掘进机电动机过载保护的算法优化
基于ABAQUS的采煤机截割部电机过载保护装置研究

文 献 标 识 码 :A
文 章 编 号 :1002—6886(2018)03—0120—04
Research on overload protection device of shearer cutting unit motor based on ABAQUS
SO N G Ying
A bstract:Aiming at the overload protection of cutting unit m otor,the overload protection mode of different types of m otor on the shearer was analyzed.Then the assembly structure and the design requirements for torque axis of the elastic torque shaft protection mode were studied.The torque axis param eters of YBCS 一 900 cutting m otor were calculated by means of material mechanics method.At last.in view of the limitations of theoretical calculation.the stress distribution of V —shaped and U —
O 引 言
双 滚筒 采煤 机是 我 国现 代 化综 采工 作 面 的重要 机械设备 ,其工作状 态稳定 、自动化程度高 ,可较大 幅度 降低 井 下工 作 人 员 的劳 动 强 度 和 物 料 消 耗 ,且 增产 和稳 产 效果 明显 ,因此 在 我 国各 大 煤 矿 应 用 广 泛 。
电动机热过载保护校验方法

电动机热过载保护校验方法《电动机热过载保护校验方法》嘿,朋友!今天我要跟你唠唠电动机热过载保护校验这个事儿,这可是个超级重要的技能哦!首先,咱得搞清楚为啥要校验。
你想啊,电动机就像咱们人的心脏一样,要是不好好保护,出了问题那可就麻烦大啦!热过载保护就是给电动机穿上一件“防护服”,确保它在工作的时候不会因为过热而“生病”甚至“挂掉”。
接下来,咱们开始第一步,准备工具。
你得有电流表、电压表、温度计,还有相关的测试设备,这就好比战士上战场得有枪有炮一样。
可别小看这些家伙,没它们,咱们可没法打仗!第二步,了解电动机的参数。
这就像是要知道一个人的身高体重、脾气性格一样。
得清楚电动机的额定电流、额定功率、绕组绝缘等级等等。
不然,你怎么知道给它穿多大号的“防护服”呢?第三步,设置热过载保护装置的参数。
这一步可关键啦!就像给人量体裁衣,不能大了也不能小了。
要是设置得过大,电动机都快烧着了保护装置还没反应,那不就凉凉了;要是设置得太小,电动机稍微一用力,保护装置就“哇哇叫”,那也不行,会影响正常工作的。
我跟你说个我自己的奇葩经历,有一次我没好好设置这参数,结果电动机工作的时候,保护装置一直跳闸,我还以为是电动机坏了,折腾了半天,最后发现是我参数设置得太离谱,简直是自己给自己挖了个大坑!第四步,进行负载测试。
这就像是让电动机跑个马拉松,看看在不同的负载下它的表现如何。
在这个过程中,要密切关注电流、温度等参数的变化,就像盯着孩子考试的家长一样,一刻也不能放松。
第五步,根据测试结果调整保护装置的参数。
如果发现电流过大或者温度过高,那就得重新调整参数,直到达到最佳的保护效果。
这就像是给衣服修修改改,直到合身为止。
最后,再啰嗦一句,校验完了可别以为就万事大吉啦,还得定期检查,就像我们得定期体检一样。
不然,万一哪天保护装置“偷懒”了,电动机可就遭殃啦!好啦,朋友,这就是电动机热过载保护校验的方法,是不是也没那么难?赶紧去试试吧,让你的电动机健健康康地工作!。
电机过载保护解除方案
电机过载保护解除方案
电机过载保护解除方案:
1.检查电源电压:首先要确保电源电压正常,不低于额定电压。
如果电源电压过低,会导致电机工作困难,容易过载。
可以通过使用稳压器或改变电源线路来解决电源问题。
