信号指纹定位算法
室内WIFI定位算法设计与性能评估

Lorem ipsum dolor sit amet, consectetuer adipiscing
e(lit. A3e)nea加n co权mmKo最do li近gula邻eg法et d(olorW. LoKreNmNip)sum
dolor sit amet, consectetuer adipiscing elit.
eget dolor. Lorem ipsum dolor sit amet, consectetuer adipiscing elit.
离的原理;有采用提前在地板上步骤压力传感器,通过启动压力传感器捕获地板上人 的脚步信息,利用传感器接收的数据进行步行者的识别或位置跟踪的技术原理。
除此之外,基于WLAN的室内定位技术也受到了更多的关注,其原理是利用接收 信号强度RSSI与空间物理位置的映射关系来进行定位,由于其并不需要过多昂贵复杂 的硬件设备而能够最大限度的节省定位系统的成本,受到了大量研究所和高校的重点 研究。
4
国内外研究概况
Research Situation At Home And Abroad
对于室内定位技术,国内外的众多研究所和高校等都有大量的研究,先后也出现
国了很内多外专研门的究室概内况定位系统。比较早的有采用测量超声波传播来确定信号传播距离的
原Lor理em;ips有um采dol用or s射it a频me识t, c别ons(ectRetFuIeDr )adip技isc术ing,elit通. Ae过ne测an c量om信mo号do强ligu度la 衰减情况来计算信号传播距
-83
-1
1.53275E+12
SZU_WLAN
60:da:83:88:7c:30
-61
基于WiFi技术室内定位系统设计
基于WiFi技术室内定位系统设计【摘要】本文主要探讨了基于WiFi技术的室内定位系统设计。
首先介绍了研究背景和研究意义,指出了WiFi定位技术在室内定位领域的重要性。
接着详细介绍了WiFi定位技术的原理和室内定位系统设计原则。
然后深入讨论了基于WiFi技术的室内定位算法,包括定位精度和稳定性等方面。
在实验设计与结果分析部分,对系统的性能进行了评估和优化。
最后探讨了基于WiFi技术室内定位系统设计的实际应用,并展望了未来的发展方向。
通过本文的研究,可以更好地了解和利用基于WiFi技术的室内定位系统,为室内定位技术的进一步发展提供参考。
【关键词】关键词:WiFi技术、室内定位系统、定位算法、实验设计、系统性能优化、实际应用、未来发展方向。
1. 引言1.1 研究背景近年来,随着无线网络技术的不断发展和普及,WiFi技术已经成为人们日常生活中不可或缺的一部分。
通过WiFi技术,用户可以方便地接入互联网,进行信息传输和共享。
随着对室内定位需求的增加,基于WiFi技术的室内定位系统逐渐引起了人们的关注和研究。
传统的室内定位系统往往需要额外的硬件设备,而基于WiFi技术的室内定位系统则可以利用已有的WiFi网络设备,减少了成本和部署的复杂度。
当前基于WiFi技术的室内定位系统在定位精度、系统稳定性和用户体验等方面仍存在一些挑战和问题,例如信号干扰、多径效应等。
进一步完善和优化基于WiFi技术的室内定位系统成为了当前研究的重要方向。
本研究旨在通过对WiFi定位技术的深入研究和分析,设计和实现一套高精度、高稳定性的基于WiFi技术的室内定位系统,为室内定位技术的发展和应用提供新的思路和方法。
本研究也将探讨基于WiFi技术的室内定位系统在实际应用中的潜在价值和未来发展方向。
1.2 研究意义室内定位系统在现代社会中具有广泛的应用价值和发展前景。
随着人们对定位精度和实时性的需求不断增加,基于WiFi技术的室内定位系统设计成为一种可行的解决方案。
基于距离的定位算法
基于距离的定位算法是一种利用物体之间的距离信息来确定其相对位置的算法。
它通常用于定位和导航系统,无线传感器网络以及其他需要确定物体位置的领域。
基于距离的定位算法的实现通常依赖于以下几种技术:
1. 三角测量法:在三角测量法中,使用至少三个已知位置的参考点和物体与这些参考点之间的距离信息,通过三角计算来确定物体的位置。
这可以通过测量到参考点的信号到达时间、信号强度或者其他传感器测量的信息来实现。
