无源探测技术大作业二测向交叉定位方法
基于运动单站的多观测点交叉角无源定位技术

基于运动单站的多观测点交叉角无源定位技术作者:程翔单忠伟来源:《现代电子技术》2015年第18期摘要:针对运动单站采用两个观测点进行无源定位时定位精度差的问题,介绍一种基于运动单站的多观测点交叉无源定位技术。
采用Matlab对多个数量观测点的处理进行仿真与分析,并与两个观测点的效果进行对比。
仿真及对比结果表明,选取的有效观测点数越多,其定位收敛速度、效果越好。
由于其在工程实现上的可行性以及适用的广泛性,该技术具有一定参考价值。
关键词:无源定位;运动单站;交叉角;多观测点;最小二乘法; Matlab仿真中图分类号: TN911⁃34 文献标识码: A 文章编号: 1004⁃373X(2015)18⁃0013⁃03Abstract: Aiming at the poor positioning precision of two observation points in the single moving station in the process of passive location, a passive location technology for crossing angle of multi observation points based on single moving station is introduced in this paper. With Marlab, the processing of multiple observation points is simulated and analyzed, and the effects of two observation points are compared. The results show that the more the effective observation points are adopted, the better effect and faster convergence speed can reach. Moreover the technology has the advantages of feasibility and wide applicability, so it has a high reference value.Keywords: passive location; single moving station; crossing angle; multi observation point; least square method; Matlab simulation0 引言无源定位以其独特的隐蔽优势广泛应用于战场预警、目标跟踪和指示。
测向交叉定位协同信息远程传输方法创新3500字
测向交叉定位协同信息远程传输方法创新3500字被动探测由于具有隐蔽性好、探测距离远、目标识别和抗干扰能力强的特点,能够大大增强水面舰艇在现代海战场复杂电磁环境中的生存力[1?2]。
被动测向交叉定位是较为常用的一种协同定位方法。
研究发现被动传感器的协同距离,也就是基线长度越长,测向交叉定位的精度越高[3?4]。
基线长度主要取决于被动传感器之间的通信作用距离。
目前水面舰艇测向交叉定位所采用的微波协同定位信息传输手段作用距离较近,导致协同定位精度偏低,满足不了武器打击的目指精度要求。
因此,迫切需要一种远程数据传输手段用于舰载被动传感器的测向交叉定位协同信息交换。
2012年12月北斗二代卫星导航系统正式开通,其服务区域覆盖了我国全境、西太平洋及南海广大海域。
北斗系统所独有的短报文通信功能可以实现用户与用户、用户与地面控制中心之间的双向报文通信,作用距离能够跨越北斗系统的整个服务区域。
同时,北斗短报文通信作为一种可靠的远程数据传输手段,目前在通信领域已经得到了广泛的应用[5?8]。
为此,本文提出利用北斗短报文远程通信手段增加基线长度,提高协同定位精度的舰载被动传感器测向交叉定位方案。
本文在简单介绍测向交叉定位工作原理的基础上,依据北斗短报文通信的技术指标对方案进行可行性分析;然后从系统设计、工作流程、通信协议和差错控制四个方面对方案进行详细阐述。
