解耦控制系统设计与仿真
第七章 解耦控制系统
pij 第一放大系数(开环增益) qij 第二放大系数(闭环增益)
2. 相对增益与相对增益矩阵
第一放大系数pij (开环增益) 指耦合系统中,除Uj到Yi通道外,其它通道 全部断开时所得到的Uj到Yi通道的静态增益; 即,调节量 Uj 改变了 Uj 所得到的 Yi 的变化 量 Yi 与 Uj 之比,其它调节量 Uk ( k≠j )均 不变。 pij可表示为:
通过计算过程的微分分别计算出第一放大系数和 第二放大系数,从而得到相对增益矩阵。
另一种方法是增益矩阵计算法
先计算第一放大系数,再由第一放大系数直接计 算第二放大系数,从而得到相对增益矩阵。
2. 相对增益与相对增益矩阵
增益矩阵计算法
即由第一放大系数直接计算第二放大系数。
2. 相对增益与相对增益矩阵
的根所决定。即特征方程的根具有负实部, 两个关联回路是稳定的。
1. 耦合过程及其要解决的问题
通常认为,在一个多变量被控过程中,如果每一个被控
变量只受一个控制变量的影响,则称为无耦合过程,其分 析和设计方法与单变量过程控制系统完全一样。
存在耦合的多变量过程控制系统的分析与设计中需要解决 的主要问题: 1. 如何判断多变量过程的耦合程度? 2. 如何最大限度地减少耦合程度? 3. 在什么情况下必须进行解耦设计,如何设计?
1. 耦合过程及其要解决的问题
稳定性如何判别?
1. 耦合过程及其要解决的问题
当两个回路有关联时,则闭环稳定性由特征方程:
Q(s) [1 G11 (s)Gc1 (s)][1 G22 (s)Gc 2 (s)] G12 (s)G21 (s)Gc1 (s)Gc 2 (s) 0
式中
K 22 h11 K11 K 22 K12 K 21
解耦控制的基本原理

解耦控制的基本原理解耦控制是一种常见的设计原则和方法,它旨在将复杂的系统分解成独立的模块,以降低系统的耦合度,提高可维护性和可扩展性。
本文将从解耦控制的基本原理、实现方法、应用场景等方面进行介绍和分析。
一、解耦控制的基本原理解耦控制的基本原理是通过降低模块之间的依赖程度,使得系统中的各个模块可以独立地进行开发、测试和维护。
具体来说,解耦控制主要包括以下几个方面的原理:1. 模块化设计:将系统划分为多个模块,每个模块负责处理特定的功能或任务。
模块之间通过定义清晰的接口进行通信,而不是直接依赖于具体的实现细节。
2. 松耦合:模块之间的依赖关系应尽量降低,使得修改一个模块不会对其他模块产生影响。
常见的实现方式包括使用接口、回调函数等。
3. 单一职责原则:每个模块应该只负责一个特定的功能或任务,避免一个模块承担过多的责任,以减少模块之间的依赖。
4. 分层架构:将系统划分为多个层次,每个层次负责不同的功能。
上层的模块只依赖于下层模块的接口,而不依赖于具体的实现。
二、解耦控制的实现方法解耦控制的实现方法多种多样,根据具体的应用场景和需求可以选择不同的方法。
以下是一些常用的实现方法:1. 接口隔离原则:定义清晰的接口,每个模块只依赖于自己需要的接口,而不依赖于其他模块不需要的接口。
这样可以避免模块之间的不必要的耦合。
2. 依赖注入:通过将依赖关系的创建和管理交给外部容器来实现解耦。
模块只需要声明自己需要的依赖,由外部容器来负责注入具体的实现对象。
3. 事件驱动:模块之间通过发布-订阅模式进行通信,一个模块发生的事件会被其他模块接收并进行相应的处理。
这样可以实现模块之间的解耦。
4. 消息队列:模块之间通过消息队列进行通信,一个模块将消息发送到队列中,其他模块从队列中获取消息并进行相应的处理。
消息队列可以实现模块之间的异步解耦。
三、解耦控制的应用场景解耦控制在软件开发中有着广泛的应用场景,下面列举几个常见的场景:1. 分布式系统:在分布式系统中,各个节点之间需要进行通信和协作。
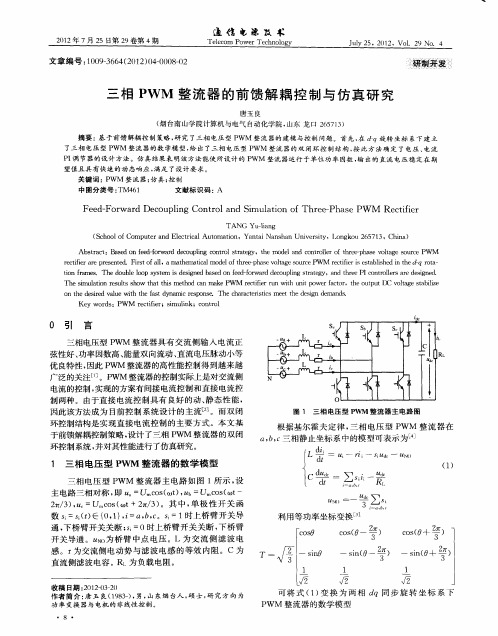
三相PWM整流器的前馈解耦控制与仿真研究
j 研 发 -
.
