拉格朗日松弛算法求解组合优化问题
基于拉格朗日松弛和遗传算法的供应链协同计划_聂兰顺
收稿日期: 2005- 10- 07; 修订日期: 2006- 01- 20。Received 07 Oct. 2005; accepted 20 Jan . 2006. 基金项目: 国家 863/ CIMS 主题资助项目( 2003AA4Z3210) 。Foundation item: Project sup ported by the National H igh - T ech. R& D Program
文献标识码: A
Collabor ative planning in supply chains based on Lagrangian relaxation and genet ic algor ithm
N I E Lan- shun, X U X ia o- f ei, ZH AN De- chen ( Sch. of Computer S& T, H ar bin Inst. of Tech. , H ar bin 150001, China) Abstr act: Optim izat ion of collaborative planning among pa rtners acr oss var ious supply cha ins was studied. Linking constr aints and dependent demand constra int s were added to the monolit hic Multi- Level, multi- item Capacitated Lot Sizing P roblem ( MLCLSP) model for supply chains. Based on separ able str uctur es of the model, MLCLSP was decomposed into facility- separable sub pr oblems by Lagr angian relaxation technology. Genetic algorithm was incor2 por ated into Lagr angian relaxation method to update the Lagrangian multiplier s so as to coordinate decent ralized de2 cisions of the facilit ies. The product ion planning of independent par tners could be coor dinat ed and optim ized by this framework without interfer ing their decision author ity and pr ivat e information. Simulat ion experiments showed that the proposed mechanism and a lgorithm came close to optima l results as obtained by centr al coordination in ter ms of both performance and robustness. Key words: supply chain planning; collabor ative planning; Lagr angian relaxat ion; genet ic algor ithm
python怎么编拉格朗日松弛算法

一、概述Python是一种高效的编程语言,广泛应用于科学计算、人工智能、数据分析等领域。
在数学优化领域中,拉格朗日松弛算法是一种常用的算法,用于求解带等式约束的非光滑优化问题。
本文将介绍如何使用Python编写拉格朗日松弛算法。
二、拉格朗日松弛算法概述1. 拉格朗日松弛算法的原理拉格朗日松弛算法是一种用于求解非光滑优化问题的算法,它通过松弛等式约束,将原始问题转化为一个易于求解的变分问题。
其原理是引入拉格朗日乘子,将原始问题的等式约束松弛成为惩罚函数,从而转化为一个无约束优化问题。
2. 拉格朗日松弛算法的应用领域拉格朗日松弛算法广泛应用于实际问题中,例如电力系统优化、交通网络优化、通信系统优化等领域。
在这些领域中,常常需要求解带等式约束的非光滑优化问题,而拉格朗日松弛算法正是针对这类问题的有效求解方法。
三、Python编写拉格朗日松弛算法的实现1. 导入相关库在使用Python编写拉格朗日松弛算法时,我们首先需要导入相关的数学库,例如NumPy、SciPy等,以便进行数值计算和优化求解。
2. 定义拉格朗日函数编写拉格朗日松弛算法的第一步是定义拉格朗日函数。
拉格朗日函数是原始问题与相应拉格朗日乘子构成的函数,它是将原始问题的等式约束通过乘子松弛得到的。
我们可以使用Python的函数定义语法来编写拉格朗日函数,其中包含原始目标函数和等式约束的求解。
3. 实现拉格朗日松弛算法一旦定义了拉格朗日函数,接下来就可以编写拉格朗日松弛算法的实现。
在Python中,我们可以使用SciPy库中的优化求解器来求解拉格朗日函数的最优值,从而得到原始问题的最优解。