2.检查负载情况:确定负载情况是否超过电机额定负载能力。
如果负载过大,需要减少负载或更换更大能力的电机。
可以考虑增加传动装置的减速比,以减少负载对电机的要求。
3.检查电机散热:确保电机有良好的散热条件,防止过热造成
过载保护。
可以通过安装散热风扇、增加散热片等方式来提高电机的散热效果。
4.检查电机绝缘:用绝缘电阻表来检测电机的绝缘性能,确保
绝缘电阻在正常范围内。
如果绝缘电阻超出范围,可能会引起漏电或短路,导致过载保护。
5.检查电机运行环境:确保电机运行环境符合要求。
例如,电
机在潮湿、高温、腐蚀等环境中容易受到影响,容易出现过载保护。
要用适当的方法改善环境条件,提高电机的工作可靠性。
6.检查电机控制回路:检查电机控制回路是否正常工作,是否
有短路、接触不良等情况。
如果控制回路存在问题,可能会导致电机不能正常启动或工作,引起过载保护。
通过以上几种方法来解除电机过载保护,可以有效提高电机的工作效率和可靠性,延长电机的使用寿命。
但在解除过载保护后,仍需定期对电机进行维护和检修,及时发现和排除问题,防止事故的发生。
同步电动机的热过载保护算法
・
2 2・
煤
矿
机 电
20 08年第 3期
同步 电动 机 的热 过 载保 护算 法 术
李宁 , 冉祥 东
(. 1天津科技大学 电子信 息与 自动化学院 , 天津 302 ; . 022 2石家庄市液 化气 总公 司 , 河北 石家 庄 001) 50 1
摘
要: 为使 电动机故障前的工作状态能较真实地反映电动机故障情况下的发热状况, 运用对称
中 图分类 号 :M3 1 T 4 文献标 识 码 : A 文 章编 号 :0 1— 84 20 )3— 0 2— 3 10 07 (08 0 0 2 0
Th r l e la o e t n Ar h t o n h o o s Mo o e ma Ov r d Pr t c i i me i f rSy c r n u t r o o t c
Ke wo d s n h o o s mo o ;t e a v r a y r s: y c r n u tr h r l el d;i v re t i t m o o n e s i 1 me mi
浅析煤矿掘进机电气系统保护及故障诊断

浅析煤矿掘进机电气系统保护及故障诊断煤矿掘进机是煤矿开采中的重要设备,它通过掘进作业将煤矿进行开采。
电气系统作为掘进机的重要组成部分,对于掘进机的正常运行和安全性起着至关重要的作用。
煤矿掘进机的电气系统保护及故障诊断显得尤为重要。
本文将从保护和故障诊断两方面对煤矿掘进机的电气系统进行浅析。
一、煤矿掘进机电气系统保护1. 过载保护掘进机在作业过程中,可能会因为载荷过大而导致电气系统过载。
为了避免过载损坏设备,通常会在掘进机电气系统中设置过载保护装置。
过载保护装置一般是由过载继电器来实现,通过监测电气系统的电流来实时监测设备是否存在过载情况,一旦发现过载情况,就会及时切断电路,从而保护设备不受损坏。
过载保护对于掘进机的安全性和设备的寿命都起着非常重要的作用。
2. 短路保护短路是电气设备常见的故障之一,一旦发生,很容易引起火灾和爆炸等严重后果。
在掘进机电气系统中设置短路保护设备显得非常重要。
短路保护通常是通过熔断器或断路器来实现的,一旦电路发生短路,短路保护设备会迅速切断电路,避免短路危害继续扩大。
3. 漏电保护漏电是指电流从电气设备的绝缘外泄,可能会对人体造成触电危险。
针对这种情况,掘进机电气系统通常会设置漏电保护装置。
漏电保护装置通过监测电气系统的漏电情况,一旦发现有漏电现象,就会迅速切断电路,避免发生触电事故。
1. 设备故障判断在实际运行中,掘进机电气系统很可能会出现各种故障,比如电机停转、线路接触不良、电气元件损坏等。
对于这些故障,需要通过对设备进行观察和检测,分析设备的工作状态和故障现象,从而判断出故障的原因和范围。
2. 故障诊断方法针对不同的故障情况,可以采取不同的故障诊断方法。
比如对于断路故障,可以通过对电路进行连通性测试,逐一排查具体的线路是否存在断路;对于接地故障,可以通过绝缘测试来判断设备的绝缘情况;对于电机故障,可以通过检测电机的运行状态和电流特征来判断电机是否存在故障。
