全国电子设计大赛旋转倒立摆
基于变量融合的环形二级倒立摆模糊控制研究

倒立 摆 系统 是 日常生 活 中所 见 到 的任 何 重 心 在 上 , 支 点 在下 的控制 问题 的抽 象 。它是 一个 高 阶次 、 多变 量 、 非线性、 不稳 定 、 强耦 合 的 自然 不 稳 定 系统 , 杆 级 数 越 摆 多 , 难使 之稳 定 。作 为一个 装 置 , 的结构 又相 当简 单 越 它 而且 成本 低 廉 , 稳定 效 果一 目了然 。所 以 , 常适 合 用来 非
例 因子值可在仿真过程中得到。 3 仿真 与分 析
根 据表 1 中的数据 及最 优控 制原理 可取 系统 的加权
系数 Q
Q=d ( , , , , ,) 12 34 5 6
. 。丁丁 T丁 0 T T —1 —T o TT — 鲁 箬 0 王 。 _生 -£ _ f o0『 1 『 i 『 》 T_ T_ T , — — — 鲁
2 模糊 控 制器 设计 由系统 的状 态 变量 定 义 可 知 , 形 二 级倒 立 摆 含 有 环
N N , S , O, E, O, T P , L P P 。 M, L N , N Z P P , S P , M, B] 本文 采用全 交迭 三角 形 分 布隶 属 函数 , 设 各 变量 论 域 且
图 2 二 级 倒 立 摆 模 糊 控 制 原 理 图
2 1 融合 函数 . 融合 函数 的设 计 包括 以下 三项 内容 : () 用最 优控 制 理论 中 的 Rca 1利 i 6方程 :A+A — c P
P R一 B p+Q=0 B T 得 到 :r k =R一
由上述定义的模糊子集及论域结合专家经验可设计 M m ai a dn 型模糊 推理 规则共 4 条 , 表 2所示 , 文采 用 9 如 本
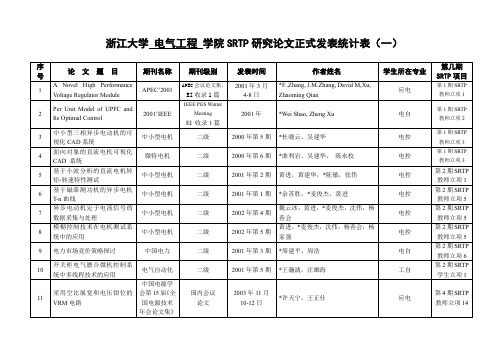
浙江大学电气工程学院SRTP研究论文正式发表统计表(一)
学报
二级
2004年第6期
*王文炆,严钢锋
工自
第4期SRTP教师立项17
26
基于单片机的直流电动跑步机控制器设计
工业控制计算机
二级
2004年5月
黄永泉,*林群,朱善安,
工自
第2期SRTP学生立项7
27
应用于数据采集次同中的485总线与CAN总线比较
工业控制计算机
二级
2004年5月
*陈夏清,吴燮华
应电
第4期SRTP学生立项24
14
桐柏抽水蓄能电站变频器启动装置(SFC)的谐波分析
中国电源学会第15届《全国电源技术年会论文集》
国内会议
论文
2003年11月10-12日
宿清华,吴国忠,*杨成林,杨建军,徐德鸿
应电
第2期SRTP教师立项10
15
具移相变频功能的正弦波功率信号源
中国电源学会第15届《全国电源技术年会论文集》
电信
第5期SRTP学生立项25
序
号
论文题目
期刊名称
期刊级别
发表时间
作者姓名
学生所在专业
第几期SRTP项目
53
HIERARCHICAL GENETIC ALGORITHM BASED SYSTEM LEVEL SYNTHESIS OM DPRA
AIA’2004
国际会议论文
2004.2
Min Li, Xiaobo Wu, *Xiaohong Zhu,
电气
第6期SRTP学生立项13
49
A Novel Bias Circuit Design
in Low Power LCD Driver
2004’ICSICT
GA优化的PID控制器在倒立摆系统中的应用
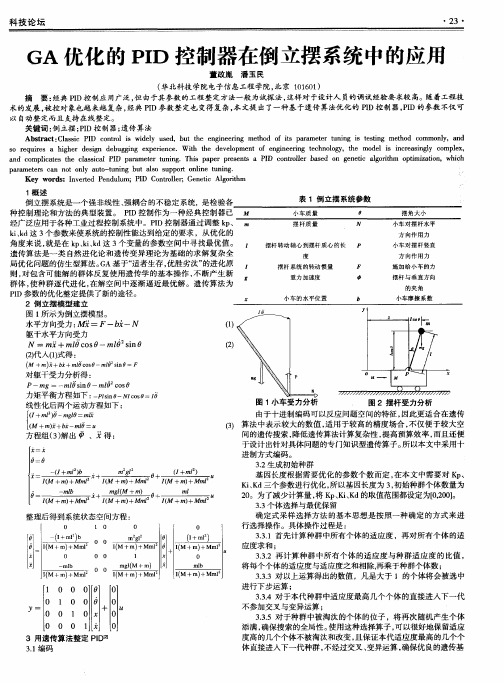
( 华北科技 学院 电子信息工程 学院, 北京 1 10 ) 0 6 1 要: 经典 PD控制应用广泛, 由于其参数 的工程整定方法一般 为试探 法, I 但 这样 对于设计人 员的调试经验要 求较 高。随着工程技
关键词 : 倒立摆 ;I PD控制 器; 遗传算 法
