一种新型仿生机器鱼的机构设计与执行(翻译)
基于仿生机器鱼技术的水下机器人研究
基于仿生机器鱼技术的水下机器人研究水下机器人的研究和发展一直是科技界关注的焦点之一。
随着科技水平的不断提高和新技术的不断涌现,人们对水下机器人的期望也越来越高。
近年来,随着仿生机器鱼技术的发展,水下机器人领域迎来了一次新的变革。
一、仿生机器鱼技术的原理及应用仿生机器鱼研究的原理是基于鱼类的生物学特性,将其应用于机器人的设计和制造中。
仿生机器鱼能够根据自己的运动状态、环境变化等因素进行相应的调整和控制,从而达到一定的适应性、灵活性和智能化。
仿生机器鱼技术的应用领域非常广泛,包括水下探测、海洋环境监测、水下作业、深海勘探等方面。
与传统的水下机器人相比,仿生机器鱼具有更好的机动性、航行性和自适应性,能够在复杂的海底环境中执行各种任务。
二、水下机器人的研究现状及发展趋势当前,水下机器人在海洋勘探、海洋科学研究、海底资源开发等领域得到了广泛的应用。
在这些领域中,水下机器人需要具备高精度、高效率、高可靠性等特点,能够完成各种复杂的任务。
针对这些需求,科技界开展了大量的研究工作,涉及到机器人的机械结构、智能控制、材料制备等多个方面。
同时,仿生机器鱼技术的不断发展为水下机器人的研究提供了一种全新的思路和方法。
未来,水下机器人将会越来越普及和应用,随着人工智能、物联网等新技术的发展,水下机器人将具备更高的智能化和自主性,能够在更多的领域中发挥出更大的作用。
三、基于仿生机器鱼技术的水下机器人研究案例近年来,国内外的许多研究机构和企业都在开展基于仿生机器鱼技术的水下机器人研究工作。
以下是几个典型的研究案例:1. 「北京航空航天大学仿生机器人实验室」的仿生机器鱼北京航空航天大学仿生机器人实验室研制的仿生机器鱼外形逼真,能够实现自主控制、路径规划和障碍物避免等功能。
该机器鱼的研发对于提高水下机器人的智能性和机动性具有重要意义。
2. 日本东京大学研究组的多关节仿生机器鱼东京大学研究组设计的多关节仿生机器鱼由多个模块组成,能够实现自主航行、鱼群协作等功能。
一种六自由度仿生机器海豚

一种六自由度仿生机器海豚
谭祖玮;张骋浩;孙卓慧;高南;贾永霞;谢广明
【期刊名称】《兵工自动化》
【年(卷),期】2022(41)12
【摘要】为提升机动性与灵活度,设计一种具有图像传输功能的六自由度仿生机器海豚。
对机器海豚的刚性头部、偏航腰部和两关节俯仰尾部的四关节系统进行设计;采用Arduino Uno3单片机输出PWM信号控制7路舵机,制定电气系统控制方案和防水密封方案,利用PS2手柄遥控机器海豚,通过尾部两关节上下摆动实现推进,腰部偏航关节实现转弯,舵机驱动配重块和一对单自由度的胸鳍实现俯仰姿态调节,通过实验验证方案的可行性。
结果表明,该设计能实现机器海豚加减速前进、偏航、俯仰、原地转弯和双胸鳍拍水的运动姿态。
【总页数】5页(P25-29)
【作者】谭祖玮;张骋浩;孙卓慧;高南;贾永霞;谢广明
【作者单位】清华大学航天航空学院;清华大学力学国家级实验教学中心;北京大学工学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种基于STM32的多自由度机器海豚的设计
2.一种双自由度胸鳍仿生机器鱼
3.一种三自由度仿生咀嚼机器人的建模与分析
4.我校又获批1个国家级5个省级一流本科专业建设点
5.规模化猪场饮水装置的选择比较
因版权原因,仅展示原文概要,查看原文内容请购买。
机器鱼论文

仿生机器鱼国内外研究现状及分析摘要:介绍了鱼类推进模式的分类及特点,分析了仿生机器鱼的特点。
介绍了国内外仿生机器鱼研制的成果和现状,在此基础上分析了仿生机器鱼研究面临的几个主要问题。
关键词:机器鱼;推进模式;升潜模式;现状引言长期生活在水下的鱼类,经过多年的进化,形成了十分完备的游动性能和器官。
水下推进器的设计目标希望具有效率高、速度快、灵活性好等优点,而鱼类游动恰好具有这些优点,从而在世界范围内兴起了仿生机器鱼研究的热潮。
由于其具有的特点,从而在军事等各个方面都有广泛的发展前景。
1)要求作业时间长、范围大,但本身承载能力或承载空间有限、不能加载太多能源的场合;2)要求机动性能高的场合,如管道检测,管道内部结构复杂,采用微小型机器鱼可较好地完成作业任务;3)海洋生物观察.常规螺旋桨推进器噪声大,对环境的扰动大,使水下运动装置很难接近所要观察的海洋生物,采用微小型机器鱼有望解决这一问题;4)海底勘探及海洋救捞等。
采用仿生推进方式可以容易地进入环境复杂的海洋空间,如沉船内部,珊瑚礁群,完成常规潜器所不能完成的作业任务;5)军用方面。