四、案例分析:拉格朗日松弛算法在电力系统优化中的应用以电力系统优化为例,我们将使用Python编写拉格朗日松弛算法,求解带等式约束的非光滑优化问题。
在电力系统优化中,常常需要考虑发电机出力的平衡约束,而这正是拉格朗日松弛算法擅长处理的问题。
1. 问题建模我们需要将电力系统的优化问题进行数学建模,包括目标函数、等式约束、不等式约束等。
组合最优化问题及其求解优化算法
组合最优化问题最基本的特点就是变量是离散的, 由此导致其数学模型中的目标函数和约束函数在其可行域内是也是离散的。
在现实世界中,许多的实际问题本质上是离散事件的而不是连续事件,都可归结为组合最优化问题。
这类问题在理论上多数都属于NP难问题,NP类问题仍属于可计算问题,即存在算法来求解。
求解这类组合最优化问题方法分为精确算法和近似算法两类。
常用的精确算法有动态规划、分支定界和枚举等。
精确算法只能解决一些小规模问题,当求解小规模组合优化问题时可以用这类精确算法在较短的时间内得到最优解。
当求解大规模组合优化问题时,理论上可以得到问题的最优解,但由于计算量太大,所以使用精确算法并不可行。
利用精确算法求解NP-hard组合优化问题时,即使能得到最优解,但所需要的计算时间过长,在实际问题中难以直接应用。
近似算法是指在合理的计算时间内找到一个近似的最优解。
近似算法虽然求解速度较快,但并不能保证得到问题的全局最优解。
近似算法分为基于数学规划(最优化)的近似算法、启发式算法和基于智能优化的近似算法。
1) 基于数学规划(最优化)的近似算法是根据对问题建立的数学规划模型,运用如拉格朗日松弛、列生成等算法以获得问题的近似解,是以数学模型为基础,采用列生成、拉格朗日松弛和状态空间松弛等求解问题。
拉格朗日松弛(LR)算法求解问题的主要思想是分解和协调。
首先对于NP难的优化问题,其数学模型须具有可分离性。
通过使用拉格朗日乘子向量将模型中复杂的耦合约束引入目标函数,使耦合约束解除,形成松弛问题,从而分解为一些相互独立的易于求解的子问题,设计有效的算法求得所有子问题的最优解。
利用乘子的迭代更新来实现子问题解的协调。
列生成(Column generation, CG)算法是一种已经被认可的成功用于求解大规模线性规划、整数规划及混合整数规划问题的算法。
与智能优化算法相比,基于数学规划的近似算法的优点是通过建立问题的数学模型,松弛模型中难解的耦合约束或整数约束,得到的松弛问题的最优解可以为原问题提供一个下界。
改进的拉格朗日松弛数据关联算法
火 力 与 指 挥 控 制
F r n r I C mma d C n r l i Co td & o e n o to
第 3 6卷 第 l 0期 21 年 1 01 0月
文章 编 号 :0 20 4 (0 11- 000 1 0— 60 2 1 ) 00 2 —4 -
日乘 子 更 新 一 般 用 次 梯 度方 法 , 每 次迭 代都 要 进 行 多 次极 小化 运 算 来 求 对 偶 解 , 致 实 时 性 差 。针 对 这 个 问题 , 出 了 一种 但 导 提 改 进 的基 于拉 格 朗 日松 弛 的 数 据 关 联 算 法 , 过 代 理 修 正 次 梯 度 方 法 更 新 拉 格 朗 日乘 子 , 在 允 许 时 间 内获 得 近似 解 。仿 真 通 并 实 验 表 明 , 现有 的次 梯 度 算 法 相 比 , 算 法 具 有 更 少 的 运 算 时 问 和 更 高 的关 联 正 确 率 。 与 此
修 回 日期 :0 01 -9 2 1 —01 .
*基 金 项 目 : 家 自然科 学 基 金 (0 0 0 3 ; 防 预 研 基 金 国 6851)国
资 助 项 目(0 9 X 2 0X X)
作 者 简 介 : 长 宁 (9 3 ) 男 , 北 衡 水 人 , 士 研 究 童 1 8一 , 河 硕 生, 主要 研 究 方 向 : 目标 跟 踪 。 多
量测 中分离 出来 形 成 观测 集 合 , 后对 观测 集进 行 然
行 实 时的 、 高精 度 的识 别和估 计 。 去 的传 感器 监视 过 系统很 长时 间都 是依赖 单个传 感器来 对 目标进 行识 别, 然而 , 单传感 器 的能力范 围 已经 达不 到当前 及未 来 的需求 。近 十年来 , 多传感 器多 目标跟踪 问题 , 已
拉格朗日松弛算法
上述问题等价于: zLD max
cT x k T (b Ax k ) , k K s.t. (cT T A)r j 0, j J 0
整理得:
z LD max
T ( Ax k b) cT x k , k K
s.t.
T T T z ( ) min( c A ) x b 证明: LR xQ
min (cT T A) x T b
xCon ( Q )
min [cT x T (b Ax)]
xCon ( Q )
k 设Con(Q)的极点为{x | k K},极方向为 {r j | j J }则:
0, zLR ( ) zIP
min cT x s.t.Bx d
n x Z
(5.2.1)
证明:
LR :
IP :
Z LR ( ) min{(cT T A) x T b} Bx d(简单约束) , s.t. n x Z . Z IP min cT x Ax b, (难约束) s.t. Bx d(简单约束) , n x Z .