Ab t a t C a sc I o t l s wi ey u e ,b t h e gn e n t o f i p r me e u i g s t sig meh d c mmo l ,a d sr c : l s i P D c nr i o d l s d u t e n i e r g meh d o t a a t r t n n i e t t o o i s n ny n S e u rs a h g e d sg e u gn x e e c .W i h e eo me t f e gn e n tc n lg ,t e mo e i n r a i gy c mp e , O r q ie ih r e in d b g ig e p r n e i t t e d v lp n o n i e r g e h oo y h d l s c e s l o lx h i i n a d c mp iae h ls ia I p r me e u i g nl a e r s n s a P D o t l r b s d o e e i lo i m p i z t n n o l ts t e ca s l P D a a t r t n n .r i p p r p e e t I c n r l a e n g n t ag r h o t c c s oe c t miai ,w ih o hc p r me e s c n n t o l u o t nn u lo u p  ̄ o l e t n n . a a t r a o ny a t— u i g b t a s s p o n i u i g n Ke r s n e d P n u u y wo d :I v  ̄e e d l m;P D o tol r I C n r l ;Ge e i g r h e n t Alo t m c i
查看- 华中科技大学精品课程.
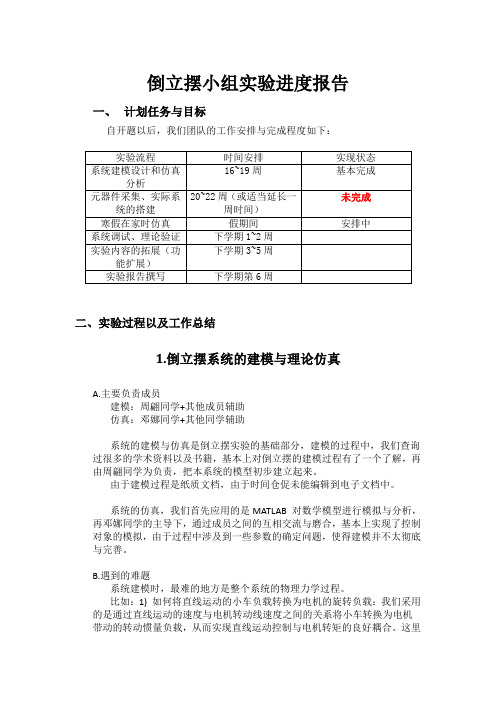
倒立摆小组实验进度报告一、计划任务与目标自开题以后,我们团队的工作安排与完成程度如下:二、实验过程以及工作总结1.倒立摆系统的建模与理论仿真A.主要负责成员建模:周翩同学+其他成员辅助仿真:邓娜同学+其他同学辅助系统的建模与仿真是倒立摆实验的基础部分,建模的过程中,我们查询过很多的学术资料以及书籍,基本上对倒立摆的建模过程有了一个了解,再由周翩同学为负责,把本系统的模型初步建立起来。
由于建模过程是纸质文档,由于时间仓促未能编辑到电子文档中。
系统的仿真,我们首先应用的是MATLAB 对数学模型进行模拟与分析,再邓娜同学的主导下,通过成员之间的互相交流与磨合,基本上实现了控制对象的模拟,由于过程中涉及到一些参数的确定问题,使得建模并不太彻底与完善。
B.遇到的难题系统建模时,最难的地方是整个系统的物理力学过程。
比如:1) 如何将直线运动的小车负载转换为电机的旋转负载:我们采用的是通过直线运动的速度与电机转动线速度之间的关系将小车转换为电机带动的转动惯量负载,从而实现直线运动控制与电机转矩的良好耦合。
这里我们得到的结论如下:J=*m其中J为等效的转动惯量,m为直线运动负载,r为电机轮轴的半径2) 如何实现小车与摆杆的受力分析:由于本系统比较负载,小车与摆杆之间又是自由连接,使得系统的物理分析显得十分繁琐和困难,因此我们参考了合肥工业大学控制工程系的硕士论文《倒立摆系统的稳定控制研究》。
得到了倒立摆的数学物理模型以下是经过仿真得到的系统传函(初步结果,未经过讨论)-14.8137 s (s-5.147) (s+5.147) (s+0.01)---------------------------------------------------------------------------------------------------------------- s (s-5.309) (s+2.696) (s+5.315) (s+25.01) (s-25) (s+0.09091) (s^2 - 2.552s + 6.883)3) 电机参数的确定:在建模与仿真的过程当中遇到的最大的难题,就是电机的参数选择,由于对电机转矩没有具体的概念,在这个方面我们有些没有头绪,但我们也采取了一些措施从各个方面了解信息。
大连交通大学2013年校级及以上大学生科技创新竞赛获奖情况汇总表
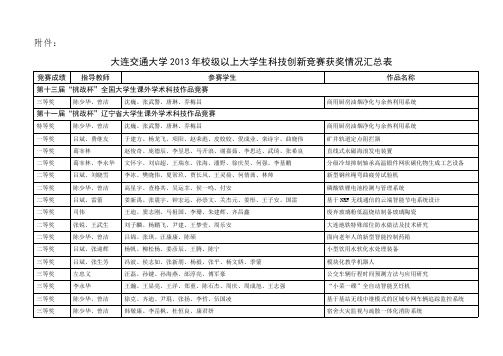
