感应电机无速度传感器直接转矩控制的智能优化设计
新型无传感器感应电动机直接转矩控制系统
第3 4卷
第 5期
新 型 无 传 感 器 感 应 电 动 机 直 接 转 矩 控 制 系统
万 军 , 吕值 敏
( 重 庆 科创 职 业学 院机 电工 程 学 院 ,重 庆 永川 4 0 2 1 6 0 )
[ 摘
要] 针对 电机 安装机 械传 感 器不便 的 问题 提 出 了新 的速 度 辨识 方 法. 从 自适 应控 制 原理
证和 比较.
到 的 电压 、 电 流信 号 计 算 为 电机 的 磁 链 和转 矩 ,
通过 B a n g—b a n g控 制 , 实 现 磁 链 和 转 矩 的 直 接
1 异 步 电动 机 数 学模 型
在 一 坐标 系下 , 感应 电机 的定 子 电流 、 磁 链、 转子 转速 方程 可 以描 述 为 :
优 于 EK F.
[ 关键 词 ] 感应 电动机 ; 直接 转 矩控 制 ; 参 数估 算 ; MA R S ; E K F
[ 中图分 类号 ] T M3 4 6 [ 文献标 志码 ] A [ 文章编 号 ] 1 6 7 3— 8 0 0 4 ( 2 0 1 5 ) 0 5— 0 0 5 0— 0 5 直接转 矩 控 制 ( D T C) 是继 矢 量 控 制 后 发 展 起 来 的新 型交 流调速 控制 方法 , 它 采用 空 间 电压 矢量( S V C ) 方法 , 直 接在 定 子坐 标 系下 将检 测 得 提 出一种新 型 的速度估 计方 法 , 并 在相 同条 件下 , 对I M的 D T C中两 种不 同的非线 性传 感器 进行 验
1
一 一
控制. 它摒 弃 了矢 量 控 制 中复 杂 的 解 耦 计算 , 其 优 点是 有快 速 的转矩 响应 和 良好 的动态 性 能 , 但
基于智能算法的无速度传感器直接转矩控制系统的设计
下面采用完全递归神经网络来构造转速辨识器
假设 0为 电机 转 子 磁链 矢 量 与 a轴之 间 的
22 递 归神经 网络速 度辨识器 的设计 .
0 at ̄%1 =r ng c a
非 线性 映射关 系
6( ) ( 0 足 =f , , J 。6 ( , 壶一1 ) 0 )
( 1 1)
霞
式 中 T =L / 为转子 时间常 数 . R
瞬 时 电角 度 , 则
L1 m … I
这种非线性映射关系可以用递归神经网络实现 . 递归神经网络具有较强的表达和处理瞬态信息 的能力 , 适于解决非线性动态辨识与控制问题。
维普资讯
第2 1卷
第 4期
沈
阳
化
工
学
院
学
报
V 12 N o. 1 o4 Dc20 e 0 7
20 .2 0 7 1
J OUR NAL OF S EN NG TI UT EMI AL T CH H YA I NS T E OFCH C E NOL X Y (3
文 章 编 号 : 10 —4 3 (0 70 —0 0 —0 0 4 6 92 0 )4 3 3 7
基 于 智能算 法 的 无速 度传 感器 直 接转 矩控 制 系统 的设 计
李 彬 , 樊立萍
( 沈阳化工学 院 信息工程学 院,辽宁 沈阳 10 4 ) 1 12
摘 要 : 为 了 改善 定 子 电 阻对 定 子 磁 链 的 影 响 以 及 电机 的 低 速 性 能 , 出一 种 利 用 模 糊 神 经 网 提
L
0
0
L
式 中 : … i 分别 为定 子 a轴 的电压 和电流 ; “ a s “ 口 s 为定子 卢轴 的 电压 和 电流 ; 分别
