简易风洞
小型风洞实验报告总结(3篇)

第1篇一、实验背景与目的随着现代工业和航空技术的发展,对空气动力学特性的研究日益重要。
风洞实验作为一种重要的空气动力学研究方法,能够有效地模拟真实飞行器或其他物体在空气中的运动状态。
本实验旨在通过小型风洞实验,研究特定模型在不同风速和攻角下的空气动力学特性,为后续设计优化提供数据支持。
二、实验原理与设备1. 实验原理:风洞实验基于流动相似原理,通过模拟实际飞行器或其他物体在空气中的运动状态,研究其空气动力学特性。
实验过程中,通过控制风速、攻角等参数,观察模型在不同工况下的运动状态,分析其空气动力学特性。
2. 实验设备:- 小型风洞:用于产生均匀气流,模拟实际飞行器或其他物体在空气中的运动状态。
- 模型:根据实验需求设计,用于模拟真实飞行器或其他物体。
- 数据采集系统:用于实时采集实验数据,包括风速、攻角、模型姿态等。
- 计算机软件:用于数据处理和分析。
三、实验过程1. 实验准备:根据实验需求,设计模型并加工制作。
安装数据采集系统,调试风洞设备。
2. 实验步骤:- 调整风洞风速,使模型处于预定攻角。
- 记录风速、攻角、模型姿态等数据。
- 改变攻角,重复上述步骤。
- 分析实验数据,得出结论。
3. 实验数据:实验过程中,记录了风速、攻角、模型姿态等数据,并对数据进行整理和分析。
四、实验结果与分析1. 实验结果:通过实验,得到了模型在不同风速和攻角下的空气动力学特性数据。
2. 数据分析:- 随着风速的增加,模型的升力系数和阻力系数逐渐增大。
- 随着攻角的增加,模型的升力系数逐渐增大,阻力系数逐渐减小。
- 在特定风速和攻角下,模型具有最佳空气动力学特性。
五、结论与讨论1. 结论:通过小型风洞实验,研究了特定模型在不同风速和攻角下的空气动力学特性,为后续设计优化提供了数据支持。
2. 讨论:- 实验结果表明,模型在特定风速和攻角下具有最佳空气动力学特性,有利于提高飞行器的性能。
- 实验过程中,风速和攻角对模型的空气动力学特性有显著影响。
简易风洞的高层结构风振模拟实验

简 易 风 洞 的高层 结构 风 振 模 拟 实验
李鲁英 李 龚 程 涛
( 石理 工 学院 土木建 筑2 程 学院 ,湖北 黄 石 4 50 ) 黄 - - 303
摘 要: 高层建筑 的横向风振现象 ( 振动方向与风向垂直) 是建筑设计师不得不考虑 的因素 。通过制
作 简 易风 洞 箱 , 功模 拟 出高 层建 筑 模 型 的横 向风 振 现 象 , 成 并采 用 不 同高 宽 比的 建 筑模 型 进 行 实 验 , 测 试 出横 向风 振 起 主导 作用 的高 宽 比。运 用 矩形 立 面建 筑模 型 与 锯齿 形转 角立 面 模 型 的 幅度 对 比实
S m u a i n Ex e i e to i d — i d c d Vi r to i l to p rm n f W n — n u e b a i n o i h — r s t u t r f S m p i e i d Tu n l fH g — ie S r c u e o i l d W n n e i f
L u n L a C E a /L t g IY h H NG T o i
简易风洞及控制系统设计
1 设计 任务
