视频目标跟踪和分割汇报总结
目标跟踪Visual Object Tracking总结汇报(STCT、MD-Net、SiamFC)

STCT:Sequentially Training Convolutional Networks for Visual Tracking
网络结构示意图:
STCT:Sequentially Training Convolutional Networks for Visual Tracking
STCT模型图
MDNet: Learning Multi-Domain Convolutional Neural Networks for Visual Tracking
出发点:
大部分算法只是用在大量数据上训练好的(pretrain)的一些网络如VGG作为特征提取器,这些做法 证实利用CNN深度特征对跟踪结果有显著提升。 1、对于跟踪问题来说,CNN应该是由视频跟踪的数据训练得到的更为合理。所有的跟踪目标,虽然类别 各不相同,但其实他们应该都存在某种共性,这是需要网络去学的。 2、用跟踪数据来训练很难,因为同一个object,在某个序列中是目标,在另外一个序列中可能就是背 景,而且每个序列的目标存在相当大的差异,而且会存在各种挑战,比如遮挡、形变等等。 3、现有的很多训练好的网络主要针对的任务比如目标检测、分类、分割等的网络很大,因为他们要分 出很多类别的目标。而在跟踪问题中,一个网络只需要分两类:目标和背景。而且目标一般都相对比较 小,那么其实不需lly Training Convolutional Networks for Visual Tracking
视觉目标跟踪任务就是在给定某视频序列初始帧的目标 大小与位置的情况下,预测后续帧中该目标的大小与位置。
STCT:Sequentially Training Convolutional Networks for Visual Tracking
视频目标对象检测与跟踪方法概述

采用基于帧间图像强度守衡的梯
通过特征匹配求得特征点处的光流
度算法来计算光流
10
视频目标检测方法-背景减除法
背景减除法是将视频帧与背景模型进行比较,通过判定灰度等特征的变化,或用直方图等统计 信息的变化来判断异常情况的发生和分割出运动目标。如果当前图像的象素点和背景图像的象 素点灰度值差别很大,就认为此象素点有目标存在;相反,如果当前图像的象素点和背景图像 的象素点灰度值差别较小,在一定的阈值范围内,就认为此象素点为背景象素点。
质心跟踪法
边缘跟踪法
场景锁定法
组合跟踪法
这种跟踪方式主要用 于跟踪有界目标,如 飞机,目标和背景的 差异较大。目标完全 在视频画面内,跟踪 时,常常需要用一些 图像预处理算法,如 对比度增强、图像去 噪、双极性增强等。
当要跟踪的目标有一 个或多个边缘并且同 时具有不确定的边缘 ,此时边缘跟踪的效 果最好。典型的跟踪 对象是发射中的火箭 ,它有很好的前边缘 ,但是尾部边缘却由 于喷气而不确定。
场景。
18
04 总结与展望
总结与展望
视频运动目标的检测和跟踪主要用于获取运动目标的位置、姿态、轨迹等基本运动信息, 是理解服务对象或对目标实施控制的前提和基础。在场景较固定、环境较简单时, 通常采 用基于背景建模的方法, 就能够很好地进行运动目标的检测与跟踪任务。在动态背景下, 环境较复杂时, 一般需要对运动目标进行表观建模, 实现其检测与跟踪任务。
初始化提取 运动目标特
征
特征搜索阶 段
决策阶段
粒子重采样
15
视频目标跟踪方法-基于轮廓的目标跟踪
视频检测和运动目标跟踪方法总结

视频检测和运动目标跟踪方法总结目前常用的视频检测方法可分为如下几类:光流法,时域差分法,背景消减法,边缘检测法,运动矢量检测法[2]。
一、光流法光流法[1]是一种以灰度梯度基本不变或亮度恒定的约束假设为基础对运动目标进行检测的有效方法。
光流是指图像中灰度模式运动的速度,它是景物中可见的三维速度矢量在成像平面上的投影,表示了景物表面点在图像中位置的瞬时变化,一般情况下,可以认为光流和运动场没有太大区别,因此就可以根据图像运动来估计相对运动。
优点:光流不仅携带了运动目标的运动信息,而且还携带了有关景物三维结构的丰富信息,它能够检测独立运动的对象,不需要预先知道场景的任何信息,并且能够适用于静止背景和运动背景两种环境。