附件:大连交通大学2013年校级以上大学生科技创新竞赛获奖情况汇总表竞赛成绩指导教师参赛学生作品名称第十三届“挑战杯”全国大学生课外学术科技作品竞赛三等奖陈少华、曾洁沈巍、张武警、唐琳、乔梅昌商用厨房油烟净化与余热利用系统第十一届“挑战杯”辽宁省大学生课外学术科技作品竞赛特等奖陈少华、曾洁沈巍、张武警、唐琳、乔梅昌商用厨房油烟净化与余热利用系统一等奖吕斌、费继友于建方、杨龙飞、项阳、赵荣彪、皮姣姣、倪成业、栾诗宇、曲晓伟矿井轨道定点阻拦器一等奖葛宰林赵俊奇、庞德辰、李昱思、马开浪、谢嘉茹、李思达、武琦、张希良直线式永磁海浪发电装置二等奖葛宰林、李永华文怀宇、刘启超、王瑞东、张海、潘野、徐庆昊、何强、李基鹏分级冷却抑制轴承高温锻件网状碳化物生成工艺设备二等奖吕斌、刘晓雪李冰、樊晓伟、夏常玖、贾长风、王灵荷、何倩茜、林帅新型钢丝绳弯曲疲劳试验机二等奖陈少华、曾洁高星宇、查格其、吴运幸、侯一鸣、付安磷酸铁锂电池检测与管理系统二等奖吕斌、雷蕾姜新禹、张震宇、钟宏远、孙崇文、关杰元、姜彤、王子安、国雷基于NRF无线通信的云端智能节电系统设计二等奖司伟王迪、窦志刚、马祖国、李珊、朱建辉、齐昌鑫废弃玻璃粉低温烧结制备玻璃陶瓷二等奖张锐、王武生刘子麟、杨鹏飞、尹建、王梦莹、周乐安大连地铁特殊部位防水做法及技术研究二等奖陈少华、曾洁吕锦、张琪、汪康康、陈硕面向老年人的新型智能控制药箱二等奖吕斌、张迎辉杨帆、柳松杨、姜彦辰、王腾、陈宁小型饮用水软化水处理装备三等奖吕斌、张生芳冯波、侯志如、张新朋、杨毅、张平、杨文娇、季蒙模块化教学机器人三等奖左忠义汪磊、孙键、孙海燕、邰淳亮、傅军豪公交车辆行程时间预测方法与应用研究三等奖李永华王瀚、王显亮、王洋、郑重、陈石杰、周庆、周成旭、王志强“小菜一碟”全自动智能烹饪机三等奖陈少华、曾洁徐克、齐迪、尹琨、张扬、李哲、伍国凌基于基站无线中继模式的区域专网车辆追踪监控系统三等奖陈少华、曾洁韩敬康、李岳枫、杜恒良、康君妍宿舍火灾监视与疏散一体化消防系统第九届全国周培源大学生力学竞赛(辽宁赛区)二等奖张雪珊王卿三等奖张雪珊王录录第五届全国大学生数学竞赛预赛(辽宁赛区)一等奖戴晓鸣、王丽媛何克胜、庞艳涛二等奖皇甫明、李宁、林美艳、孙日明、张玉丽、顾颖、梁波朱治文、刘江伟、贺彬、王豪豪、党海舟、张健、梁腾飞三等奖徐志敏、孙晓英、李秀梅、王丽敏、张月、王岩、徐天博、汪颖、汪军、高静华、张书莲刁锋、姚丹阳、刘丰、周益、潘梦然、汪财雄、陈桐、孟飞、胡江祺、梁赛、金仕亚第五届辽宁省大学生数学竞赛一等奖戴晓鸣、王丽媛、皇甫明、李宁、林美艳、孙日明、张玉丽、顾颖、梁波、徐志敏、孙晓英、李秀梅、王丽敏、张月、王岩、徐天博、汪颖、汪军、高静华、张书莲何克胜、庞艳涛、朱治文、刘江伟、贺彬、王豪豪、党海舟、张健、梁腾飞、刁锋、姚丹阳、刘丰、周益、潘梦然、汪财雄、陈桐、孟飞、胡江祺、梁赛、金仕亚二等奖于慧徐峰三等奖王海燕、李佳宁、张振宇臧振君、马杰、夏飞大连市第二十二届大学生数学竞赛一等奖戴晓鸣、高静华、顾颖、皇甫明、金丽、李佳宁、李宁、李秀梅、梁波、林美艳、刘勇、孙日明、孙晓英、汪军、汪颖、王海燕、王丽敏、王丽媛、王岩、徐天博、徐志敏、于慧、张书莲、张玉丽、张月、张振宇、周大勇庞艳涛、姚丹阳、梁腾飞、董杰、朱治文、金仕亚、刘丰、胡江祺、汪财雄、王坚、贺彬、繤丹东、张向东、马杰、徐峰、将万博、靳叔凯、梁赛、张健、刁锋、管振强、孟飞、党海舟、周益、王树春、杨燚、孟迪二等奖白凤兰、毕卫星、蔡敏、戴晓鸣、丁立佳、高静华、顾颖、郭大为、皇甫明、金丽、李佳宁李宁、李秀梅、李焱淼、李雁南、梁波、林美艳、刘勇、宋爱民、孙日明、孙晓英、万维明、汪军、汪颖、王国灿、王海燕、王丽敏、王丽媛、王晓元、王岩、徐天博、徐志敏、于慧、张继红、张书莲、张玉丽、张月、张振宇司安然、田成志、李文海、李朋、王德名、李强、孙伟莎、马睿泽、卢军、李修雷、兰锋、邓义仁、隆宏斌、李亮、王鑫、张如一、王佳辉、胡珂、陈桐、孙江南、周威、殷佳鹏、尹太国、毛竞争、王玉龙、李芝华、李文浩、吴启龙、胡浩、张翔博、陈志伟、吕小明、刘宁春、孟陈祥、叶安东、张聪、蒋凯雄、侯振兴、孙渤、胡江奎、何江涛、汤泽惠、孙学涛、顾自豪、周密、冯文敏、蒋敏、邵乾宇、张啸男、夏中羽、李嘉曦、汪朝辉、柳驰航、臧晓雅、霍梦梦、孙向阳、赵政、郝靖伟、刘雨涵、王文龙、孙艳阳、张雅霖、宁旭阳、刘晓林。
