导引头稳定平台线性隔离度及其提高方法
船舶稳定平台解决方案

船舶稳定平台解决方案陀螺稳定平台〔gyroscope-stabilized platform〕利用陀螺仪特性保持平台台体方位稳定的装置。
简称陀螺平台、惯性平台。
用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。
它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。
稳定平台作为一种安放在运动物体上的设备,具有隔离运动物体扰动的功能。
稳定平台在航空航天、工业控制、军用及商用船舶中都有比拟广泛的用途,例如航拍、舰载导弹发射台、船载卫星接收天线等。
船舶上工作面或者平台姿态检测,船载天线稳定平台系统,会应用倾角传感器定时〔较长时间〕读取数值,通过计算后,对稳定平台进展校正。
平台的实际运动由单片机控制外部机械装置以到达对稳定水平平台进展修正,以保证其始终处于水平状态。
某些倾角传感器作为船体液压调平系统中的反响元件,提供高精度的倾角信号。
既可用于水下钻进也可用于水下开采等。
在国外,陀螺稳定跟踪装置被广泛应用于地基、车载、舰载、机载、弹载以及各种航天设备中。
20世纪40年代末,为了减少车体振动对行进间射击的影响,在坦克上开场安装火炮稳定器,从50年代起,双稳定器在坦克中得到了广泛的应用。
在英、美等国的先进武器系统中,基于微惯性传感器的稳定跟踪平台得到了广泛的应用,如美国的M1坦克、英国“挑战者〞坦克、俄罗斯T-82坦克、英国“标枪〞导弹海上发射平台和“海枭〞船用红外跟踪稳定平台等,都采用了不同类型的稳定跟踪平台。
美国海军采用BEI电子公司生产的QRS-10型石英音叉陀螺,研制出WSC-6型卫星通讯系统的舰载天线稳定系统,工作12万小时尚未出现故障;Honeywell公司以红外传感器平台稳定为应用背景,研制的以GG1320环形激光陀螺为根底的惯性姿态控制装置,很好的满足了稳瞄跟踪系统的要求。
美军配装的Honeywell公司采用激光陀螺技术研制的自行榴弹炮组件式方位位置惯性系统(MAPS6000) ,在工作时可连续提供高精度的方位基准、高程、纵摇、横摇、角速率、经度和纬度输出,性能大大高于美军MAPS系统标准的要求。
干扰条件下提高主动导引头目标截获能力的措施
干扰条件下提高主动导引头目标截获能力的措施
一、介绍
主动导引头作为一种能够有效地准确捕获并捕捉头目标的精确制导设备,在现代社会中广泛应用于军事、航空航天、机器视觉以及其他领域。
然而,在现实环境中,头目标多样性丰富,加上各种各样的干扰因素,给主动导引头的截获能力带来很大的挑战,降低了截获的准确率。
因此,提高主动导引头目标截获能力,在现代社会中有着越来越重要的意义。
二、研究方法
提高主动导引头目标截获能力的方法有多种,包括:
(1)利用拓扑自适应聚类技术
拓扑自适应聚类技术是一种由拓扑学知识派生而来的聚类方法。
它可以根据头目标和环境干扰的形状、大小和结构差异来聚类。
利用这一技术可以有效地识别出头目标和环境干扰的噪声,从而提高主动导引头的截获能力和准确率。
(2)运用改进的卡尔曼滤波算法
卡尔曼滤波算法是一种采用线性度量和状态估计方法来获得推测值的算法。
为了提高主动导引头的截获能力,可以运用一种改进的卡尔曼滤波算法,它可以有效地过滤掉头目标和环境干扰的噪声,并能够更准确地定位不同的目标。
(3)使用多探测器方法
多探测器方法是指采用多个探测器同时进行探测。
平台导引头隔离度特性研究
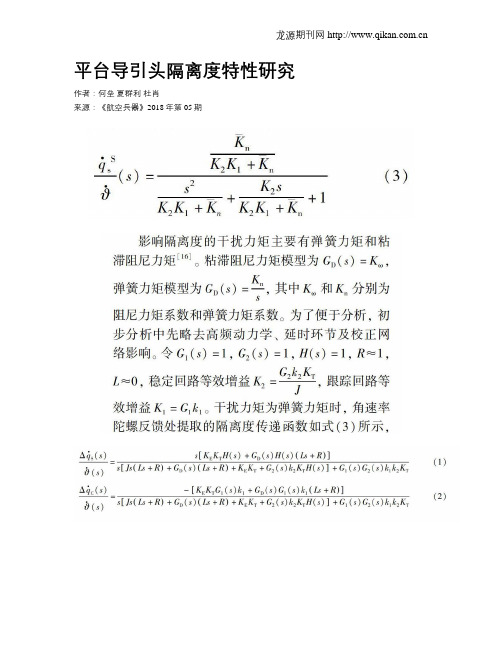
平台导引头隔离度特性研究作者:何垒夏群利杜肖来源:《航空兵器》2018年第05期摘要:为了研究平台导引头在不同视线角速度提取方式下的隔离度特性,建立了基于惯性基准的典型平台导引头隔离度模型和隔离度寄生回路模型,分析了噪声对不同视线角速度提取的影响,推导出了干扰力矩下不同提取方式的隔离度傳递函数,利用无量纲化方法和劳斯判据分析了隔离度寄生回路稳定性。
研究表明:不同视线角速度提取点对不同噪声敏感度不同,制导系统参数、干扰力矩类型和视线角速度提取方式均会对隔离度寄生回路稳定性造成影响,在导引头不同主要干扰因素下选择合理的视线角速度提取方式有助于提高制导系统性能。