2.指纹定位法:指纹定位法基于建立预先测量的物理信号指纹(如Wi-Fi信号强度、蓝牙信号、RFID信号等)与位置之间的映射关系。
在定位时,通过收集目标物体处的信号指纹并与预先建立的指纹数据库进行匹配,以确定物体的位置。
3.超声波定位法:超声波定位法是利用超声波传感器测量物体与参考点之间的距离来确定物体的位置。
通过测量超声波的传播时间或反射强度,可以计算出物体与参考点之间的距离,并进而确定物体的位置。
4.RFID定位法:RFID(射频识别)定位法利用RFID技术对物体进行识别和定位。
通过在物体上附着RFID标签,并在参考点或周围部署RFID读写器,可以实时读取物体与参考点之间的距离或相对位置,从而实现物体的定位。
这些方法在应用中各有优缺点,具体选择何种方法取决于所需的精度、成本、场景等因素。
实际应用中通常会结合多种定位技术,以提高定位的准确性和可靠性。
同时,对于室内定位、室外定位以及不同尺度的定位需求,可能存在适用的算法和技术的差异。
基于RSS空间线性相关的WLAN位置指纹定位算法

基于RSS空间线性相关的WLAN位置指纹定位算法徐小良;高健;黄河;马哲【摘要】Due to RSS time-varying and difference of signal receiving ability of different terminals,the performance of RSS-based technologies is usually instability.In order to solve such problem,a novel fingerprint localization algorithm based on linear spatial dependence of RSS was proposed.Multiple sets of RSS samples were collected at each reference point to form a feature matrix and an offline location fingerprint database was conducted.When the real-time RSS matrix was used to calculate the correlation between the real-time RSS matrix and the reference point of the fingerprint library,the k-reference points were obtained,and the final position of the user was calculated by the quadratic weighted centroid algorithm.In order to effectively reduce the influence of signal time-varying,the sampling and sorting process were carried out,and the number of sampling times increased as much as possible when constructing the offline fingerprint database,but the samples needed to be aggregated to fit the positioning correlation calculation.Experiment results show that the proposed algorithm can guarantee the high positioning accuracy and also achieve the better stability for different terminal.%针对RSS(接收信号强度)时变性以及不同终端信号接收能力的差异性,导致WLAN位置指纹定位不稳定的问题,基于RSS空间线性相关性提出一种新颖的位置指纹定位算法.在每个参考点分别采集多组RSS样本形成特征矩阵,并构建离线位置指纹数据库.定位时,通过计算实时RSS矩阵与指纹库参考点相关性,得到最相关的k个参考点,利用二次加权质心算法计算用户的最终位置.