1 测向交叉定位工作原理测向交叉定位工作原理如图1所示。
由图1可以看出,测向交叉定位主要分为以下三个阶段:图1 测向交叉定位工作原理(1)建立通信发起方发送建立通信申请报文,其主要内容为发起方通信地址、时间信息和发起方位置信息。
协同方接收后结合自己位置解算发起方方位距离,并准备发回响应报文。
协同方发送建立通信响应报文,其内容包括时间信息和协同方位置信息,发起方接收后结合自己位置解算协同方方位距离,并确认双方通信建立完毕。
(2)确定定位目标发起方发送协同定位申请报文,其中包含了时间信息、发起方位置信息、协同探测目标批号、目标辐射源载频、脉宽、重复频率信息,协同方接收后确认协同定位目标,准备开始协同定位。
论述一种两站交叉定位算法

论述一种两站交叉定位算法1 概述在电子战环境下,如果雷达受到强自卫式干扰,通常无法测量目标的距离信息,而只能测量目标的角度信息。
雷达组网条件,可利用不小于两部雷达测量干扰源的角度信息,通过解线性方程组,求出干扰源的距离信息。
但由于该线性方程组是一个“超定”方程组,常用的算法是选取其中某些等式求出方程组的解,这些算法没有充分利用方程组的信息,造成精度低和定位盲区。
本文充分利用了方程组所有等式,提出了基于最小二乘法的交叉定位算法,与通常算法相比,算法提高了定位精度和范围。
2 数学建模设站1为交叉定位主站,站2为交叉定位副站,O为雷达组网中心,M为干扰目标。
雷达与目标的位置关系如图1所示。
以O点(雷达组网中心)为坐标原点,建立大地直角坐标系,设站1的坐标为(x1,y1,z1)、站2的坐标为(x2,y2,z2)、目标M的坐标为(xm,ym,zm)、站1与目标之间的距离为R1、站2与目标之间的距离为R2。
站1和站2分别测出干扰源的高低角为ε1、ε2,方位角为β1、β2。
站1和站2的位置、目标相对于站1和站2的角度是已知量,目标的坐标和目标相对于站1、站2的距离为未知量,我们需要通过这些已知量求出目标相对于站1的距离R1。
由图1所示的几何关系我们可以得出:3 常规求解方法3.1 算法1利用公式(1)和公式(3),可求得:3.2 算法2利用公式(1)和公式(2),可求得:3.3 算法3利用公式(2)和公式(3),可求得:4 基于最小二乘法的算法从上述3个算法的求解过程,我们不难发现3个算法均未能充分利用公式(1)~公式(3)的所有等式,存在信息利用不充分的问题。
但若同时联立公式(1)~公式(3)组成方程组,就存在方程个数大于未知数个数的问题,即方程组变成一个“超定”方程组,不能直接求解。
最小二乘法是一种求解此类方程组最常用的方法,它是将各方程平方求和,求出使平方和最小的解作为方程组的解。
将公式(1)~公式(3)组成方程组表示成矩阵形式:5 精度分析5.1 定性分析算法1、算法2和算法3分别未考虑公式(2)、公式(3)和公式(1),而基于最小二乘法的计算公式(8)同时考虑了公式(1)、公式(2)和公式(3),因此,与算法1~算法3相比,基于最小二乘法的公式(8)的计算精度应有所提高。
纯方位无源定位的方法

纯方位无源定位的方法纯方位无源定位方法,是指在无需外部信号源的情况下,通过利用接收器接收到的信号信息,来确定目标物体的位置和方向。
这种定位方法通常应用于无源定位系统,例如无线传感器网络、无人机导航等领域。
纯方位无源定位方法的基本原理是通过接收器接收到的多个信号的到达时间差或相位差来计算目标物体的位置和方向。
常用的纯方位无源定位方法包括时差测量法、相位差测量法和多普勒测量法等。
时差测量法是一种常用的纯方位无源定位方法。
它通过测量目标物体到多个接收器之间的到达时间差来计算目标物体的位置。
当目标物体发射信号时,信号会经过不同路径传播到多个接收器处,由于传播路径不同,信号到达不同接收器的时间会有差异。
通过测量这些时间差,可以计算出目标物体的位置。
相位差测量法是另一种常用的纯方位无源定位方法。
它通过测量目标物体到多个接收器之间的信号相位差来计算目标物体的位置。
当目标物体发射信号时,信号会经过不同路径传播到多个接收器处,由于传播路径不同,信号的相位会发生变化。
通过测量这些相位差,可以计算出目标物体的位置。