关键词:平台导引头; 阻尼力矩; 弹簧力矩; 隔离度; 视线角速度提取; 稳定性中图分类号:TJ765.3 文献标识码:A 文章编号: 1673-5048(2018)05-0041-06[SQ0]0 引言导引头是导弹系统关键部件之一[1],平台导引头的主要功能是完成对目标的搜索、识别和跟踪,为了保证导引头的测量和跟踪精度,要求稳定平台对弹体的扰动具有很好的隔离作用[2]。
隔离度是导引头的重要性能指标,表征了导引头隔离弹体扰动的能力,直接关系到导弹的制导精度[3]。
常用的平台导引头隔离度模型有基于惯性基准和基于弹体基准两种[4],其主要区别为平台转动角速度是相对于惯性空间还是相对于弹体。
目前,国内外许多学者[5-9]采用基于弹体基准的隔离度模型进行分析。
吴晔[10]和崔莹莹等[11]对基于惯性基准和基于弹体基准的隔离度完成了建模和分析,发现在低频时两种模型差距较小,随着频率的增加两种模型特性差异较大。
王志伟[12]、张盈华[13]和李富贵[14]等学者对非线性的干扰力矩进行分析和简化建模,并基于简化模型对隔离度特性进行分析。
但上述研究只是将隔离度简化为一个常数,并没有体现隔离度传递函数的特性。
目前的工艺水平可以保证导引头稳定回路具有较高的增益,从而使得稳定回路指令和角速率陀螺输出的信号动态响应基本一致,认为两处提取的弹目视线角速度差别不大。
导引头稳定平台控制回路设计分析

s e d o i h n l n e o p i g a d t e r q ie n o o t o y tm r n f rf n to r n l z d p e n sg ta g ea d d e u ln n h e ur me tf rc n r ls s e t a s e u c i n we e a a y e .Th n l — ea ay s sl y t e r t o n a in f rmo o u p tt r u n y o r n e s l ci n a d d sg f o t o y tm r n f rf n — e a h o e i f u d t o t ro t u o q ea d g r a g e e to n e i n o n r ls se t a s e u e c o c
图[ , 1 主要 由稳定 和跟 踪两 回路组 成 。稳 定 回路 3
是 内 回 路 , 常 采 用 速 率 陀 螺 反 馈 , 可 以 敏 感 常 它
头与一 般伺 服 系 统 的 主 要 区别 就 是 在 跟 随 目标 的 同时要 隔离 载 体 扰 动 对 导 引头 产 生 的视 线 角
弹体 姿态 扰动 的角 速度 , 使稳 定平 台朝 弹体姿 态 扰 动的 相反方 向运 动 , 以隔 离 弹体 的扰 动 。跟踪 回路是外 回路 , 中 目标 探测 和 角度 鉴 别经 常有 其 多种形 式 , 如激 光 、 图像 、 米波 及 各种形 式 的复 毫
ton The d g t lsm u a i ys e wa it b s d o he a l e . The dgia i u a in e u ts ow s e t rde ou— i . i ia i l ton s t m s bu l a e n t nays s i t ls m l to r s l h b te c pin s a hiv d i i n i g i c e e n sghta gulr s e d out t a p e pu . K e wor s: e ke ; d c pln y d s e r e ou i g; sg ngu a p e I AE Is t m i hta lr s e d;T I yse
自抗扰算法在导引头光电稳瞄系统中的应用雷海丽

自抗扰算法在导引头光电稳瞄系统中的应用雷海丽发布时间:2021-08-10T03:26:58.843Z 来源:《中国科技人才》2021年第12期作者:雷海丽宋亚民严宁乔志峰[导读] 自抗扰控制算法能实时估计并补偿伺服系统在运行过程中受到的各种外界干扰和内部干扰,解决了现代控制理论中依赖数学模型的问题。
将其应用到导引头的伺服控制中,可以解决导引头建模不确定性、探测器输出及传感器测量噪声多方面误差因素的影响,提高导引头的伺服性能,增强对外界扰动的隔离性能。
雷海丽宋亚民严宁乔志峰西安应用光学研究所陕西西安 710065摘要:自抗扰控制算法能实时估计并补偿伺服系统在运行过程中受到的各种外界干扰和内部干扰,解决了现代控制理论中依赖数学模型的问题。
将其应用到导引头的伺服控制中,可以解决导引头建模不确定性、探测器输出及传感器测量噪声多方面误差因素的影响,提高导引头的伺服性能,增强对外界扰动的隔离性能。