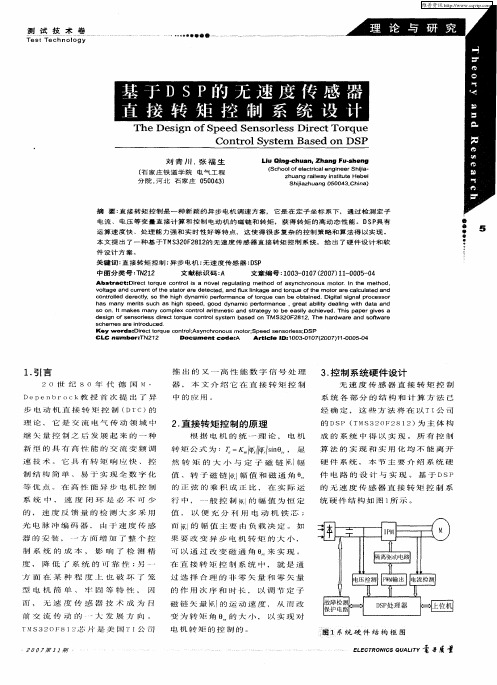
基于DSP的无速度传感器直接转矩控制系统设计
( 家庄铁 道 学院 石 分院. 北 河 石家庄 电 气 工 程 004 ) 5 0 3
Li ng c u QJ - hua Zh n, ang F s u. hen g
( h o f lc r a n i e r ia Sc o l e t c l g n e j — oe i e Sh i
系 统 中 , 速 度 闭 环 是 必 不 可 少
2 直 接 转 矩 控 制 的原 理 ,
本文提 出 了一种基 于T 3 02 1 的无速 度传 感器直 接 转矩 控制 系统, 给 出了硬件 设计 和软 HS 2 F 8 2 件 设计 方案 。 关 键 词 : 接 转 矩 控 制 : 步 电 机 ; 速 度 传 感 器 ; S 直 异 无 DP
中 图 分 类 号 :N 1 T2 2
謦
豢
掌
t
电 流 、 电压 等 变 量 直 接 计 算 和 控 制 电 动 机 的 磁 链 和 转 矩 , 获 得 转 矩 的 高 动 态 性 能 。 D 具 有 SP 运 算 速 度 快 、 处 理 能 力 强 和 实 时 性 好 等 特 点 , 这 使 得 很 多 复 杂 的 控 制 策 略 和 算 法 得 以实 现 。
文 献 标 识 码 : A
文章 编 号 : 0 3 0 0 ( 0 7 1 — 0 5 0 10- 1 720 )10 0-4
A bst ract= r t t que Diec or con r i novel egul i m et t ol s a r atng hod of as ync onou m ot .I he m e hod, hr s or n t t v t olage and cur en ft t or ar r t o he s at e det ed,and fu l age and t que o he m ot e c cu at ect x i l nk or ft orar al l ed and
一种改进的异步电机无速度传感器的直接转矩控制系统
关键 词 :直接转矩控制 异步电动机 磁链辨识 模型参考 自适应系统 模 糊控制
[ 中图分类号]T 4 [ M33 文献标志码 ]A [ 文章编号]10 3 8 (0 2 0 0 1 3 00— 86 2 1 )4- 03—0
An I r v d Id c i n Mo o e d S n o ls r c r u n r l s e mp o e n u t t rSp e e s r s Di tTo q e Co to o e e Sy t m
c nr le o rdu e t Ipa a ee so h pe d nc n t y t m a a tr o i o e t e o a e o he whoe c n r l o tol rt e c he P rm t r ft e de n e e o he s se p r mee s t mprv he p r r nc ft f m l o to
() 3
(响应迅速 , 是一种具有高静 、 动态性 能
的交流调速方法 。在高性能 的 D C中, T 转速 的闭环控制环 节
一
般是必不 可少 的。通 常采用光 电编码 器等速度 传感器 来进 行
电磁转矩方程 :
Li +Li , ,