为了有效降低信号时变性的影响,采样时进行了滤波、排序等处理,构建离线指纹数据库时尽量增加采样次数,但需要对样本进行聚合处理以适应定位相关性计算.实验结果表明,该算法在保证较高定位准确度的同时,针对不同终端有更好的定位稳定性.【期刊名称】《电信科学》【年(卷),期】2017(033)003【总页数】8页(P14-21)【关键词】室内定位;位置指纹;线性相关;加权质心算法【作者】徐小良;高健;黄河;马哲【作者单位】杭州电子科技大学计算机学院,浙江杭州310018;杭州电子科技大学计算机学院,浙江杭州310018;中浙信科技咨询有限公司,浙江杭州310007;中浙信科技咨询有限公司,浙江杭州310007【正文语种】中文【中图分类】TN911随着无线网络的广泛普及和移动智能终端的迅猛发展,室内定位受到越来越多的关注。
wifiscan定位原理
wifiscan定位原理Wifiscan定位是一种将无线网络信号作为定位依据的技术方法。
其基本原理是通过扫描周围的Wi-Fi信号,获取其信号强弱以及其他相关信息,然后将这些信息与事先收集到的无线网络信号强度数据库进行匹配和计算,从而确定用户设备的位置。
Wifiscan定位主要包括如下几个步骤:1.Wi-Fi信号扫描:用户设备(如手机、电脑等)通过无线网卡接收到周围的Wi-Fi信号,然后利用扫描算法对周围的Wi-Fi热点进行扫描,获取其散发的信号信息。
2. 信号指纹提取:对每个扫描到的Wi-Fi热点进行信号指纹提取,包括信号强度(RSSI)、信道号(Channel)、MAC地址(BSSID)等信息。
这些信息构成了该Wi-Fi点的信号指纹,用来与事先收集到的信号指纹数据库做匹配。
3.信号指纹匹配:将提取到的信号指纹与预先建立的信号指纹数据库进行匹配与比对。
数据库中记录了不同位置下的Wi-Fi信号指纹和相应的坐标信息。
4. 定位计算:根据信号指纹匹配的结果和对应的坐标信息,利用定位算法计算出用户设备的位置。
常用的定位算法包括最近邻算法(Nearest Neighbor Algorithm)、贝叶斯定位算法(Bayesian Localization Algorithm)等。
需要注意的是,Wifiscan定位依赖于事先收集到的Wi-Fi信号强度数据库。
为了建立这个数据库,需要在整个定位区域内进行信号采样,以获取不同位置下的Wi-Fi信号指纹。
在采样过程中,需要记录下每个采样点的坐标信息和相应的Wi-Fi信号指纹。
Wifiscan定位有一些优点和挑战:优点:1.无需额外硬件:Wi-Fi扫描定位不需要额外的硬件设备,只需要利用设备自带的Wi-Fi模块,因此相对简单且成本较低。
2.覆盖范围广:Wi-Fi信号通常有较大的覆盖范围,可以在室内和室外等各种环境中实现定位。
3.可扩展性强:Wi-Fi信号指纹数据库可以通过不断采集新的数据进行更新和扩展,以提高定位的准确性。
WiFi信号定位算法研究与实现

WiFi信号定位算法研究与实现随着无线通信技术的不断发展,WiFi已经成为人们生活中不可或缺的一部分。
在现代社会中,人们对WiFi信号的覆盖和稳定性有着越来越高的要求。
然而,在现实环境中,由于建筑物、障碍物以及各种干扰因素的存在,WiFi信号的强度和传播特性会受到一定程度的影响。
因此,WiFi信号定位算法的研究和实现成为了解决这一问题的重要方法之一。
WiFi信号定位算法旨在通过对WiFi信号的测量和分析,确定接收设备所处的位置。
在研究和实现WiFi信号定位算法时,我们需要考虑以下几个关键问题:信号采集、定位模型、定位算法和实验效果评估。
首先,信号采集是WiFi信号定位算法中的基础环节。
为了完成WiFi信号定位任务,我们需要先收集一定数量和范围的WiFi信号。
常用的信号采集方法有穿越点法和传统点法。
穿越点法是通过将接收设备在建筑物内移动,记录不同位置的WiFi信号强度,以建立信号强度与位置之间的映射关系。
传统点法则是在已知位置处收集WiFi信号数据,从而得到信号强度与位置之间的对应关系。
接下来,定位模型的选择对于WiFi信号定位算法的准确性起着重要作用。
常见的WiFi定位模型包括信号强度衰减模型和指纹匹配模型。
信号强度衰减模型假设信号强度与距离成反比关系,通过测量WiFi信号的强度来推断设备位置。
而指纹匹配模型则是将WiFi信号强度作为特征,与预先采集的指纹库中的数据进行匹配,从而确定设备的位置。