关键词:自抗扰;隔离度;伺服性能引言:导引头是精确制导武器的核心部件,其伺服机构是实现视轴稳定和目标跟踪的执行装置,其性能直接影响导引头的制导精度。
作为复杂的光、机电一体化装置,导引头伺服机构的研制涉及光学工程、惯性技术、机械工程及控制工程等多个学科领域,其控制性能受到陀螺随机误差、模型不确定性、干扰力矩、跟踪器滞后及多采样率等多方面误差因素的影响。
现有的伺服机构研制大都将其作为一个独立的机电装置,很少从整个制导系统的角度去进行研究,所采用的测控方法多为经典的信号处理与控制方法。
随着精确制导武器装备的发展,对导引头伺服机构的性能要求越来越高,稳定跟踪精度指标不断提高,采用传统的设计方法尤其是经典测控方法己很难实现这一目标,应用现代先进测控理论与技术来提高机构的控制性能显得尤为迫切。
1. ADRC控制系统概述现代控制理论提出了许多控制算法,但这些算法大多以精准的数学模型为前提,而在工程实际中要得到控制系统准确的数学模型,几乎是不可能的,这成为了现代控制论应用的一大瓶颈。
基于跟踪微分器的导引头半捷联稳定系统半实物仿真研究
第27卷第2期2009年3月北京工商大学学报(自然科学版)Journal of Beijing Technology and Business University (Natural Science Edition )Vol 127No 12Mar.2009 文章编号:167121513(2009)022*******基于跟踪微分器的导引头半捷联稳定系统半实物仿真研究赵 刚, 郭 华, 杨树兴(北京理工大学宇航科学技术学院,北京100081)摘 要:为计算平台惯性角速度,将跟踪微分器应用到导引头半捷联稳定系统中.介绍了跟踪微分器原理,对基于跟踪微分器的导引头半捷联稳定系统进行了数字仿真和半实物仿真,仿真结果表明导引头半捷联稳定系统的稳定性能随弹体扰动频率升高而降低,典型弹体扰动下半捷联稳定系统的稳定性能满足指标要求.关键词:跟踪微分器;半捷联稳定;导引头;半实物仿真中图分类号:T J 76513 文献标识码:A收稿日期:2008-11-03作者简介:赵 刚(1967—),男,四川成都人,博士研究生,研究方向为飞行器设计;郭 华(1958—),男,吉林敦化人,高级工程师,博士研究生,研究方向为飞行器设计;杨树兴(1962—),男,河北唐山人,教授,博士生导师,主要从事飞行器方面的设计研究. 为了减小体积和降低成本,速率陀螺稳定导引头有向半捷联稳定导引头发展的趋势.与速率陀螺稳定导引头相比,半捷联稳定导引头的稳定平台上去掉了速率陀螺,因此失去了直接测量平台惯性角速度的能力[1].为实现平台稳定,可以采用角位置补偿和角速度补偿两种方法.其中,角速度补偿法是速率陀螺稳定平台的一种替代方法,即用弹体角速度与框架角速度测量的合成来替代原来由速率陀螺完成的测速功能,这种方案算法简单,而且可以直接提取视线角速度.但具体实现过程中,如何完成平台的方位和俯仰跟踪角速度反馈是个难题,一般可以通过测速机或数值微分来获得,但是在测量噪声较大的情况下,将给框架速度环引入微分噪声[1].跟踪微分器(tracking differentiator ,TD )是韩京清于1994年提出的[2],用于解决实际工程问题中由不连续或带随机噪声的量测信号合理提取连续信号及微分信号的问题[3].跟踪微分器利用了数值积分优于数值微分的事实,将给定信号的微分问题转化为对一组微分方程的积分问题,可以很好地实现对信号的跟踪和微分.跟踪微分器自诞生后已产生了多种改进形式,并获得了广泛应用[4].论文将跟踪微分器应用到导引头半捷联稳定系统中,用于由框架角位置信号提取框架角速度信号.搭建了半捷联导引头半实物仿真平台,通过半实物仿真研究不同频率弹体扰动下导引头半捷联稳定系统的隔离度,对半捷联导引头是否具备工程可行性给出了结论.1 跟踪微分器跟踪微分器的原理如图1,描述为:输入信号为v (t ),输出两个信号x 1(t )和x 2(t ).其中,x 1(t )能最快地跟踪输入信号v (t ),x 2(t )是x 1(t )的微分,可以作为输入信号v (t )的微分.