雷达天线伺服控制系统
Saber Designer在雷达天线稳定平台伺服系统设计调试中的应用

控 制参 数 进 行 预 估 。SbrD s nr 件 的应 用 大 大 ae ei e 软 g 降低 了天线稳 定平 台系统调 试 风险 , 缩短 了调试 时 问 , 提 高 了调试效 率 。
SbrD s e 可 同时 对模 拟 信号 、 ae ei r n g 事件 驱 动模 拟
i a i l t n e t r s ls r c mp r d a d v rf d t s o fn lsmu a in a d t s e u t a e o a e n e i e o h w t a he s f r c n r a l o i h t t ot e a g e ty wa
信号 、 数字 信 号 以及 模数 混合 信 号设 备 进 行 仿 真。
S br 用领 域 广泛 , ae适 包括 电子 学 、 电力 电子 学 、 电机 工
程、 机械工程 、 电光学 、 光学 、 水利 、 制系统 以及数据 控
2 Sbr ei e 软件介 绍 ae D s nr g
1 引 言
雷 达天线 伺 服系统 是 雷达 的重 要 组成 部 分 ,它 对 于发现 目标 以及 精确地 测 量 目标 的位置 和其他 参数 都 起 着重 要作 用 。对 于大型 舰载 三坐 标雷 达天 线稳定 平 台, 由于 其本 身体 积 、 质量 较大 , 刚性 也不 太好 , 系统 在 实 际调 试 中风 险较 大 。本 文 利 用 混 合 仿 真 软件 Sbr ae D snr在 设计 和实 际调 试前对 伺 服系 统进 行参 数 仿 ei e, g
i r v h f ce c ft e d sg n e u g n f h y tm. mp o e te e i n y o e in a d d b g i g o e s se i h t
浅谈雷达伺服系统的设计
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
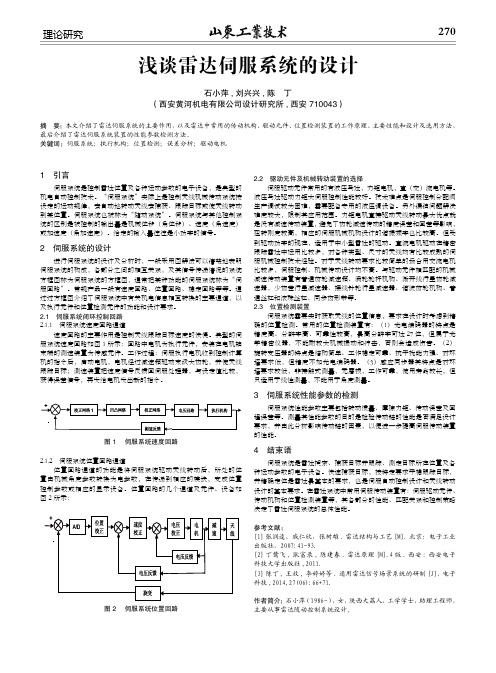
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
雷达天线伺服控制系统要点
概述用来精确地跟随或复现某个过程的反馈控制系统。
又称随动系统。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移(或转角)。
伺服系统的结构组成和其他形式的反馈控制系统没有原则上的区别。
它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
位置随动系统的输入和输出信号都是位置量,且指令位置是随机变化的,并要求输出位置能够朝着减小直至消除位置偏差的方向,及时准确地跟随指令位置的变化。
位置指令与被控量可以是直线位移或角位移。
随着工程技术的发展,出现了各种类型的位置随动系统。
由于发展了力矩电机及高灵敏度测速机,使伺服系统实现了直接驱动,革除或减小了齿隙和弹性变形等非线性因素,并成功应用在雷达天线。
伺服系统的精度主要决定于所用的测量元件的精度。
此外,也可采取附加措施来提高系统的精度,采用这种方案的伺服系统称为精测粗测系统或双通道系统。
通过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。
因此可根据这个特征将它划分为两个类型,一类是模拟式随动系统,另一类是数字式随动系统。
本设计——雷达天线伺服控制系统实际上就是随动系统在雷达天线上的应用。
系统的原理图如图1-1所示。
1 雷达天线伺服控制系统结构及工作原理图1-1 雷达天线伺服控制系统原理图系统的结构组成从图1-1可以看出本系统是一个电位器式位置随动系统,用来实现雷达天线的跟踪控制,由以下几个部分组成:位置检测器、电压比较放大器、可逆功率放大器、执行机构。
以上四部分是该系统的基本组成,在所采用的具体元件或装置上,可采用不同的位置检测器,直流或交流伺服机构等等。
现在对系统的组成进行分析:1、受控对象:雷达天线2、被控量:角位置m θ。
3、干扰:主要是负载变化(f 及L T )。
4、给定值:指令转角*m θ。
5、传感器:由电位器测量m θ、*m θ,并转化为U 、*U 。
雷达天线稳定平台伺服系统设计与仿真

及正 方 向。
( )甲板坐 标系 0一Xr c r,O 一 船艏 艉 1 YZ Xc 方 向,船艏 为正 ;0Y 一 垂直 甲板 平面 ,向上 为正 ; c O , 按 右手法 则 定义 。当无摇 摆时 ,目标 在 甲板 Z 一
差 ,常 采 用 机 械 稳 定 或 电气 稳 定 的方 法 来 隔离 船
De in a d S mu ain o d r tn aS a i z dP af r S r o S se sg n i lt nRa a e n tb l e lt m e v y tm o An i o
H UANG a g n Li n big
Ab t a t s r c :Th n u n e cu e y s n fs i n tem e srme tpe iin i a ay e n ti a e,te o eai g e if e c a sd b wig o hp o h aue n r cso s n lz d i hsp p r h p rt l n