由于机器鱼噪声低、对环境扰动小、不易被声纳发现、易于隐蔽,它不仅为人们研制新型高效、低噪声、机动灵活的柔性潜艇提供了新的思路,而且可直接进行水下侦察,发现敌方雷区,跟踪及摧毁敌方潜艇。
鉴于仿生机器鱼的诸多优点,国内外学者越来越重视新型仿生机器鱼的研究与开发,取得了很多阶段性的成果,设计了各种各样的机器鱼样机,机器鱼的理论和实验研究已渐显规模。
1、仿生机器鱼的分类及特点1.1、鱼类推进模式分类1)喷射式。
乌贼、鱿鱼、水母等依靠身体躯干的特殊构造,它们由身体内部的特殊部位向后挤压水流产生后向推力,利用动量守恒定理向前推进。
2)鳗鲡模式。
即鳗行式,如鳗鱼、水蛇等,如图1所示,它们的游动犹如正弦波形的前进一样,把身体当作推进器,用从头到尾波动身体来游动。
3)醪科模式。
波动主要集中在身体后2/3部分,推进力主要由具有一定刚度的尾鳍产生,推进速度和推进效率较鳗鲡模式高,在速度、加速度和可控性三者之间有最好的平衡。
仿生机器蝠鲼动力学建模及试验研究

仿生机器蝠鲼动力学建模及试验研究陈国军, 林羊龙, 金 俊, 陈 巍, 杨 雪(南京工程学院 工业中心, 江苏 南京, 211167)摘 要: 仿生机器蝠鲼独特的胸鳍摆动推进方式更适合风浪干扰环境下长航时水下作业需求, 国内外已经开展了相关研究, 但目前仿生机器蝠鲼研究中存在驱动能力弱、控制精度低、仿生效果差等问题。
文中以蝠鲼为仿生原型, 分析其生物学特性和运动机理, 构建运动学模型和动力学模型, 为仿生机器蝠鲼的系统设计提供了理论依据, 设计了机械结构和控制系统, 通过模拟波浪干扰环境下的直线前游、原地转弯和动态沉浮等试验, 测试了仿生机器蝠鲼在复杂环境下的性能, 验证了仿生机器蝠鲼的运动性能和应用前景。
关键词: 仿生机器蝠鲼; 生物学特征; 运动控制; 机械结构中图分类号: U674.94; TJ630 文献标识码: A 文章编号: 2096-3920(2024)01-0040-08DOI: 10.11993/j.issn.2096-3920.2023-0107Dynamic Modeling and Experimental Study ofBiomimetic Robotic Manta RayCHEN Guojun, LIN Yanglong, JIN Jun, CHEN Wei, YANG Xue(Industrial Center, Nanjing Institute of Technology, Nanjing 211167, China)Abstract: The unique pectoral fin swinging propulsion method of biomimetic robotic manta ray is more suitable for long-term underwater operations in wind and wave environments. Relevant research has been conducted both in China and abroad, but there are problems in the current research on biomimetic robotic manta ray, such as weak driving ability, low control accuracy, and poor biomimetic effects. This article took the natural manta ray as a biomimetic prototype, analyzed its biological characteristics and motion mechanism, and constructed its kinematics and dynamics models, thus providing a theoretical basis for the system design of the biomimetic robotic manta ray. The mechanical structure and control system were also designed. The experiments of straight forward swimming, in situ turning, and dynamic sinking and floating were carried out under simulated wave environments to test the performance of the biomimetic robotic manta ray in complex environments, verifying the motion performance and application prospect of biomimetic robotic manta ray.Keywords: biomimetic robotic manta ray; biological characteristics; motion performance; mechanical structure0 引言近年来, 水下机器人研究逐渐成为热点, 其中仿生机器鱼以其水下环境游行适应强的特点受到研究人员的青睐。