本设 计 为我 指 导 的 2 0 1 4年 电子 设 计 大 赛 题 目 , 要 求 实现一 个 简易风 洞控 制 系统 。硬件 方 面 , 我 们将 设 计 分为四个模块 , 分别是 电机驱动模块 , 超声波传感器模 块, 单 片机模 块 和液 晶显示模 块 。单 片机 和 电机 驱 动用 于控制风力的大小和稳定性 , 超声波模块利用超声波传 感 器对 简易 风 洞 内乒 乓 球 的位 置进 行 判 断 。液 晶显 示 模 块可 以实 时监测 小 球 的运 动情 况 。软 件方 面 , 我 们利 用K E I L软 件 进 行 单 片机 编 程 , 利用 P R O T E U S软 件 实 现模 拟仿 真 。 2 方 案论证 2 . 1 圆管 的选择 方 案一 : 使 用不 透 明 的 P V C管 , 需 要 开凿 一个 3 0 c m 的 长 条 形槽 孔来 观 察 乒 乓 球 的位 置 , 并 需 要 将 槽 用 胶 带 粘 好, 保证 密封 性 , 但是 观察 不够 直观 , 且容 易 出现密 封 不 好 的 现象 。 方 案二 : 选择使用透明的有 机玻璃管 , 透 明度好 , 密封 良好 且 不 易损坏 , 更 容易 加工 。 综上 , 我们最终选择使用有机玻璃管。 2 . 2 支架的 选择 方案一 : 直接使 用 四根 长螺 丝 固定 风 扇 , 再 用 圆管 和 风扇 连 接 固定。但密封性稍差 , 且 当玻璃管上方加传感 器后 , 高度 增加 , 导致 重心 不稳 , 稳定 性 不够 。 方案 二 : 使用 4 m m 粗 铁丝 制作 圆盘 底座 , 底座 上 加有铁 块 配重 增加 稳定 性 , 底 座 上有支 架分 别支 撑 有机 玻 璃管 的 上部 与风 扇底 部 , 稳 定性 较好 。 综合 考虑 各种 因素 , 我们 最 终选择 方 案二 。
简易风洞及控制系统设计

过D超过D维持BC段管口A处2球放入自
动启动பைடு நூலகம்动正常下落不超
过D超过D维持BC段管口A处3球放入自
动启动启动正常下落不超
过D超过D维持BC段管口A处
分析:小球放入后可以自动启动,但是风力调整不好,主要是由于占空比调节不好导致风力过大,小球不能维持在BC段。
(5)小球AB-CD段往返运动
方案一:
直接使用四根长螺丝固定风扇,再用圆管和风扇连接固定。但密封性稍差,且当玻璃管上方加传感器后,高度增加,导致重心不稳,稳定性不够。
方案二:
使用4 mm2粗铁丝制作圆盘底座,底座上加有铁块配重增加稳定性,底座上有支架分别支撑有机玻璃管的上部与风扇底部,稳定性较好。
综合考虑各种因素,我们最终选择方案二。
(3)LCD显示小球高度位置及小球维持状态计时,测试结果如下表:
次数LCD显示小球
高度/s实际小球
高度/sLCD维持
状态计时/s实际计时/s1404155227266739777
分析:由以上数据得,超声波测距工作不是太稳定,容易受外界因素影响。
(4)风机自动启动部分测试数据如下表:
次数要求实际情况要求实际情况要求实际情况1球放入自
次数要求实际情况要求
时间/s实际
计时/s123AB维持3~5 s,CD维持3~5 s,再AB维持3~5 s,CD维持3~5 s,冲出圆管能上下运动,但不到规定段位,可以冲出能上下运动,但不到规定段位,可以冲出能上下运动,但不到规定段位,可以冲出3030301622255结论
(1)电机的选择上出现了错误,开始选用步进电机,转速不够,在风洞系统中乒乓球无法被现在的风力吹起来,通过更换电机得到改善。
所以,综上考虑,最终我们选择HC-SR04超声波传感器。
教你制作小风洞
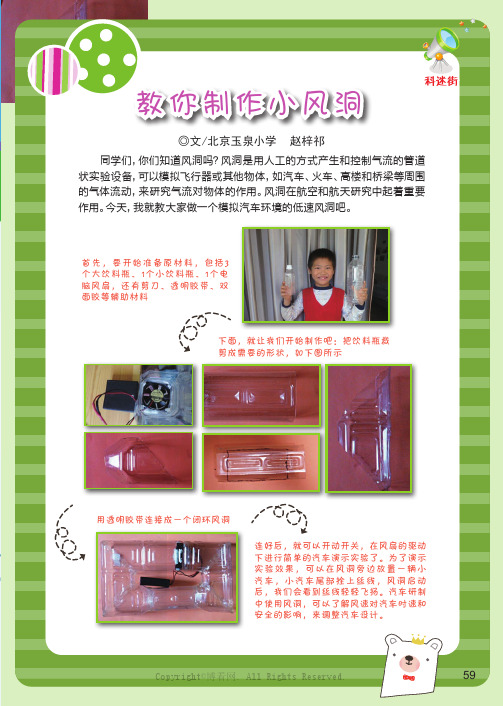
同学们,你们知道风洞吗?风洞是用人工的方式产生和控制气流的管道状实验设备,可以模拟飞行器或其他物体,如汽车、火车、高楼和桥梁等周围的气体流动,来研究气流对物体的作用。
风洞在航空和航天研究中起着重要作用。
今天,我就教大家做一个模拟汽车环境的低速风洞吧。
◎文/北京玉泉小学 赵梓祁
教你制作小风洞
科迷街