3. 故障修复措施一旦确定了设备的故障原因和范围,就需要采取相应的修复措施。
煤矿掘锚机电机保护系统探讨

随着中国煤矿开采规模的不断扩大,掘进技术也在不断改进。
掘锚机这一优秀的成熟产品在国外被广泛应用,但在国内仍处于起步阶段。
在煤矿回采工作中,采和掘的不平衡日益显著,根本原因是掘进速度与支护速度的不匹配[1],掘锚机的出现有效解决了该问题,将掘进与支护相融合在一起,并合理优化。
掘锚机通过省去掘进与支护的换位时间,增加煤矿开采速度,再配以先进的控制系统,最终达到了提高掘护速度的目的[2]。
然而实际生产中,该设备的支护效率大于掘进效率,仍然需要继续优化改进,以实现掘锚一体的同步。
实现这一终极目标的关键是控制系统的不断优化改进,控制系统体现在电机的综合保护、三车同步和功率匹配3个方面。
电机作为动力源,一旦发生故障,将会影响整个掘进设备的工作,且因为矿井内的环境恶劣,使得维修非常困难。
因此,对电机保护系统进行提升研究成为一项重点内容。
1电机保护系统电机电流幅值过载保护具有一定的缺陷,研究电机的有效保护方法显得尤为重要。
由于异步电机三相配电线路的不同特点,在不同状态下,因过载而烧损电机的原因各不相同,最终导致的事故程度也不相同。
故本文用对称分量法作为理论依据,对三相电机工作电流进行保护设计,再通过线圈内部的温度作为判断标准,从而建立热过载的反时限保护模式,最后通过硬件和软件设计,最终实现三相电机启动前的短路接地等各种故障的全面保护。
电机保护系统主要有以下几类[3]。
(1)热反时保护模式。
实际工况下,电机的热过载保护有后续这些需要,比如,掘进过程中若突遇硬度较高的煤矿,且掘进机正处于高速切割的运行状态,电机会呈超负荷运行,此时就需要电机控制系统按当前工作电流的过载百分比,对电机按二次方负曲线做时长的延时保护。
(2)三相不平衡判定模式。
三相不平衡的多种判定方法中,对称分量法是最有效的。
PLC程序中会实测三相电流,用对称分量法计算所需要的正序和负序电流,由此来判别三相是否平衡,最终对电机进行断电保护。
(3)接地故障判定模式。
电动机过热保护算例

电动机过负荷(过热)定值计算1过负荷的计算 t?I1 ——正序分量I2 ——负序分量Is ——额定电流k1 ——正序发热系数k2 ——负序发热系数τ 1 ——发热时间常数t ——出口时间k1的说明:其范围在0~1,不论设定为多少,启动时间结束后均自动变为1。
例如k1=0,则代表在启动时间内正序分量不参与过负荷的计算。
启动时间后按实际值计算。
一般推荐为0.1~0.3k2的说明:其范围在0~10,主要作用是当发生不对称故障时,加速过负荷动作,加速的能力取决于k2的大小,越大越快。
若k2=0,则代表负序分量不参与过负荷的计算,一般推荐为1.0。
τ1的说明:——其范围在1~9999,主要作用是决定一条反时限动作曲线,取值越大,曲线越靠上,即出口时间越长。
一般推荐为90。
t的说明:——当上面各值确定后,t就可以计算出来。
另外还有相关的几个参数τ2——散热时间常数,一般推荐0.1θalarm——热告警系数,一般推荐0.5,即提前一半告警tstart——启动时间,按真实最大启动时间乘以可靠系数得来具体举例:某电动机一次额定电流为434A,启动时间为10秒,过负荷的要求是当发生2倍过负荷时,延时30秒跳闸出口,CT变比800/5即: ?1k1.(I1/Is)2?k2.(I2/Is)2?1.052 tstart = kk . 实际值=1.2 x 10 = 12秒①根据2倍运行30秒计算。
434AIs??2.7A800/530?τ1实际可取90说明:此步计算时,不考虑负序加速的问题,故k2(I2/Is)项取0;同时计算是考虑在正常运行过程中而非启动过程,故k1取1.0②为保证能够可靠启动,反推k1,设启动电流为6倍额定 ?1?1????1?86.925k1x(2)2?1.0524?1.05212?k1实际可取0.24说明:此步计算时,同样不考虑负序加速的问题,由于启动过程中电流并非始终保持在6倍,所以按6倍计算出的k1一定能保证可靠启动。
电机过载保护方式
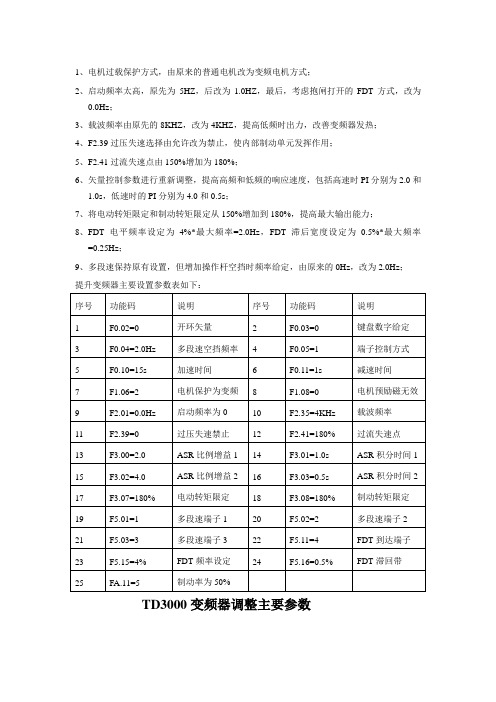