多普勒测量法是基于多普勒效应的纯方位无源定位方法。
它通过测量目标物体发射的信号频率与接收器接收到的信号频率之间的差异来计算目标物体的位置。
当目标物体靠近接收器时,信号频率会增加;当目标物体远离接收器时,信号频率会减小。
通过测量这些频率差异,可以计算出目标物体的位置。
纯方位无源定位方法在实际应用中具有广泛的应用前景。
例如,在无线传感器网络中,通过采用纯方位无源定位方法,可以实现对目标物体的位置和方向的实时监测和定位。
在无人机导航中,通过采用纯方位无源定位方法,可以实现对无人机的位置和方向的精确定位和导航。
纯方位无源定位方法是一种无需外部信号源的定位方法,通过利用接收器接收到的信号信息,可以计算目标物体的位置和方向。
这种方法具有简单、实时性强、精度高等优点,在无线传感器网络、无人机导航等领域具有重要的应用价值。
浅谈无线电监测与测向定位技术
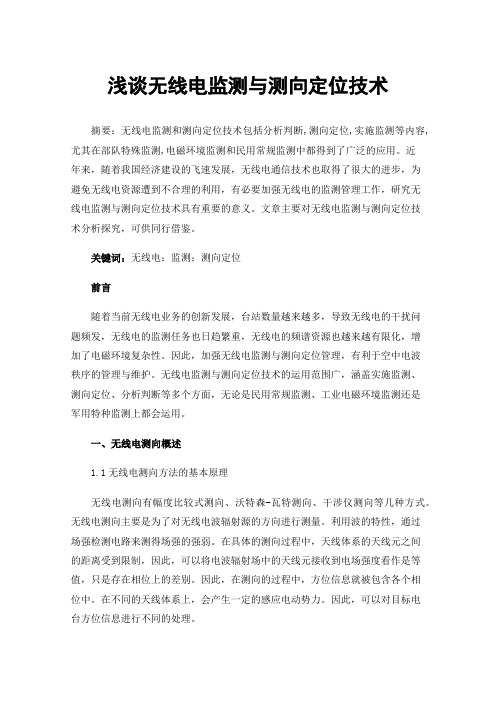
浅谈无线电监测与测向定位技术摘要:无线电监测和测向定位技术包括分析判断,测向定位,实施监测等内容,尤其在部队特殊监测,电磁环境监测和民用常规监测中都得到了广泛的应用。
近年来,随着我国经济建设的飞速发展,无线电通信技术也取得了很大的进步,为避免无线电资源遭到不合理的利用,有必要加强无线电的监测管理工作,研究无线电监测与测向定位技术具有重要的意义。
文章主要对无线电监测与测向定位技术分析探究,可供同行借鉴。
关键词:无线电;监测;测向定位前言随着当前无线电业务的创新发展,台站数量越来越多,导致无线电的干扰问题频发,无线电的监测任务也日趋繁重,无线电的频谱资源也越来越有限化,增加了电磁环境复杂性。
因此,加强无线电监测与测向定位管理,有利于空中电波秩序的管理与维护。
无线电监测与测向定位技术的运用范围广,涵盖实施监测、测向定位、分析判断等多个方面,无论是民用常规监测、工业电磁环境监测还是军用特种监测上都会运用。
一、无线电测向概述1.1无线电测向方法的基本原理无线电测向有幅度比较式测向、沃特森-瓦特测向、干涉仪测向等几种方式。
无线电测向主要是为了对无线电波辐射源的方向进行测量。
利用波的特性,通过场强检测电路来测得场强的强弱。
在具体的测向过程中,天线体系的天线元之间的距离受到限制,因此,可以将电波辐射场中的天线元接收到电场强度看作是等值,只是存在相位上的差别。
因此,在测向的过程中,方位信息就被包含各个相位中。
在不同的天线体系上,会产生一定的感应电动势力。
因此,可以对目标电台方位信息进行不同的处理。
1.2测向技术1.2.1比幅测向法比幅测向法中应用最广泛的是沃特森-瓦特体制,测向时采用计算得出结果或得出反正切值。
该体制的优点是对波道干扰不敏感、测向速度快,易于实现,属于幅度比较式测向方法中的一种,但是该体制测向精度和测向灵敏度低,抗波前失真的能力弱。
因为沃特森-瓦特测向体制所使用的天线阵列是小基础的天线,尺寸较小,所以特别适合手持、车载式的小型测向设备上使用。
基于MVEKF的测向交叉定位跟踪算法

Abstract: In terms of the bearing information measured by two or more stations measuring the same target source of radiation, DOA cross location can be used locate the target source of radiation by using the optimal state estimation. Aimed at the drawbacks that the expanded Kalman filter (EKF) algorithms are seriously affected by the initial value and noise measured, a new modified covariance expanded Kalman filter (MVEKF) algorithm was applied to the DOA cross location for a fixed