在选择定位模型之后,我们可以使用各种不同的定位算法来实现WiFi信号定位。
常见的定位算法包括最近邻算法、加权最近邻算法、贝叶斯定位算法等。
最近邻算法是最简单的定位算法,它通过计算接收设备与参考点之间的距离来确定设备的位置。
加权最近邻算法在最近邻算法的基础上引入了权重因子,通过考虑不同参考点的贡献度来提高定位的准确性。
贝叶斯定位算法则是根据贝叶斯定理,将WiFi信号强度与先验概率相结合,从而得到设备位置的概率分布。
几种常见的定位方式对比
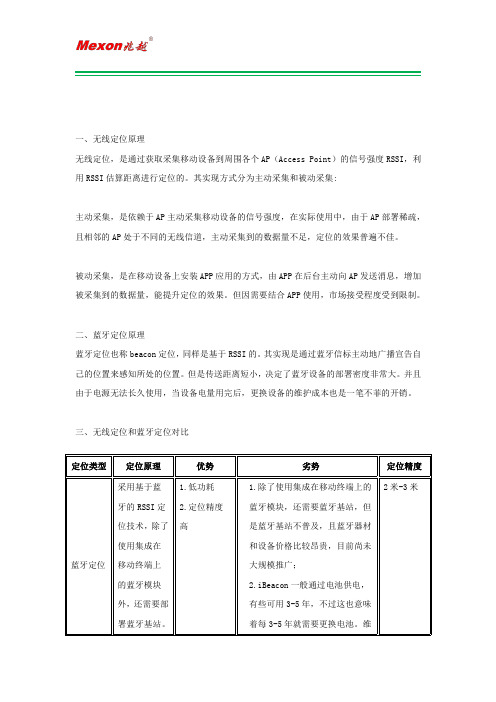
一、无线定位原理无线定位,是通过获取采集移动设备到周围各个AP(Access Point)的信号强度RSSI,利用RSSI估算距离进行定位的。
其实现方式分为主动采集和被动采集:主动采集,是依赖于AP主动采集移动设备的信号强度,在实际使用中,由于AP部署稀疏,且相邻的AP处于不同的无线信道,主动采集到的数据量不足,定位的效果普遍不佳。
被动采集,是在移动设备上安装APP应用的方式,由APP在后台主动向AP发送消息,增加被采集到的数据量,能提升定位的效果。
但因需要结合APP使用,市场接受程度受到限制。
二、蓝牙定位原理蓝牙定位也称beacon定位,同样是基于RSSI的。
其实现是通过蓝牙信标主动地广播宣告自己的位置来感知所处的位置。
但是传送距离短小,决定了蓝牙设备的部署密度非常大。
并且由于电源无法长久使用,当设备电量用完后,更换设备的维护成本也是一笔不菲的开销。
三、无线定位和蓝牙定位对比定位类型定位原理优势劣势定位精度蓝牙定位采用基于蓝牙的RSSI定位技术,除了使用集成在移动终端上的蓝牙模块外,还需要部署蓝牙基站。
1.低功耗2.定位精度高1.除了使用集成在移动终端上的蓝牙模块,还需要蓝牙基站,但是蓝牙基站不普及,且蓝牙器材和设备价格比较昂贵,目前尚未大规模推广;2.iBeacon一般通过电池供电,有些可用3-5年,不过这也意味着每3-5年就需要更换电池。
维2米-3米三、基于RSSI 定位原理的定位算法就定位的算法而言,目前基于RSSI 定位主要有二个算法:三角定位算法,指纹识别算法。
1、三角定位算法:如果我们已经知道了这些AP 的位置,我们可以利用信号RSSI 衰减模型估算出移动设备距离各个AP 的距离,然后根据智能机到周围AP 距离画圆。
在实际使用中,只要知道被搜寻设备与周围三个点的距离,就可以依此画出三个圆圈,而三个圆圈的交会位置,便是设备的位置。
定位的过程可分成两个阶段:测距与定位。
①测距阶段:待测点首先接收来自三个不同已知位置WIFI 接入点的RSS,然后依照无线信号的传输损耗模型将其转换成待测目标到相应WIFI 接入点的距离。
基于Zigbee室内定位系统的指纹库优化算法
得到 良好 的定位效果 ,但指纹数据库 的采集和建立精度会直接影响到最终的定位精度,而一般方法建立的指纹数据库误差较大。
为 此 ,通过 对 Z i g b e e网络 指纹 数据 库采 集和 建立 过程 进行 研 究 ,提 出一 种 Z i g b e e网络 中指纹 数据 库采集 、建 立及 优化 的算 法 。在 定位 区域 将各 采样 点采 集 到 的指纹 数据库 源 数据 进行 滤波 处 理 ,建立 高精 度 的指纹 数据 库 。利 用 Z i g b e e 平 台组 建无 线 网络进 行实 验 ,分别 使 用针 对该 定位 系 统提 出 的 限定 区域最 邻近 算 法 、限 定 区域加权 最 邻近 算 法 、限定 区 域贝 叶斯 算法 进行 定位 计 算 。实验 结果表 明 ,运 用优 化 后的指 纹数 据库 在短 距 离范 围 内定位 平均 误差 可 限制在 1 . 5 m以内。
中图分类号: T P 1 8
基于 Z i g b e e室 内定位 系统 的指 纹库优化 算法
刘小康 ,郭
摘
杭
( 南 昌大 学信 息工 程学 院 ,南 昌 3 3 0 0 3 1 )
要 :Z i g b e e 无线传感器网络的接收信号强度指示( R S S I ) 可以用来提供位置服务,使用 R S S I 建立指纹数据库设计定位算法能够