软体仿生机器鱼“打卡”万米深海
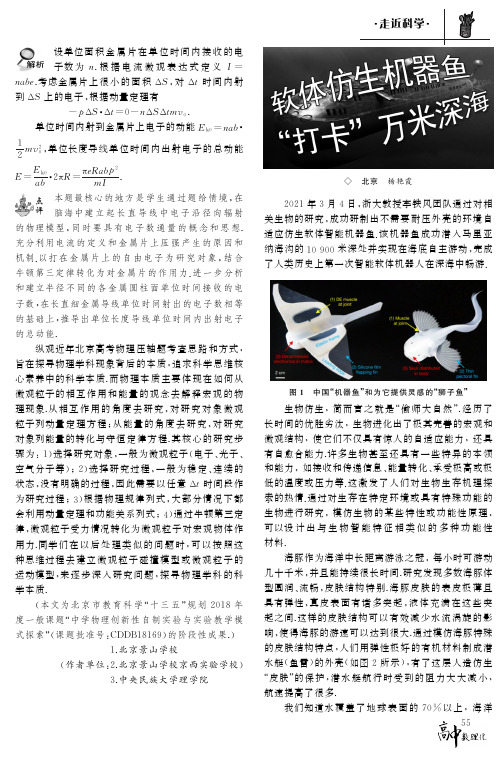
走近科学设单位面积金属片在单位时间内接收的电子数为n .根据电流微观表达式定义I =n a b e .考虑金属片上很小的面积ΔS ,对Δt 时间内射到ΔS 上的电子,根据动量定理有-p ΔS Δt =0-n ΔS Δt m v 0.单位时间内射到金属片上电子的动能E k 0=n a b 12m v 20,单位长度导线单位时间内出射电子的总动能E =E k 0a b 2πR =πe R a bp 2m I.本题最核心的地方是学生通过题给情境,在脑海中建立起长直导线中电子沿径向辐射的物理模型,同时要具有电子数通量的概念和思想.充分利用电流的定义和金属片上压强产生的原因和机制.以打在金属片上的自由电子为研究对象,结合牛顿第三定律转化为对金属片的作用力.进一步分析和建立半径不同的各金属圆柱面单位时间接收的电子数,在长直细金属导线单位时间射出的电子数相等的基础上,推导出单位长度导线单位时间内出射电子的总动能.纵观近年北京高考物理压轴题考查思路和方式,旨在探寻物理学科现象背后的本质,追求科学思维核心素养中的科学本质.而物理本质主要体现在如何从微观粒子的相互作用和能量的观念去解释宏观的物理现象.从相互作用的角度去研究,对研究对象微观粒子列动量定理方程;从能量的角度去研究,对研究对象列能量的转化与守恒定律方程.其核心的研究步骤为:1)选择研究对象,一般为微观粒子(电子㊁光子㊁空气分子等);2)选择研究过程,一般为稳定㊁连续的状态,没有明确的过程,因此需要以任意Δt 时间段作为研究过程;3)根据物理规律列式,大部分情况下都会利用动量定理和功能关系列式;4)通过牛顿第三定律,微观粒子受力情况转化为微观粒子对宏观物体作用力.同学们在以后处理类似的问题时,可以按照这种思维过程去建立微观粒子碰撞模型或微观粒子的运动模型,来逐步深入研究问题,探寻物理学科的科学本质.(本文为北京市教育科学 十三五 规划2018年度一般课题 中学物理创新性自制实验与实验教学模式探索 (课题批准号:C D D B 18169)的阶段性成果.)(作者单位:1.北京景山学校2.北京景山学校京西实验学校3.中央民族大学理学院)Җ㊀北京㊀杨艳霞㊀㊀2021年3月4日,浙大教授李铁风团队通过对相关生物的研究,成功研制出不需要耐压外壳的环境自适应仿生软体智能机器鱼.该机器鱼成功潜入马里亚纳海沟的10900米深处并实现在海底自主游动,完成了人类历史上第一次智能软体机器人在深海中畅游.图1㊀中国 机器鱼 和为它提供灵感的 狮子鱼生物仿生,简而言之就是 偷师大自然 .经历了长时间的优胜劣汰,生物进化出了极其完善的宏观和微观结构,使它们不仅具有惊人的自适应能力,还具有自愈合能力.许多生物甚至还具有一些特异的本领和能力,如接收和传递信息㊁能量转化㊁承受极高或极低的温度或压力等.这激发了人们对生物生存机理探索的热情.通过对生存在特定环境或具有特殊功能的生物进行研究,模仿生物的某些特性或功能性原理,可以设计出与生物智能特征相类似的多种功能性材料.海豚作为海洋中长距离游泳之冠,每小时可游动几十千米,并且能持续很长时间.研究发现多数海豚体型圆润㊁流畅,皮肤结构特别.海豚皮肤的表皮极薄且具有弹性,真皮表面有诸多突起,液体充满在这些突起之间.这样的皮肤结构可以有效减少水流涡旋的影响,使得海豚的游速可以达到很大.通过模仿海豚特殊的皮肤结构特点,人们用弹性极好的有机材料制成潜水艇(鱼雷)的外壳(如图2所示),有了这层人造仿生皮肤 的保护,潜水艇航行时受到的阻力大大减小,航速提高了很多.我们知道水覆盖了地球表面的70%以上,海洋55走近科学图2㊀潜艇发射和海洋底部有丰富的矿产和生物,吸引科学家对这个领域探索的热情,但是因为海底极端的环境条件,需要经过特殊的技术设置才有可能使探测器潜入海底进行勘测考查,成本相当之高,因此人们对深海的了解极少.作为目前已勘探到的海洋的最深处,马里亚纳海沟完全黑暗,温度极低,水压极大,有众多的未知因素,有 地球第四极 之称.