激光雷达发射和接收光学系统研究
LiDAR(雷达)技术介绍
激光雷达与微波雷达的异同:
激光雷达工作原理:
向被测目标发射探测信号(激光束),然后测量反射或发射信号的到达时间、强弱程度等参数,以确定目标的距离、方位、运动状态及表面光学特性。
用飞行时间法(Time of flight method)测算出L:
从公式可以看出精度取决于时间,所以对接收装置的要求很高。如果做到1cm的精度,可以推出对时间的测量精度达到0.067ns。
这些核心指标参数,其实就可以判断一个传感器是否满足你的使用需求
最大辐射功率
第一重要的参数,首先看是否得到安全认证,是否需要做防护
水平视场
机械式雷达360度旋转,水平全视角
垂直视场
一般16线俯仰角30度,从-15度到15度,应用最多、最广泛
光源波长
光学参数,纳米参数
最远测量距离
是否满足长距离探测
测量时间/帧频率
传统雷达以微波作为载波的雷达,大约出现在1935年
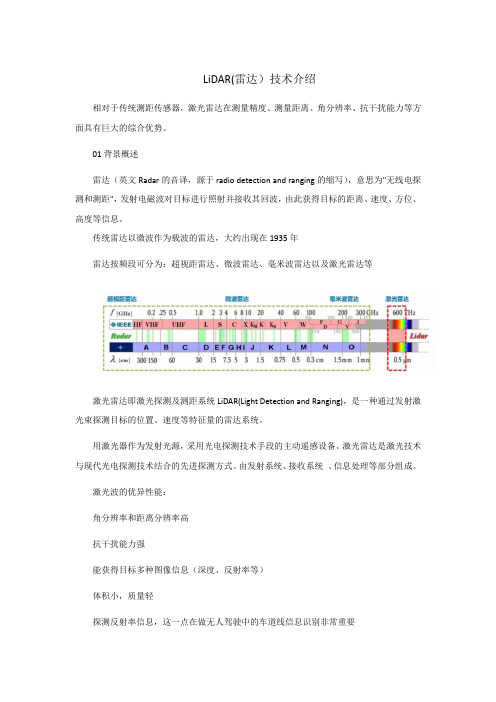
雷达按频段可分为:超视距雷达、微波雷达、毫米波雷达以及激光雷达等
激光雷达即激光探测及测距系统LiDAR(Light Detection and Ranging),是一种通过发射激光束探测目标的位置、速度等特征量的雷达系统。
用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。激光雷达是激光技术与现代光电探测技术结合的先进探测方式。由发射系统、接收系统、信息处理等部分组成。
LiDAR(雷达)技术介绍
相对于传统测距传感器,激光雷达在测量精度、测量距离、角分辨率、抗干扰能力等方面具有巨大的综合优势。
01背景概述
雷达(英文Radar的音译,源于radio detection and ranging的缩写),意思为"无线电探测和测距",发射电磁波对目标进行照射并接收其回波,由此获得目标的距离、速度、方位、高度等信息。
激光雷达的工作原理与信号处理
激光雷达的工作原理与信号处理激光雷达(Light Detection and Ranging,简称LiDAR)是一种利用激光束探测目标并测量其距离、速度和方向等信息的技术。
它在自动驾驶、环境监测、地图绘制等领域得到广泛应用。
本文将探讨激光雷达的工作原理以及信号处理方面的内容。
一、激光雷达的工作原理激光雷达通过发射一束窄束激光,然后测量激光束被目标物体反射后返回的时间和强度,从而实现测量目标物体的距离和形状等信息。
其工作原理可以分为激光发射、目标反射和激光接收三个过程。
1. 激光发射:激光雷达通过激光发射器发射一束激光束。
一般而言,激光雷达会采用红外激光作为发射光源,因为红外激光有较好的穿透能力和抗干扰性。
2. 目标反射:激光束照射到目标物体上后,会被目标反射回来。
目标物体的形状、颜色和表面材质等因素会影响激光的反射情况。
3. 激光接收:激光雷达接收到目标反射回来的激光束,并通过接收器将激光信号转换为电信号进行处理。
接收器通常包括光电二极管和放大器等组件,用于接收和放大反射信号。
二、激光雷达信号处理激光雷达通过对接收到的激光信号进行处理,可以获得目标物体的距离、速度和方向等信息。
信号处理在激光雷达系统中起着重要的作用,是激光雷达工作的关键环节。
1. 距离测量:利用激光束的发射和接收时间差,可以计算出目标物体与激光雷达之间的距离。
