冷设备服务大连安大制冷设备服务
熔蚯器 常开鮭点 1(0… 负载
停止按钮启动按钮 大连安大制冷设备服务
零火LII・
负载 断停止启动 大连安大制冷设备服务 零火
断路器
停止 启动
负载 大连安大制冷设备服务 负载 停止按钮启动按钮 大连安大制冷设备服务
N 漏电 |折 ■踣
熔断器侣"止按钮启动■按左丑
■热继电器 接触器
负载 大连安大制冷设备服务 大连安大制冷设备服务
零火 捋止按钗 启动按钮
热继电器 •负载 大连安大制冷设备服务 负载
熔断器 停止按钮启动按钮 热继雯器 灵载 三、电动机 液位继电器自动揑制泵水 电机运行限位自动回程
布程开关 停止按钮 CJ10-10接袖器
启动按钮 顺启动 顺点动 顺点动
逆点动 延时断电停机 UIVIWI 紐
4 I
I □
0
77 TTT l_j14CJ 卜
K'SII 电动机反接制动控制电路 fTl
邺电训机耕恸備I电跚
JR 时间继电器控需
IKMKTKM* I
■
I申 :t
0 == □
11
KMI
rtJt u——s u tj_0
Vj I厚■f
.豌.THM
・■■•11■ li__1 ra
_l±
*3E+
孑i
电赫芦控制鳞 E IB 2
爭一 rwr
.也Lp-J.
-H-ta- 一:2极电机。转速2950转
4极电机。转速1470转 6极电机。转速750转 8极电机。转速500转 二:1、电机的级数实际上反映的确实是电机的同步转数,如级数为2级的电机,同步转数为2900rpm,4级的为1450rpm,6级那么为1000rpm,8级为750rpm。 2、关于电机级数的选择,要紧依照电机驱动机械设备对电机输出转数的要求;如减速机输入转数的要求、皮带转动主动轮的转数要求等。一样是通过实际所需转数,考虑传动比因素返算所得。 三:极数反映出电动机的同步转速,2极同步转速是3000r/min,4极同步转速是1500r/min,6极同步转速是1000r/min,8极同步转速是750r/min。绕组的一来一去才能组成回路,也确实是磁极对数,是成对显现的,极确实是磁极的意思,这些绕组当通过电流时会产生磁场,相应的就会有磁极。三相交流电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极个数确实是极数。由于磁极是成对显现的,因此电机有2、4、6、8……极之分。 就一般三相异步交流电动机来说,它的磁极对数阻碍了它的转速,转速=〔电源频率X60〕三磁极对数X〔1-转差率〕。在理想的同步状态下,转速=电源频率X60三磁极对数。实际情形下,电机转速不可能达到同步状态,也确实是存在转差率。比如二极电机,它的极对数是1,那么它的同步转速确实是50X60^1=3000,然后由于转差率的不同,二极电机转速就有2960,2940等转速,同样八极电机的转速<750,转差率不一样,实际转速稍有出入。然而不可能〉同步转速。
直流马达及其线圈绕线方法 本发明是关于一种直流马达及其线圈绕线方法,该方法以一单一导线在成型柱杆依预定匝数依序卷绕,形成一个偶数个线圈组的定子线圈,该定子线圈具有一第一端及一第二端,定子线圈的相邻二线圈组的卷绕方向成反相,该具偶数个线圈组的定子线圈能够被安装在直流马达的壳体,与转子的永久磁铁相对应,籍由定子线圈通以电流产生的磁力推斥具永久磁铁的转子转动。本发明克服了公知技术存在的缺陷,加工、制造方便,在卷绕时能够幸免因碰触磁极片而刮伤造成线圈短路,且定子线圈在作接线工作或组设时亦会专门方便容易,且可不能有误接问题。 1、一种直流马达的线困绕线方法,其特点在于:提供一单一导线,将该导线在成型柱杆上以预定匝数依序卷绕,以形成偶数个线圏组的定子线圏,且该定子线圏具有一第一端及一第二端,该定子线圏的相邻二线圏组的线圏卷绕5方向反相。 2、如权益要求1所述的直流马达的线圏绕线方法,其特点在于:以一单一导线在卷绕偶数个线圏组的定子线圏时,其在成型柱杆上以相同的方向卷绕相同的匝数,卷绕完成后将该具偶数个线圏组的定子线圏取离成型柱杆,再将定子线圏第偶数组翻转180。使具偶数线圏组的定子线圏的第偶数组线圏与10第奇数组线圏的线圏卷绕方向相反。 3、如权益要求1所述的直流马达的线圏绕线方法,其特点在于:以一单一导线在卷绕偶数个线圈组的定子线圏时,其在成型柱杆上以相同的方向卷绕相同的匝数,卷绕完成后将该具偶数个线圏组的定子线圏取离成型柱杆,再将定子线圏第奇数组翻转180。使具偶数线圏组的定子线圏的第偶数组线圏与15第奇数组线圏的线圏卷绕方向相反。 4、一种直流马达,其特点在于: 包括:壳体,设一容室及该容室底部具一支持部,该壳体具一操纵件,且壳体具有一偶数线圏组的定子线圈,该电子线圏由一单一导线连续卷绕形成,且20该相邻的二线圏组的线圏卷绕方向反相;转子,设一转动轴在壳体的支持部旋转,该转子具队3磁极的永久磁铁,该转子可被壳体上定子线圏的各线圏组产生的磁场推斥转动。 