} 1
● ●
量 驽
一
一
、
㈠_ _ ¨_ 『
●
,
一
一
_
_ _ I
1
0
一
f
f
●
l I _
一
~ 一
O 5
_
、
l I
l
l
_
、● _ _ _ l 一 _一 __二 _ _l . I __二 V f _ l 二 f= l = _ ● l _ ¨ .
21 0 2年
控制 方 式 的优 点 是使伺 服 电机 出于微 振状 态 ,可 以 减 小 电机 死 区 ,改 善 静 态 精 度 和 低 速 运 行 的平 稳
二维雷达转台伺服控制系统的设计与开发
二维雷达转台伺服控制系统的设计与开发二维雷达转台伺服控制系统的设计与开发引言随着科技的不断进步和应用的广泛推广,雷达技术在军事、民用、科研等领域起着重要作用。
而二维雷达系统中的转台伺服控制系统是实现雷达目标跟踪和测量的关键部分。
本文将介绍二维雷达转台伺服控制系统的设计与开发过程,通过分析系统的结构、功能和工作原理,进一步提升系统的控制性能和稳定性。
一、系统设计理念和要求二维雷达转台伺服控制系统的设计是基于对雷达运行过程中需要实现的目标跟踪和测量要求的分析。
系统要求具备以下特点:1.精确性:转台伺服控制系统需要能够精确定位并跟踪目标,准确测量目标与雷达之间的距离和方位角。
2.稳定性:系统需要具备稳定的控制性能,能够快速响应信号,抵抗外界干扰和噪声。
3.可靠性:转台伺服控制系统要求具备高可靠性,保证雷达在长时间运行中的稳定性和准确性。
4.可扩展性:系统需要能够灵活适应不同工作环境和场景的需求,并具备可扩展性。
二、系统结构设计基于对系统设计理念和要求的分析,我们提出了以下系统结构设计方案:1.硬件结构:转台伺服控制系统由转台部分、伺服电机、传感器和控制器等组成。
其中转台部分实现转动功能,伺服电机驱动转台运动,传感器用于获取目标信息,而控制器根据传感器数据实现对伺服电机的精确控制。
2.软件结构:软件部分主要是指转台控制算法和数据处理模块。
转台控制算法主要根据传感器数据计算出目标的位置,再通过控制器将控制信号传递给伺服电机实现转台的定位和跟踪。
数据处理模块负责对获取的数据进行处理和分析,提取有效信息并进行存储和显示。
三、系统功能设计基于系统的设计理念和要求,我们确定了以下系统功能设计:1.目标跟踪功能:通过传感器获取目标的信息,计算目标的位置和方位角,并通过控制算法实现对伺服电机的控制,实现目标的准确跟踪和定位。
2.测量功能:通过传感器获取雷达和目标之间的距离和方位信息,根据传感器数据进行精确计算,实现目标与雷达的测量。
雷达天线控制系统的设计.doc

雷达天线控制系统设计摘要本课题研究的雷达天线控制系统要求具有定位和等速跟踪功能,定位控制要求精度高、响应快,等速跟踪控制要求转速平稳。
早期的雷达天控系统大多采用模拟电路实现,如需调整控制参数时,就要更换控制器中一些元件,同时受环境温度、外界干扰及元件老化等因素的影响,调节器参数都会发生变化,从而影响控制性能。
一般的雷达天线的性能主要取决于其伺服系统的设计水平。
伺服系统的设计包括结构设计和控制设计两部分,这两部分是相互影响紧密耦合的。
一般所采用的设计方法是对结构系统和控制系统先分别设计,然后再根据要求进行调校,这往往会导致产品研制的周期长、成本高、性能差、结构笨重,不能保证伺服系统总体的综合性能最优。
针对雷达天线伺服系统设计中存在的结构设计与控制设计相分离的问题,提出一种结构与控制集成优化设计的模型,即采用手轮控制和电路自动化控制相结合的方式完成。
本文以雷达天线控制系统的研制为背景,设计了系统总体方案。
雷达为机动型远程警戒雷达,天线在圆周360°方位中进行运转工作,在伺服系统中对天线的控制实现远程遥控和人工控制。
工作中为了有效的消除云雨气象杂波的干扰,利用空间电磁场和目标的特性,在伺服系统中对云雨气象杂波的干扰实现线极化和原极化的转换控制。
对于天线360°圆周运转状态,需要通过处理变换并把360°圆周运转的模拟方位信号转换为数字方位信号,同时为雷达各个分系统提供出方位数据;通过方位处理可实现雷达寻北,对方位数据进行自动教北。
天线在架设时应进行升降俯仰控制,通过控制可安全操作升降俯仰。
关键词:雷达,天线,控制,精度,伺服Radar antenna control system designSummaryResearch of radar antenna control system requires a positioning and velocity tracking, positioning control requires high precision and fast response, speed speed tracking control requirements, such as stable. Most of the early days of radar controlled systems used analog circuits, need to adjust control parameters, it is necessary to replace the controller components in and influenced by environmental factors