首先,要开始准备原材料,包括3
个大饮料瓶、1个小饮料瓶、1个电
脑风扇,还有剪刀、透明胶带、双
面胶等辅助材料
下面,就让我们开始制作吧:把饮料瓶裁
剪成需要的形状,如下图所示
用透明胶带连接成一个闭环风洞
连好后,就可以开动开关,在风扇的驱动
下进行简单的汽车演示实验了。
为了演示
实验效果,可以在风洞旁边放置一辆小
汽车,小汽车尾部拴上丝线,风洞启动
后,我们会看到丝线轻轻飞扬。
汽车研制
中使用风洞,可以了解风速对汽车时速和
安全的影响,来调整汽车设计。
59Copyright©博看网. All Rights Reserved.。
简易风洞及控制系统
简易风洞及控制系统(G题)摘要:本帆板控制系统由单片机ATMEGA328作为帆板转角的检测和控制核心,实现按键对风扇转速的控制、调节风力的大小、改变帆板转角θ、液晶显示等功能。
引导方式采用角度传感器感知与帆板受风力大小的转角θ的导引线。
通过PWM波控制电机风扇风力的大小使其改变帆板摆动的角度θ。
风扇控制核心采用L298电机驱动模块,用ATMEGA328单片机为控制核心,产生占空比受数字PID 算法控制的PWM脉冲,实现对直流电机转速的控制,同时利用光电传感器将电机速度转化成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
MMA7455三轴加速传感器把角度输出信号传送给ATMEGA328单片机进行处理。
关键词:ATMEGA328,MMA7455,PWM波,PID算法目录1. 系统设计1.1 任务与要求1.1.1 主要任务1.1.2 基本要求1.1.3 说明1.2总体设计方案1.2.1 设计思路·1.2.2 方案论证与比较1.2.3 系统的组成2. 单元电路设计2.1 风速控制电路2.2小球测距原理2.3控制算法3. 软件设计3.1风速控制电路设计计算3.2控制算法设计与实现3.3程序流程图4. 系统测试4.1 调试使用的仪器与方法4.2 测试数据完整性4.3 测试结果分析4.4 结束语5. 总结参考文献附录1 元器件明细表附录2 电路图图纸附录3 程序清单1.系统设计1.1任务与要求1.1.1 主要任务设计制作一简易风洞及其控制系统。
风洞由圆管、连接部与直流风机构成,如图所示。
圆管竖直放置,长度约40cm,内径大于4cm且内壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运动;管体外壁应有A、B、C、D等长标志线,BC段有1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。
控制系统通过调节风机的转速,实现小球在风洞中的位置控制。
简易风洞控制系统设计
简易风洞控制系统设计【摘要】本设计主要通过MSP430单片机控制直流风机完成简易风洞试验。
风洞由圆管,连接部与直流风机构成,由单片机产生PWM控制直流风机的转速,通过红外对管阵列采集光强信息检测小球在圆管中的位置,同时由12864液晶显示小球的高度位置及维持状态的时间,从而实现小球在简易风洞中的位置控制。
【关键词】风洞;MSP430;控制系统1.引言风洞,是指在一个管道内,用动力设备驱动一股速度可控的气流,用以对模型进行空气动力实验的一种设备。
最常见的是低速风洞。
但由于风洞造价过高,导致对气流研究成本偏高。
所以本次设计为一个简单的风洞,可以在导管中研究小球漂浮时气流对它的影响。
2.总体设计方案本系统主要由主控板模块、测距模块、显示模块、电机驱动模块、电源模块组成,系统方框图如图1所示。
图中MSP430控制器模块为系统的核心部件,按键和液晶显示器用来实现人机交互功能,其中通过键盘将需要设置的参数和状态输入到单片机中,并通过控制器显示到液晶屏上。