但是研究发现,在深度区域为6000米到11000米的马里亚纳海沟,生存着数百个物种生物,而深海狮子鱼就是其中最具有代表性的一种.这激起了人们对这种特殊生物研究的热情.由于长期生存在黑暗的海底,深海狮子鱼与视觉相关的基因和与皮肤色素相关的基因大量丢失,导致其失去视觉,不再反射可见光,通体透明,而且形态也发生了奇妙的变化.深海中极高的压力环境对骨骼会有致命的影响,而深海狮子鱼没有坚硬的外壳,依旧可以承受近百兆帕的压力,在深海中灵活游动.我们知道深潜器在深度为3000米到11000米的深海中探索时,即使有刚性外壳的保护,仍然可能会承受不住极端环境,结构被损坏.那么狮子鱼柔软的身体为何可以承受住巨压呢?我们是否可以借鉴狮子鱼独特的结构和生理特征,研制出无需耐压外壳的自适应生物仿生器呢?研究发现,狮子鱼具有独特的结构,其骨骼在凝胶状的柔软身体中呈细碎状分布,这有利于狮子鱼在高压的环境中生存.受深海狮子鱼奇特构造启发,研究团队通过模仿狮子鱼的头部骨骼分散融合在软组织中的特点,巧妙地选用质地软㊁韧性高的透明状硅胶来塑造机器鱼的骨架,使功能性的电子器件尽可能最大程度分散于软硅胶机身中,以减少元器件之间的剪切应力.通过这样巧妙设计出的仿生机器鱼,即使没有耐压金属外壳的保护,也能够承受住极高的静水压.克服了深海极高的压力问题,如何让机器鱼在水中游动起来呢?如图3所示,仿生鱼有两个像翅膀一样能够拍动的侧鳍,通过在机器鱼身上设置 人工肌肉 可以驱动这对 翅膀 .用在机器鱼身上的 人工肌肉 使用的是在电压刺激下能够产生形变的介电弹性材料.当机器鱼中产生电信号时,弹性体的高分子薄膜就会产生如肌肉般的张弛形变.机器鱼身上的这种 人工肌肉 克服了高分子材料在低温和高压时电驱动能力衰减的问题. 人工肌肉 是依靠电来驱动的,因此需要正极和负极,一般是在机器鱼的正反面各涂上一层,外层是负极,内层是正极.但是我们知道人工机器鱼是软的,电极有一定的硬度,会影响 人工肌肉 的灵活性.而海水具有弱电性,利用 人工肌肉 周围的海水作为负极,既没有束缚,又可以牢固贴合.依靠机器鱼自带的电源在 人工肌肉 内外两侧产生电势差,从而使得两个侧鳍产生舒张或收缩形变,引起 翅膀上下拍动,推动机器鱼在深海中游动.图3㊀机器鱼深海海试通过模仿深海狮子鱼独特的身体结构特点,借助先进的科学技术,研究团队最终设计的仿生鱼重量大约为150g ,约一张A 4纸大小,身姿轻柔灵动,机动性能比传统深海潜行器更好,能承受住的压力高达1100个大气压.该款机器鱼随深海着陆器潜入10900米海底后,在2500毫安的锂电池驱动下,可以按照预定指令来拍动侧鳍,扑翼运动时间可达45分钟.相比传统的深潜器需要以高强度高韧性的合金材料为 硬核 ,并辅以先进的焊接和设计工艺,才能承受得住万米海底极高的压力.我国自主研制的这款软体仿生智能机器鱼首次采用以柔克刚的方法,在不需要耐压外壳的情况下,可以适应深海极端的环境,潜入万米深海并在海底自主畅游.而且这款轻柔新型仿生鱼成本要比传统深潜器低很多,大大降低了深海探测的成本和难度,首次实现深海探测机器人的柔性化㊁小型化和智能化,促进了柔性智能设备走向深海作业.(作者单位:清华大学附属中学)65。
1 项目名称:仿生机器鱼高效与高机动控制的理论与方法

1.项目名称:仿生机器鱼高效与高机动控制的理论与方法2.推荐单位:中国科学院3.项目简介:本项目属于机器人控制学科。
鱼类历经千万年的进化,适应了复杂的水下环境,形成了高效率、高机动性、低噪声的游动推进运动模式,其运动学、水动力学的研究对于高效、低噪、节能、高机动性的新型高性能水下运载器具有重要而深远的影响。
本项目深入研究如何将鱼类游动推进模式引入仿生机器鱼的设计与控制,提出了仿生机器鱼建模与控制的理论和方法,为新型高效、低噪、高机动性的仿生机器鱼系统开发提供了理论基础。
主要科学发现为:1.首次提出了描述鱼体周期性形变运动的“基波”概念,建立了仿生机器鱼的鱼体波模型,提出了多关节仿生机器鱼稳定游动推进的控制方法,并利用研制完成的仿生机器鱼验证鱼类游动推进机理。
2.率先提出基于C曲线的动态轨迹法来实现仿生机器鱼的高机动转弯运动,构建了仿生机器鱼三维空间复杂机动运动的智能控制方法体系框架,系统地验证了浮潜、定深、快速起动、急转弯、转向等仿生机器鱼的运动控制,并首次完成了机器海豚滚翻运动和跃水运动。
3.提出仿生机器鱼的多连杆机构优化指标设计方法,推导了仿生机器鱼稳态游动下的受力描述,提出基于神经网络模型的机构优化方法并证明了该方法的全局指数稳定条件,通过机构优化提升了仿生机器鱼游动性能。
