基于OpenCV的车道线实时检测
使用Python和OpenCV在道路上找到车道线
使用Python和OpenCV在道路上找到车道线
使用Python和OpenCV在道路上找到车道线
识别道路上的车道是所有司机的共同任务,以确保车辆在驾驶时处于车道限制之内,并减少因越过车道而与其他车辆发生碰撞的机会。
对自动驾驶汽车来说,这同样也是一项关键任务。
事实证明,使用计算机视觉技术识别道路上的车道标记是可能的。
本算法将介绍其中的一些技术。
这个项目的目标是创建一种方法,使用Python和OpenCV在道路上找到车道线。
实例图像
Udacity提供了960 x 540像素的示例图像,用于训练我们的算法。
下面是提供的两个图像。
算法步骤
在这一部分中,我们将详细介绍本算法所需的不同步骤,这将使我们能够识别和分类车道线,如下所示:
将原始图像转换为HSL
从HSL图像中分离出黄色和白色
将分离的HSL与原始图像相结合
将图像转换为灰度,便于操作
应用高斯模糊来平滑边缘
在平滑的灰色图像上应用Canny边缘检测
跟踪感兴趣的区域,并剔除其他区域的信息
执行一个霍夫变换,在我们感兴趣的区域内找到车道,并用红色跟踪它们
分开左车道和右车道
插入直线梯度来创建两条平滑的直线
每个步骤的输入都是前一步的输出(例如,我们对区域分割图像应用Hough变换)。
转换到不同的色彩空间
虽然我们的图像目前是RBG格式,但是我们应该探索在不同的颜色空间,如HSL或HSV。
基于OpenCV的视频道路车辆检测与跟踪

基于OpenCV的视频道路车辆检测与跟踪近年来,智能驾驶技术飞速进步,视频道路车辆检测与跟踪技术成为了分外重要的探究方向之一。
OpenCV是一个广泛应用于计算机视觉领域的开源库,可以提供各种强大的图像处理和分析功能。
本文将介绍技术,并展示其在智能交通系统中的应用。
1. 引言在智能交通系统中,视频监控系统可以实时得到道路上的交通信息,并援助提高交通安全性和效率。
其中,车辆检测与跟踪是视频监控系统中一个重要的环节。
本文将使用OpenCV实现车辆检测与跟踪算法,并探讨其在实际应用中的效果和问题。
2. 车辆检测车辆检测是智能交通系统中关键的一环。
起首,需要将视频图像进行预处理,包括去噪、图像增强和尺寸归一化等。
接下来,可以使用机器进修算法或深度进修算法训练一个目标检测模型,来检测图像中的车辆位置。
其中,传统的机器进修算法如Haar特征分类器、HOG+SVM等已经被证明有效。
此外,深度进修算法如YOLO、Faster R-CNN等也能够在车辆检测任务中取得不俗效果。
3. 车辆跟踪车辆跟踪是在车辆检测的基础上,通过追踪连续的视频帧来实现对车辆的跟踪。
在OpenCV中,有多种跟踪算法可供选择,如均值漂移、卡尔曼滤波、基于流的光流跟踪等。
这些算法可以依据车辆的运动特点和场景要求,选择最适合的算法进行车辆跟踪。
4. 算法实现与优化基于OpenCV,可以通过编程实现车辆检测与跟踪算法。
在实现过程中,需要注意优化算法的效率和准确性。
起首,可以通过图像金字塔技术来提高算法的检测和跟踪速度。
其次,可以利用GPU加速和多线程技术来提高算法的处理速度。
此外,还可以借助OpenCL等并行计算框架来加速算法的执行。
5. 试验与结果分析为了验证基于OpenCV的车辆检测与跟踪技术的有效性,进行了一系列试验。
试验数据包括不同场景下的道路视频,通过与手动标注的真值进行比较,评估了算法的检测准确度和跟踪精度。
试验结果表明,基于OpenCV的车辆检测与跟踪技术在不同场景下都具备一定的检测和跟踪能力。
基于OpenCV实现车道线检测(自动驾驶