实际中使用的是跟踪微分器的离散形式[5],其表达式为52图1 跟踪微分器原理示意x 1(k +1)=x 1(k )+h ・x 2(k )x 2(k +1)=x 2(k )+h ・f han (x 1(k )-v (k ) x 2(k ),r ,h 0)′,式中f han 为最速综合函数,调用方式为f han (u 1,u 2,u ,h 0),具体表达式为d =rh 2,a 0=h 0u 2,y =u 1+a 0a 1=d (d +8|y |)a 2=a 0+sign (y )(a 1-d )/2s y =(sign (y +d )-sign (y -d ))/2a =(a 0+y -a 2)s y +a 2s a =(sign (a +d )-sign (a -d ))/2fhan =-rad-sign (a )s a -r sign (a ).在跟踪微分器中,需要设计的参数有3个,积分步长h ,滤波因子h 0和快速因子r ,分别决定了微 分精度、滤波效果和跟踪速度.仿真中需要调试3个参数的值,使得微分效果最佳.2 导引头半捷联稳定系统数字仿真在进行半实物仿真试验验证前,首先要进行数字仿真,在数字仿真成功后才可以进行半实物仿真.数字仿真可以为半实物仿真提供参数初始设计值,提高半实物仿真效率.依照导引头半捷联稳定原理,考虑各种干扰力矩和测量噪声,建立半捷联稳定回路模型如图2.图中弹载陀螺为弹载角速率陀螺模型,TD 为跟踪微分器,角传感器为框架角位置传感器,噪声为传感器测量噪声,这里取为实际电位计的测量噪声±0105°,电机为力矩电机模型,01243为电机反电动势系数,0105为简化成继电环节的摩擦力矩系数,增益为功率放大器,控制器为PI 控制器.令跟踪指令为零,分别输入2°1Hz 、4°015Hz 和5°012Hz 的弹体扰动,观察平台惯性角度输出如图3~图5,计算不同频率弹体扰动下半捷联稳定系统的隔离度.图2 半捷联稳定回路模型 根据隔离度计算公式[6],隔离度=平台相对惯性空间转动的角度弹体相对惯性空间转动的角度×100%,计算得到3种不同频率弹体扰动下半捷联稳定系统的隔离度分别为5%、3%和2%.可以看出,半捷联稳定系统对弹体扰动的去耦能力是随弹体扰动频率的升高而降低的.以4°015Hz 为典型弹体扰动,5%为典型弹体扰动下稳定系统的隔离度指标,可以知道半捷联稳定系统的数字仿真结果是满足指标要求的.3 导引头半捷联稳定系统半实物仿真在数字仿真结果证明基于跟踪微分器的半捷联稳定系统满足隔离度指标要求后,还需要进行半实物仿真验证.半实物仿真是所有仿真中置信度最高的,其结果可以作为仿真的最终结论.在半实物仿真中,使用三轴运动转台模拟弹体运动,半捷联导引头由某型速率陀螺稳定平台式电视导引头改装得到,弹载计算机由单片机搭建,对各设备进行连接调试,组成半实物仿真系统.62北京工商大学学报(自然科学版) 2009年3月图3 2°1H z 弹体扰动下平台惯性角度数字仿真输出曲线图4 4°015Hz 弹体扰动下平台惯性角度数字仿真输出曲线图5 5°012Hz 弹体扰动下平台惯性角度数字仿真输出曲线令目标静止,转台模拟2°1Hz 、4°015Hz 和5°012Hz 的弹体扰动,使用角速率陀螺测量得到平台的惯性角度输出,分别如图6~图8.计算得到3种不同频率弹体扰动下半捷联稳定系统的隔离度分别为10%、415%和3%.同样,半捷联稳定系统的稳定性随弹体扰动频率升高而降低,典型弹体扰动下半实物仿真结果表明半捷联稳定系统隔离度同样满足指标要求.图6 2°1Hz 弹体扰动下平台惯性角度实物仿真输出曲线图7 4°015Hz 弹体扰动下平台惯性角度实物仿真输出曲线图8 5°012Hz 弹体扰动下平台惯性角度实物仿真输出曲线比较半实物仿真与数字仿真结果还可以看出,同样弹体扰动下半实物仿真输出较数字仿真输出大,其原因可能是数字仿真中对干扰力矩和测量噪72第27卷第2期 赵 刚等:基于跟踪微分器的导引头半捷联稳定系统半实物仿真研究声做了简化和忽略;半实物仿真中平台惯性角度输出信号较数字仿真平滑,原因可能是数字仿真中平台模型不准确,转动惯量较实际平台小造成的.4 结 论将跟踪微分器应用到导引头半捷联稳定系统中,对基于跟踪微分器的导引头半捷联稳定系统进行了数字仿真和半实物仿真.通过仿真与分析,得出以下结论:1)导引头半捷联稳定系统稳定性能与弹体扰动频率有关,扰动频率增大,隔离度增大,稳定性降低.2)典型弹体扰动下数字仿真和半实物仿真结果都表明基于跟踪微分器的导引头半捷联稳定系统的稳定性能满足指标要求,说明半捷联导引头具备工程可行性.3)由单片机搭建的弹载计算机计算能力不足成为跟踪微分器运算精度的瓶颈,以后的试验中可以使用更快速的计算机,稳定系统的稳定性能会有进一步提高.参考文献:[1] 周瑞青,吕善伟,刘新华.