-
P M 整 流 器 的 前 馈 解 耦 控 制 与 仿 真 研 究 W
唐玉 良
( 台南 山学院计算机与电气 自动化学院 , 烟 山东 龙 口 2 5 1 ) 67 3
摘 要 : 于前 馈 解 耦 控 制 策 略 , 究 了 三相 电压 型 P 基 研 WM 整 流 器 的 建模 与控 制 问题 。 首 先 , 在 g旋 转 坐 标 系 下 建 立
匝 镌 电 冻
2 1 年 7月 2 02 5日第 2 9卷第 Байду номын сангаас 期
— —
】 I :
J l 5,2)2,Vo.2 .4 uy 2 (1 1 9No
Tee o P we c n lg lc m o r Teh oo y
文章 编号 :0 93 6 (0 2 ( ~0 80 1 0 —6 4 2 1 )40 0 —2 )
关 键 词 : WM 整 流 器 ; 真 ; 制 P 仿 控 中 图分 类 号 : TM4 1 6 文 献 标 识 码 :A
F e — o wa d De o p ig Co to n i ua in o r eP a e P M c i e e d F r r c u l n r la dS m lt fTh e - h s W n o Re tf r i
图 1 三 相 电 压 型 P l 整 流 器 主 电 路 图 WV i
根据 基尔霍 夫 定 律 , 相 电压 型 P 三 WM 整 流 器 在 a bC , , 三相静 止坐标 系中的模 型可 表示 为l _ 4 ]
TANG - a g Yu l n i
( c o l fC mp t ra d Elc rc l t ma in,Ya t i n h n Un v r i S h o o o u e n e tia Au o t o n a Na s a i e st y,1o g o 6 7 3,Ch n ) .n k u2 5 1 ia Ab ta t s r c :Ba e n fe -o wa d d o p ig c n r lsr tg ,t e mo e n o tolr o h e - h s o tg o re P M s d o d f r r e u l o to ta e y h d l d c n r l ft re p a e v l e s u c W e n a e a r c i e r r s n e .Fi t f l, t e t a d 1 ft e - h s o tg o r ePWM e t i sa l h h C o a e t i a e p e e td fr r l ama h ma i 1 soa c mo e o e p a ev l es u c h r a rc i e i e t bi e i t ea q r t — frS sd n t n fa s i rme .Th o be lo y tm e in d b s d o e d f r ad d o p ig s r tg ,a d t e Ic n r l r r e i e . o ed u l p s s e i d sg e a e n fe -o r e u l tae y n h eP o t l sa ed s o s w c n r o e n g d Tl i lt n rs l h w h tt i me h d c nt a e PwM e t i u t n t o rfco ,t e o t u 1s e mua i e ut s o t a hs o s t a lk o l rc i e r n wih u i p we t r h u p t fr a DC o tg t bl e v l es a iz a i o h e ie au t h a td n i r s o s n t e d srd v l ewi t e fs y a c e p n e h m Ke r s W M e t ir i l k;c n r l y wo d :P r c i e ;smu i f n o to e c a a t r t sme tt e d s n d ma d h r cei i e h e i e n s sc g