1, x* 0,
dj 0 other
5.2
IP :
拉格朗日松弛理论
Z IP min c x
T
s.t.
Ax b, (难约束) Bx d(简单约束) , n x Z .
n S {x Z | Ax b, Bx d}
原 整 数 规 划 问 题
S1 Con(Q {x R | x1 2 x2 4})
n n S 2 Con(Q) {x R | x1 2 x2 4}
拉格朗日松弛算法(LR)
s t =0则达到了最优解而停止计算;否则,
t=t+1,重复STEP2;
t 1 max{ t t st , 0}
t
uper lower st
2
with
0 2
Illustration of SG
upper1
上升很慢
Gama
Lemma1:when w f *
3000
3500
lower
不同的下界开始的时间 40 36 35 从 下 界 36, 上 届 40开 始 搜 索
30 从 下 界 0, 上 届 40开 始 搜 索 25
value
20
15
10
5
0
0
100
200
300
400
500 counter
600
700
800
900
1000
description
yes
end
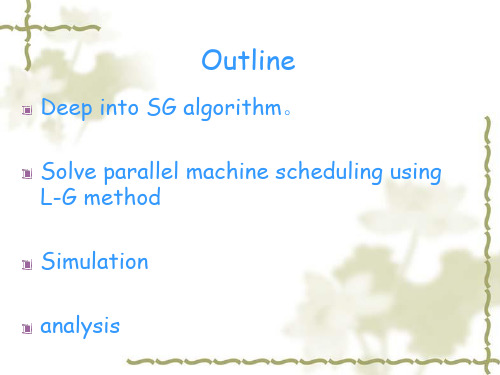
Simulation results
eg1: 12 jobs and 2 identical machines ; Eg2:25 jobs and 4 identical machines ; Result: Eg1 bound=31.82 with best heuristic result 34; Eg2 bound=37.74 with best heuristic result 38;
Max L
with
L k M k Min iTi k ik { Bi } k i k
* k
dJ * dM k
Pai stands for the cost of resource at time k
第8章_松弛算法
目 标 值
最优值
例子1: 线性规划松弛: 在7.1.1中,将整数约束松弛 为实数, 称其为7.1.1的线性规划松弛: Z LP min cT x 7.1.2 Ax b, s.t. n x R .
注: 1. 定理7.1.1: ZLP ZIP 2. 此类算法适合于整数规划问题中,决策变量为 较大整数的情形. 3. 此类算法分两阶段: 第一阶段为求松弛后线 性规划问题的最优解; 第二阶段为将解整数化, 并考虑可行性.
注:定理7.2.1说明拉格朗日松弛是IP问题的一个下 界,但我们应该求与IP最接近的下界,即:
( LD) z LD max{z LR ( )}
0
定义7.2.1 若 x, y D ,满足以下条件,则称D为凸集.
x (1 ) y D,0 1
对于离散点集 Q {P | i 1, 2,},其凸包 i 定义为:
S1 Con(Q {x R | x1 2 x2 4})
n n S 2 Con(Q) {x R | x1 2 x2 4}
x1 2x2 4
4 3 2 1 1
B
C
S1
2
3
D
4
x1 2x2 4
4
3 2 1 1
B
C
S2 2 3 4
D
由推论7.2.1可以知道, zIP zLD 由两个因素有关: 第一个因素是目标函数中的C,推论7.2.1要求对所 有的C满足S1=S2,但也可能存在某个C使得 zIP zLD 第二个因素是可行解的区域.由上面的图形可知,SI 和S2不同,所以存在一个C,使得 zIP zLD不为零,如 8 z LD 28 ,在 1 达到拉格朗日对偶问 在例7.2.1中, 9 9 题的最优值,其最优解为(4,0); zIP 28 ,其一个最优 解也为(4,0).由此我们可以知道,即使拉格朗日松弛 在某个 下达到的最优解为原问题的可行解,我们 也不能断言 zIP zLD .除非此时 0 .