捷联式天线平台的角跟踪系统设计[J].系统工程与电子技术,2003,25(10): 1200-1202.[2] 韩京清,王伟.非线性跟踪-微分器[J].系统科学与数学,1994,14(2):177-183.[3] 武利强,林浩,韩京清.跟踪微分器滤波性能研究[J].系统仿真学报,2004,16(4):651-670.[4] 史永丽,侯朝桢.改进的非线性跟踪微分器设计[J].控制与决策,2008,23(6):647-650.[5] 韩京清.自抗扰控制技术[M].北京:国防工业出版社,2008.[6] 赵超.导引头稳定系统隔离度研究[J].电光与控制,2008,15(7):78-82.STU DY OF SEEKER SEMI2STRAPDOWN STAB LE SYSTEM HAR DWARE2IN2THE2LOOP SIMU LATION BASED ONTRACKING DIFFERENTIAT ORZHAO G ang, GUO Hua, YAN G Shu2xing(School of A erospace Science and Engi neeri ng,Beiji ng Instit ute of Technology,Beiji ng100081,Chi na)Abstract:Tracking differentiator is applied to seeker semi2strapdown stable system to calculate the platform inertial rate.Principle of TD is introduced,numerical simulation and hardware2in2the2loop simulation are carried out to seeker semi2strapdown stable system based on TD.The simulation results show that the stable performance of seeker semi2strapdown stable system rises with the reducing of missile disturbance frequency and the stable performance satisfies the requirement under classical mis2 sile disturbance.K ey w ords:tracking differentiator;semi2strapdown stabilization;seeker;hardware2in2the2loop simu2 lation(责任编辑:檀彩莲)82北京工商大学学报(自然科学版) 2009年3月。
【免费】-》导引头伺服系统隔离度与测试

收稿日期 :2008212223 ;修订日期 :2009203213. 基金项目 :国防预研基金资助项目 (No . 10401020202a)
1994
光学 精密工程
第 17 卷
1 引 言
导弹在飞行过程中 ,由于发动机和空气阻力 等因素的影响 ,弹体始终处于剧烈振动摇摆中。 这种扰动不但会影响导引头的目标位置测量精 度 ,而且会影响目标的识别甚至导致导引头无法 捕获与跟踪目标[122] 。导引头通常采用两轴两框 架机构 ,利用陀螺的惯性速率测量功能构成稳定 平台来隔离载体扰动并跟踪目标 。隔离度是指导 引头伺服系统对弹体扰动的去耦能力 ,是评价导 引头伺服系统扰动隔离性能的一个重要指标 。如 何简单高效地测试隔离度对提高导引头伺服系统 的开发效率具有重要意义 。目前常用的测试法是 使用飞行仿真转台模拟弹体扰动 ,使用 PSD 或 CCD 测量隔离后的扰动[324 ] ,这种方法可以获得 较高的测量精度 ,但是测试系统组成复杂 ,数据处 理难度较高 ,测试过程耗时较长 ,比较适用于系统 最后的性能检验 ,而不太适用于系统的开发过程 。 本文将从分析导引头伺服系统的扰动隔离原理入 手 ,提出一种适用于伺服系统调试阶段的 、基于 dSPACE 半实物仿真系统的隔离度测试方法 。
统为间接稳定式[6] 。此时陀螺输出为弹体在惯性
空间的角速度 。由式 (1) 可得 :
λ = + o y
gyro_ y
y
iz = ( gyro_ x si n λy +
gyro_ z co s λy ) +λz .