过程控制系统多变量解耦控制系统

过程控制系统多变量解耦控制系统过程控制系统多变量解耦控制系统(Multivariable Decoupling Control System)是一种能够同时控制多个相关变量的控制系统。
在传统的控制系统中,通常只有一个控制回路,而多变量解耦控制系统则可以通过多个回路同时对多个变量进行控制,从而实现变量之间的解耦。
在实际的工程应用中,往往需要控制多个相关的变量。
这些变量之间可能存在交互作用,控制其中一个变量可能会对其他变量产生影响。
传统的单变量控制系统无法有效地解决这个问题,因为它们无法考虑到变量之间的相互关系。
多变量解耦控制系统通过建立多个独立的控制回路,每个回路分别控制一个相关变量,从而实现变量之间的解耦。
解耦的目标是使每个回路的输出变量不再受到其他变量的影响,即通过调整每个回路的控制器参数,使得系统变得稳定并能够达到预期的控制效果。
多变量解耦控制系统的设计一般包括两个主要步骤:解耦器设计和控制器设计。
解耦器的作用是抑制变量之间的相互干扰,从而实现变量的解耦。
解耦器通常根据系统的数学模型来设计,通过调整解耦器的参数,可以实现变量之间的解耦效果。
在解耦器设计的基础上,需要设计每个回路的控制器。
控制器的设计一般采用传统的控制方法,如PID控制器或者先进的控制算法。
控制器的目标是为每个回路选择合适的控制参数,使得系统的稳定性和控制精度得到保证。
多变量解耦控制系统在实际应用中具有广泛的应用。
例如,在化工过程中,需要控制多个过程变量,如温度、压力和流量等。
传统的单变量控制方法无法满足工艺的需求,而多变量解耦控制系统可以通过解耦变量之间的相互作用,实现高效的过程控制。
总之,多变量解耦控制系统是一种用于控制多个相关变量的控制系统。
它通过建立多个独立的控制回路,实现变量之间的解耦,并通过调整控制器参数,使得系统达到稳定和预期的控制效果。
在工程应用中,多变量解耦控制系统具有广泛的应用前景,可以提高工艺的控制精度和稳定性,从而实现更高效的过程控制。
(工业过程控制)10.解耦控制

在系统运行过程中,通过动态调整控制参数或策略,实现耦合的 实时解耦。
解耦控制的方法与策略
状态反馈解耦
通过引入状态反馈控制 器,对系统状态进行实 时监测和调整,实现解
耦。
输入/输出解耦
通过合理设计输入和输 出信号,降低变量之间
的耦合程度。
参数优化解耦
通过对系统参数进行优 化调整,改善耦合状况, 实现更好的解耦效果。
通过线性化模型,利用线性控制理论设计控制器,实现系统 解耦。
非线性解耦控制
针对非线性系统,采用非线性控制方法,如滑模控制、反步 法等,实现系统解耦。
状态反馈与动态补偿解耦控制
状态反馈解耦控制
通过状态反馈技术,将系统状态反馈 到控制器中,实现系统解耦。
动态补偿解耦控制
通过动态补偿器对系统进行补偿,消 除耦合项,实现系统解耦。
特点
解耦控制能够简化系统分析和设计过 程,提高系统的可维护性和可扩展性 ,同时降低系统各部分之间的相互影 响,增强系统的鲁棒性。
解耦控制的重要性
01
02
03
提高系统性能
通过解耦控制,可以减小 系统各部分之间的相互干 扰,提高系统的整体性能。
简化系统设计
解耦控制能够将复杂的系 统分解为若干个独立的子 系统,简化系统的分析和 设计过程。
调试和维护困难
耦合问题增加了系统调试和维护的难度,提高了运营成本。
解耦控制在工业过程控制中的实施
建立数学模型
01
对工业过程进行数学建模,明确各变量之间的耦合关系。
选择合适的解耦策略
02
根据耦合程度和系统特性,选择合适的解耦策略,如状态反馈、
输出反馈等。
控制器设计
03
第八章 解耦控制
3
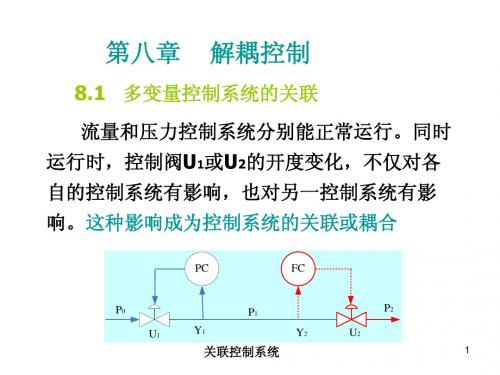
控制系统之间的耦合(关联)程度可用传递函数矩阵表示。 控制系统之间的耦合(关联)程度可用传递函数矩阵表示。
Y( s ) = G ( s ) U( s )
Y1 (s) G 11 (s) G 12 (s) U1 (s) Y (s) = G (s) G (s) U (s) 22 2 21 2