5、如权益要求4所述的直流马达,其特点在于:所述壳体容室的壁设偶数个固定件,该各固定件可供各线圏组固定。 直流马达及其线圏绕线方法技术领域本发明是关于一种直流马达及其线圏绕线方法,该马达的定子线圏能够方便被缠绕,以构成一直流马达的定子。 背景技术请参阅图7所示,为一种公知的以径向绕线方法形成的直流马达定子90,该定子90的绕线方法,是以导线901在对定子90绕线前,将导线901—端形成第一接点VI,导线901先对半数极臂90&、906进行绕线,当绕线完成时必须作暫时停顿,以便拉出导线901形成接点70(即共接点〕,再连续对剩下的半数的极臂90。90(1进行绕线。当所有极臂90^90、90。90(1完成绕线时,15该导线901另一端形成第三接点乂2。因此,定子90可利用该双组线圈马达驱动电路,产生交变的旋转磁场,以驱动具I5磁极的转子。此种公知的径向绕线过程中,必须中途停顿不能一次卷绕完成。 请参阅图8所示,为第二种公知的直流马达定子的绕线方法,是以导线911在对定子91绕线前,将导线911一端形成第一接点VI,而当导线911对定子20卷绕完所有定子极臂91&、916、91。91(1时,该导线911另一端形成第二接点乂2。因此,定子91可利用该单组线圏马达驱动电路,且在单组线圏上以正反向的电流导通,以产生交变的旋转磁场供驱动具I5磁极的转子。该第二种公知的径向绕线方法,以单一导线进行绕线,其必须依所需的线圏匝数在定子的各极臂91&、91、910、91(1绕上相等于匝数的圏数。因此,在绕线速度25有一定极限的情形下,实际上并无法减少定子的绕线时刻。 图1本发明的线图卷制步骤一;5图2本发明的线圏卷制步骤二;图3本发明的线圏卷制步骤三;图4本发明使用在径向气隙无刷马达分解立体图;图5本发明使用在径向气隙无刷马达俯视剖面图;图6本发明使用在轴向气隙无刷马达分解立体图;10图7第一种公知径向气隙无刷马达俯视剖面图;图8第二种公知径向气隙无刷马达俯剖面图;图9第三种公知径向气隙无刷马达俯视剖面图;图10公知轴向气隙无刷马达分解立体图。 附图标号说明151、导线11、第一端12、弟二端10、定
子线圏10&、线圏组10、线圏组10。线圏组106、线圏组2、柱杆3壳体31、容室32、支持部33固定件34、比操纵件35、定子轭36、电路板4、转子41、转动轴42、永久磁铁43、永久磁铁具体实施方式请参阅附图,将本发明举以下实施例说明。请参阅图1、2所示,为本发明的定子线圏10卷绕制造方式。本发明的定子线圏10由一单一导线1在预定形状的柱杆2上依序以相同25的方向卷绕〔依图面而言为顺时针方向〉,该定子线圏10的线圏组数依形成马达极数的需要而卷绕,且被卷绕为偶数个线圏组10&、10、10。101该各线圏组的匝数依需要形成相同的预定匝数,亥具偶数个线圏组的定子线圏10由一单一导线连续卷绕形成,且具有一第一端11及一第二端12。
请参阅图3所示,当该一次连续卷绕且具偶数个线圏组10&、10以10。10(1的定子线图10被卷制完成后,由该定子线圏10中的第奇数的线圏组103、5100或第偶数的线圏组101101作180。的翻转。在优选实施例当中,将排列在第偶数的线圏组106、10(1〖依图面而言,由左侧算起〕翻转,因此,该第偶数的线圏组10、10(1其卷绕方向即形成与第奇数的线圏组10&、10〔为相反方向。在本优选实施例当中,亥第偶数的线圏组1015、10(1的卷绕方向为逆时针方
向,因此,藉由该线圏组106、10人的卷绕方向的改变,能够达到改变线10圏组1此、104的电流方向及其产生的磁场方向。 请参阅图4、5所示,为本发明使用在径向气隙马达的一优选实施例,由一壳体3设有一容室31,亥容室31底部具一支持部32,该支持部32能够支持转子4的转动轴41旋转,专子4本身具有永久磁铁环42,永久磁铁环42具有15磁极。壳体3由形成容室31的内壁或外壁设数个固定件33,亥固15定件33能够为沉孔或柱,吏该由偶数个线圏组10&、10、10。1叱所构成的定子线圏10能够分别被固定在该各固定件33位置,由该各线圏组10&、10、10。10人与转子4的永久磁铁环42相对应设置,且由于该定子线圏10的相邻二线圏组103、106或10、100的电流方向及磁场方向不同。因此,该定子线圏10被通以电流后各线圏组10&、106、10。
103可产生不同的交变磁场,20该磁场所形成的磁力可推斥转子4的永久磁铁环42转动,且由
壳体3所设霍尔感应元件及驱动电路构成的化操纵件34可监测转子4的永久磁铁环42的I3极变化,因此该1(3操纵件34可发出讯号使定子线圏10的各线圏组10&、105、10。10(1交替改变电流方向,以使转子4可连续转动。 请参阅图6所示,为本发明使用在轴向气隙马达的实施例,该壳体3具一25容室31,可支持转子4的转动轴41旋转,转子4的顶盘设有永久磁铁43,该永久磁铁43具有I3极;