缺点:当目标与背景图像的对比度太小,或图像存在噪音时,单纯地从图像灰度强度出发来探测目标的光流场方法将会导致很高的虚警率。
且计算复杂耗时,需要特殊的硬件支持。
二、时域差分法时域差分法分为帧差法和改进的三帧双差分法。
1.帧差法帧差法[8]是在图像序列中的相邻帧采用基于像素点的时间差分, 然后阈值化来提取出运动区域。
视频流的场景具有连续性,在环境亮度变化不大的情况下,图像中若没有物体运动,帧差值会很小;反之若有物体运动则会引起显著的差值。
优点:时域相邻帧差法算法简单,易于实现,对背景或者光线的缓慢变化不太敏感,具有较强的适应性,能够快速有效地从背景中检测出运动目标。
缺点:它不能完全提取运动目标所有相关像素点,在运动实体内部不容易产生空洞现象。
而且在运动方向上被拉伸,包含了当前帧中由于运动引起的背景显露部分,这样提取的目标信息并不准确。
2.三帧双差分法三帧双差分法与相邻帧差法基本思想类似,但检测运动目标的判决条件上有所不同。
三帧双差分较两帧差分提取的运动目标位置更为准确。
三、背景消减法背景消减法[4]是将当前帧与背景帧相减,用阈值T判断得到当前时刻图像中偏离背景模型值较大的点,若差值大于T则认为是前景点(目标);反之,认为是背景点,从而完整的分割出目标物体。
视频跟踪实验报告
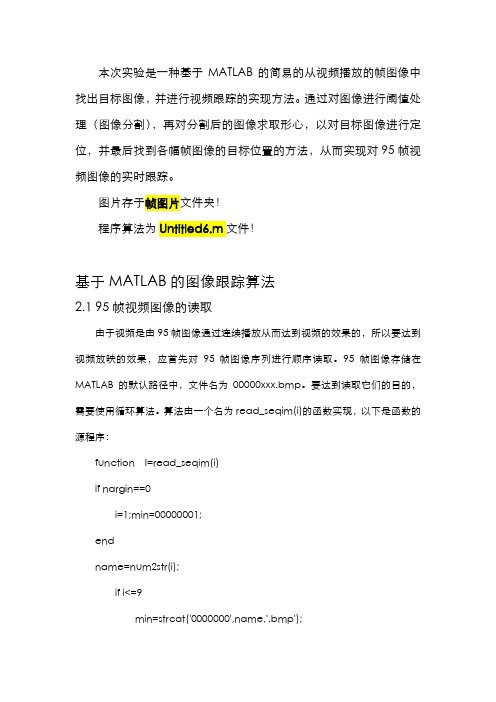
本次实验是一种基于MATLAB的简易的从视频播放的帧图像中找出目标图像,并进行视频跟踪的实现方法。
通过对图像进行阈值处理(图像分割),再对分割后的图像求取形心,以对目标图像进行定位,并最后找到各幅帧图像的目标位置的方法,从而实现对95帧视频图像的实时跟踪。
图片存于帧图片文件夹!程序算法为Untitled6.m文件!基于MATLAB的图像跟踪算法2.1 95帧视频图像的读取由于视频是由95帧图像通过连续播放从而达到视频的效果的,所以要达到视频放映的效果,应首先对95帧图像序列进行顺序读取。
95帧图像存储在MATLAB的默认路径中,文件名为00000xxx.bmp。
要达到读取它们的目的,需要使用循环算法。
算法由一个名为read_seqim(i)的函数实现,以下是函数的源程序:function I=read_seqim(i)if nargin==0i=1;min=00000001;endname=num2str(i);if i<=9min=strcat('0000000',name,'.bmp');elseif i<=99min=strcat('000000',name,'.bmp');elsemin=strcat('00000',name,'.bmp');endI=imread(min);其中i为读取图像的序号,通过以上的函数可以很方便的实现对95帧图像中任意一帧的读取,从而为后面的处理提供方便。
2.2 图像的阈值处理(图像分割)阈值(Threshold),也叫门限。
阈值化(Thresholding),即按给定阈值进行图像的二值化处理。
阈值分割法可分为以下几种:☐简单阈值分割法;☐多阈值分割法;☐最大类间方差法;☐最佳阈值法。
许多情况,图像是由具有不同灰度级的几类区域组成。
如文字与纸张、地物与云层(航空照片)等,阈值分割是利用同一区域的具有某种共同灰度特性进行分割。
视频目标跟踪和分割汇报总结

SiamMask的refinemodule网络
SharpMask网络结构: 可以看到自下而上的过程是传统的前向CNN网络输出 一个粗略的mask,然后需要逐层融合low-level的特征 来找到精确的物体边缘等信息。 refinement模块的作用是逆转pooling的作用,输入上 层传下来的mask encoding和自下而上传递过来的匹配 的features map,并且融合两个过程的信息来生成一个 新的mask encoding,有着两倍的空间分辨率。这个过 程一直持续到patch的全部分辨率被恢复,然后最后的 输出就是精细的object mask。
YOLACT 是实例分割中最快的算法(即FPS最大)。
网络结构
典型的基于anchor的目标检测器 有预测c个类别的置信分数和预测 bb的4个坐标两个分支,而这里的 需要增加k个mask系数,每个系数 对应每个模版,要预测4+c+k个数。