two stations, which can improve the precision of its convergence and location accuracy. The simulation results show that the algorithm is of better track performances as compared with that of the EKF. Key words: modified covariance expanded Kalman filter (MVEKF); DOA cross location; track algorithm
无线电测向在地质勘探中的应用
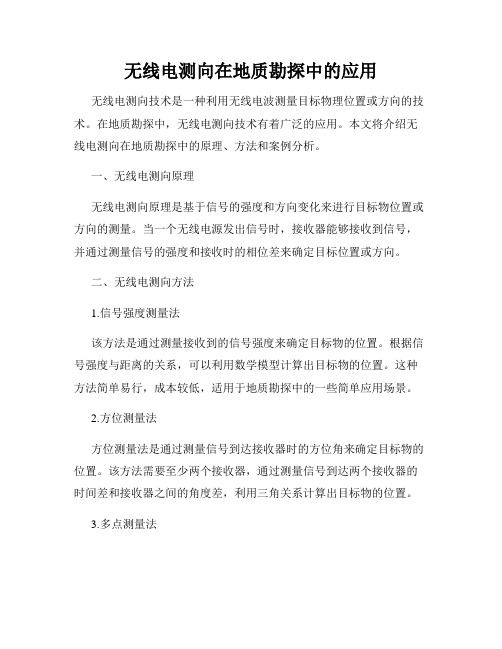
无线电测向在地质勘探中的应用无线电测向技术是一种利用无线电波测量目标物理位置或方向的技术。
在地质勘探中,无线电测向技术有着广泛的应用。
本文将介绍无线电测向在地质勘探中的原理、方法和案例分析。
一、无线电测向原理无线电测向原理是基于信号的强度和方向变化来进行目标物位置或方向的测量。
当一个无线电源发出信号时,接收器能够接收到信号,并通过测量信号的强度和接收时的相位差来确定目标位置或方向。
二、无线电测向方法1.信号强度测量法该方法是通过测量接收到的信号强度来确定目标物的位置。
根据信号强度与距离的关系,可以利用数学模型计算出目标物的位置。
这种方法简单易行,成本较低,适用于地质勘探中的一些简单应用场景。
2.方位测量法方位测量法是通过测量信号到达接收器时的方位角来确定目标物的位置。
该方法需要至少两个接收器,通过测量信号到达两个接收器的时间差和接收器之间的角度差,利用三角关系计算出目标物的位置。
3.多点测量法多点测量法是通过在地面上设置多个接收器,接收目标物发出的信号,并测量接收到的信号参数来确定目标物的位置。
该方法可以提高定位的准确度和覆盖范围,适用于复杂地质环境中的勘探任务。
三、无线电测向在地质勘探中的应用案例1.矿产资源勘探无线电测向技术在矿产资源勘探中得到了广泛应用。
通过在地下埋设接收器网络,接收地下矿石发出的信号,可以确定矿石的位置和储量。
这对于矿区开发和资源利用具有重要意义。
2.地质灾害预警无线电测向技术可以用于地质灾害预警,如地震、滑坡等。
通过在受灾地区部署接收器网络,监测地下信号的变化,可以提前判断地质灾害的发生概率和规模,为救援和防灾工作提供重要依据。
3.地下水资源勘探无线电测向技术可以用于地下水资源的勘探和评估。
通过在地下埋设接收器网络,接收地下水发出的信号,可以确定地下水的分布和储量。
这对于水源保护和水资源管理具有重要意义。
4.地下管线检测无线电测向技术可以用于地下管线的检测和维护。
通过在地下埋设接收器网络,接收管道发出的信号,可以确定管道的位置和状态。
交叉定位原理范文

交叉定位原理范文
GPS卫星定位技术的出现,极大地改变了我们的生活。
GPS卫星定位系统利用16至20颗卫星来测定用户的位置,以准确定位一个地点,已经广泛应用到我们的日常生活中。
GPS卫星定位系统的主要原理是,利用时间差定位原理,也叫交叉定位原理,它的工作原理是,用户的GPS接收机接收从不同的GPS卫星发射的电磁波,从而利用时间差(即时间差定位)来确定用户的位置。
GPS卫星定位系统的原理是,GPS接收机接收来自GPS卫星的信号,接收机将自身的空间坐标(位置信息)反馈给GPS卫星,同时接收卫星发出的信号。
在接收机收到回信号时,接收机将检索出发信号的时间差,然后根据接收到信号的两个位置,算出所需的行车距离和定位距离,最后运算准确的空间坐标。
GPS卫星定位系统通过计算接收到信号的时间差来实现定位。
当GPS 接收机接收到从多个GPS卫星发出的信号时,它会根据这些信号接收的时间差,来计算出接收机的具体位置。
这种利用时间差定位的方法,也被称为交叉定位原理,在GPS定位中,一般只要接收到四颗GPS卫星的信号,就可以定位接收机的位置。
由此可见,GPS卫星定位系统是一种非常有效的定位系统,利用时间差定位原理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无源探测技术作业