在运行过程中控制器产生PWM 脉冲送到风机驱动电路中,控制直流电机转速,同时控制器经过数字PID运算后改变PWM脉冲的占空比,实现电机转速达到实时、准确控制的目的。
图1 系统总体框图3.硬件设计3.1 微控制器电路设计MSP430是一个超低功耗的16位单片机,它处理速度快、运算能力强、功耗低、片内资源丰富、开发方便。
其最小系统如图2所示。
3.2 传感器电路设计传感器部分采用红外对管进行小球位置点信息的采集。
红外分为两个部分,一个部分为发射,另外一部分为接收,每当小球穿过红外的时候,电路会给主控芯片送入低电平,从而达到判断小球位置的目的。
电路图如图4所示。
图2 MSP430单片机最小系统电路原理图图3 红外测距模块电路原理图3.3 直流风机驱动电路设计电机驱动芯片L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
基于MSP430F5529的简易风洞控制系统设计
基于MSP430F5529的简易风洞控制系统设计胡进德;付晓军【摘要】基于MSP430F5529设计了一个简易风洞控制系统.选用超声波传感器检测乒乓球在简易风洞中的位置,微控制器MSP430F5529通过对乒乓球当前位置的分析判断控制直流电机的转速,从而完成对乒乓球升降高度的实时控制.【期刊名称】《微型机与应用》【年(卷),期】2016(035)006【总页数】3页(P88-90)【关键词】MSP430F5529;超声波传感器;实时控制【作者】胡进德;付晓军【作者单位】仙桃职业学院,湖北仙桃433000;仙桃职业学院,湖北仙桃433000【正文语种】中文【中图分类】TP273本设计实现一个简易风洞控制系统。
风洞由圆管、连接部与直流风机构成,如图1所示。
圆管竖直放置,长度约40 cm,内径大于4 cm,且内壁平滑,小球(直径4 cm的黄色乒乓球)可在其中上下运动;管体外壁有A、B、C、D 等长标志线,BC 段有1 cm 间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部有防止小球落入连接部的格栅。
控制系统通过调节风机的转速,实现小球在风洞中升降高度的实时控制。
系统在小球到达设定位置时可声光报警并显示小球的升降高度和动作时间等参数。
系统主要由超声波传感器检测电路、直流电机驱动电路、显示电路、报警电路、MSP430F5529微控制器、电压转换电路等模块构成。
系统硬件结构如图2所示。
选用合适的超声波传感器检测小球在风洞中的位置,超声波传感器将小球位置信号转换成电信号,由MSP430F5529微控制器记录和分析处理。
MSP430F5529调节直流电机的转速,由此调节风力的大小从而实现对小球升降高度的自动测量与控制。
2.1 小球位置检测与报警电路采用超声波测距模块HY-SRF05检测乒乓球在简易风洞中的位置。
HY-SRF05超声波测距模块可提供2~450 cm的非接触式距离感测功能,检测精度高达3 mm。
简易风洞控制系统设计与实现
简易风洞控制系统设计与实现王皓;冯玉刚;胡旭光;周雄;薛志国;邓彬伟【期刊名称】《山西电子技术》【年(卷),期】2015(000)004【摘要】系统通过高速直流电机带动风扇旋转产生风压,在管道内产生空气流动,构成简易风洞.设计了以MSP430F149单片机为核心的控制系统,该系统由MSP430单片机最小系统、超声波检测、电机驱动、液晶显示器以及键盘控制,语音播报模块构成;通过PID核心算法,输出可调占空比的PWM波,驱动小球的上下移动;并通过超声波位置检测模块,实时检测小球的高度.试验结果表明该控制系统具有响应速度快、控制精度高、抗干扰能力强等优点.