为了产生实例的 mask将两个分支 使用线性组合的 方法进行融合,之 后对组合结果使用 sigmoid非线性化 获得最终的mask。
high-to-low process的目标是生成低分辨 率和高分辨率的表征,low-to-high process 的目标是生成高分辨率的表征。
网络结构
(1)并行连接高分辨率到低分辨率的 子网,而不是像大多数现有解决方 案那样串行连接。因此,能够保持 高分辨率,而不是通过一个低到高 的过程恢复分辨率,预测的热图可 能在空间上更精确。
并与预测的b-box进行裁剪。 1)网络学会自行定Y位O实LA例CmT:asYk,ou视On觉ly、L空oo间k A和t 语Co义eff上ic相ien似Ts的实例将在模版中呈现不同; 模版mask的数量不依赖于类别数量,YOLACT学习的是一种分布式表示,每个实例有多个模版原型组合分割, 且在不同类别之间共享; 2)分布式表示导致M模S R版-C出N现N应一该些是情实况例:分一割些m模A版P在最空高间的上算划法分;开了图像,一些定位实例,一些检测实例的轮廓, 一些编码对位置敏感的方向图谱,可能同时也会划分图像。
剪辑工作任务完成情况总结

剪辑工作任务完成情况总结全文共四篇示例,供读者参考第一篇示例:剪辑工作在影视制作中是一个至关重要的环节,它直接影响到整部作品的质量和观赏性。
剪辑工作任务完成情况总结是一个对整个剪辑工作进行梳理、评估和总结的过程,通过对剪辑工作的完成情况进行分析,可以帮助剪辑师和制片方及时发现问题,进一步提升作品的质量。
以下是对一份剪辑工作任务完成情况总结的详细解读。
剪辑工作任务完成情况总结需要包括以下几个方面的内容:剪辑进度、剪辑质量、剪辑效果等。
在剪辑进度方面,总结应包括剪辑的起止时间、完成进度、是否按照计划进行等。
在剪辑质量方面,总结可以从镜头的选取、片段的流畅度、音乐的配合等方面进行评价。
在剪辑效果方面,总结可根据观众反馈、专业人士评价等进行评估。
对于剪辑工作任务完成情况总结的目的在于:对剪辑工作进行客观评价、了解问题所在、及时发现并解决问题、提高整体作品的质量。
通过总结,可以找出剪辑工作中存在的问题,进一步提升剪辑师的专业水平和作品的影响力。
剪辑工作任务完成情况总结的过程主要包括以下几个步骤:梳理剪辑过程、分析问题所在、制定改进措施、总结经验教训。
在梳理剪辑过程时,需要将整个剪辑工作的过程进行详细记录,包括剪辑师的工作内容、使用软件等。
在分析问题所在时,可以结合观众反馈、专业人士建议等进行分析,找出剪辑工作中存在的问题。
在制定改进措施时,可以提出具体的改进意见,比如加强对镜头选取的把控、提高片段的连贯性等。
在总结经验教训时,要对整个剪辑工作过程进行反思,总结出做得好的地方和需要改进的地方,为下一次剪辑工作提供参考。
第二篇示例:剪辑工作任务完成情况总结近期我们团队接到了一系列剪辑工作任务,经过大家的共同努力和协作,现在我将对这些任务的完成情况进行总结和分析,以便更好地了解我们的工作进展和提高未来工作的效率和质量。
我们收到了一位客户委托的视频广告剪辑任务。
这是一个对我们团队来说具有挑战性的任务,因为客户要求在很短的时间内完成并且需要高质量的成品。
项目进度跟踪总结汇报
项目进度跟踪总结汇报
尊敬的领导和各位同事:
我很高兴地向大家汇报我们项目的进度跟踪情况。
自从项目启
动以来,我们团队一直在努力工作,确保项目按时完成并达到预期
目标。
以下是我们的进展情况:
1. 项目目标和计划,我们已经确定了项目的目标和计划,并与
团队成员共享了这些信息。
每个人都清楚地知道自己的任务和责任,并且已经开始了相应的工作。
2. 进度跟踪工具,我们使用了一些先进的进度跟踪工具来监控
项目的进展情况。
这些工具帮助我们及时发现问题并及时采取措施
解决。
3. 里程碑和关键节点,我们已经成功地实现了一些重要的里程
碑和关键节点,这为项目的后续进展奠定了坚实的基础。
4. 风险管理,我们也在密切关注项目的风险,并采取了一些措
施来降低风险的影响。
我们相信这些措施将帮助我们顺利地完成项
目。
5. 团队合作,团队成员之间的合作非常融洽,大家都积极参与并为项目的成功贡献自己的力量。
我们相信这种团队精神将帮助我们克服任何困难。
总的来说,我们的项目进度跟踪工作取得了良好的成绩。