改进的拉格朗日松弛数据关联算法
改进的拉格朗日松弛数据关联算法
童长宁;林岳松;郭云飞;左燕
【期刊名称】《火力与指挥控制》
【年(卷),期】2011(036)010
【摘要】在多传感器多目标跟踪领域中,当传感器为被动式的,传统的多维分配算法利用拉格朗日松弛算法求解.拉格朗日乘子更新一般用次梯度方法,但每次迭代都要进行多次极小化运算来求对偶解,导致实时性差.针对这个问题,提出了一种改进的基于拉格朗日松弛的数据关联算法,通过代理修正次梯度方法更新拉格朗日乘子,并在允许时间内获得近似解.仿真实验表明,与现有的次梯度算法相比,此算法具有更少的运算时间和更高的关联正确率.
【总页数】5页(P20-23,27)
【作者】童长宁;林岳松;郭云飞;左燕
【作者单位】杭州电子科技大学信息与控制研究所,杭州 310018;杭州电子科技大学信息与控制研究所,杭州 310018;杭州电子科技大学信息与控制研究所,杭州310018;杭州电子科技大学信息与控制研究所,杭州 310018
【正文语种】中文
【中图分类】TN953
【相关文献】
1.改进的拉格朗日松弛法求解机组组合问题 [J], 何小宇;张粒子;谢国辉
2.改进拉格朗日松弛算法在多故障诊断中的应用 [J], 黄家成;闫涛;吕游;宋家友
3.运输能力有限混合流水车间调度的改进拉格朗日松弛算法 [J], 轩华
4.拉格朗日松弛对偶问题的一个改进次梯度算法 [J], 何方国
5.多传感器多目标数据互联中的拉格朗日松弛算法研究 [J], 周莉;何友;王峰;刘永铮
因版权原因,仅展示原文概要,查看原文内容请购买。
拉格朗日松弛算法
7.1 基于规划论的松弛算法
173
使得减少一些约束后的问题在多项式时间内求得最优解。由此,将这些减少的约束称为难约
束。对于线性整数规划问题,将难约束吸收到目标函数后,问题又变的容易求解。这时解的
质量完全依赖于吸收到目标函数时所选取的参数。
例 7.1.1 集合覆盖问题(The set covering problem)
j =1
i =1
j =1
s.t. x j ∈{0,1}, j = 1,2,L,n,
λ ≥ 0.
记
则松弛后的模型为
m
∑ d j = c j − λ i aij , i =1
n
m
∑ ∑ zLRSC (λ) = min d j x j + λ i
j =1
i =1
s.t. x j ∈{0,1}, j = 1,2,L,n,
定理 7.1.1 zLP ≤ z1 。
定理 7.1.1 说明线性规划松弛得到整数规划的一个下界。可以通过单纯形算法或多项式
时间的内点算法[1],求得(7.1.2)的线性规划的最优解。
当 S 中的一个解 x0 满足 cT x0 = z LP 时,推出 x0 为(7.1.1)的最优解。作为求解整数规划
问题启发式算法的一部分,线性规划松弛适用于整数规划问题中决策变量是比较大的整数。
由定理 7.1.2 得到 ∀λ ≥ 0 ⇒ zLR (λ) ≤ zIP 。□ 定理 7.2.1 说明拉格朗日松弛是 IP 的下界,我们的目的是求与 zIP 最接近的下界。于是
需要求解
(LD)
z LD
=
max λ≥0
z
LR
(λ
)
。
问题 LD 称为 IP 的拉格朗日对偶。用下例来理解拉格朗日松弛和对偶等概念。先定义
电气工程论文-论述电力系统旋转备用解读
3、针对风电波动性大的特点,根据已有的风电功率波动范围的研究,设置一定的下调旋转备用,以保证当风力发电大大多于预测值或出现极端波动情况时系统不至于切风机;
4、采用拉格朗日松弛法对机组组合模型进行求解以比较不同备用配置方案的可靠性和经济性,并编制了基于Matlab语言的机组组合程序。同时对算法和程序进行部分修改,使其能够处理带有下调备用的机组组合问题。
1.2.2Байду номын сангаас
一般的,旋转备用是指运行正常的发电机维持额定转速,随时可以并网,或已并网但仅带一部分负荷,随时可以加出力至额定容量的发电机组。旋转备用容量也可看作是发电设备可能发的最大功率与系统发电负荷之差,在机组组合问题中一般将旋转备用容量表达为:
(1-1)
式中 为系统t时段的旋转备用容量, 和 分别为系统t时段机组i的机组出力及机组状态,N为机组数, 为t时段的负荷值。
文献[22]考虑了负荷及风电功率预测偏差,对并入风电前后系统的备用情况差异性进行分析,为电力系统安全稳定运行提供了一定参考意见。
文献[23]提出了能够应对负荷预测误差、风电预测误差和机组随机停运的系统最优旋转备用容量确定方法,然后采用蒙特卡洛模拟将提出的方法与原有备用配置方法进行了比较。
文献[24]利用风电预测误差等影响备用容量的不确定因素建立了备用容量和可靠性之间的函数关系。但是其缺陷在于确定的函数关系太过复杂,在机组组合中难以求解。