s e r v i c e .Us i n g RSS I e s t a bl i s hi n g f in g e r pr i n t d a t a b a s e t o d e s i g n po s i t i o ni ng a l g o r i t h m c a n ge t go o d po s i t i o ni n g r e s ul t .Bu t in f ge pr r i n t d a t a ba s e c ol l e c t i o n a nd e s t a bl i s hme n t a c c ra u c y d i r e c t l y a fe c t t he p os i t i o n i n g a c c u r a c y.Th e g e n e r a l me t h od t o e s t a bl i s h t h e ing f e r pr i n t da t a b a s e h a s l a r g e r e r r o r ,a nd a te f r r e s e a r c h i n g or f t h e p r oc e s s o f Zi g b e e n e t wo r k i f ng e pr r i n t d a t a b as e c ol l e c t i o n a n d e s t a b l i s h me n t ,t h e ing f e pr r i n t da t a ba s e c o l l e c t i o n,e s t a bl i s h me nt a n d o p t i mi z a t i on me t ho d i s p r o po s e d.I n t h e p os i t i o ni n g a r e a ,a l l t he c o l l e c t e d in f ge r pr in t d a t a ba s e s o u r c e d a t a f r o m e v e r y s a mp l i n g p oi n t a r e il f t e r e d ,a nd hi g h p r e c i s i o n i f ng e r p r i n t da t a ba s e i s e s t a b l i s he d. Us i n g t he d e in f e d r e g i o n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
信号指纹定位算法:
利用事先已经测好的先验指纹信息进行定位的算法,指纹信息的建立和利用指纹信息进行定位时都只需要简单的硬件即可实现。
信号指纹定位算法利用了复杂环境的多径效应,可以在NLOS环境下进行精确定位,算法本身不需要硬件的额外支持,依靠已经建立好的离线数据库,只要在接收端获得超宽带信号对应的信息,即可得到定位结果。
根据定位阶段匹配函数的不同,信号指纹定位算法一般可以分为确定性的定位算法、概率性的定位算法和神经网络法三类。
确定性定位算法是利用已有的信号指纹推算出目标节点的位置信息。
基于概率的定位算法是通过条件概率为指纹建立模型,然后通过贝叶斯法则来推算出目标节点的位置信息;
神经网络法是一种最有效反映非线性输入-输出映射的方法。
定位过程:
一、建立指纹数据库;
二、训练(整理)指纹数据库;
三、利用实时测得的信号和已有的指纹信息进行定位。
指纹定位算法中,主要有两种方法可以进行TOA的估计:
一、基于匹配滤波的的相关接收技术。
匹配滤波是最佳滤波的一种,当输入信号具有某种特殊波形时,其输出达到最大,对信号的匹配滤波相当于对信号进行自相关运算。
此时,接收机具有较高的采样速率,精度较高。
利用发射信号的模板与接收信号进行互相关即可得到精度较高的TOA估计,但是受到Nyquist采样定理的限制,使得其很难匹配接收到的众多的多径分量;匹配滤波必须具有接收信号的先验信息(模板信号),但是,此模板信号在不同的环境下是不同的,甚至受到多径的影响而不同。
所以此法,在环境复杂的室内环境或NLOS环境下不适用。
二、基于能量探测的接收技术。
是一种低采样速率、低复杂度的接收技术,是一种非相关(Non-coherent)的TOA估计技术,通常采用适当的门限与接收信号比较,选择最先超过门限的能量块作为TOA估计值。