我们将继续努力,确保项目按时完成并达到预期目标。
谢谢大家的支持和配合。
谨此致意。
此致。
敬礼。
[你的名字]。
(完整版)视频目标检测与跟踪算法综述

视频目标检测与跟踪算法综述1、引言运动目标的检测与跟踪是机器视觉领域的核心课题之一,目前被广泛应用在 视频编码、智能交通、监控、图像检测等众多领域中。
本文针对视频监控图像的运动目标检测与跟踪方法,分析了近些年来国内外的研究工作及最新进展。
2、视频监控图像的运动目标检测方法运动目标检测的目的是把运动目标从背景图像中分割出来。
运动目标的有效分割对于目标分类、跟踪和行为理解等后期处理非常重要。
目前运动目标检测算法的难点主要体现在背景的复杂性和目标的复杂性两方面。
背景的复杂性主要体现在背景中一些噪声对目标的干扰,目标的复杂性主要体现在目标的运动性、突变性以及所提取目标的非单一性等等。
所有这些特点使得运动目标的检测成为一项相当困难的事情。
目前常用的运动目标检测算法主要有光流法、帧差法、背景相减法,其中背景减除法是目前最常用的方法。
2.1 帧差法帧差法主要是利用视频序列中连续两帧间的变化来检测静态场景下的运动目标,假设(,)k f x y 和(1)(,)k f x y +分别为图像序列中的第k 帧和第k+1帧中象素点(x ,y)的象素值,则这两帧图像的差值图像就如公式2-1 所示:1(1)(,)(,)k k k Diff f x y f x y ++=- (2-1)2-1式中差值不为0的图像区域代表了由运动目标的运动所经过的区域(背景象素值不变),又因为相邻视频帧间时间间隔很小,目标位置变化也很小,所以运动目标的运动所经过的区域也就代表了当前帧中运动目标所在的区域。
利用此原理便可以提取出目标。
下图给出了帧差法的基本流程:1、首先利用2-1 式得到第k 帧和第k+1帧的差值图像1k Diff +;2、对所得到的差值图像1k Diff +二值化(如式子2-2 示)得到Qk+1;3、为消除微小噪声的干扰,使得到的运动目标更准确,对1k Q +进行必要的滤波和去噪处理,后处理结果为1k M +。
111255,,(,)0,,(,)k k k if Diff x y T Q if Diff x y T+++>⎧=⎨≤⎩ (T 为阈值) (2-2)帧差流程图从结果看在简单背景下帧差法基本可检测到运动目标所在的位置,而且计算简单,复杂度低。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
CONTENT
YOLACT: 实时分割实例
《YOLACT: Real-time Instance Segmentation》
作 者:加利福尼亚大学 论文接收:2019年04月05日出的paper 代码地址:https:///dbolya/yolact 论文地址:https:///abs/1904.02689
论文介绍
在视频应用上进行物体追踪是一个 很基础的任务,他需要在不同帧之间建 立物体的联系,其目的是给定第一帧画 面中某物体的位置找到接下来所有帧上 的位置预测。使用标注成本很低的边框 坐标来表现目标物体。
论文介绍
矛盾:单独的使用边框跟踪对象可以达到预期的速度, 但是表达的信息远不如像素级的多,与单纯的生成边框 相比生成像素级的预测需要更多的算力资源,最快也做 不到实时。 方法:使用SiamMask来缩小目标跟踪和VOS的差距。 受Siamese启发,保留线下的可训练性,以及线上的速 度,同时改善他们对目 标物体的表现力。
(2)大多数现有的融合方案都将低层 和高层的表征集合起来。相反,本 文使用重复的多尺度融合,利用相 同深度和相似级别的低分辨率表征 来提高高分辨率表征,反之亦然, 从而使得高分辨率表征对于姿态的 估计也很充分。
一种快速在线跟踪和分割的联合方法 实时实例分割 人体姿态估计高分辨率表示学习 多目标跟踪和分割
论文概述
YOLACT将实例分“割B分ox成e两s 个ar并e 行stu任p务id:anyway though,I'm probably a true believer in ((之12后)),针对可对每以整 个从幅实m上图例a述s像预k两生测s步e成一中x模系c产e版列p生的mt整Iams幅cakas图nk'系像t g数的e实t Y例O分L割O:t对o 每le个ar实n 例t—h,eJm将o”s模e版phmRasekd和m预o测n,的Y相O应LO系v数3进行线性组合