转 速检测 , 但速度传感器 的使用增加 了系统 的安装 难度及 成本 。 本 文用一种新 的磁链 观测方案 观测定子磁链 , 并将其作为参考 模型, 构成新 的模 型参考 自适 应 系统 M A ( d l e rneA R S Moe R f ec . e d p v yt , 以在全速度范围 内准确辨识速度 , at eSs m) 可 i e 同时用模 糊 速度调节器代替传统 P 调节器 , I 进一步 改善 了直接转 矩控 制 在全速范围 内的性能 , 尤其是极低速 的性能 。
无速度传感器的PMSM最优转矩控制系统研究
( a ut fE e t cl& C n r l n ie r g i nn c nc l i ri ,Hu u a 2 1 5 hn ) F c l o l r a y ci o to E gn e i ,L a ig Teh i v s y n o a Un e t l d o 1 5 0 .C ia
传统 上多 采用 光电编 码器或 旋转 变压器 等机 械传 感器 , 不仅增 大 了 电机 的体积 和成本 , 不适应 恶 且 劣 的工作环 境 , 电机 易受干 扰 。 目前 , 使 电机控 制
系统 中机械 传感器 的存 在阻碍 了电机 向高速化 和
小型 化发展 。因此 , 传 感器 技 术 的研 究 在 高 速 无
Abs r c :Fora no — p e ~ e or s s e m o e ,t e PM SM ta t n s e d s ns y t m d l h mod la he o tma o q o r s e nd t p i lt r ue c ntoli a ple p id.W e b l uid a mod lr f r nc efa a i on r le o e tma e t e s e d a oston Bot e e e e e s l— d ptve c t o l r t s i t h p e nd p ii . h t t o y nd i u a i r s ls h w t t he o r le i fe b e n wih h s tsa t y he he r a sm l ton e u t s o ha t c nt o l r s lxi l a d t t e a if c or
直接转矩变结构控制的无速度传感器交流感应电机系统
薰
~
一
( 1 N o r t h w e s t e r n P o l y t e e h n i e a l U n i v e r s i t y, Xi a n 7 1 0 0 7 2, C h i n a ; 2 Xi a n Ae r o n a u t i e a l U n i v e r s i t y , X i a l l 7 1 0 0 7 2, C h i n a )
高精度控制要求。状态观测器是无速度传感器交流 褐 感应 电机控制策 略的重要组 成部分 , 其鲁棒 性和观
测 误差直接影响电机 的控制性能 。文献 [ 7 ] 针对感
应 电机提出全阶 自 适应 磁链 、 定子 电阻观测器 , 但其 连
运 算相对复杂 , 观测误 差较 大。文献 [ 8 ] 提出了速 度 自适应 滑模观 测器 , 该观测器 不需要确 切的 电机
謦彗 宴
一
2 0 1 4 萋 4 2 差 曼 鞠
一 m
一R n1 0
驱 动控制
/
= ,.