主讲老师:成萍
作者
无源探测技术中测向交叉定位方法原理及应用
1、无源探测技术简介
现代化战争是高科技的战争。
为了在战争中彻底准确摧毁敌方有生力量,瓦解敌方的战斗体系,保障我方部属安全,就需要知道敌方的准确位置。
于是,定位技术成为现代战争体系中一项必不可少的关键技术,作为电子对抗的重要组成部分,一直受到人们的关注。
所谓定位是指,由单个或多个分布式的有源或无源探测器,通过探测目标(散射体或辐射体)反射或发射的信号,分析信号中的数据和有关参数,应用合适的数据处理方法,估计出目标在空间中的位置。
通常,按探测器种类划分,定位可分为有源和无源两大类。
有源定位指探测器自身要发射电磁波,通过接收目标的反射波和相关信息进行定位,其中最主要的就是雷达对抗技术。
从最近几次高科技局部战争来看,针对传统雷达的电子干扰和抗干扰斗争愈发激烈,参战单位更注重隐身,反辐射导弹成为新宠,同时低空突防技术也获得更大发展。
这些都使得传统雷达探测定位技术面临的障碍不断增加,使人们意识到必须发展新的定位技术。
无源定位因此深受青睐,其发展速度一直呈上升趋势。
所谓无源定位就是指,探测器自身不发射电磁波,仅利用目标本身辐射或散射第三方辐射波进行定位。
相对于有源定位,其具有隐蔽性和反电子侦察能力强的突出优点,从而成为现代战争中机载对敌、对海攻击以及对付隐身目标的远程预警系统的重要组成部分,大大提高了战斗系统在电子战环境下的生存能力和作战能力。
相对于传统的有源定位系统,无源定位系统有以下四大优点:
1、最大的优点在于工作时本身不发射电磁能量,具有良好的隐蔽性,能有效地抵抗反辐射导弹和反侦察定位系统,生命力强,适应环境快。
2、无源定位技术与收发分置的双基或多基雷达系统类似,且工作在甚高频和超高频,因此能更有效地对隐身目标进行探测定位。
3、无源雷达系统自身不发射信号,省去了昂贵的高功率发射机和收发开关及相关电子设备,使系统制造和维护成本大幅降低。
当前,世界上一些国家在新型功率器件方面对我国采取禁运的手段,因此此项优点对我国情况有很大吸引力。
4、外辐射源的天线都设置在贴近地面的高处,因此对低空飞行的飞机和巡航导弹有利,具有良好的抗低空突防性能。
2、测向交叉定位方法的原理
2.1测向交叉定位方法简介
用无源定位的方法获取辐射源的位置信息是现代雷达系统的一项重要任务,测向交叉定位方法是无源定位中应用最多的一种。
测向交叉定位方法又称三角定位法,在二维或三维空间上经过射线交叉测定目标位置,是无源定位中使用最多的一种定位方法。
通过移动机载或地面单站的移动,在不同位置多次测量方位,利用方位线的交会进行定位,或者通过空载或地面固定多站的测角系统所测得的指向线交会进行定位。
测向交叉定位系统具有全方位、快速、探测距离较远、在受到干扰的情况下仍能正常工作等优点,是目前无源定位方法中发展较早、研究较为成熟、应用较为广泛的一种无源定位技术。
俄罗斯、以色列、美国和捷克等国都已有相应军事应用。
2.2二维交叉定位算法原理及误差分析
无源定位显然不限定于平面问题。
即使侦察点和目标辐射源都在地面,如果问题所涉及的地域达到几百公里,那么地球的曲率也将成为必须考虑的因素。
但是,当目标辐射源以超低空飞行,或者目标飞行高度只有探测距离的百分之一以下时,可以把这种情况近似为平面问题,引入二维定位算法,这时误差比人们想象的要小。
在二维交叉定位中,各雷达站通过高精度的测向设备获得辐射源的方位角。
根据两个雷达站之间的相对位置和目标辐射源的方位角就可用二线交叉定位演算出目标的二维方位坐标。
为了提高定位的精度,可采用多站布局,在此文中以二站布局说明二维交叉定位方法的原理。
两条射线的交叉定位,使用两部雷达建立一条测量基线,如图1所示。
设主基地雷达站O的坐标(0,0),可测量雷达站A(,)到O的距离L,以及A相对于O的方位角。
M为目标辐射源位置,M(,Y)为其坐标。
其中和为雷达测向所探测的目标方位角。
由简单的数学推导和三角关系可得出A(,)和M(,Y)的关系。
(1)
(2)其中,
(3)
图1 二维测向交叉定位原理图
测向交叉定位的基础是各观测站实现对目标辐射源的精确测向。