4.构建了多仿生机器鱼系统基于局部信息感知和有限通讯条件的协作框架和协调机制,提出分布式鲁棒自适应神经网络控制方法,证明了有限通讯条件下多仿生机器鱼系统同向游动的充要条件,实现了多仿生机器鱼系统协作完成编队、搬运、监控等作业。
八篇代表作Web of Science他引358次;20篇核心论文专著Web of Science 他引602次。
引文来自IEEE Transactions on Robotics等本领域国际权威学术刊物,引文作者包括MIT等大学、研究机构的学者,30余位IEEE Fellow。
撰写图书3 部,获授权发明专利15项,获中国科学院优秀博士论文一次、北京市优秀博士论文一次。
机器鱼装配介绍ppt课件
控制板图示
GND 地 VCC 正电源 舵机2地 舵机2电源 舵机2信号线 舵机3地 舵机3电源 舵机3信号线 舵机1地 舵机1地 舵机1地 LED负 LED正 LED正 LED负 电源灯 编程线 天线
晶振
ATmega128
24C02 74HC04
舵机
黑红白三根线
黑色-GND 红色-VCC 白色-信号线
遥控测试
直游 转弯 改参数 改频率
机器鱼常见故障及处理方 法
易出问题的地方
串口设置 电源电压 开关是否打开 接线不牢固 漏水 焊接不牢固 通讯模块坏 程序问题 控制器坏
线路板检测
电源电压 PWM信号产生
改进计划
鱼头色标改进 充气孔改进 鱼头形状改进 鱼头鱼皮套连接方式改进 尾鳍改进 胸鳍改进
封装
将线路板和 控制板塞入鱼头 对准安装孔 旋紧螺丝:旋螺丝要四边用力均匀,让整个鱼尾与鱼头壁两边的间隙相等 剪鱼皮套、套鱼皮套:要让鱼皮套自然不扭曲 粘鱼皮套:用橡胶粘合剂粘。要让鱼皮套自然不扭放入水中 在外面加装配重块:用橡皮筋套,或打胶枪粘。 拆鱼,配重 重新封装 配重
测试
电池电压:5V以上 控制板测试
• • • • • • 检查电源 检查单片机PWM端口输出波形 烧写Bootloader 9600测试通讯 烧写应用程序 读取24C02的数据是否正确
电机测试
• 摆动测试 • 1500测试:是否抖动
通讯测试
• 烧写程序 • 通讯距离
尾部组装
仿生机器鱼的研究不仅具有很高的理论研 究价值,而且在水下资源探测、海上搜救、 水下考古、打捞救助、海底地质地貌勘测、 军事侦察等方面具有广阔的应用前景。
机器鱼研究历史
慧鱼机器人课设(说明书).
课程设计报告学生姓名:XXX 学号:201131xxxx学院: 机械工程学院班级: 机械xx班题目: 慧鱼组合机器人的组装设计指导教师:陈国君职称: 高级工程师 2014年 12 月 31 日目录1.绪论 11.1课题背景 11.2 慧鱼机器人 21.3 走进实验室 21.4 按键式传感器 31.5 设计工作原理 31.6慧鱼模型操作规程 52.四足仿生机器人(乔)52.1四足仿生机器人简介 52.2四足仿真机器人模型 62.3四足仿生机器人仿真程序 72.4四足仿生机器人连线图和结构简图 73. 双足步行仿生机器人(吉姆)83.1双足步行机器人简介 83.2机械部分设计 83.3工作原理和系统线路图 93.4双足步行机器人结构简图和仿真模型 93.5双足步行机器人仿真程序 104.1任务分配 11一、绪论慧鱼创意组合模型是一种技术含量很高的工程技术类拼装模型,是展示科学原理和技术过程的理想教具。
本设计是以德国慧鱼创意积木所组成的仿生模拟机器人为其基本架构,透过人机界面LLwin,经由智慧型微电脑界面去驱动机器人,使机器人细部动作很容易达到我们的需求,进而取代以往由硬件描述语言所驱动架构。
通过慧鱼模型的组装,程序的编制,任务的完成,阐述机械机构之间的配合关系,各种传感器的安装和使用,以及软件程序的编制思维,实现对伺服电机的控制,不但操作简单,更可使我们了解机械运作的原理。
由于机器人的发展和快速广泛地被使用,可知科学家对于机器人的功能要求也相对提高,除了超强的逻辑运算、记忆能力,另外在机器人的外表及内部结构,科学家更希望模仿人类。
对于外在资讯的选集,也透过各种传感器,企图达到类似人类各种触觉的功能,选集了外在环境的资讯,一旦外在环境变化,机器人也要随之变化,做出该有的动作,更新自己的资料库,达到类似人类学习的功能。
1.1课题背景1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
仿生机器鱼三维仿真分析