2014年西安交通大学本科生科研训练和实践创新-西安交通大学教务处

项目名称
点阵式骨科病人褥疮防治病床 肘部康复装置的机械结构创新设 计与制作 地震搜救机器人的设计制作 传动演示机器人 抛光机夹持装置 旋转智能桌椅 “Xjtuer-西交人” 开放式网络平 台的创立 基于超快编码光投影的便携式 3D 照相机开发与研究 机械原理展示台车转向系统的结构简化设计 立体影像展示机 一种挠度与转角测量装置的开发 节能车二级传动节能设计 基于微纳技术的非标记癌细胞散 射测量研究与光纤检测系统机构 基于能量自给型无线传感器网络 的振动信号采集方法研究 面向 ABU ROBOCON 2014 大赛的机 器人的设计与制作 大学生综合性多功能床的设计与 创新 新型多自由度模型投影黑板 手持式无标志点拼接 3D 扫描仪 的开发 面向 ABU ROBOCON 2014 大赛的爬 梯机器人的设计与制作 节能车车架焊接夹持装置的研究 多功能可调节桌椅
户外课堂 基于纳米材料的室内空气智能治 理仪 冰面垃圾清理小车的设计与制造 微冲击强化实验平台开发 节能车电控式离合器设计 气动肌肉驱动的肘部康复装置的 控制系统设计 双足机器人 Nao Robot 的行走研 究 磁悬浮定位控制系统 非标记早期癌细胞光学检测系统 集成电路设计 气动执行机构的位置检测与伺服 控制 自动贴合楼梯表面式履带型自动 上楼机 齿轮疲劳寿命预测 基于单片机无线通信的智能家居 中的全自动饮料机系统 机械式多功能粉笔绘图仪 机械制图专用削笔刀 凸轮运动规律的演示仪 多功能课桌 iStudy Space 设计与制作 教具收纳机 新型齿轮范成仪研发 水杯稳定装置 仿生机构的仿真研究与制作 车床主轴状态监测故障诊断 Fe3O4 磁性纳米粒子表面可视化 示踪修饰研究 陶瓷结合剂 cBN 陶瓷磨具的制备 及其磨削性能研究 单晶硼的纳米线制备及其表征 Li2S/C 复合材料做 Li-S 电池正 极研究 丙烯酸酯类无规共聚物的分子设
毕业设计二级倒立摆建模之欧阳与创编
四川理工学院毕业设计(论文)二级倒立摆系统建模与仿真学生:学号:专业:自动化班级:自动化指导教师:四川理工学院自动化与电子信息学院二O一一年六月欧阳与创编 2021.03.08摘要常规的PID控制从理论上可以控制二级倒立摆,但在实际中对PID控制器参数的整定为一难点。
本文针对二级倒立摆系统单输入三输出的不稳定系统,通过三回路PID控制方案,来完成对倒立摆的控制。
利用状态反馈极点配置的方法来对参数进行整定,解决PID参数整定的难点。
然后借助于MATLAB中的Simulink模块对所得的参数进行仿真,结果表明三回路PID控制是成功的,参数的有效性,也证实了这种参数整定方法简单实用。
并通过配置不同位置的极点,对其结果进行分析得到极点配置的最佳配置方案。
关键词:倒立摆;PID;状态反馈; MATLABABSTRACTDouble Inverted Pendulum System Modeling andSimulationConventional PID control theory to control the inverted pendulum, but in practice the parameters of PID controller tuning is a difficult. In this paper, double inverted pendulum system, the instability of single-input three-output system, through the three-loop PID control programto complete the inverted pendulum control.Pole placement using state feedback approach to setting the parameters to resolve the difficulties PID parameter tuning. With MATLAB and Simulink in the module parameters obtained from simulation results