【总页数】3页(P19-21)【作者】王皓;冯玉刚;胡旭光;周雄;薛志国;邓彬伟【作者单位】湖北理工学院电气与电子信息工程学院,湖北黄石435003;湖北理工学院电气与电子信息工程学院,湖北黄石435003;湖北理工学院电气与电子信息工程学院,湖北黄石435003;湖北理工学院电气与电子信息工程学院,湖北黄石435003;湖北理工学院电气与电子信息工程学院,湖北黄石435003;湖北理工学院电气与电子信息工程学院,湖北黄石435003【正文语种】中文【中图分类】TP273【相关文献】1.一种简易风洞模拟控制系统设计 [J], 王晨;吴凡;王晓娜;2.一种简易风洞模拟控制系统设计 [J], 王晨;吴凡;王晓娜3.基于ATmega328P的简易风洞控制系统的设计 [J], 彭耀仟4.基于模糊PID的简易风洞控制系统设计 [J], 余云飞; 李中望; 邓旭辉; 段争光; 沈璐5.基于模糊PID的简易风洞控制系统设计 [J], 余云飞; 李中望; 邓旭辉; 段争光; 沈璐因版权原因,仅展示原文概要,查看原文内容请购买。
简易风洞装置的设计
简易风洞装置的设计本设计主要通过MSP430单片机控制直流风机完成简易风洞实验装置。
该装置用小球模拟飞行器,通过红外对管阵列采集光强信息检测小球在圆管中的位置,由单片机产生PWM信号控制直流风机的转速,使小球维持在设定的高度和状态,由12864液晶显示小球的高度及维持状态的时间,实现小球在简易风洞中的位置控制。
标签:风洞MSP430 PWM一、引言风洞实验室,是指以人工的方式产生并且控制气流,用来模拟飞行器或实体周围气体的流动情况,并可量度气流对实体的作用效果以及观察物理现象的一种管道状实验设备[1]。
该实验是飞行器研制工作中的一个不可缺少的组成部分,一款新的飞行器成功推出必须通过风洞实验。
由于风洞的控制性佳,可重复性高,所以风洞实验不仅应用于航空航天工程,而且在交通运输、房屋建筑、风能利用等领域也广泛地应用。
2015年,在学校的职业生涯规划课中,我有幸参观了西南交通大学的XNJD-3风洞并体验了风洞的神奇效果,为此,我一直念念不忘自己设计一个简易的风洞装置。
终于在暑假期间,在老师的指导下,网上购买器材和元件,搭建并编程制作了一个简易风洞装置。
二、系统设计与实现1.方案设计风洞装置由圆管、连接部与直流风机构成,如图2.1所示。
风洞竖直放置,内径大约4.5cm且内壁透明平滑,小球可以在其中上下运动;管体外壁标有A、B、C、D标志线,BC段有1cm间隔的短标志线;风机在风洞的底部,上面有防止小球落入的格栅。
测试人员通过键盘输入小球的位置信息,调节风机的转速,实现小球在风洞中的位置控制。
按照控制要求,系统主要由主控模块、测距模块、显示模块、键盘输入模块、电机驱动模块、电源模块组成。
系统控制框图如图2.22.电路设计系统主控模块采用TI公司的MSP430F149,此款单片机功耗低、有看门狗(WDT)、模拟比较器、16位定时器、液晶驱动器、10 /12位ADC、PWM等丰富的内外设,性价比高[2]。
电源模块通过降压、整流滤波、稳压处理(如7812、7805等)形成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
共1页,G-1 2014年陕西省TI 杯大学生电子设计竞赛题
G 题:简易风洞及控制系统(高职)
1. 任务
设计制作一简易风洞及其控制系统。
风洞由圆管、连接部与直
流风机构成,如右所示。
圆管竖直放置,长度约40cm ,内径大于
4cm 且内壁平滑,小球(直径4cm 黄色乒乓球)可在其中上下运动;
管体外壁应有A 、B 、C 、D 等长标志线,BC 段有1cm 间隔的短标