受天线接收波束宽度的限制,传统雷达测向精度为,所以当目标距离较远时,定位精度较差。
如图2所示。
图2中、为O,A两观测站对目标M的无源探测方向,虚线为测向精度。
当目标在四边形EFGH中任意一点分布时,都会被定位在M点。
如果测角精度较大或目标较远,四边形EFGH范围较大,目标定位误差较大。
图2 测向精度对定位的影响
定位误差与参数、、、的测量误差、、、有关。
对式(2)求微分可得:
(4)
(5)假设各项测量误差相互独立且服从零均值的高斯分布,即。
记,。
当测量误差较小时,可以近似地用代替式(4)、式(5)中的d,有
(6)
(7)
(8)
所以定位精度GDOP(Geometric Dilution of Precision)为
(9)2.3双基地三维空间定位算法及误差分析
假定条件如下:
(1)目标距离侦察站较远,暂不考虑地球曲率的影响;
(2)每个测量站的测量结果都相互独立,互不相关;
(3)各测量误差均是0均值、不相关的高斯白噪声;
(4)站址各分量的测量误差之间以及与其他测量误差之间都是相互独立的,并且具有相同的方差值。
设一个双基地系统,对辐射源进行三维测向交叉定位的示意图如图3所示。
图3 三维测向交叉定位方法原理图
分析图3中的几何关系,根据三角关系可得如下方程:
(10)
= (11)
(12)其中,
(13)根据式(11)、(12)、(13)、(14)可以得到方程组:
(14)可简记为:
(15)
求解方程组即可得目标的坐标:
(16)下面进行三维交叉定位算法的误差分析。
首先,得到目标与布站位置相关的系数矩阵:
(17)定位误差协方差矩阵:
(18)则得到定位精度的几何稀释为:
(19)3、测向交叉定位方法的军事应用
测向交叉定位系统具有全方位、快速、探测距离较远、在受到干扰的情况下仍能正常工作等优点,是目前无源定位方法中发展较早、研究较为成熟、应用较为广泛的一种无源定位技术,国外已有多种无源探测系统,下面列举几例典型的采用交叉定位体制的无缘探测系统:
(1)塔马拉-B(TAMARA-B)无源探测系统。
由前华约集团和捷克研制,主要用于对空中、海上及陆地目标定位和目标信号特性检测,可作为预警探测系统和侦察系统。
塔马拉系统由3个测量站:中心站、左站及右站组成,通过测量到达时间差对目标进行二维定位。
下一代为维拉无源雷达系统。
(2)EL/L8300G电子支援系统。
以色列研制的地基被动式电子支援系统,用于对空监视和空中侦察。
系统采用三站测向交叉定位体制。
(3)洛克希德.马丁公司最近研制的“静默哨兵”无源定位系统。
它利用FM广播信号作为照射源探测跟踪飞机和导弹,可在125mile~136mile的距离上观测到10m2的目标。
(4)俄罗斯的BETA85 B2-A三坐标电子情报站,采用三站测向交叉定位体制。
(5)维拉(VERA-E)无源雷达系统。
由捷克ERA公司研制,是捷克上一代无源监视系统“塔玛拉”的后继产品,而在“塔玛拉”系统之前,捷克在上个世纪60年代和70年代还分别研制过“科帕奇”和“拉莫那”系统。
维拉无源雷达系统是一种可移动的用于对空中、地面和海上目标进行定位、识别和跟踪的电子情报和无源监视系统。
它可以提供迄今为止只有有源雷达才能提供的功能。
维拉无源雷达系统是一种可探测隐
身飞机之系统,曾在科索沃战争击落美国F-117隐身攻击机过程中发挥了作用。
F-117于2008年退役,取而代之的是F-22。
4、测向交叉定位方法展望
与有源定位相比,无源定位具有较突出的优点,是未来探测定位的发展方向。
测向交叉定位接收机及信号处理相对比较简单,传统有源雷达的接收机及信号处理设备经改造可以完成无缘探测任务,便于对传统雷达进行组网。
测向交叉定位采用窄波束搜索式测向,天线增益高,探测距离远。
而且多站信号的相互匹配比其他无源定位方法容易实现。
对测向交叉定位精度进行研究,使交叉定位在实现时能尽可能避免误差,提高定位精度。
无源测向交叉定位在最近几次战争中发挥的作用使我国开始重视无源雷达系统的研究,并自主研发了DWL002被动探测雷达系统等系统。
伴随着攻击战机、反辐射导弹等进攻武器的不断发展,性能不断提高,无源测向交叉定位系统的性能也将不断提高,并将在未来战争的反隐身、反突防等领域发挥显著的作用。