1、电机过载保护方式,由原来的普通电机改为变频电机方式;
2、启动频率太高,原先为5HZ,后改为1.0HZ,最后,考虑抱闸打开的FDT方式,改为
0.0Hz;
3、载波频率由原先的8KHZ,改为4KHZ,提高低频时出力,改善变频器发热;
4、F2.39过压失速选择由允许改为禁止,使内部制动单元发挥作用;
5、F2.41过流失速点由150%增加为180%;
6、矢量控制参数进行重新调整,提高高频和低频的响应速度,包括高速时PI分别为2.0和
1.0s,低速时的PI分别为4.0和0.5s;
7、将电动转矩限定和制动转矩限定从150%增加到180%,提高最大输出能力;
8、FDT电平频率设定为4%*最大频率=2.0Hz,FDT滞后宽度设定为0.5%*最大频率
=0.25Hz;
9、多段速保持原有设置,但增加操作杆空挡时频率给定,由原来的0Hz,改为2.0Hz;
提升变频器主要设置参数表如下:
TD3000变频器调整主要参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
掘进机电动机过载保护的算法优化作者:朱军帅陈辉
来源:《机电信息》2020年第06期
摘要:對于掘进机电动机的过载保护,宜采用反时限保护的思想,为在微机计算中实现该思想,引入电流—时间关系式,从而引入发热常数K;然后根据少量已知的电动机过载保护要求,求得K值的保护限值;对K值进行累加计算,当K值超过限值时即发出电动机保护指令。
现对优化后的微机算法代码进行举例说明,该算法相较于传统的分段式算法更为准确,特别是对于动态过载的情况,其效果尤为明显。
关键词:电动机;过载;微机;反时限;算法
0 引言
对电动机的保护应将温度保护和热(电流)保护两者结合,组成温度—电流保护,这是一种比较理想的过负荷保护方式[1]。
目前,以微机为基础的热(电流)保护,以其处理数据灵活、适用范围广等特点,得到了越来越广泛的应用[2]。
本文主要讨论以微机为基础的悬臂式掘进机的电动机热(电流)保护算法。
1 标准算法
矿用悬臂式掘进机电控系统执行标准《悬臂式掘进机电气控制设备》(MT/T 971—2005),其中要求对掘进机电动机的过载短路保护应符合表1的规定[3]。
若按照表1所列数据执行,对于1.20倍过载保护和1.50倍过载保护,在微机上的ST语言代码表达如下:
IF Current_real>(Current_rated*1.20) THEN
Mid_120:=TRUE;
ELSE
Mid_120:=FALSE;
END_IF
TON_120(IN:=Mid_120,PT:=T#1200S);
IF TON_120.Q THEN
Overload_current_120:=TRUE;
END_IF
(*1.2倍过载1 200 s*)
IF Current_real>(Current_rated*1.50) THEN
Mid_150:=TRUE;
ELSE
Mid_150:=FALSE;
END_IF
TON_150(IN:=Mid_150,PT:=T#180S);
IF TON_150.Q THEN
Overload_current_150:=TRUE;
END_IF
(*1.5倍过载180 s*)
IF Overload_current_120 OR Overload_current_150 THEN Motor_stop:=TRUE;
ELSE
Motor_stop:=FALSE;
END_IF
(*过载后电动机停止*)
IF Reset THEN
Overload_current_120:=FALSE;
Overload_current_150:=FALSE;
END_IF
(*复位*)
备注:Current_real—实时电流;Current_rated—额定电流(整定电流);Mid_120—1.2倍过载计算的中间变量;Overload_current_120—1.2倍过载;Motor_stop—电动机停止;Reset—复位。
对于表1所述及其在微机上的算法,有两个问题:
(1)在1.5倍至6倍过载之间,数据缺失,没有2倍、3倍、4倍、5倍等过载的动作时间。
(2)算法不够合理。