≈
R n
一 m R 2
R n 。
0 一 R 3
0 ]
R 。
1
(
。
s
—L c o s 日
)
} ( 1 4)
¨ _
m 一 m
_ , _( J L 一 m s i n 日 r ) l
= 0 , 则 =一 m ) 一 R J
一
一
_ 耄 Ⅲ _ 一 雪 l 山 0 匕 e - ㈦ j _ ㈣ 亘 m ~ 协 一
基于滑模观测器的感应电机无速度传感器直接转矩控制

基于滑模观测器的感应电机无速度传感器直接转矩控制孙振兴;张兴华【摘要】提出了一种定子磁链滑模观测器,该观测器以定子电流和磁链作为状态变量,利用电流观测误差时定子磁链观测值进行校正,采用李雅普诺夫理论证明了观测器是渐近收敛的.设计了基于定子磁链滑模观测器的感应电机无速度传感器的直接转矩控制系统,将磁链估计值用于对转速进行实时估计.实验结果表明,采用滑模观测器的感应电机无速度传感器直接转矩控制系统,具有转矩动态响应快,转速控制精度高和调速范围宽的特点.%In this paper, a novel sliding-mode observer for stator flux estimation is proposed. This observer employs stator currents and flux as the state variables, and uses the error of the stator current estimation to adjust the flux observer. The convergence of the observer is proved by Lyapunov's stability theory. Then, a speed sensor-less direct torque control system of induction motor drives based on the sliding-mode flux observer is designed, which uses the slip frequency method to calculate the speed on real time. The experimental results show that the proposed the control scheme possesses the features of fast torque response, accurate speed tracking and wide range of speed.【期刊名称】《电工电能新技术》【年(卷),期】2012(031)004【总页数】5页(P29-33)【关键词】感应电机;直接转矩控制;滑模观测器;无速度传感器【作者】孙振兴;张兴华【作者单位】南京工业大学自动化与电气工程学院,江苏南京210009;南京工业大学自动化与电气工程学院,江苏南京210009【正文语种】中文【中图分类】TM346定子磁链的准确估计是感应电机无速度传感器直接转矩控制获得高性能的关键。
无速度传感器异步电动机直接转矩控制
文 章 编 号 : 0 18 6 ( 0 6 0—0 10 1 0—3 0 20 )504 — 5
无速 度传 感器异步 电动机直接转 矩控制
尚 敬 ,刘 可 安
( 洲 电力 机 车 研究 所 研 发 中心 ,湖 南 株 洲 株 摘 420) 10 1
要 : 析 了速 度 传 感 器 在 机 车 运 行 中故 障 率 较 高 从 而 导 致 牵 引 传 动 控 制 设 备 可 靠 性 降 低 的 现 状 , 绍 了无 分 介
究 。试 验 结 果 表 明 , 系 统 具 有 优 异 的 性 能 。最 后 分 析 了影 响转 速 辨 识 精 度 和 实 际 应 用 的 2个关 键 问 题 : 变 器 该 逆 死 区效 应 及 补偿 方 法 ; 速 再 生 区稳 定运 行 。 低
关 键 词 : 速 度 传 感 器 技 术 ; 步 电动 机 ;直 接 转 矩 控 制 无 异
速 度 传 感 器 技 术 应 用 于 轨 道 牵 引传 动 系 统 的 优 点 。 在 异 步 电 动 机 r型 等 效 电 路 模 型 基 础 上 , 建 L e b re 构 un eg r自 适 应 状 态 观 测 器 , 到 状 态 偏 差 的方 程 。通 过 李 亚 普 诺 夫 稳 定 性 理论 , 导 出一 种 无 速 度 传 感 器 控 制 的 速 度 自适 得 推 应 辨 识 算 法 。在 TMS 2C 1和 T 3 0 2 0构 成 的 双 微 机 控 制平 台 上 , 提 出 的 无 速 度 传 感 器 控 制 算 法 进 行 30 3 MS 2 F 4 对 了全 数 字 化 实现 , 用 大 功 率 I B 利 G T牵 引逆 变 器 和 异 步 牵 引 电动 机 对 无 速 度 传 感 器 直 接 转 矩 控 制 进 行 了试 验 研
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
直 接 转 矩 控 制 ( i c T ru ot l D C) D r t oq e C nr , T e o
高 , 需要 大量 离线 训 练 。本 文 在 综 合 考 虑 D C 且 T 系统 性 能要 求 后 , 设计 了在 线 自整 定模 糊 神经 P I 控制 器 , 实现 了对 感应 电机 D C低 速 时 系统 性 能 T 的改 善 。
I t li e n e l nt Optm i a i n sg f I uc i n M o o r c g i z to De i n o nd to t r Di e t To qu n r lwiho p e n o l s r e Co t o t ut S e d Se s re s
c y,sai ha a t rsi . Sm u ain e ulss we ha n elg n pi z to e i n ma e r c o q o r ls s ttc c r ce itc i lto r s t ho d t tit lie to tmiai n d sg k sdie ttr ue c nto y — tm bvo l mpr v d p ro ma c e a o iusy i o e e fr n e, b te o u t s nd sl- d p ie et rr b sne sa efa a tv .