(3)
显然 ,将弹体扰动角速度通过姿态变换可获
得框架在惯性空间的角速度 , 以此构成稳定回路
Disturbance isolation index of seeker servo system and its test
基于干扰观测器的导引头稳定平台滑模控制
网 址 :www.sysele.com
基于干扰观测器的导引头稳定平台滑模控制
ห้องสมุดไป่ตู้
雷 虎 民 ,王 业 兴 ,卜 祥 伟 ,王 华 吉
(空军工程大学防空反导学院,陕西 西安 710051)
摘 要 :针 对 导 引 头 稳 定 平 台 存 在 不 确 定 弹 体 速 度 干 扰 以 及 非 线 性 摩 擦 干 扰 的 问 题 ,结 合 滑 模 控 制 和 非 线 性 干扰观测器理论,提出一种基于非线性干扰观测器的二阶滑模控制方法。针对 系 统 模 型 中 的 多 个 不 确 定 干 扰 项, 首先,采用新型微分跟踪器对状态量的导数值进行估计,进而得到干扰项的估 计 值,通 过 坐 标 变 换,将 系 统 中 的 不 确定项进行归一化处理,便于控制器设计;其次,基于新型微分跟踪器设计了新 型 非 线 性 干 扰 观 测 器,以 实 现 对 归 一化后系统干扰项的精确估计;最后,采用二阶 滑 模 控 制 算 法 进 行 控 制 器 设 计。 仿 真 实 验 证 明,新 型 非 线 性 干 扰 观测器精度高、响应快,基于干扰观测器的二阶滑模控制方法能够有效隔离弹体 扰 动 与 非 线 性 摩 擦 对 导 引 头 稳 定 平 台 的 干 扰 ,提 高 了 稳 定 平 台 的 鲁 棒 性 和 跟 踪 精 度 。
LEIHumin,WANG Yexing,BU Xiangwei,WANG Huaji
(犃犻狉犪狀犱 犕犻狊狊犻犾犲犇犲犳犲狀狊犲犆狅犾犾犲犵犲,犃犻狉犉狅狉犮犲犈狀犵犻狀犲犲狉犻狀犵犝狀犻狏犲狉狊犻狋狔,犡犻’犪狀710051,犆犺犻狀犪)
犃犫狊狋狉犪犮狋:Tosolvetheuncertainprojectilevelocitydisturbanceandnonlinearfrictionproblemsofthestabi lizer,combiningwithsliding modecontrolandobservertheory,asecondordersliding modecontrolbasedon nonlineardisturbanceobserverisproposed.A differentialtrackerisadoptedtoestimatethederivationofthe statevalue,andfurthermore,thefirstdisturbanceisacquired.Throughthecoordinatetransformation,disturb anceinthesystemisnormalized,whichsimplifiesthecontrollerdesign.Secondly,anobserverisdesignedbased onthedifferentialtracker,andthecontrolleraimstoachievepreciseestimationofnormalizeddisturbance. Finally,asecondorderslidingmodecontrolisadopted.Thesimulationresultsshowthatthenewnonlineardis turbanceobserverestimatesaccuratelyandresponsesquickly,andtheproposedsecondorderslidingmodecon trolbasedondisturbanceobserverisabletoisolatethedisturbanceofthemissilemotionandnonlinearfrictionofthe