一般来说,激光雷达系统会使用飞行时间(Time of Flight)或相位差测量法(Phase Shift)来实现精确的距离测量。
2. 速度测量:通过分析接收到的激光信号的频率变化,可以获得目标物体的速度信息。
激光雷达通常采用多普勒效应来实现速度测量,即利用光频移变化进行速度测量。
3. 方向测量:利用激光雷达的扫描方式,即通过旋转或扫描来覆盖整个空间,可以获得目标物体的方向信息。
通常情况下,激光雷达会采用机械扫描或电子扫描的方式进行方向测量。
4. 数据处理:激光雷达系统会通过采样和数字信号处理技术对接收到的激光信号进行滤波、去噪和数据分析等处理。
第2讲激光及激光雷达系统-激光雷达系统2

5
激光雷达的分类
按照照使用用目的分类
6
激光雷达的分类
相互作用 反射 检测对象 比激光波长尺寸大 很多的物质 举例 地形测绘 气溶胶 空气分子 空气分子,水蒸气, SO2等污染物质 NO2等污染物质
8
激光成像雷达发展
四个阶段: 四个阶段 :
激光测距仪 跟踪测角测距雷达 激光成像雷达
9
激光成像雷达
只要发射激光波形具有足够高的波束质量和重复频率, 发射激 波 有 够高的波束质 复频率 接收信号达到一定的信噪比要求,均能通过波束扫描在探 测器的光敏面上得到目标的图像 测器的光敏面上得到目标的图像。
分为外差探测 分为 外差探测, ,零拍探测 零拍探测和 和多频外差探测 多频外差探测等 等
19
激光雷达外差探测原理
一般外差探测激光雷达系统由一台连续工作的激光 一般外差探测 激光雷达系统由一台连续工作的激光 器作为独立辐射源发出参考波 称为本地振荡器 器作为独立辐射源发出参考波,称为本地振荡器 器作为独立辐射源发出参考波,称为 称为本地振荡器 系统接收到的回波 信号与来自本地振 荡器的参考信号混 合之后,由混频器 输出的光束聚焦到 探测器上然后再进 行信号处理。
29
激光遥感观测系统
飞机 激光扫描仪 航摄相机 CCNS4导航控制系统 AEROControl IId 高 精度位置姿态测量系统 (IMU/DGPS) IMU与相机连接架 机载DGPS天线 地面DGPS基站接收机
激光遥感集成系统
激光雷达综述
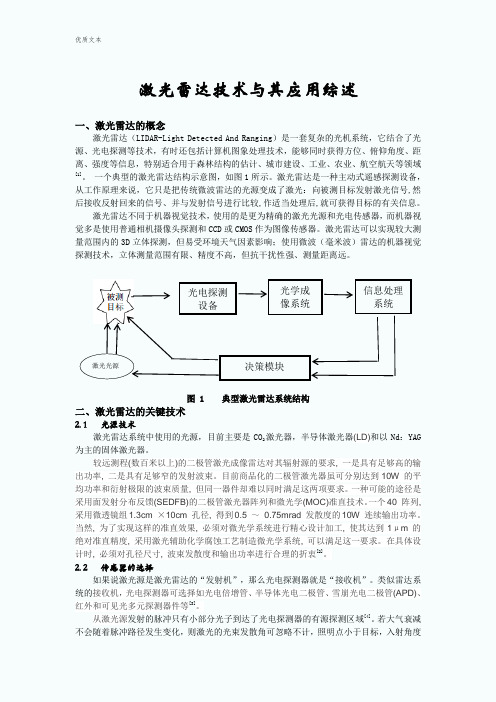
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。
北洋激光雷达 说明书

北洋激光雷达说明书北洋激光雷达是一种高精度、高分辨率的三维激光扫描系统,主要用于室内和室外的环境感知、建图和定位。
本说明书将为用户提供有关北洋激光雷达的详细说明和使用指南。
一、系统构成北洋激光雷达主要由激光发射器、接收器、光学系统、扫描控制系统、数据处理系统等部分组成。
激光发射器:北洋激光雷达采用固态激光发射器,发射波长为905nm,具有高功率、高效率、长寿命等特点。
接收器:北洋激光雷达采用高灵敏度、高分辨率的接收器,能够准确接收反射回来的激光信号。
光学系统:北洋激光雷达采用高质量的光学系统,具有高透过率、低散射率、高反射率等优点,能够保证高精度的扫描结果。
扫描控制系统:北洋激光雷达采用高速电机和精密控制系统,能够实现高速、高精度的扫描。
数据处理系统:北洋激光雷达采用高性能的处理器和专业的算法软件,能够实现快速、准确的数据处理和分析。
二、使用方法1. 连接设备:将北洋激光雷达与电脑或其他设备连接。
2. 启动设备:按下电源开关,启动设备。