学校代码:11517学号:0708071012HENAN INSTITUTE OF ENGINEERING毕业设计题目仿生机器鱼三维仿真分析学生姓名刘欢乐专业班级机械设计制造及自动化0701学号0708071012系(部)机械工程系指导教师(职称) 王新莉(教授)孟凯(助教)完成时间 2011年5月25日河南工程学院论文版权使用授权书本人完全了解河南工程学院关于收集、保存、使用学位论文的规定,同意如下各项内容:按照学校要求提交论文的印刷本和电子版本;学校有权保存论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存论文;学校有权提供目录检索以及提供本论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版;在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。
论文作者签名:年月日河南工程学院毕业设计(论文)原创性声明本人郑重声明:所呈交的论文,是本人在指导教师指导下,进行研究工作所取得的成果。
除文中已经注明引用的内容外,本论文的研究成果不包含任何他人创作的、已公开发表或者没有公开发表的作品的内容。
对本论文所涉及的研究工作做出贡献的其他个人和集体,均已在文中以明确方式标明。
本学位论文原创性声明的法律责任由本人承担。
论文作者签名:年月日河南工程学院毕业设计(论文)任务书题目仿生机器鱼三维仿真分析专业机械设计制造及自动化学号0708071012姓名刘欢乐主要内容、基本要求、主要参考资料等:选题背景:鱼形机器人不仅可以用于水下考古、水中摄影、探查狭窄水道、测绘海底地形地貌,还可进行水中养殖和捕捞,并作为水下微小型运载工具,在抢险搜救等工作中发挥重要作用。
主要内容:设计一款机器鱼的执行机构,对设计的机构进行三维仿真研究。
基本要求:建立三维模型,进行仿真研究,完成实物制作,提交设计说明书等设计相关资料。
主要参考资料:机电一体化系统设计传感器技术机器人技术机构设计相关科研论文10篇完成期限:指导教师签名:专业负责人签名:年月日目录摘要 (I)ABSTRACT (II)1 引言 (1)1.1 本文研究的目的及意义 (3)1.2 国内外研究现状 (4)1.2.1 国内研究现状 (4)1.2.2 国外研究现状 (6)1.3 论文的主要研究内容 (8)2 仿生机器鱼的机构设计概况 (9)2.1 仿生机器鱼的机构 (9)2.2 舵机设置 (10)3 仿生机器鱼的三维建模与运动分析 (12)3.1 建模软件的选取 (12)3.2 仿生机器鱼的三维实体建模 (13)3.2.1 仿生机器鱼鱼头和鱼尾的三维建模 (14)3.2.2 仿生机器鱼鱼身的三维建模 (15)3.2.3 虚拟装配 (17)3.3 仿生机器鱼的运动分析 (17)4 仿生机器鱼的三维仿真实现 (19)4.1 仿生机器鱼三维仿真的简介 (19)4.2 仿生机器鱼三维仿真 (20)结论与展望 (25)毕业设计工作总结 (27)致谢 (28)参考文献 (29)仿生机器鱼三维仿真分析摘要本文首先对小型鱼类现有的研究进行了描述,表明了鱼类在水下的优势对仿生机器鱼的研究发展将起到重要作用。
慧鱼
慧鱼机器人简介慧鱼模型1964年,慧鱼创意组合模型(fischertechnik)诞生于德国,是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。
慧鱼模型背景及构成机器人这个词,第一次出现在Carel Capek 1923年的小说《Golem》(有生命的假人)中,这个人造的主人公因其高超的本领代替了人。
上个世纪的三四十年代,机器人多少更像一种自动机器。
以至于今天,当我们回顾人们曾用闪光灯作为机器人的眼睛从而使其具有人类特点的种种尝试,总会让人忍俊不禁。
这些机器几乎没有什么“智能化”或者“灵活性”可言。
随着控制学对机器人技术的影响日益深刻,机器人的设计也伴随电子电路的出现而越发接近现实了。
直到今天,机器人的智能化仍然是许多公司、科研院所和高等学校不断研究和探索的重要课题。
自动化控制理论(Cybernetics)为解决这一问题带来了生机。
“自动化控制”一词来源于希腊语(Kybernetes)。
原意指的是希腊轮船上领航员,其任务是指挥航行方向并绘制到达目的地的航行路线。
无疑,自动化控制理论本来是要使机器人变聪明。
但是如何实现呢?我们先用一个启发式实验进行说明。
我们可能都观察过飞蛾趋光的特点,飞蛾找到光源,向那里飞去,即使非常近的距离,也绝不会拍打到光源。
显然飞蛾之所以能够这样做,是因为它发觉光源,划出路线然后再向其扑去。
这本领是基于这种昆虫自身具备的机敏的行为模式。
现在我们将上述能力应用到一个技术系统中。
先用光学传感器探测到光源,马达执行动作,这样,我们必须在发现信号和执行信号之间建立一个合理的连接,即程序。