show that the three-loop PID control is successful, the effectiveness of the parameters, but also confirms this tuning method is simple and practical.Different locations through the pole configuration, the results were too extreme configuration of the best configuration.Key words:pendulum;PID control ;state feedback;MATLAB目录摘要IABSTRACTII第1章引言11.1 倒立摆研究的目的及意义11.2 倒立摆的发展史和研究现状21.3本文的主要工作4第2章倒立摆的建模52.1 二级倒立摆的简介及物理模型52.2 二级倒立摆计算机控制系统结构52.3 二级倒立摆的数学模型62.4根据牛顿力学、刚体动力学列写二级倒立摆的数学模型7 第3章控制策略的选择123.1 MATLAB简介123.2该系统的能控、能观及稳定性的分析153.2.1系统的能控性153.2.2系统能观性173.2.3系统的稳定性173.3 确定控制策略183.4 控制器参数整定方法183.5 通过状态反馈极点配置法来整定参数20第4章计算机仿真及结果分析234.1 Matlab下Simulink模块简介234.2 在Simulink下的仿真244.3对仿真结果的分析31第5章结束语33致谢34参考文献35第1章引言1.1 倒立摆研究的目的及意义在控制理论发展的过程中, 一种理论的正确性及在实际应用中的可行性,往往需要一个典型对象来验证, 并比较各种控制理论之间的优劣, 倒立摆系统就是这样的一个可以将理论应用于实际的理想实验平台。
模糊趋近率的滑模控制在倒立摆系统中的应用研究
控 制 理 论 与 应 用
Con rlT o yan pl a i s to he r d Ap i t c on
模糊 趋 近 率 的滑模 控 制在倒 立摆 系统
中的应 用研 究
谢慕君 . 王 辉
( 长春 工业大学 电气 与 电子工程学 院 , 吉林 长春 1 0 1 ) 3 0 2
杆 质 心 的 距 离 、摆 杆 2 转 动 中心 到杆 质心 的距 离 ; Oi 1’ 分别表 示连杆 与水 平轴 的夹角 、摆杆 1与垂 i:,3 ( 2)
直 向上方 向的 夹角 、摆 杆 2与垂 直 向上 方 向的夹角 。 采用 拉格 朗 日方法 推 导旋转 二 级倒立 摆 动力学 方 程【 ̄ 。拉格 朗 日方程为 : 3引
Lq毒 =Tq ) V q4 (,) (, 一 (,) ( 1 )
为 了克服 常规滑模 变结构控 制存 在 的抖 振 , 许多学
者提出模糊滑模控制【 引 。本文采用模糊指数趋 近律 来
综合滑模控制系统 , 以极点配置 为基础设计 了一种模糊 自适应调整趋近率 的滑模控制器 , 现了旋转二级 倒立 实
摘
要: 采 L g a g 函数建立了旋转二级倒立摆系统的状态空问方程 。为了解决常规滑模控制的抖振 问题 , 出 _一种 以极点配 a rn e 提 『 置为基础的模糊趋近律滑模控制策略。 将模糊逻辑控制 与趋近律相结合 , 推导 l模糊趋近律 。 叶 『 仿真结果表 叫, 该方法 不仅保留 了滑模控制系统具有 的较慢的鲁棒性 , 同时改善了控制 系统滑动模态的品质 , 消除了系统的抖振。
X EMujn WA GHu I - , N u i
( h o f lcrnca dE etia n ier gC a g h nUnv ri f eh oo y C a gh n1 0 1 hn ) S o l eto i n lcr l gn ei ,h n c u iest o c n lg , h c u 3 0 2C ia oE c E n y T n
水声目标识别技术的现状与发展
Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 97【关键词】水声目标识别 特点 目标识别算法1 国内外水声目标识别特点及现状分析随着科技的发展,水声目标身份识别在洋经济与军事活动中运用十分广泛。