3. 调整参数:根据需要,调整扫描参数,如扫描速度、扫描角度、扫描分辨率等。
4. 开始扫描:按下扫描按钮,开始进行扫描。
5. 获取数据:扫描完成后,可以通过数据接口获取扫描数据。
6. 数据处理:使用专业的数据处理软件,对扫描数据进行处理和分析。
三、使用注意事项1. 使用前,请先仔细阅读本说明书,了解设备的使用方法和注意事项。
2. 在使用设备时,应注意安全,避免直接照射人眼。
3. 在使用设备时,应注意保护设备,避免碰撞和摔落。
4. 在使用设备时,应注意环境光的影响,避免在强光环境下使用。
5. 在使用设备时,应注意保持设备干燥、清洁。
6. 在使用设备时,应避免在易爆、易燃的环境中使用。
四、使用范围北洋激光雷达主要应用于室内和室外的环境感知、建图和定位,适用于机器人导航、智能制造、智慧城市、安防监控等领域。
五、总结本说明书为用户提供了北洋激光雷达的详细说明和使用指南,希望能够帮助用户更好地理解和使用北洋激光雷达。
简述激光雷达的结构、原理、分类及特点。

简述激光雷达的结构、原理、分类及特点。
激光雷达是一种高精度、高分辨率、高可靠性的测量设备,广泛应用于自动驾驶、地形测量、工业检测等领域。
本文将从激光雷达的结构、原理、分类及特点等方面进行简述。
一、激光雷达的结构激光雷达通常由激光器、光学系统、控制系统、接收器、信号处理器等组成。
1. 激光器:激光器是激光雷达的核心部件,通常采用半导体激光器或固体激光器,能够发射高功率、高频率的激光束。
2. 光学系统:光学系统包括发射光学系统和接收光学系统。
发射光学系统负责将激光束聚焦成一束细小的光束,以便将激光束精确地照射到目标物体上。
接收光学系统负责收集目标物体反射回来的激光信号,并将其转化为电信号。
3. 控制系统:控制系统是激光雷达的智能核心,负责控制激光器的发射和接收,以及激光束的聚焦和扫描。
4. 接收器:接收器是激光雷达的另一个核心部件,负责接收目标物体反射回来的激光信号,并将其转化为电信号。
接收器的性能直接影响激光雷达的精度和分辨率。
5. 信号处理器:信号处理器负责对接收到的激光信号进行处理和分析,提取目标物体的位置、距离、速度等信息,并将其传递给控制系统进行下一步处理。
二、激光雷达的原理激光雷达的原理是利用激光束与目标物体之间的相互作用,通过测量激光束的反射或散射来确定目标物体的位置、距离、速度等信息。
当激光束照射到目标物体上时,部分激光束会被目标物体吸收,部分激光束会被目标物体反射或散射。
接收器收集到反射或散射的激光信号后,通过计算激光束的传播时间和速度,可以确定目标物体的距离和速度。
同时,通过对激光束的反射或散射特征进行分析,可以确定目标物体的位置、形状等信息。
三、激光雷达的分类激光雷达可以按照使用的激光类型、扫描方式、工作原理等多种方式进行分类。
以下是常见的分类方式:1. 激光类型:根据激光类型的不同,激光雷达可以分为固体激光雷达和半导体激光雷达。
固体激光雷达通常使用固体材料作为激光介质,具有高功率、高频率等优点;半导体激光雷达通常使用半导体材料作为激光介质,具有体积小、功耗低等优点。
激光雷达-sick 激光雷达
激光雷达原理示意图
激光雷达应用
激光雷达的作用是能精确测量目标 位置(距离和角度)、运动状态 (速度、振动和姿态)和形状,探 测、识别、分辨和跟踪目标。经过 多年努力,科学家们已研制出火控 激光雷达、侦测激光雷达、导弹制 导激光雷达、靶场测量激光雷达、 导航激光雷达等。