20世纪50年代,一位名叫沃特格雷(Walter Grey)的英国人将上述引人思考的实验付诸于实践。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种新型仿生机器鱼的机构设计与执行(翻译)一种新型仿生机器鱼的机构设计与执行摘要引入了一种机器鱼的机构设计方法。
基于这种方法,设计一种带有胸鳍和尾鳍的自主三维运动机器鱼。
胸鳍是三自度机器,使得机器鱼能够通过控制两个胸鳍来实现偏航和纵向运动。
而尾鳍机构设计是基于拟合机器鱼波状与运动曲线。
向前的速度可以通过改变尾部机构摆动频率来实现。
最后给定机器鱼的物理执行机构和实验结果。
关键字:仿生,鱼体波形,机械,机器鱼,胸部,尾部0.介绍许多机器人概念的设计源于自然界,因为自然选择已使得生物对环境有很好的适应性。
一个典型的例子就是鱼推进机理的研究,这个研究可以提高水下航行器的性能。
不同于传统的螺旋桨推进的水下航行器,鱼依赖于鳍和尾部的运动来提供向前的推力。
对于真实鱼科学研究发现,这种推进方式能产生更高效率的推力并且产生的噪声很小。
受这种发现的激发,许多学者已经开始致力于研究机器鱼,以具有高速和操纵性良好的小型水下航行器的发展提供更多的线索。
先前有关机器鱼发展的努力工作可以追溯到1991年robotuna的triantafyliou等人的著作。
装有柔性尾部和上下摆动薄片的机构能够产生额外的流体动力以产生推力,robotuna得出了这种方式的许多优点,包括能源的节约和长任务持续时间。
在这个成功的例子之后,许多机器鱼被研究用于不同的目的。
为了证实鱼胸鳍的作用,kato在1995年制作了“黑鲈鱼”号,这条“鱼”配备了胸鳍状机构。
实验结果表明波状运动和一对胸鳍的引导共同决定了向前,向后,悬停和旋转运动。
在20XX年,Guo等人呈现了一种类似鱼的水下微型机器人的原型。
这种机器人有两个独立控制的尾鳍,一个体姿态调整器和一个浮力调整器。
为了认识三自度的游动,一种离子控制聚合体薄膜激励被利用来作为伺服激励。
在20XX年,koichi设计了一种机器鱼的原型。
它的体长大概600mm并且它带有三个铰链连接的尾部,这些铰链的运动是通过两个带有初始链接结构的补助马达间接变速装置来激励的。
Yu进一步发明了一种带有速度控制、四铰链连接的仿生机器鱼,它是使用柔性尾部和震荡薄片作为推进器的。
机器鱼的游动速度是通过铰链连接震荡频率来调节的,它的方向是通过铰链连接的偏转差异来控制的。
必须说明的是上述所有的研究是基于体设计和尾鳍推进或胸鳍推进。
然而,鱼可以展示不仅仅一种游泳模式,在不同的时间有不同的速度。
中线和成对鳍常规的联合使用,以两者的不同贡献以提供推力,从而获得平滑的轨迹。
此外,许多鱼类通常使用MPF模式来搜索食物,因为这种模式可提供高的机动性并具有向高速和高加速的BCF模式转换的能力。
在中,我们制作了一种带有两个推进尾鳍和两个使鱼倾斜及偏航的胸鳍的机器鱼。
一些传感器被嵌入进来以提供环境信息,比如温度、压力、图像信息和障碍物。
1、胸鳍机构的设计和它的工作环境分析胸鳍运动方式的研究吸引了很多学者。
根据参考论文[12-14],胸鳍的运动可以划分为划模式和拍打模式两种。
前者在低速情况下效率更高,然而基于升力的拍打模式在高速模式下效率更高。
Blake总结了划模式包括两次击打:力量击打和回复击打。
在力量击打阶段,胸鳍以大攻角向后运动以获得推力,同时在回复击打阶段胸鳍平行于水面划行以减少阻力。
Webb把拍打运动周期分为三个阶段:诱导,内收和折射。
更一般的说,在诱导阶段鳍远离身体向下运动。
然后收回体表面,而在折射阶段鳍通过绕其主导边缘旋转运动回到初始位置。
Westneat和Walker从鱼体侧面视角来划分鳍顶端轨迹。
胸鳍顶端轨迹8路径几乎和体轴及运动方向垂直。
根据划和拍打模式及其鳍顶端轨迹可知,每个胸鳍至少需要两自度。
换一句话说,对于两个胸鳍需要4个自度。
然而,3自度已经足够了,因为两个胸鳍的顺流模型是一致的。
图1给出了一个胸鳍机构。
图1 胸鳍机构胸鳍的物理尺寸主要包括平面结构和翼型截面。
平面外形可以分为三角翼,不规则四边形翼和椭圆形翼等。
椭圆形翼被选作为胸翼的平面结构。
因为胸翼主要是用来控制机器鱼的游动方向,低速翼型被选作为胸翼的截面。
图2给出了胸翼的外形,其翼型是NACA23012。
胸翼的方位角面积。
其中全长,翼型图2 胸鳍的外形和它的翼型选择为了控制胸鳍的运动,有必要分析胸鳍的工作空间。
因为左右胸鳍有同样的机构,在这里仅仅研究有胸鳍的工作空间。
有胸鳍机构被看作是两节铰链,如图3。
坐标系a固连在连接件根部a,坐标系b固连在铰链中心,坐标系c固连在杆b的末端。
所有坐标系的x轴均平行于鱼的头-尾轴并指向鱼的头部,而y轴指向侧面方向。