然而,随着风电规模的不断扩大,风力发电对电力系统也带来了新的挑战。风力自身具有很强的随机性和间歇性特点,风电场的运行具有很大的不确定性,无法稳定的输出功率。电网接入风电场后,风电的不确定性可能会造成系统电能质量和系统运行稳定性的下降。同时,由于现阶段风电功率预测误差仍较大,大规模风电接入电网会给电网的调度及发电计划的制定带来困难。国内外文献均一致认为,风力发电给电力系统调度带来的最大困难是由于其功率不可控的波动性。更深入的研究表明,大规模风电接入后,系统秒至分钟级的自动发电控制(auto generation control,AGC)容量需求并没有显著增加,但日内的调峰容量需求会随着风电装机容量的增加而显著增长。因此拥有足够灵活的可调节容量即旋转备用是电力系统接纳风电的先决条件之一[8-10]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例2: 对偶规划松弛方法: 7.1.2的对偶形式为:
Z DP max y b T A y c, s.t. n y R .
T
7.1.3
其中Y为决策变量.
注: 由对偶理论知,7.1.2和7.1.3有相同的最优值,
至于采用其中的哪个模型求解7.1.1的下界, 需比较哪个计算简单.
n n Con(Q {x R | Ax b}) Con(Con(Q) {x R | Ax b})
Con(Q) {x R | Ax b}
n
再由定理7.2.2: zIP
xCon ( Q { xR | Ax b})
min cTnx
zLD
0, zLR ( ) zIP
min cT x s.t.Bx d
n x Z
(7.2.1)
证明:
LR :
IP :
Z LR ( ) min{(cT T A) x T b} Bx d(简单约束) , s.t. n x Z . Z IP min cT x Ax b, (难约束) s.t. Bx d(简单约束) , n x Z .
T T T z ( ) min( c A ) x b 证明: LR xQ
min (cT T A) x T b
xCon ( Q )
min [cT x T (b Ax)]
xCon ( Q )
k 设Con(Q)的极点为{x | k K},极方向为 {r j | j J }则:
1, x* 0,
dj 0 other
7.2
IP :
拉格朗日松弛理论
Z IP min c x
T
s.t.
Ax b, (难约束) Bx d(简单约束) , n x Z .
n S {x Z | Ax b, Bx d}
原 整 数 规 划 问 题
n
i j
) x j bi
k 1
m
注: 代理松弛法保证目标函数,整数规划约束不变, 显然,由代理松弛法求得的解不一定可行
例4. 拉格朗日松弛方法
基本原理: 将目标函数中造成问题难的约束吸 收到目标函数中,并保持目标函数的线性,使问题 容易求解.
Q:为什么对此类方法感兴趣? A: (1). 在一些组合优化中,若在原问题中减 少一些约束,则使得问题求解难度大大降 低.(我们把这类约束称为难约束). (2). 实际的计算表明此种方法所得到的结 果相当不错.
2 x Z
7.2.2
第一个约束为复杂约束,其拉格朗日松弛后的 模型LR为:
z LR ( ) min{(7 ) x1 (2 2 ) x2 4} s.t. 5 x1 x2 20 2 x1 2 x2 7 x1 2 x2 4 xZ
n zsc min c j x j j 1 n s.t. ai j x j 1, i 1 m j 1 x {0,1}, j 1 n j n m n z LRSC min{ c j x j i (1 aij x j )} j 1 i 1 j 1 j 1 n s.t.x j {0,1}, 0
2
7.2.3
l3 4
B C
7.2.3 图 解 示 意
l4 l1
( 4 1 T , ) 17 17
3 l2 2 A 1 1 2
3
E
4 D
0 1 2 1
下降方向 (7,2) (7.5,1) (8,0)
最优解 (3,4) (4,0) (4,0)
7 53 6 5 2
T T j , if j J , ( c A ) r 0 T T T min(c A) x b T k T k x Q c x ( b Ax ), other : k K
由LD问题有限,则有:
T T j 存在 0 , j J, 使得 (c A)r 0 T k T k z max z ( ) max min[ c x ( b Ax )] LD LR 0 0 kK
T Ar j cT r j , j J 0
其对偶问题为:
z LD min cT ( k x k j rj )
kK jJ
k 1 kK s.t. A( k x k k r j ) b k kK kK kK k 0, k K ; j 0, j J .