视频目标跟踪和分割
汇报人署名 汇报日期
一种快速在线跟踪和分割的联合方法 实时实例分割 人体姿态估计高分辨率表示学习 多目标跟踪和分割
目录
CONTENT
一种快速在线跟踪和分割的联合方法
《Fast Online Object Tracking and Segmentation: A Unifying Approach》 作 者:Qiang Wang 论文接收:CVPR2019 代码地址:https:///foolwood/SiamMask SiamMask的测试代码:foolwood/SiamMask
一种快速在线跟踪和分割的联合方法 实时实例分割 人体姿态估计高分辨率表示学习 多目标跟踪和分割
目录
CONTENT
用于人体姿态估计的高分辨率表示学习
《Deep High-Resolution Representation Learning for Human Pose Estimation》
作 者:中科大&微软亚洲研究院 论文接收:CVPR2019 代码地址:https:///leoxiaobin/deep-high-resolution-net.pytorch 论文地址:https:///abs/1902.09212
并与预测的b-box进行裁剪。 1)网络学会自行定Y位O实LA例CmT:asYk,ou视On觉ly、L空oo间k A和t 语Co义eff上ic相ien似Ts的实例将在模版中呈现不同; 模版mask的数量不依赖于类别数量,YOLACT学习的是一种分布式表示,每个实例有多个模版原型组合分割, 且在不同类别之间共享; 2)分布式表示导致M模S R版-C出N现N应一该些是情实况例:分一割些m模A版P在最空高间的上算划法分;开了图像,一些定位实例,一些检测实例的轮廓, 一些编码对位置敏感的方向图谱,可能同时也会划分图像。
high-to-low process的目标是生成低分辨 率和高分辨率的表征,low-to-high process 的目标是生成高分辨率的表征。
网络结构
(1)并行连接高分辨率到低分辨率的 子网,而不是像大多数现有解决方 案那样串行连接。因此,能够保持 高分辨率,而不是通过一个低到高 的过程恢复分辨率,预测的热图可 能在空间上更精确。
Siamese和SiamMask网络
全连接层
Maxpooling conv+ReLu
孪生网络(伪孪生网络)
Hale Waihona Puke 应用SPP策略的孪生网络Siamese和SiamMask网络
这里利用一个vector来编码一个ROW 的mask,使得每个prediction位置具 对多的批每少通新有通来M一个道的a非过升个通f通esak常d维通道道精teu高来道就fpre度etah的实进有是mtwu输现行多iar不sepe出高各少s高m的之维效自个a的卷p后度运的过s积,进(行卷滤后这行,6积器级3时标但操。*联6再准直作得31)对的,接x,到我1这预有新卷们测积 1×1跨通道卷积操作。这种操作被称为 “DepthWise convolution”,极大的减 少了参数量。
论文概述
本篇论文主要研究的是人的姿态问题,着重输出可靠 的高分辨表征。 传统方法:大多数从高分辨率到低分辨率产生的低分 辨表征中恢复高分辨率表征。 本文方法:网络能在整个过程中都保持高分辨率的表 征。此人体姿态估计模型刷新了三项COCO纪录。
网络结构
(a)沙漏网络(b)级联金字塔网络 (c)简单基线网络(d)膨胀卷积结合网络
SiamMask的refinemodule网络
SharpMask网络结构: 可以看到自下而上的过程是传统的前向CNN网络输出 一个粗略的mask,然后需要逐层融合low-level的特征 来找到精确的物体边缘等信息。 refinement模块的作用是逆转pooling的作用,输入上 层传下来的mask encoding和自下而上传递过来的匹配 的features map,并且融合两个过程的信息来生成一个 新的mask encoding,有着两倍的空间分辨率。这个过 程一直持续到patch的全部分辨率被恢复,然后最后的 输出就是精细的object mask。