坐标系b相对于坐标系a的转换关系是其中a是坐标系b相当于坐标系a的旋转角。
坐标系c 相对于坐标系b的转换关系是其中是坐标系c相当于坐标系b的旋转角。
因此坐标系c相对于坐标系a的转换矩阵为在这个机构当中,绕轴Ya旋转的角度限制在0o~90o,绕轴Xb旋转的角度限制在-90o~90o。
当节点a不动而节点b 从-90o~90o旋转时,胸鳍顶端轨迹为一个半圆弧。
进一步,当节点a和b都旋转时,胸鳍顶端轨迹变成一个半球表面,这个表面是胸鳍顶端能够达到的工作区间。
图3 胸鳍机构的坐标系统胸鳍工作区间的分析对机器鱼的进一步游动控制提供了基础。
在当中胸鳍运动有两种方式:划和拍打。
在低速时,机器鱼向前游动是通过胸鳍的拍打运动实现的,在坐标系a 中侧面看鳍顶端轨迹如图4。
全推力阶段包括两次击打:力量击打和恢复击打。
力量击打阶段是从起始点p1到点p2或p4到p5。
在这个击打过程中,胸鳍移动是以大攻角垂直于游动方向并且推力主要来自于这个击打过程。
恢复击打过程是从p2通过p3到p4或者从p5通过p6到p4。
在这个击打过程中,胸鳍收回以准备下一次的力量击打。
当游动状态转换成为高速游动。
机器鱼的推力是通过胸鳍的拍打运动来实现的,在坐标系a中鳍顶端轨迹从侧面看如图。
拍打运动全推力过程分为三个阶段:诱导,内收和折射。
诱导阶段是从初始点p1到p2或者从p4到p5。
在诱导阶段,胸鳍使鱼体向前移动,在这个阶段不仅仅产生推力还产生升力。
内收阶段是介于诱导和折射之间,是从p2到p3或者从p5到p6。
胸鳍在内收阶段收回以准备折射阶段,这个阶段对机器鱼的运动的作用非常小。
折射阶段从p3到p4或从p6到初始点p1。
在折射阶段,胸鳍远离机器鱼身体并且这个阶段同样能够产生推力和升力。
图4 划模式和拍打模式胸鳍顶端的轨迹胸鳍产生的推力不仅仅依赖于鳍顶端轨迹而且还依赖于鳍顶端轨迹上每个点的攻角。
攻角不是随机的而是在每点轨迹服从方程式。
设nc和na分别代表坐标系c和坐标系a 中胸鳍约束的方向,nc=|-1,0,0|,na='其中Rac在方程式中给出了。
是坐标系a中流动速度矢量,其中v是流动的绝对速度。
因此攻角。
2、基于鱼体波动理论的尾部机构的设计基于鱼行为的研究表明当鱼向前游动时从头部到尾部存在游动波。
从头部到尾部的游动波的幅度是引人注目的,并且游动波的速度明显大于鱼推进的速度。
基于鱼体波动理论,设计一个包含驱动机构和波动机构的尾部机构,图5给出了示意图。
驱动机构主要包括一个马达,三个齿轮,两个凸轮和两个滑动杆。
马达输出轴驱动两个啮合齿轮,然后传递旋转运动给两个此案话的凸轮。
但是两个变化的凸轮旋转方向相反,并且驱动两个滑动杆以在挤压中产生互换的滑动。
两个滑杆被用来驱动尾部波动机构,这个机构是两个铰接在尾鳍的曲柄滑块机构构成的。
这种波动机构可以看成是两个铰接链通过一个马达驱动的,并且铰链相对于主轴的角度是通过两个变化的凸轮来控制的。
图5 尾部机构在给定尾部机构的主要尺寸之前,先介绍鱼体波动理论。
对于RoboTuna的相关游动模型已经在Barret等人的著作中给出了,他们的波动运动是假定采取游动波模型,这个模型是来自于Lighthill。
其中。
代表了鱼体横向位移。
x代表了沿主轴位移,k代表了体波数,是体波长,c1是直线波),T是体波周期。
然一旦体波函数给定,接下来的事情是选择合适的体运动学参数系列而,最优化机器鱼的推进效率的工作是机器费力的。
因为电脑控制是数字控制,机器鱼体波函数需要离散化。
鱼体波可以分为两个部分:a)一个波周期里时间独立样条曲线序列在式给出了描述;b)依赖时间的波频率,这代表了机器鱼没单位时间的波动时间。
其中i代表了样条曲线序列中第i个样条曲线;M代表了体波分量,这代表了在一个波周期里鱼体波的离散阶,并且相对于舵机的最大最大旋转频率有一个上限。
为了拟合体波曲线,必须定义一个相关波长R,这是鱼体相对鱼整个正弦波的振荡比率。
当R等于0时,整个鱼体看起来就是一个固体杆;当R=1时,整个鱼体做完全正弦波运动;当R等于一个适当的值时,鱼将在水里稳定有效的航行。
在图6中,鱼体波可以在是终端联接。
设每个联接的长度为范围通过前后联接来固定,并且尾鳍相应的联接角为。
在这里,的实。
机器),并且机器鱼的游动速度依赖际值没必要确定,但是联接的比值应该预先确定,设鱼的游动方向依赖于鱼体的外形(联接角于波动频率f。
如果幅度系数c1,c2和参数k确定了,在任意时刻的体波都确定了。
图6 鱼体波的联接件设代表节点j在时间i相对于主轴的角度,而可以通过固定体波曲线极端得到。
那就是为了确保每个节点j固定在体波曲线并且最后一个节点固定在是说,决定一个适当的。
进一步说,必须要满足以下函数关系:。