掘进机负载是一直变化的,电流也随之变化,过载倍数也是一直变化的,那么过载保护的时间也应当是实时变化的,上文分段式算法无法准确反映动态过载的情况[4]。
2 算法优化
对于电流频繁变化的电动机宜采用反时限电流保护[2]。
采用反时限电流保护方法,首先要建立电流—时间的关系式。
电动机短时过负荷时,发热时间短,发热量大,电动机绕组在最初发热时与铁芯间存在热绝缘,且铁芯质量大而发热缓慢,所以短时过负荷状态的电动机的发热状态应由绕组发热时间常数T′决定[1]。
额定稳态后的过载保护时间可用下式表示:
式中,t为额定稳态后的过载保护时间(s);θn为额定稳态温升(℃);Δθ为超出θn的温升(℃);Tn′为额定稳态时的绕组发热时间常数(s);IZ为电流倍数,IZ=I/In。
变形得:
则过载电流倍数与保护时间的关系式为[1]:
采用反时限过流保护算法时,绕组发热时间常数T′一般应由电动机制造商提供,但国内制造商一般都不提供此数据,我们可以根据制造商提供的其他数据或相应标准来计算[5]。
有多种方法可以计算K值大小,我们可以根据已知的电动机过载负荷能力对K值进行计算,根据表1数据计算K值:
1.2倍过载时:
1.5倍过载时:
二者取小,则K=225。
由此我们可以反推2倍、3倍、4倍、5倍等其他倍数的过载保护时间,如3倍电流过载的保护时间则为:
在变化过载电流条件下,为了在微机中实现电动机过载保护的计算,我们可以对K值进行累加计算,在微机上的ST语言代码表达如下:
IF Num
Num:=Num+1;
Current_real_sum:=Current_real_sum+Current_real;
END_IF
IF Num=5 THEN
Current_real_average:=Current_real_sum/Num
(*计算5个数据采集周期内的电流平均值,5可调*)
Multiple_current:=(Current_real_average/Current_rated)
K1:=(Multiple_current*Multiple_current-1)*Num*Cycle;
K:=K+K1;
Num:=0;
Current_real_sum:=0;
END_IF
(*計算K值*)
IF K>225 THEN
Motor_stop:=TRUE;
END_IF
IF K
K:=0
END_IF
(*电动机停止*)
IF Reset THEN
Motor_stop:=FALSE;
END_IF
(*复位*)
备注:Num—计数,初始值为0;Current_real—实时电流;Current_real_sum—实时电流求和;Current_real_average—时间元内的电流平均值;Multiple_current—电流倍数;Current_
rated—额定电流;Cycle—实时电流的采集周期;K1—K值计算的中间变量;K—过载K值累加值,初始值为0。
考虑到计算量的问题,所以引入了Current_real_average—时间元内的电流平均值,如果微机计算能力允许的话,时间元应尽量取小,时间元越小则计算结果越真实准确,最小直接取数据采集周期Cycle的大小,此时Num取1。
3 结语
对于掘进机电动机的过载保护,宜采用反时限保护的思想。
本文引入电流—时间关系式,对关系式中的K值进行累加计算,当K值超过限值时即发出电动机保护指令,从而将该控制思想融入到了微机上的实际算法中。
该算法相较于传统的分段式算法更为准确,特别是对于动态过载的情况,其效果尤为明显。
[参考文献]
[1] 王维俭.电气主设备继电保护原理与应用[M].北京:中国电力出版社,1997.
[2] 黄彦全,肖建,蔡勇,等.新型微机反时限电流保护时间—电流特性的工程应用[J].电力系统自动化,2003,27(23):71-73.
[3] 悬臂式掘进机电气控制设备:MT/T 971—2005[S].
[4] 牟龙华,邢锦磊.反时限过载保护精确算法[J].电力自动化设备,2008,28(6):36-38.
[5] 郑蔚,温佶强,王宁.数字式电动机过热保护的整定计算[J].浙江电力,2007,26(4):30-31.
收稿日期:2019-12-24
作者简介:朱军帅(1985—),男,江苏徐州人,工程师,研究方向:机械电气自动化。