相干激光雷达技术
雷达探测主要分为直接探测和相干探测两类,其中直 接探测比较简单,即将接收到的光能量聚焦到光敏元件上, 并产生与入射光功率成正比的电压或电流。由此可以看出, 该过程与传统的被动光学接收或典型的测距机原理大致相 同。因而,这里主要讨论相干探测。 所谓相干探测,就是到达探测器的不仅是信号波,而是 信号波与某一参考波的相干混合的结果。根据参考波的辐 射源及特性的不同,又可分为外差探测、零拍探测。
激光雷达按其结构可分为单稳与双稳两类,双稳系 统中发射部分与接收部分异地放置,目的是提高空 间分辨率。当前脉宽为ns级的激光可提供相当高的 空间分辨率,故双稳系统已很少采用,单稳态系统 往往是单端系统,发射与接收信号共用一个光学孔 径,并由发送、接收(T / R)开关隔离,如图:
激光器
光束整形系统
图1
透射式接收望远镜
图2 反射式接收望远镜
处理系统
激光雷达的信号检测处理系统包括放大器显示 器和微机等。放大器的作用是除去经过光电探测器 的目标散射电信号与本地振荡电信号复合后的电信 号中的直流分量,获取载有目标全部信息的外差信号。 显示器通常用于按强度-时间的形式来实时显示激光 雷达回波信号。显示器通常由一台高频示波器(带宽 100MHz 以上)担任,直接显示来自放大器的激光雷达 回波。从显示器上可以清楚地看出激光雷达回波的 特征和变化,因此显示器对监视激光雷达的工作状态 和指导激光雷达的整机调整都非常有用。微机通常 用于探测结果的实时显示、回波数据的自动采集、 激光雷达的自动调控以及回波数据的反演处理和各 种数据显示方式的处理。
激光雷达原理
激光雷达原理------读书笔记99121-佃邓洪川一•概念:雷达"(Radio Detection and Range,Radar)是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图微波雷达显示控制激光雷达激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频移大,可以探测从低速到高速的目标。
天线和系统的尺寸可以作得很小。
利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。
目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种:(1)按激光波段分,有紫外激光雷达、可见激光雷达和红外激光雷达。
(2)按激光介质分,有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。
(3)按激光发射波形分,有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
(4)按显示方式分,有模拟或数字显示激光雷达和成像激光雷达。
(5)按运载平台分,有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。
(6)按功能分,有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像雷达,激光目标指示器和生物激光雷达等。
(7)按用途分,有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。