水声目标识别技术通常是利用各类型传感器收集目标信息并对其特征进行分析,通过比对已有信息库识别目标的类型。
其工作原理主要是利用了声纳接收的被动目标辐射噪声、主动目标回波以及其他传感器信息提取目标特征并进行判断。
水声目标识别技术的现状与发展文/章业成水声目标主要包括声音、水流扰动和电磁辐射等特征信息。
不同水声目标的特征信息不同,例如舰艇和海底暗礁无论空间形态还是运动状态都有很大差异,通过差异化比对识别目标种类。
水声目标识别技术在军事上的运用主要是从20世纪60年代开始,其中以美、英、法等国为代表的军事强国,对水声目标识别技术进行了深入研究。
水声目标识别在国内起步较晚,但随着海洋经济以及军事领域的发展,水声目标识别在国内的发展开始得到重视。
多所高校及研究院均对水声目标物的甄别进行了大量探究,与此同时计算机技术、人工智能等新兴领域和前沿科技被吸收到水声目标的识别技术中,无论是识别灵敏性还是准确度都有了巨幅的提升。
2 水声目标识别的传统识别方法传统的水声目标识别方法通常包括通过以下几种方式进行:(1)通过噪声的不同特性进行识别。
螺旋桨和机械噪声通常可以作为水声目标辐射噪声能量的重要来源之一。
研究者根据对不同类舰船的辐射噪声特性差异进行分析,实现水声目标分类;(2)通过水声目标的航行速度、加速度等运动状态及急剧变化等行为,预测出目标的后续行为及目的。
此外,还可以通过对水声目标的行为、状态和类型进行分析,寻找出其内在关联,并通过模拟估计上述关联性特征预测目标的真实目的,从而实现目标分门别类;(3)根据不同目标船舰的排水量特征,通过分析不同型号的舰船在运行时,噪声强度与航速和排水量之间的关系,进行目标分类。
西电第25届星火杯作品集
西电科〔2013〕35号关于表彰奖励第二十五届“星火杯”大学生课外学术科技作品竞赛获奖集体和个人的决定各单位:2013年我校以立德树人为统领,以服务学校“育人”中心工作为宗旨,以学校全面拓展提升战略“四大计划”推动工作,深化大学生科技创新内涵,在学生中大力开展科技创新活动,树立科技创新典型,激发西电学生科技创新热情,积极引导学生开展研究式学习、拓宽学术视野,推动大学生科技作品成果转化,提升学生社会责任感、创新精神与工程实践能力。
学校自2013年6月启动了第二十五届“星火杯”大学生课外学术科技作品竞赛。
现活动已圆满闭幕,经竞赛评审委员会评审,决定授予:机电工程学院“星火杯”;电子工程学院、通信工程学院2个学院“优胜杯”;软件学院、物理与光电工程学院、微电子学院等3个学院“优秀组织单位奖”;王思浓等11名同学第十届“大学生科技英才”称号;《基于STM32的可遥控自平衡车》等13件作品特等奖;《基于有方M660模块及MSP430的污水远程实时监控及采样船》等35件作品一等奖;《GIS在新农村中的应用》等115件作品二等奖;《自制可调稳压电源》等232件作品三等奖。
学校决定对以上获奖集体和个人予以表彰奖励。
附件:第二十五届“星火杯”大学生课外学术科技作品竞赛获奖集体和个人名单西安电子科技大学2013年12月13日- 2 -附件第二十五届“星火杯”大学生课外学术科技作品竞赛获奖集体和个人名单一、荣获集体奖的单位机电工程学院“星火杯”;电子工程学院、通信工程学院2个学院“优胜杯”;软件学院、物理与光电工程学院、微电子学院等3个学院“优秀组织单位奖”;二、大学生科技英才(11人)通信工程学院:王思浓王游电子工程学院:李小双计算机学院:杨增印机电工程学院:陶冶博林培焕物理与光电工程学院:侯守荣经济与管理学院:胡璇数学与统计学院:温凯林软件学院:王超微电子学院:吕宝起三、获奖作品名单(394件)特等奖(13件)一等奖(35件)- 4 -- 6 -二等奖(115件)- 8 -- 10 -- 12 -三等奖(231件)- 14 -- 16 -- 18 -- 20 -- 22 -- 24 -- 26 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录 摘 要 本设计综合考虑基础部分和发挥部分要点,采用mega128a为主控芯片,BTS7960驱动电机并在程序中涉及到pid算法对电机进行调控,在设计中,我们采用1000线编码器为角度传感器。在该简单控制装置中,我们实现了摆动,圆周运动和短时间的自动控制下的倒立。 关键字:倒立摆,mega128a,编码器