such as temperature, outside interference and component aging effects, changes regulator parameters, thus affecting performance.General performance of radar antenna mainly depends on the level of its servo system design. Design of servo system design including design and control of two parts, interaction between these two parts are tightly coupled. General system design method is used to structure and control system design, respectively, and then adjusted according to the requirements, which often leads to long product development cycles, high cost, poor performance, structure of heavy, cannot ensure the overall performance of optimal servo system. For the radar antenna servo system design of structure and control design of phase separation problem, proposed a model of integrated optimization design of structure and control, using hand wheel completed the combination of control and automatic control circuit.With development of the radar antenna control system in the background of this article, designing the general scheme of the system. Radar-Mobile early warning radar, antennas work running in a circle of 360 ° azimuth, remote control for antenna servo system of control and manual control. In order to be effective in eliminating Cloud and rain weather clutter interference using spatial characteristics of electro-magnetic fields and the target, Cloud and rain in a servo system of weather clutter jamming transition control for linear polarization and the polarization. Aerial 360 °circle running condition, use the transform and simulation of running in a circle of 360 °azimuth direction of signal into a digital signal, while for the radar system with location data through North azimuth radar homing, on North azimuth dataautomatically, to teach. Elevator pitch control should be carried out when the erection of the antenna by controlling the safe operation of elevator pitch. Keywords:Radar,Antennas, Control, Precision, Servo1绪论1.1课题背景及目的进几十年来,天线和雷达都有着惊人的发展,但基本原理没有重大突破。
雷达天线测向与定位控制系统
题 目雷达天线测向与定位控制系统
英文题目Radar antenna direction findingand positioning control system
院 系
专 业
姓 名
年 级
指导教师
2014年 5 月
摘 要