基于OpenCV实现车道线检测(⾃动驾驶机器视觉)⽬录0 前⾔1 车道线检测2 ⽬标3 检测思路4 代码实现4.1 视频图像加载4.2 车道线区域4.3 区域4.4 canny 边缘检测4.5 霍夫变换(Hough transform)4.6 HoughLinesP 检测原理0 前⾔⽆⼈驾驶技术是机器学习为主的⼀门前沿领域,在⽆⼈驾驶领域中机器学习的各种算法随处可见,今天学长给⼤家介绍⽆⼈驾驶技术中的车道线检测。
1 车道线检测在⽆⼈驾驶领域每⼀个任务都是相当复杂,看上去⽆从下⼿。
那么⾯对这样极其复杂问题,我们解决问题⽅式从先尝试简化问题,然后由简⼊难⼀步⼀步尝试来⼀个⼀个地解决问题。
车道线检测在⽆⼈驾驶中应该算是⽐较简单的任务,依赖计算机视觉⼀些相关技术,通过读取 camera 传⼊的图像数据进⾏分析,识别出车道线位置,我想这个对于 lidar 可能是⽆能为⼒。
所以今天我们就从最简单任务说起,看看有哪些技术可以帮助我们检出车道线。
我们先把问题简化,所谓简化问题就是⽤⼀些条件限制来缩⼩车道线检测的问题。
我们先看数据,也就是输⼊算法是车辆⾏驶的图像,输出车道线位置。
更多时候我们如何处理⼀件⽐较困难任务,可能有时候我们拿到任务时还没有任何思路,不要着急也不⽤想太多,我们先开始⼀步⼀步地做,从最简单的开始做起,随着做就会有思路,同样⼀些问题也会暴露出来。
我们先找⼀段视频,这段视频是我从⽹上⼀个关于车道线检测项⽬中拿到的,也参考他的思路来做这件事。
好现在就开始做这件事,那么最简单的事就是先读取视频,然后将其显⽰在屏幕以便于调试。
2 ⽬标检测图像中车道线位置,将车道线信息提供路径规划。
3 检测思路图像灰度处理图像⾼斯平滑处理canny 边缘检测区域 Mask霍夫变换绘制车道线4 代码实现4.1 视频图像加载import cv2import numpy as npimport sysimport pygamefrom pygame.locals import *class Display(object):def __init__(self,Width,Height):pygame.init()pygame.display.set_caption('Drive Video')self.screen = pygame.display.set_mode((Width,Height),0,32)def paint(self,draw):self.screen.fill([0,0,0])draw = cv2.transpose(draw)draw = pygame.surfarray.make_surface(draw)self.screen.blit(draw,(0,0))pygame.display.update()if __name__ == "__main__":solid_white_right_video_path = "test_videos/丹成学长车道线检测.mp4"cap = cv2.VideoCapture(solid_white_right_video_path)Width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))Height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))display = Display(Width,Height)while True:ret, draw = cap.read()draw = cv2.cvtColor(draw,cv2.COLOR_BGR2RGB)if ret == False:breakdisplay.paint(draw)for event in pygame.event.get():if event.type == QUIT:sys.exit()上⾯代码学长就不多说了,默认⼤家对 python 是有所了解,关于如何使⽤ opencv 读取图⽚⽹上代码⽰例也很多,⼤家⼀看就懂。