志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管
的气密性连接,圆管底部应有防止小球落入连接部的格栅。
控制系
统通过调节风机的转速,实现小球在风洞中的位置控制。
2. 要求
(1) 小球置于圆管底部,启动后5秒内控制小球向上到达BC
段,并维持5秒以上。
(20分)
(2) 当小球维持在BC 段时,用长形纸板(宽度为风机直径的
三分之一)遮挡风机的进风口,小球继续维持在BC 段。
(10分)
(3) 以C 点的坐标为0cm 、B 点的坐标为10cm ;用键盘设定小球的高度位置(单
位:cm ),启动后使小球稳定地处于指定的高度3秒以上,上下波动不超过±1cm 。
(10分)
(4) 以适当的方式实时显示小球的高度位置及小球维持状态的计时。
(10分)
(5) 小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A 端,且不跳
离,维持5秒以上。
(10分)
(6) 小球置于圆管底部,启动后30秒内控制小球完成如下运动:向上到达AB 段
并维持3~5秒,再向下到达CD 段并维持3~5;再向上到达AB 段并维持3~5,再向下到达CD 段并维持3~5;再向上冲出圆管(可以落到管外)。
(20分)
(7) 风机停止时用手将小球从A 端放入风洞,小球进入风洞后系统自动启动,控制
小球的下落不超过D 点,然后维持在BC 段5秒以上。
(10分)
(8) 其他自主发挥设计。
(10分)
(9) 设计报告。
(20分) 项
目
主要内容 分数 系统方案
方案比较,方案描述 5 设计与论证
风洞控制实现方法 电路设计及参数计算 8 测试
测试方法与测试结果 5 设计报告结构及规范性
摘要,正文结构完整性、内容规范性 2 小计
20
3.说明
(1)题中“到达XX段”是指,小球的整体全部进入该段内;
(2)题中“维持”是指,在维持过程中小球整体全部不越过该段的端线;
(3)小球的位置以其中心点为准(即小球的上沿切线向下移2cm,或下沿切线向上移2cm);
(4)直流风机的供电电压不得超过24V,注意防止风机叶片旋转可能造成的伤害;
可在圆管及其周围设置传感器检测管内小球的位置;可将圆管、连接部与直
流风机安装在硬质板或支架上,以便于使圆管保持竖直状态,并保持风洞气
流通畅。
(5)每一个项目最多进行三次测试;对于任何测试项目,测试专家可要求进行重复测试。
(6)风洞制作方法参考:
圆管长度约40mm,可以选用透明的有机玻璃(或亚克力材料)圆管,也可以选用不透明的PVC圆管。
圆管的内直径必须大于40mm,保证小球(直径为40mm的乒乓球)在管内能够自由运动。
如果选用不透明的PVC圆管,为了能够方便直观地观察管内小球的位置,可以在管臂上沿轴线方向开凿宽度约5mm的长条形槽孔,再用宽的透明胶带贴在槽孔上,保证圆管的气密性。
开凿长条形槽孔后,应清除管壁内的残屑,以免影响小球的运动。
为了防止小球落入连接部,可将一根细铁丝或导线,用AB胶或透明胶带粘在圆管下端口处。
连接部的材料可以采用冰箱保鲜袋。
剪去袋底封口部分,得到一个两端开口的塑料薄膜“软管”。
将“软管”的一端包住圆管的下端口,并用透明胶带将重叠部分缠紧;将软管的另一端包住直流风机出风口的外沿,并用透明胶带将重叠部分缠紧。
注意直流风机的风向,应向连接部方向吹风。
可将风洞的圆管、直流风机部分固定在一块硬质板上,再固定硬质板,使圆管保持竖直状态;也可做一个三脚支架,将风洞的圆管部分固定在支架上并保持竖直状态,直流风机垂挂在圆管下方。
直流风机的进风口处应留有足够的空间,保证气流通畅。
共1页,G-2。