确定各变量之间耦合程度的分析方法有直接法和相对增 确定各变量之间耦合程度的分析方法有直接法和相对增 益法。直接法是采用解析法得到各变量之间的传递函数 益法。直接法是采用解析法得到各变量之间的传递函数 关系,从而确定过程中每个变量相对每个控制作用的耦 关系, 合程度。相对增益法是一种通用的耦合特性分析工具, 合程度。相对增益法是一种通用的耦合特性分析工具, 通过相对增益矩阵,不仅可以确定变量之间的耦合程度, 通过相对增益矩阵,不仅可以确定变量之间的耦合程度, 相对增益矩阵 并且以此去设计解耦控制系统。 并且以此去设计解耦控制系统。
同理
u2
= k11
= k 21,p22 = ∂y2 ∂u2 = k 22
7
p12 =
∂y1 ∂u2
u1
= k12,p21 =
∂y2 ∂u1
u2
u1
第二增益系数 qij 输入 u j 对输出 yi 的第二增益系数指其它控制回路 均为闭环( Y ( s) = 0, k ≠ j ) 该通道的增益,用
k
∂yi qij = ∂u j
17
v22
vn 2
消除和减弱耦合的方法
(1)被控变量(输出变量)与操纵变量(输入变量) )被控变量(输出变量)与操纵变量(输入变量) 间的正确匹配 若相对增益矩阵为单位阵,则表明过程通道之间没 有静态耦合,系统的每一个通道均可以构成单回路控制。 如果控制系统的相对增益矩阵中有一个相对增益
解耦控制decoupling

( p1 p2 ) ( p0 p2 ) ( p0 p1 ) ( p0 p2 )
2
• 如果p1 p2,则I,说明1 h, 2 p1可行
• 如果p1 p0,则11和22 0,而 21和12 1,此时应 重新匹配变量,即1 p1 , 2 h可行 • 如果p1=(p0-p2)/2, ij=0.5,只能解耦
2
ij 在0 1之间,因为 p0 p1 p2
p0 p1 p0 p2 ( p1 p2 ) p0 p1 p1 p2 p0 p1 p0 p2 ( p0 p1 ) 1 0 Λ 回路间不耦合 0 1 0.5 0.5 Λ 耦合最严重 0.5 0.5
r1
-
Kc1 gc1
1
K11 g11
K21 g21
+
+
y1
K12 g12 r2
-
Kc2 gc2
调节器
2
K22 g22
过程
+
+
y2
二.求取相对增益的方法
1.利用相对增益定义(7-4)来计算 例7-1
PC QC
p1
PT DT
h p2 2
p0 1
压力--流量系统的数学描述:
1 2 ( p0 p2 ) h 1 ( p0 p1 ) 2 ( p1 p2 ) (7 6) 1 2 y1 h, y2 p1
(7 12) (7 13)
y2
K12 K 21 K11 K 22 (7 14)
11
p11 K11 K 22 q11 K11 K 22 K12 K 21
依此办理可得12, 21, 22。 由上例可知,只要有Kij就可推得相对增益,是否可以 有更方便的计算方法? 假设有一个矩阵H,它与第二放大系数矩阵Q有如下关 系:
5 第5章 解耦控制

D 11 ( s ) D 22 ( s ) 1
D 12 ( s ) G 11 ( s ) 1 G 21 ( s )
G 12 ( s ) G 22 ( s ) 0
D 12 ( s ) D 21 ( s )
第三节 串接解耦装置的设计
3. 前馈补偿法
只规定对角线以外的元素为零,并且规定某几 个 Dij(s) 为适当的数值
各条通道的传递函数一般不再是原来的Gii(s), 如取某几个 Dij(s) =1 在通道数目不多时,用常规仪表也容易实现, 称之为简化的解耦方案
第三节 串接解耦装置的设计
双通道,取
假设系统 2 闭环后接近理想控制,Y2(s)=0
Y1 ( s ) G 11 ( s ) 0 G 21 ( s ) G 12 ( s ) U 1 ( s ) G 22 ( s ) U 2 ( s )
第一节 系统的关联分析 一.系统的关联
Y1 ( s ) G 11 ( s ) 0 G 21 ( s ) G 12 ( s ) U 1 ( s ) G 22 ( s ) U 2 ( s )
由方程2
G 21 ( s )U 1 ( s ) G 22 ( s )U 2 ( s ) 0
k 11 k 22 k 12 k 21 k 22
11
y1 / u 1 |u y1 / u 1 | y
k 11 k 22 k 11 k 22 k 12 k 21
第一节 系统的关联分析 二.相对增益
2. 相对增益阵
λ11 λ 21