opencv车道线检测

opencv车道线检测opencv车道线检测完成的功能1. 图像裁剪:通过设定图像ROI区域,拷贝图像获得裁剪图像2. 反透视变换:⽤的是⽼师给的视频,没有对应的变换矩阵。
所以建⽴⼆维坐标,通过四点映射的⽅法计算矩阵,进⾏反透视变化。
后因ROI区域的设置易造成变换矩阵获取困难和插值像素得到的透视图效果不理想,故没应⽤。
3. ⼆值化:先变化为灰度图,然后设定阈值直接变成⼆值化图像。
4. 形态学滤波:对⼆值化图像进⾏腐蚀,去除噪点;然后对图像进⾏膨胀,弥补对车道线的腐蚀。
5. 边缘检测:canny变化、sobel变化和laplacian变化中选择了效果⽐较好的canny变化,三者在代码中均可⽤,canny变化效果稍微好⼀点。
6. 直线检测:实现了两种⽅法①使⽤opencv库封装好的霍夫直线检测函数,在原图对应区域⽤红线描出车道线②⾃⼰写了⼀种直线检测,在头⽂件中,遍历ROI区域进⾏特定⾓度范围的直线检测。
两种⽅法均可在视频中体现,第⼀种⽅法运⾏效率较快。
7. 按键控制:空格暂停,其余键退出,⽅便调试和截图。
实现的效果在亮度良好道路条件良好的情况下,检测车前区域的车道线实现⽐较成功,排除掉⾼速护栏的影响,⽽且原图像还能完整体现。
车⼦⾏驶在⾼速公路⼤型弯道上,可以在⼀定⾓度范围内认定车道线仍是直线,检测出为直线。
车⼦切换过程中只有⼀根车道线被识别,但是稳定回变换车道后,实现效果良好。
减速线为黄⾊,⼆值化是也被过滤,没造成影响。
亮度,图像亮度变低,⼆值化时同⼀阈值把车道线给过滤掉,造成⽆法识别车道线的现象。
在道路损坏的情况下,由于阈值⼀定,基本上检测不出车道线。
结论实现的功能:实现了车道线检测的基本功能,反透视变换矩阵实现了但效果不太理想,使⽤⾃⼰写的直线检测部分,车道线识别抗⼲扰能⼒较强。
缺点:整个识别系统都是固定的参数,只能在特定的环境产⽣良好的效果。
改进空间:提取全部关键参数,每次对ROI图像进⾏快速扫描更新参数,否则使⽤默认参数。
基于OpenCV的车道线检测
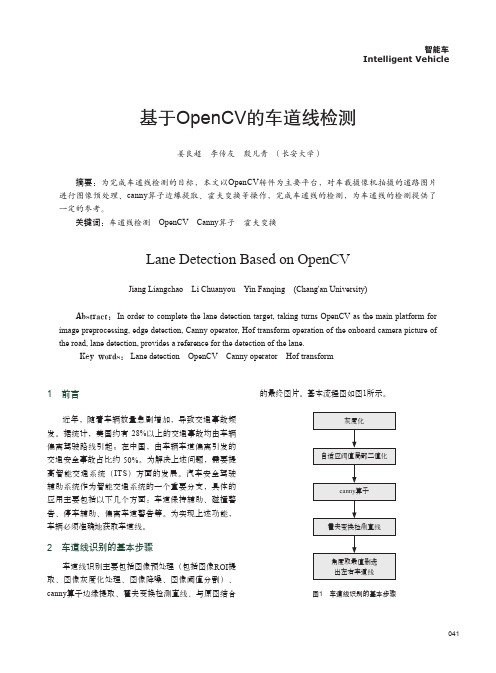
041基于OpenCV 的车道线检测Abstract: In order to complete the lane detection target, taking turns OpenCV as the main platform for image preprocessing, edge detection, Canny operator, Hof transform operation of the onboard camera picture of the road, lane detection, provides a reference for the detection of the lane.Key words: Lane detection OpenCV Canny operator Hof transformJiang Liangchao Li Chuanyou Yin Fanqing (Chang'an University)Lane Detection Based on OpenCV摘要:为完成车道线检测的目标,本文以OpenCV 转件为主要平台,对车载摄像机拍摄的道路图片进行图像预处理、canny 算子边缘提取、霍夫变换等操作,完成车道线的检测,为车道线的检测提供了一定的参考。
关键词:车道线检测 OpenCV Canny 算子 霍夫变换姜良超 李传友 殷凡青 (长安大学)1 前言近年,随着车辆数量急剧增加,导致交通事故频发。
据统计,美国约有 28%以上的交通事故均由车辆偏离驾驶路线引起;在中国,由车辆车道偏离引发的交通安全事故占比约 50%。