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由图 6得 到传递 函数 :
按式 ( ) 7 转换 图 4形成 图 5 得 到传 递 函数 ,
, 番一 一
( 0) 1
E
一再
丽
( 2) 1
但 基 于几何 关 系 的隔离度 模 型无 明确 的物理 含 义 , 法解 释 不 加 电 或 电机 引 线 短 路状 态 下 角 无 速 度 作 用于 电机基 座 时 电机 转子 的运 动方式 。
或
电机基
x lo 一 o %
× lo o%
() 1
图 2
直 流 力 矩 电 机 驱 动 一 维 平 台
再 设 施 加 于 直 流 力 矩 电 机 上 的 电 压 为 【 电 ,,
式中: 0为平 台相对 惯 性 空 间转 动 的 角度 ; 为 弹 体相 对惯性 空 间转 动 的角 度 ; ( ∞ )£ 或 。 【 或 。、 ( 》 》 )
0一 + () 3
从 上 面 的 五 个 公 式 可 以 看 出 , 座 的 扰 动 角 基
速 度是通 过摩擦 和反 电势传 递到平 台上 的 。由摩
擦 产生 的角速度 传递机 制称 为摩擦 约束耦 合 。由 于反 电势 是通 过改变作 用于平 台上 的控制 力矩作
用 于平 台上 的 , 以反 电势产 生 的角 速度 传 递机 所
吴 晔 , : 引头稳 定平 台线 性 隔 离度 及提 高方 法 等 导
3
度 信号 叫 的角 速率 陀螺 形成 稳定 回路 , 立 隔离 。 建 2 2 基 于约 束耦 合 的隔离 度模 型 .
根据 图 3框 图 , 用 能 够敏 感 惯 性 空 间角 速 利
陀螺
度 的数 学模 型 。此 时 , 据 基 座 扰 动 角 速度 传 递 根
常被 称为 稳定 平 台 。安 装在 导 引头探 测器 平 台
坟葛 日期 I0 0 8 1 2 1 —0 — 6
统 采用 直接 驱动 方 式 , 电机 轴 与 负 载 轴 为 刚性 连 接, 不考 虑非 线性 因素 的影 响 。
作者 筒 介 t 吴
晔 ( 9 1 ) 男 , 究 员 , 要 从 事 雷 达 导 17一 , 研 主
稳 定 回路作 用 下 ,一 + 一 ( +△ ) +A ) +( 0
一
+A =0 0 。使导 引 头天线 电轴在 惯 性空 间保 持
不动 , 达到 了隔离 弹体扰 动 的 目的 , 实际上 很难 但 做 到完 全 消除 。
图 5 基 于约 束 耦 合 的 隔 离 度模 型 简 化 框 图
导 引头 稳 定 平 台线 性 隔离 度及 其 提 高 方 法
吴 晔 , 胡伟 锋 , 许 关健
( 海无 线 电设备研 究 所 ,上海 2 0 9 ) 上 0 0 0
摘 要 :由 扰 动 角速 度 传 递 机 制 和 空 间 角 度 几 何 叠 加 角 度 , 别 建 立 了 基 于 约 束 耦 合 和 分
也 有 A =A  ̄ A , 0 q 0即 +
。
制称 为直 接带 动 约束 耦 合 _ 。一 维 平 台框 图 , 4 ] 如
() 4
一 C 一 叫。 O O
图 3所 示 。
式 中 : 为 的 角 速 度 。
2 隔离 度 模 型
2 1 基座扰 动角速 度传 递机 制 .