激光雷达简介PPT优秀课件
目标 物体
伺服 系统
前置放 主放 大器 大器
信号 模数 处理 转换
主处 理器
距离 速度 角度 目标图 信息 信息 信息 像信息
通信 系统
屏幕 显示
理论 发射 基础 系统
接收 系统
信息 处理
运载 体积 平台 重量
工作 模式
第 一 代
经典理 论
气体激光, 传统光学
系统
单元探测器, 脉冲体制, 直接接收
D电非P子S扫S扫发描描射,,面外阵差探接测收器,
集成模块, DSP芯片, 成像显示
车/机载, 弹/星载
功能部 件, MOEM S,小
多波长复合, 多功能模块, 智能化模块
第 四 代
光子探 测,纳 米物理
阵列发射, 微光学系
统
微光学系统, 焦平面阵列 探测器,光
纤导光
硬软件融 合,系统 级芯片, 高分辨率, 成像显示
以激光为载波,以 光电探测器为接收 器件,以光学望远 镜为天线,俗称“ 激光雷达”。
本质相同
1.工作原理:
传感器发射激光束打到目标物体上并反射回来,接收器准确地测量出 光脉冲从发射到被反射回的传播时间,光速已知,就可得到从激光雷达到目 标点的距离。
若激光束不断地扫描目标物,就可以得到目标物上全部目标点的数据, 用此数据进行成像处理后,就可得到精确的三维立体图像。
(c)Weak feedback C≈1, vertical scale 10 mV div−1.
(d) Moderate feedback C>1, vertical scale 20 mV div−1.
Velocity:Doppler Frequency
激光雷达信号采集与处理的研究
鬈酝黪嚣 豢键疆
激毙雷遂馈号秉纂 9 理 嘶
摘要 : 简单介绍 了半导体脉 ;扫描激光雷达距离成像和强度成像的基本原理 , 中 并分析 了回波信号采集与处
理系统需要达到的条件 , 而设计 出了一套以 D O 9 2 进 S 2 0 虚拟示波器和计算机 为核心 的扫描激光雷达数据 采集与处理系统 。 通过编 写的 V B程序对其进行控制 , 使其满足对激光雷达回波信 号的采集要求 , 回波 对
与 实 时 处 理 问题 时 ,有 时会 产 生 高 频 信 号 干 扰 和 系 统 不 稳 定 等 问题 。本 文 以DS 9 2 拟 示 波 器 和 V 语 言 为 O2 0 虚 B 基 础 开 发 了 一 种 雷 达 回波 信 号 采 集 与 处 理 系 统 , 该 系 统 不 但 能很 好 的 避 免 以上 问题 的 出现 ,而 且 对 后 续 的信
激 光 器 在 提 高输 出 功 率 和 改进 光 束 方 向性 能 以及 探 测 器 降 低 探 测 阈值 等 方 面取 得 的 重 大 进 展 ,使 半 导 体 激 光 器 无 论 在 民 用 领 域 还 是 军 事 领 域 都 有 了广 泛 的应 用 前 景 。 目前 国 内激 光 雷 达 回 波 信 号 采 集 与 处 理 的 研 究 处 于 一个 热 门领 域 ,采 用 的方 法 与技 术 也 多 种 多 样 , 但 是
以完成一次对平面的扫描 。如 图 2所示 。
由激 光 器 发 射 的 平 行 纸 面 的 偏 振 高 重 复 频 率 脉冲 激光 透 过 一 维 扫 描 振 镜 ,经 过 发 射 光 学 系 统 照 射 到 物 体 上 。 水平 扫 描 发 射 的脉 冲 激 光 由 目标 散 射 后 ,经 过 接 受 光 学 系 统 返 回 到