为解决上述问题,需要提高智能交通系统(ITS )方面的发展。
汽车安全驾驶辅助系统作为智能交通系统的一个重要分支,具体的应用主要包括以下几个方面:车道保持辅助、碰撞警告、停车辅助、偏离车道警告等。
为实现上述功能,车辆必须准确地获取车道线。
基于深度学习的车道线检测方法研究与应用

基于深度学习的车道线检测方法研究与应用I. 简述随着科技的发展,越来越多的人开始关注这一领域。
近年来研究人员们提出了许多新的算法和技术,使得车道线检测的准确性和鲁棒性得到了很大的提高。
同时这些方法也在不断地应用于实际的道路监控系统和自动驾驶汽车中,为人们的出行带来了极大的便利。
基于深度学习的车道线检测方法是一项非常有前景的技术,相信在未来的日子里,它会为我们的生活带来更多的惊喜和便利。
A. 研究背景和意义随着科技的飞速发展,人工智能技术在各个领域都取得了显著的成果。
其中基于深度学习的计算机视觉技术在车道线检测方面具有广泛的应用前景。
然而当前市场上的车道线检测方法仍存在许多问题,如检测精度不高、对复杂场景适应性差等。
因此研究一种高效、准确且具有良好泛化能力的车道线检测方法具有重要的理论和实际意义。
首先车道线检测对于自动驾驶汽车的安全驾驶至关重要,在复杂的道路环境中,车辆需要能够准确地识别车道线,以便更好地规划行驶路线和保持车速稳定。
此外车道线检测还有助于提高驾驶员的驾驶舒适度和安全性,降低交通事故的发生率。
其次车道线检测方法的研究与应用将推动计算机视觉技术的发展。
深度学习作为一种强大的机器学习方法,已经在图像识别、目标检测等领域取得了突破性进展。
将深度学习技术应用于车道线检测,有望提高检测方法的性能和效率,为其他计算机视觉任务提供有力支持。
车道线检测方法的研究与应用将促进智能交通系统的建设,随着城市化进程的加快,交通拥堵和交通安全问题日益严重。
通过研究更先进的车道线检测方法,可以为智能交通系统提供更加精确的道路信息,从而提高道路通行效率和交通安全水平。
基于深度学习的车道线检测方法研究与应用具有重要的研究背景和意义。
这不仅有助于解决当前市场上存在的问题,提高车道线检测的性能和实用性,还将推动计算机视觉技术的发展和智能交通系统的建设。
因此我们应该积极投入到这一领域的研究中,为实现自动驾驶汽车的普及和道路交通安全做出贡献。
占用应急车道检测Python
占用应急车道检测Python
车道线检测是自动驾驶汽车以及一般计算机视觉的关键组件。
这个概念用于描述自动驾驶汽车的路径并避免进入另一条车道的风险。
在本文中,我们将构建一个机器学习项目来实时检测车道线。
我们将使用 opencvo 库使用计算机视觉的概念来做到这一点。
为了检测车道,我们必须检测车道两侧的白色标记。
使用 Python 和 opencvo 进行道路车道线检测
使用Python 中的计算机视觉技术,我们将识别自动驾驶汽车必需行驶的道路车道线。
这将是自动驾驶汽车的关键部分,因为自动驾驶汽车不应该越过它的车道,也不应该进入对面车道以避免事故。
帧掩码和霍夫线变换
要检测车道中的白色标记,首先,我们需要屏蔽帧的其余部分。
我们使用帧屏蔽来做到这一点。
该帧只不过是图像像素值的bumpy 数组。
为了掩盖帧中不必要的像素,我们只需将bumpy 数组中的这些像素值更新为 0。
制作后我们需要检测车道线。
用于检测此类数学形状的技术称为霍夫变换。
霍夫变换可以检测矩形、圆形、三角形和直线等形状。
再来说下实现的主要步骤和环节吧
第一步:对视频的每一帧,做图像处理,包括蒙版、灰度化、二值化和去除噪声;
第二步:利用霍夫变换,在图片中提取出线段集合;
第三步:对提取出的线段集合做一定的处理。
基于OpenCV的车道线检测方法与设计方案
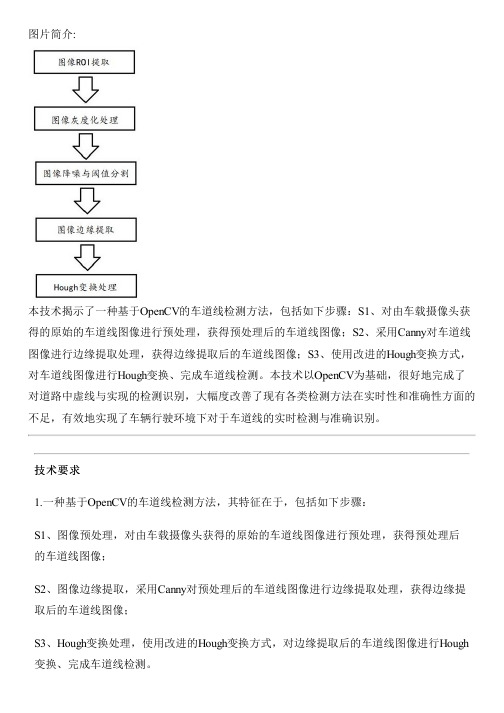