其 中: y为实 际转 速输 出 ,, 期望 转 速输 出。 l为 那 么误 差信 号将 由第 四层 向第 一层 一 次反传 。
( )解 模糊 层 : 1
=
o , 6l
= l 一y= e ,
() 6
=
警=
=
( 7 )
图 2 F N P 控制框 图 N —I
e = ・ ,Biblioteka = n£ y e () 3 此 层共 有 4 9个 节点 。 ( )解模 糊 化层 : 4
图 1 D C原 理 框 图 T
∑ i , nt O ̄ = e )i j 4 Y j 4
i 1 =
L, () 4
2 模 糊神经 网络 一 I 节器 P调
从 降低 系统成 本 , 需安 装 的角 度 出发 , 速 无 无
由于其结 构 简单 、 系统 动态 响应 速度 快等 特点 , 被
广泛 应用 在 交 流 调 速 系统 中 。传 统 D C 系统 都 T
是采 用 P 控 制器进 行 转速 调节 的 , I 该算 法 具 有简 单方便 、 可靠 性高 等优 点 , 却 需要 大量 试验 反复 但 调 速 , 且得 到 的参数 也 比较粗 糙 , 而 容易 引发 系统 在低 速运 行 时控 制精 度欠 缺 、 矩脉 动大 的问题 。 转 基 于模 糊 控 制 的 D C方 法 , 模 糊 自适 应 P 调 T 用 I 节器 代替 常规 P 调节 器 J可 以抑 制 转 矩 脉 动 , I ,
f
然后 用 B 法 来 修 正 F N 的 可 调 参 数 , P N
( :1 2 8 ,n 和 ( =1 2 =1 2 Z ,…9 ) / i ,, , …7 。 )
定 义指 标 函数 为
优化 , 其结构图如图 2所示 。
E= (—, =1 ÷ y l 了 ) e
( 5 )
其 中 :=123 … ,9 i , ,, 4 。
( )规则 层 : 2
在 F N模 块 中 , 和 分 别 为 实 际转 速 与 N 给 定转 速 之 间 的误差 A , 其 变 化 率 d n &, n及 a / 这
=
舞 ・ ( 8 )
—a E a , ,
— —_ ———
迫 札 与控 制 应 用 21, 1 ) 01 8(2 3
控制与应用技术 E 帅强
感 应 电 机 无 速 度 传 感 器 直 接 转 矩 控 制 的 智 能 优 化 设 计
王 宝忠 , 要 丹 , 孙 健涛 ( 苏科技 大学 , 苏 镇 江 江 江
摘
22 0 ) 1 0 3
要 : 一些 特定作业环境 中, 要对 电机转速进行精确调控 。为 了改善直 接转 矩控 制系统低 速时常 在 需
速 变化 。感 应 电机 D C原 理 图如 图 1所示 。 T
y :。p 删 2 , ( )
() 2
(i Jj
其 中 ,t r 和 分 别 是 第 i 输 入 变 量 的 第 r 个
个 模糊 集 合 的高斯 型 函数 的隶 属 函数 的均值 和 标
准差 , 们 都 是 F N 的 可 调 参 数 。 此 层 共 有 1 它 N 4 个节 点 。 ( )规 则层 : 3
规 P 调节器带来 的转 速脉动 , I 设计 了基 于模糊 神经 网络 的新 型 P 调 节器 , I 改进后 的转 速调节器 具有快 速 自 整定 、 超调的特性 。针对 MA S转速观测器低速时 的不稳定性 , 微 R 设计 了基于人 工神经 网络的模型参 考 自适 应速度观测器 , 改进后的转速观测器具有 良好 的动 、 静态特性 。仿真结果表 明 : 智能优化设计使得直接转矩控 制系统的控制效果 明显提高 , 且有更好 的鲁棒性 和 自适应 性。
Abs r t n s me s e ilwo kig e v r me ,t e s e fmo o h u d bec n r le a c aey. I r rt t ac :I o p c a r n n ion nt h pe d o t rs o l o told c urt l n ode o r d c n oo p e i l us d by g n r lr g l tro ie ttr e c n rls se i o s e d,a n w e u a e u i g r trs e d rpp eca e e e a e u ao fd r c oqu o to y tm n lw p e e PIr g l ・