b )敏感轴 相对基 座 的运 动 。 空间角位 置关 系 , 图 1 如 所示 [ 。 3 ]
iC 一 e fm 。 C ) + ( 一O 。
() 6
下
( . 厂
。
一
而
)L s ( + )+
U ) a +
CC m
一
+
fm
R
s ,
() 7
GM( ) ( )+ GD s n。 s 5 U。 5 () ()
w Ye H 己 We— e g, XU M e- i n , , if n i a j
( Sha ha di ng iRa o Equ pme t Re e r h I tt t i n s a c ns iu e,Sha gh i2 0 0,Chi ) n a 0 09 na
5所 示 。
2 3 基 于几 何关 系的 隔 离度模 型 . 根据 图 1应 用 空 间 角度 几 何 叠 加 原理 , 以 可 建立 另一 种 隔离度 的数 学模 型 , 图 6所示 。 如 在 弹体运 动 的作 用 下 , 陀螺 敏 感 到 了基座 扰动 角速 度 ∞ , 过稳 定 回路 负 反馈 驱动 电机产 。通 生框 架运 动 速 度 叫 , c }与 u 相 抵 消 , i 一 △ 十 即 x 0 A V=0 从 而消 除基 座扰 动的 影 响 。由 图 1 到 , , 看
。,
设 基座扰 动角速 度为 , 台台面 角速 度 为 平 这 两个量都 是相对 惯性 空间 的值 , 电机轴 相 则
反电势系数 图 3 一 维 平 台框 图
对 电机基 座 的角 速 度 为 ∞ 一c 。直 流力 矩 电机 。 u
驱 动一维 平 台, 图 2 示 。 如 所
第1 期
机 制形 成稳 定 回路框 图 , 图 4所示 。 如
反电势 系数
图 4 基于约束耦合的隔离度模型框 图
基座 转动 的 角速 度 信 号 ∞ 作 为 一 种 扰 动 通
过摩擦 及 反 电动势 引入 到 了导引头 稳定 平 台 电机 动力 学 回路 中。 基 于 约束耦 合 的 隔 离 度模 型 简化 框 图 , 图 如
上 的速率 陀螺 作 为 速度 环 的反 馈 器 件 , 够 敏感 能
0 引 言
为保 证导 引 头 的测 量 和跟 踪 精 度 , 引 头 位 导 标器 常采 用 陀螺稳 定来 消 除弹体 运 动对导 引头 的 影 响 , 中采 用速 率 陀 螺 稳 定 方案 的位 标 器 系 统 其
i r v n it r a c ee to a eo h y t m. mp o ig ds u b n erj cin r t ft es se
Ke r s e ke y wo d :s e r;s a l y pl to m ;f e or r o r l bs r a i n t bii a f r t e df wa d c nt o ;o e v to
空 间角速 度 , 成 的高 增 益 角 速度 稳 定 回路 可 以 构 保 证平 台在 惯性 空 间稳定 , 时 隔离载 体扰 动 。 实 隔 离度 是导 引头稳 定 平 台的一 个重 要性 能指 标 , 着 弹 速 的提 升 、 径 的减 小 、 引 头 精度 的 随 弹 导 提 高 , 隔 离度 要 求 也 越 来 越 高 。本 文研 究 了几 对 种 提高 系统 隔离 度 的方 法 , 中建 立 一个 准 确 详 其 尽 的隔 离度 模 型 是 关 键 。为 讨 论 简单 , 究 的系 研
基 于 几 何 关 系 的 线 性 隔 离度 模 型 , 讨 论 了 两 种 模 型 的 适 用 性 , 究 了几 种 提 高 系 统 隔 离度 的 并 研
方法 。
关 键 词 :导 引 头 ; 定 平 台 ; 馈 控 制 ; 测 稳 前 观
中 图 分 类 号 : J 6 . 3 T 75 3 1
分别 为 、 对应 的角 速 度 。隔 离度 数 值 越 小 , 平
台对 弹体运 动的 隔离能力 越强 。 导引头探 测器 敏 感 轴 ( 即天线 电轴或 光 学 探
测器 光轴 ) 惯性 空间 的运 动主要 由两部 分组 成 : 在 a )导引头 基座 的运动 , 也就是 弹体 的运动 ;
文献标 识码 : A
Li e r M o e nd I pr v d M e h d o s u b n e na d la m o e t o f Di t r a c
Reet n Raei ek r SSa it lto m j ci t S e e ’ tbl yP af r o n i
Ab ta t Two 1 e rmo es o it r a c ee to a e we e e tb ih d r s e tv l sr c : i a d l fds u b n erj cin r t r s a l e e p ciey n s
b s d o o t a n d c pln r m it ba ea ul rv l c t r n f rm e ha im ,a d a — a e n c ns r i e ou i g f o d s ur nc ng a e o iy t a s e c n s n l S a e om e rcr l ton f o pa e a l u r oston prn i l n t spa e . T h e O b s d on ge t i e a i r m s c ng es pe p ii i c p e i hi p r er 一 1 to ft w o m o e s w a i c s d. I a m ons r t d t t t e h s w e e us d t a i n o he t d l s d s us e t w s de t a e ha he m t od r e o
力矩 系数
根据 式 () 2 得 )一 I s , )l E(
( 1 1)
、
图 6 基 于 几 何 关 系 的 隔 离 度 模 型 框 图
4
制 导 与 引 信
第 3 卷 2
2 4 两 种 模 型 的 区 别 .
3 提 高 系统 隔 离度 的方 法
( 3 1)
第 3 卷 第 1 2 期 21 0 1年 3月
制 导 与 引 信