图片简介:本技术揭示了一种基于OpenCV的车道线检测方法,包括如下步骤:S1、对由车载摄像头获得的原始的车道线图像进行预处理,获得预处理后的车道线图像;S2、采用Canny对车道线图像进行边缘提取处理,获得边缘提取后的车道线图像;S3、使用改进的Hough变换方式,对车道线图像进行Hough变换、完成车道线检测。
本技术以OpenCV为基础,很好地完成了对道路中虚线与实现的检测识别,大幅度改善了现有各类检测方法在实时性和准确性方面的不足,有效地实现了车辆行驶环境下对于车道线的实时检测与准确识别。
技术要求1.一种基于OpenCV的车道线检测方法,其特征在于,包括如下步骤:S1、图像预处理,对由车载摄像头获得的原始的车道线图像进行预处理,获得预处理后的车道线图像;S2、图像边缘提取,采用Canny对预处理后的车道线图像进行边缘提取处理,获得边缘提取后的车道线图像;S3、Hough变换处理,使用改进的Hough变换方式,对边缘提取后的车道线图像进行Hough 变换、完成车道线检测。
2.根据权利要求1所述的基于OpenCV的车道线检测方法,其特征在于,S1所述图像预处理,包括如下步骤:S11、图像ROI提取,采用OpenCV中的cvSetImageROI函数对车载摄像头所拍摄的图片进行感兴趣区域的剪裁选取;S12、图像灰度化处理,对彩色三通道RGB的原始的车道线图像进行转化,建立亮度H与R、G、B三个颜色的对应,以H亮度值表达出图像中每个像素点的灰度值,并采用OpenCV中的cvCvtColor函数完成对整个原始的车道线图像的灰度处理,获得单通道HSV 的车道线图像;S13、图像降噪与阈值分割,采用OpenCV中的medianBlur_SortNet函数消除车道线图像中的噪声,采用OTSU算法对车道线图像进行阈值分割,获得预处理后的车道线图像。
3.根据权利要求1所述的基于OpenCV的车道线检测方法,其特征在于,S2所述图像边缘提取,包括如下步骤:S21、图像平滑处理,使用高斯滤波器平滑图像、对车道线图像进行加权平均,图像中任意一个像素点的值均由其自身及邻域内其他像素点的值经加权平均后获得,计算公式为,,其中,为概率,为高斯半径值,;S22、确定梯度幅值和方向,使用soble算子、结合车道线图像进行水平和垂直方向的边缘检测计算,得到对应图像的梯度幅值和梯度方向;S23、图像边缘量化,沿着梯度方向对梯度幅值进行非极大值抑制,完成对图像的边缘量化;S24、边缘细化,选取车道线图像上的任意一个像素点,将其领域中心与沿梯度方向上的相邻两个像素点进行比较,若该像素点的中心像素为最大值则保留,否则将该像素点的中心像素置0;S25、边缘连接,使用双阈值算法检测和连接边缘,选取两个系数作为阈值,其中一个为高阈值TH、另外一个为低阈值TL,取TH=0.2、TL=0.1,将小于阈值的像素点标记为0并抛弃;将大于阈值的点标记为1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车道线特征提取
(b)图像边缘提取:三种边缘检测算法 ①Sobel算子:先对图像进行加权平滑处理,然后进
行微分运算
②Canny算子:先用高斯滤波去噪,对图像进行平滑
处理;对平滑以后的图像分别沿x,y方向求取偏导数,来 得到其边缘梯度,然后分别在边缘梯度的水平、垂直、 45度和135度等四个方向上,用比较各自邻近的像素,来 得到局部极大值。 ③Kirsch算子:通过在八个不同的方向上,提取图像 的边缘点,来获得信息完整的图像边缘
四、问题及解决方案
问题4:明显的错误检测结果的剔除 解决措施:有时候车道线明显的检测错误(如两条标记车道线 交叉),尝试用把视频图片分为左半图,右半图分别处理解决
问题5:算法的优化,减少每帧图片处理的平均时间 解决措施:(1)图片压缩后再进行处理 (2)跳帧检测
谢谢!