凡e
2
: ,
() 1
其 中 , 就是 F N的第 i 输入 ,=12 N 个 i ,。此
给定值 进 行 滞环 比较 , 后 经 由开关 状 态 表选 择 然 出合 适 的空 间 电压 矢 量 作 用 于逆 变 器 , 过 逆 变 通 器 开关 的不 断切 换 , 现 电机转 矩 、 实 磁链 按要 求 快
度传 感器 成 为 了当今 的研 究 热 点 。其 中 , 为 常 最 见 的是 MA S 速 辨识 法 J 而该 方 法 在 低 速 时 R 转 , 性 能不稳 定 , 这里 设 计 了基 于 双层 线 性 神 经 网 故 络的 M R A S速度 辨 识器 。
利用 MA L B2 0 b Sm l k提供 的模 块建 T A 0 9 / i ui n
t rb s d o u z e r ln t r a e in d, n h d f d s e d r g ltr h sf s s r r g lt g o a e n f zy n u a ewo k w sd sg e a d t e mo i e p e e u ao a a t e -e u ai ,mir v r i f n coo e mo u a in c a a t r t .Ai n ti r vn h t bl y o d lt h r ce i i o sc mig a mp o ig t e sa i t fMARS s e d o s r e o p e ,a mo e ee e c i p e b e v ri l w s e d d lrf r n e n s e d a a t e o s r e a e n a t c a n u a n t o k wa e in d n h d f d o s r e a o d t n e — p e — d p i b e v rb s d o ri il e r l ew r sd s e ,a d t e mo i e b e v r h sg o e d n v i f g i
控制 与应用技术 E C MA
迫 币 与楦 芾J 田 21, 1 ) 乙 应 0] 8(2 3
1 D C 原 理 T
D C_ 是 采 用 定 子 磁 链 定 向 和 空 问 矢 量 概 T l
输入, 表示第k 第 y Y 层的 个节点的输出, Y 即y =
删 , F N各 层 的处 理过 程 可表示 如 下 。 则 N
W NG B oz o g, A a —h n 0 Da S N in to n, U Ja — a
(i guU ie i f c nea dT cn l y h ni g 0 3 hn ) J n s nvr t o i c n eh oo ,Z e j n 1 0 ,C ia a sy S e g a 2 2
里为 和 在模糊论域 { 6 一 , 2 0 2 4 一 , 4 一 ,,,, 6 上各 定义 7个模 糊 集 合 , 有 4 } 共 9条 规 则 , 入 输
( )输入 层 : 1
念 , 过检 测 定 子 电压 、 通 电流 , 接 在 静 止 坐 标 系 直
下观 测 电机 的磁 链 、 转矩 , 将 此观 测值 与 相应 的 并
n) √ i , n) e = =, = e t y t 1
层 有两 个 节点 。 ( )隶属 函数层 : 2
关 键 词 :感 应 电机 :直 接 转 矩 控 制 ;智 能控 制 ;自适 应 调 节 器 ; 速 度 传 感 器 无 中图 分 类 号 :T 0 . : M 3 6 文 献 标 志 码 : 文 章 编 号 :6 36 4 (0 1 1 -0 70 M 3 12 T 4 A 17 - 0 2 1 )2 2 -5 5 0
立仿 真平 台 , 感 应 电机 D C系 统 进 行 了研 究 , 对 T 并将 智 能优化 后 的 D C系 统 与传 统 D C系 统进 T T 行 比较 , 验证 了智 能算法 的有 效性 。