第一章 系统方案比较与选择
1.1总实现方案 方案一: 用陀螺仪和加速度计通过卡尔曼数据融合得到角度,用此处的角度为载体用单片机进行数据处理,并调整电机。 方案二: 用电位器做角度传感,通过单片机自带ADC来读取电位数值以此为依据来判断角度,并调整电机。 方案三: 用编码器做角度传感器,通过读取编码器的输出脉冲来计算角度传感器的输出角度,用此角度做处理调整电机。 通过对两个方案的对比选择,方案一中的加速度计和陀螺仪算法实现复杂,我们在融入卡尔曼滤波后有明显滤波效果,但是由于圆周运动,会使得各个方向轴返回的数据出错,且波动大,会减弱卡尔曼的滤波效果,对于pid的精准调整还是远远达不到预期。在方案二中,考虑到电位器内部结构问题,虽然理论上电位器在转动过程中是线性的,但是考虑到每次停靠的电阻位可能会产生误差,最后考虑到我们最终选定的单片机ADC只有10位,在方案三中,由于实现编码器的功能实现方便简单,并能更多的趋近于精确值,因此最后我们采用了方案三。
1.2主控制器方案比较与选择 为了完成在短时间快速采集并计算角度,主控器件必须有较高的CPU工作频率和存储空间。 方案一:采用51系列加强型STC12C5A60S2作为主控器件,用来实现题目所要求的各种功能。此方案最大的特点是系统规模可以做得很小,成本较低。操作控制简单。但是,我们在利用单片机处理高速信号快速扫描及电机控制时显得吃力, 51系列单片机很难实现这一要求。 方案二:采用ATMEL公司的AVR系列ATMEGA128A单片机为核心控制器件,MEGA128A有8个外部中断,中断系统丰富,并且有128K 字节的系统内可编程Flash,我们对它的性能和指标相对也较为熟悉,如此能够实现快速扫描和数据处理! 按照题目的要求,综合考虑我们最终选择了方案二,采用ATMEGA128A单片机为核心控制器件。
第二章 理论分析与计算
2.1编码器脉冲转换角度设计 在单片机中,我们开启外部0中断,在AVR系列单片机中外部0中断的中断优先级最高,以此我们可以得到较为精确的角度。由于我们使用的编码器为1000线编码器,所以每一个脉冲的角度值为0.36,所以在计算时即使丢步也不会很大的影响角度值,我们在后面做过的实验测试中,也证明了我们的想法。
2.2摇摆及圆周算法设计 我们通过对整体的系统建模,在查阅资料当中,根据单摆定律,摆杆的摆动虽然在衰减但是摆动的周期相同,所以在基础要求中的摇摆和圆周运动中,只要在摆杆在正弦我们对单摆系统实测波形如下,所以依据我们分析,当每次施
力点在每次过峰值的时候既可以累加力的作用效果,以此来完成摇摆和圆周运动。 图2-2 2.3机械结构设计及电机选型 图2-3 以上是我们机械结构的仿真图。 在电机选型中,我们首先想到步进电机很便于角度控制,但是由于步进电机反应较慢,所以我们没有考虑,对于普通的直流电机虽然其反应快但调速性能差,另外我们还可以选择减速电机和直流伺服电机,直流伺服电机调速性,启动和制动都很有优势但是价格昂贵,最后在考虑到经济适用性方面,我们选择了带有减速箱的减速电机。 在这个简易摆装置中,我们选用400转减速电机,型号为JH37-555,额定功率为15W,力矩为30Kgf.cm,由于转矩T=9550 * P / n= 716.25N·m,电机中心距离转臂245mm,电机转矩已经足够大,完全可以带动所要带的物体。另外,由于该系统中电机要在短时间内顺逆时针转动,所以系统要达到很高要求的稳定性,所以我们在选择装置的底盘和支架选用了较为稳固的粗木。在转臂与摆杆连接处我们选用了欧姆龙1000线编码器,编码器的轴与轴承相连接,也解决了摆杆与转臂的连接问题。 在机械结构的设计当中我们一共修正了3次基本构架,也经历了很多次的调整,在这个过程中也确定了最终的最稳定的构架。