7.1 基于规划论的松弛方法
整数规划模型:
Z IP min cT x Ax b, s.t. n x Z .
7.1.1
松弛的定义(7.1.1): 问题 RP :
Z R min zR ( x)
xSR
满足下列性质时,称为7.1.1的一个松弛(relaxation).
例3. 代理松弛法:
当(7.1.1)中的约束太多时,代理松弛一个约束
n K K
( a
j 1 k 1
ik j
Байду номын сангаас
) x j bik
k 1
代替(7.1.1)中的 K 个约束 n
a
j 1
ik j
x j bik , k 1 K
m
极端情况可以用一个代替全部
( a
j 1 k 1
上述问题等价于: zLD max
cT x k T (b Ax k ) , k K s.t. (cT T A)r j 0, j J 0
整理得:
z LD max
T ( Ax k b) cT x k , k K
s.t.
zLR ( )
-29 -32 -32
zLR ( , x*)
2 2 53 6 5 2 )T
T (7 , 2 2 )T ( x1 (), x2 ())
单位化下降方向:
(
,
lim(
7 53 6 5 2
,
2 2 53 6 5 2
)T (
1 2 T , ) 5 5
最优值只能在(4,0)和(3,4)两点得到,过这两点的直 线方程:y+x4=16.其垂直方向为: ( 4 , 1 )T
17 17
7 53 6 5 2
,
2 2 53 6 5 2
(
4 1 T 1 , ) 9 17 17
注:定理7.2.1说明拉格朗日松弛是IP问题的一个下 界,但我们应该求与IP最接近的下界,即:
( LD) z LD max{z LR ( )}
0
定义7.2.1 若 x, y D ,满足以下条件,则称D为凸集.
x (1 ) y D,0 1
},其凸包 对于离散点集 Q {P i | i 1, 2, 定义为:
xCon (Q ){ xR | Ax b}
min cT x n
若对仸何c有 zIP zLD ,则问题得证.
例7.2.1 假设整数规划问题IP
zIP min{7 x1 2 x2 } s.t. x1 2 x2 4 5 x1 x2 20 2 x1 2 x2 7 x1 2 x2 4
1 Con(Q) {P i P | R , i 1} i i i i
显然Con(Q)为凸集.
定理7.2.2
若拉格朗日对偶问题的目标值有限,则
zLD min{cT x | Ax b, x Con(Q)}
n 其中:Q {x | Bx d , x Z }
S1 Con(Q {x R | x1 2 x2 4})
n n S 2 Con(Q) {x R | x1 2 x2 4}
x1 2x2 4
4 3 2 1 1
B
C
S1
2
3
D
4
x1 2x2 4
4
3 2 1 1
B
C
S2 2 3 4
D
由推论7.2.1可以知道, zIP zLD 由两个因素有关: 第一个因素是目标函数中的C,推论7.2.1要求对所 有的C满足S1=S2,但也可能存在某个C使得 zIP zLD 第二个因素是可行解的区域.由上面的图形可知,SI z z 和S2不同,所以存在一个 C, 使得 不为零 , 如 IP LD 8 1 z 28 LD 在例7.2.1中, 达到拉格朗日对偶问 9 ,在 9 题的最优值,其最优解为(4,0); zIP 28 ,其一个最优 解也为(4,0).由此我们可以知道,即使拉格朗日松弛 在某个 下达到的最优解为原问题的可行解,我们 也不能断言 zIP zLD .除非此时 0 .
(1)可行解区域兼容: S S R
(2)目标函数兼容: c x zR ( x),
T
x S
其中, S 为7.1.1的可行域.
例7.1.1 set covering problem 问题描述: 设 A (aij )mn,所有 aij {0,1} ,且每一列对应一 个费用 c j ( j 1n), aij 1 表示第j列覆盖第i行,要求在 最小的费用下选择一些列,使其覆盖所有的行.
拉 格 朗 日 松 弛
LR :
SLR {x Z | Bx d}
n
Z LR ( ) min{cT x T (b Ax)} Bx d(简单约束) , s.t. n x Z .