一、项目背景
项目全称:多功能行车记录仪 项目意义:希望开发出集成一些软件功能的手机APP,
并通过WiFi可以与行车记录仪连接,开发出有卖点的产 品
部分功能:
车牌检测 道路车辆检测 车道线检测
一、项目背景
• 车辆辅助驾驶系统
一、项目背景
• OpenCV简介
Open Source Computer Vision Library(开源计算机视觉库) 跨平台、轻量级而且高效、免费 OpenCV用C++语言编写,它的主要接口也是C++语言, 但是依然保留了大量的初级版本的C语言接口
二、项目内容
• 车道检测与识别系统
车道线检测流程
道路预处理 车道线特征提取 车道线检测
道路预处理: (a)道路图像灰度化 (b)道路图像滤波 (c)道路图像增强
道路预处理
道路图像灰度化 道路图像增强
车道线特征提取
车道线特征提取: (a)二值化 (b)图像边缘提取 (c)透视变换
自适应阈值二值化处理
具体实施方案
灰度化 自适应阈值 局部二值化 Canny算子 霍夫变换 检测直线 角度取最值删选 出左右车道线
三、项目展示
四、问题及解决方案
问题1:一条道车线旁可能会标出几条线 解决措施:先用随机抽样一致性算法(Ransac)合并直线,但 比较麻烦;后来采用角度去最值的方法,效果不错。 问题2:检测不连续 解决措施:如果某一帧没检测出符合条件的线(特别是虚 线),用上一帧结果代替。 问题3:视频中摄像头俯仰角变化的影响 解决措施:通过建立摄像机与车体坐标系模型来标定摄像机 参数,然后在图像坐标系下,分割图像获得感兴趣区域 (ROI);在ROI中提取车道线信息。
基于OpenCV的车道线实时检测
报告人: 徐小艺 小组成员:管栋 徐小艺 2015年5月21日
报告内容
一、项目背景 二、项目原理 车道检测与识别系统 道路预处理 车道线特征提取 车道线检测——直线检测 具体实施方案 三、项目展示 四、问题及解决方案
一、项目背景
• 欧洲国家发生的道路交通事故中有 1/3 是由车辆变道 或车辆偏离其正常行驶车道区域所导致的 • 美国联邦公路局的报告:如果可以获得车辆与车道之 间的相对位置信息,则可以防止 53%左右的车道偏离 事故 • 针对路面标线检测的研究是实现车道偏离警告系统的 关键技术,其对于实现车辆的完全自主驾驶具有深远的 意义
另外,还有形态学方法(腐蚀、膨胀),采用的人较少。
车道线特征提取
(b)图像边缘提取
Canny算子提取边缘图像效果
车道线特征提取
(c)逆透视变换
逆透视变换就是在满足道路平坦假设的前提下,把单目摄像机采集 到的单幅图像,从二维空间转换到三维空间中,转换过程中利用摄 像机内参数(焦距和光心)和外参数(俯仰角,水平偏角以及相机高 度),得到一副没有透视效果的二维图像,转换后的图像效果是道路 的俯视图像。
特征提取
(c)逆透视变换
车道线检测——直线检测
霍夫变换检测直线原理:它是将原始图像空间中给定的
直线上的点转换成为参数空间中的一条直线,即在原始图像中 的直线上的所有点经过转换以后都会集中在变换空间中的某 个点上形成峰值点。这样就将直线的检测问题简化成找寻峰 值点的问题。
车道线检测——直线检测
干扰信息 干扰信息
有用信息
有用信息
车道线检测——直线检测
车道图片进一步处理:干扰信息尽可能截掉,保留有用信息。 否则容易造成误检测!
霍夫变换检测到的直线(直线过多!!!)
车道线检测——直线检测
霍夫变换检测直线
通过调整霍夫变换的阈值参数(如检测出的直线的长 度),以及用直线的角度剔除一些直线,删选出车道线