2.4 PID算法设计 为了实现主轴旋转角度控制,我们又采用电机转动范围限制,同样的采用增量式PID控制算法,且结合我们单片机的速度限制(8位,16Mhz),电机旋转角度测量会存一定的的偏差,因此我们整定了P、I两个参数,减小了因测量误差计算出来的PID偏差。 采集回来的摆轴角度和主轴旋转角度,经PID反馈回来的数据进行融合,以PWM占空比的形式直接输入到减速直流电机上面。从而达到目标控制。 PID参数整定:由于我们在物理结构,以及力学方面的知识薄弱,因此我们采用了反复整定确定系数的办法,首先,我们控制I、D为零,控制P参数,知道系统对输入阶跃响应出现零界振荡,记下这时的比例系数和零界震荡周期,在此基础上将该系数乘以60~70%,在调节I参数,同样的方法,调节D参数,知道系统稳定。 增量型控制: 控制流程: 公式: 程序框图:
第三章 系统电路设计
3.1 系统主板工作原理 系统主板主要由5V电源模块,3.3V电源模块,蜂鸣器模块,以及ATMEGA128A单片机为核心控制模块按。 5V电源模块:此设计采用12V开关电源供电,通过稳压芯片LM2576一脚输入三脚输出将12V输入转变为5V输出,来给单片机供电。 3.3V电源模块:3.3V电源输出是由AM1117稳压芯片三脚输入5V二脚输出来进行转换 按键模块:本系统板中设计了四个按键,通过按键来对不同功能来进行切换演示。(外接) 液晶模块:液晶模块采用NOKIA5110液晶来显示,NOKIA5110液晶具有功能强大,连接简单等优势。(外接) 图3-1 系统主板工作原理图
第四章 系统程序设计
4.1 系统总体模块图 4.2 系统总流程图
第五章 系统测试与结果
5.1 传感器角度测试 我们在进行测试时为了保证角度的正确性,我们每将摆杆转动一个圆周或者多个圆周最后在摆杆垂直的角度为对360度求余即为0度,所以我们对编码器测量角度进行了测量以便分析其误差。 测量次数 转动一个圆周 转动两个圆周 转动三个圆周 综合误差 1 0 2 -1 0.83% 2 1 0 2 0.83% 3 0 0 -1 0.27% 4 0 -2 0 0.56% 5 0 1 -3 1.11% 6 0 -1 2 0.83%
5.2 摇摆及圆周运动测试
我们在调试好后,对摆杆的摇摆进行测试,主要是针对摆杆起振到60度及以上角度的时间进行了统计分析。(该数据由秒表测量得到,角度由简易量角器测得) 测量次数 稳定时间 稳定角度 1 3.7s 大于60度,小于90度
2 4.2s 大于60度,小于90度
3 4.0s 大于90度
4 3.8s 大于60度,小于90度
5 4.0s 等于90度
6 3.7s 大于60度,小于90度
由以上数据可知,摇摆测试中该装置基本稳定。
我们同时也对摆杆进行了圆周运动的测试,主要是针对圆周运动的稳定性进行了测试统计分析。(该数据由秒表测量得到)
ATMEGA128A 单片机 驱
动 电机
编码器角度检测
按键 LCD 显示
电源电 路 测量次数 稳定时间 备注 1 5.3s 成功进入圆周状态
2 4.8s 成功进入圆周状态
3 5.5s 未成功进入圆周状态
4 5.0s 成功进入圆周状态
5 5.3s 成功进入圆周状态
6 5.2s 成功进入圆周状态
由以上数据可以,我们装置的圆周运动也是基本稳定的,但是在测试中出现了一次未成功进入
的圆周运动状态,我们分析是,由于在程序中我们要求每次起振要从0度开始,由于测量中的疏忽,我们没有等到摆杆静止就进入了测试,由此而产生的错误。
5.3 倒立摆测试 我们对倒立摆主要进行了摆杆稳定时间测试,以此分析我们的装置在倒立摆过程中的稳定性。第一项测试是在人为将摆杆树直在165度到-165度范围内,待摆杆直立后的稳定时间。 测量次数 稳定时间 备注 1 大于5s 稳定
2 大于5s 稳定
3 大于5s 稳定
4 大于5s 稳定
5 大于5s 稳定
6 大于5s 稳定
我们对倒立摆又进行碰撞测试(用15cm摆线绑定,将摆线拉至45度) 测量次数 碰撞砝码重量 稳定状态 备注 1 4.88g 稳定 2 4.88g 稳定 3 4.88g 稳定 4 7.22g 稳定 5 7.22g 稳定 6 7.22g 稳定 从以上数据可以看出,我们的倒立摆系统也是相对稳定的。
第六章 误差分析
6.1 整体的误差分析 由于我们在本次设计中采用编码器为1000线编码器,理论上每转一圈要进入外部中断1000次,所以在程序中很有可能出现掉步或者错步的。但是由于我们采用的编码器线数较高,所以即使丢步也能基本满足要求。为了减小误差,我们将编码器接到了最高优先级别的外部中断0中,所以也基本能满足要求。