正常雷达天线伺服的控制系统的通用雷达天线伺服请求定位和速率跟踪功效。定位控制精度请求高、反应快、等速跟踪要求运转不乱。雷达权衡间隙实际是丈量脉冲喷射与回波脉冲之间的时间差,因为是电磁波以光速传布,依照这个就能够换算成目标的确切距离。目标位置的测量是用锋利的光束位置测量天线。在仰角波束测量高程测量。目标是根据高度和距离高度计算。测量速度的原理是根据多普勒效应频率之间的相对运动产生的雷达和目标。目的回波频率和雷达辐射频率雷达复苏是不一样的,两者之间的差额称为多普勒频率。从多普勒频率中可以提取的重要动静之一是雷达与目的之间间距的转化率。当在雷达辨别单位存在于统一空间内的方向和干扰波,利用多普勒频雷达是不一样的,它们之间可以从杂波跟踪的干扰和检测目标。
1.4.4
从目标发射无线电波回来,雷达天线来得及从一个位置到另一个位置之前,就已经回到了它。为了从无线电波反射回到学习目标的信息(其范围,高度,距离),必须有一个像蝙蝠的耳朵像那样的东西。在雷达,这部分被称为雷达接收机,它是一个特别敏感的耳朵”。为了使雷达探测范围尽可能,雷达发射机的力量是伟大的。但在无线电波的反射功率的目标,是非常小的。用无线电,对500公里,外面的一个战士,一小部分,它的身体从功率无线电波反射回来的唯一的排放。无线电波反射回雷达天线,并进入雷达接收机,它将减少。小于1瓦特的功率[5]。长期目标反射回的无线电信号是如此之弱,一般要放大数百万倍以上,可在雷达显示器上观察到。这类夸大百万倍的使命将由雷达接收机实现。 雷达接收机和通常超外差收音机是完全相同的原则。但它不受介质、不同的短波无线电信号,但从雷达信号接收的反射超短波或微波[6]。因为是雷达的工作频率过高,所以高频信号直接夸大数百万倍,这是不容易做到因此,信号进来接收机后,务必最初把它的频率转变,是从更高的超短波或降低到一个较低的中频微波频段的频率,这就是所谓的频率。信号的频率降低,经过多次级包括晶体管或由管放大再放大,使您可以轻松地达到数百万倍放大。频率和扩增接收机是超外差接收机[4]。
自动控制原理-雷达天线伺服控制系统

自动控制理论课程设计设计题目雷达天线伺服控制系统姓名学号专业班级指导教师设计时间目录第一章绪论 (1)1.1课题背景及意义 (1)1.2课题研究的目的 (1)1.3课题研究的主要内容 (2)第二章系统的总体设计 (3)2.1系统的组成图 (3)2.2控制系统的结构图 (3)2.3系统的简化方框图及简单计算 (4)2.4系统的动态分析 (6)第三章系统的根轨迹和伯德图 (7)3.1系统的根轨迹图及分析 (7)3.2系统的Bode图及分析 (8)第四章校正设计 (10)4.2校正后的根轨迹图及分析 (12)4.2校正后的Bode图及分析 (13)第五章总结 (15)参考文献 (16)第一章绪论1.1课题背景及意义雷达天线伺服控制系统是用来控制天线,使之准确地自动跟踪空中目标的方向,也就是要使目标总是处于天线轴线的方向上的,用来精确地跟随或复现某个过程的反馈控制系统,又称随动系统,主要解决位置跟随系统的控制问题。
在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或位移速度,加速度的反馈控制系统,并要求具有足够的控制精度。
其作用是使输出的机械位移(或转角)准确地跟踪输入地位移(或转角)。
伺服系统的结构组成和其他形式反馈控制系统没有原则上的区别,它是由若干元件和部件组成的并具有功率放大作用的一种自动控制系统。
雷达天线伺服控制系统,可以准确确定障碍物的位置。
利用雷达天线伺服控制系统可以探测飞机、舰艇、导弹以及其他军事目标,信息处理、数字处理,收集、综合地面运动目标和固定目标的情报及图像,还可以探测低空飞行的威胁,为用户提供包含面广的威胁画面。
对空搜索、边搜索边测距、空地测距、自动检测;除了军事用途外,雷达在交通运输上可以用来为飞机、船只导航;在天文学上可以用来研究星体;在气象上可以用来探测台风,雷雨,乌云等等。
雷达天线伺服控制系统的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候、全天时的特点,并有一定的穿透能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达天线伺服控制系统
雷达是一种通过将电磁波辐射向目标物体并接收反射波来检测其位置和速度的设备。
雷达天线是雷达系统的重要组成部分,它将电磁波辐射出去,并接收目标物体反射回来的
信号。
雷达天线伺服控制系统的主要作用是使雷达天线保持在目标物的方向上,并能够跟
随目标物的运动轨迹进行调整。
雷达天线伺服控制系统由电机、编码器、控制器等组成。
电机通过传动系统控制雷达
天线的角度,编码器用于反馈雷达天线的角度信息,控制器则根据编码器反馈的信息,控
制电机的转动并保持天线的位置与目标物保持一致。
雷达天线伺服控制系统的优点是精度高、反应迅速、可靠性强、适应性好。
该系统可
以根据各自的需求设置不同的工作模式,以适应不同复杂的环境条件。
当雷达天线工作在
垂直方向的情况下,需要较高的精确度和控制灵敏度。
当雷达天线工作在水平方向时,需
要更快的相应速度和更小的误差范围。
在这种系统中,控制器是枢纽和核心,它对电机、编码器和其他传感器进行信号的采集、处理、分析和判断,并输出控制命令,实现天线角度的控制和跟随。
此外,控制器还
可以提供反馈信息和故障报警标志,对系统的安全性和稳定性起到重要的作用。
总之,雷达天线伺服控制系统具有重要的作用。
这种系统可以确保雷达天线达到准确、快捷、灵活的聚焦目标物的能力,以满足人们对雷达设备的多种应用需求。
为了达到最佳
的工作效率和性能,该系统必须受到严格的质量控制和保养,以保证其安全性和可靠性。