3PRR柔性并联机构动力学分析
3PRRR并联机构的设计与优化
i n C l ng a u a g e i n t h e MA T L A B e n v i r o n en m t . A s e t fl o e n g t h s f o b r a s W O S o b t a i n e d t h r o u g h t h e o p t i m z i a t i o n d e s i g r  ̄T h e n ,
A b s t r a c t : T h e p r i m a r y g o a l i s t h e s i m u l a t i o n o p t i m i z t a i o n o fa s p a t i l a 3 d e g r e e - D , e e d o m p ra a l l e l m a n i p u l t a o r( o 3 P R R R
摘
要: 对 一 种 空 间 3 自由度 并联 机 构 ( 3 P R R R) 进 行设计与优化 , 该 机 构 是 由一 个 动 平 台与 一 个 静 平 台通 过 3个 结
构相 同的移动 副一 转动副一 转 动副一 转动 副构成的 支链 组成。分析 了机构运 动关 系, 建立 了运 动 学模 型 , 分析 滚珠丝 杠 输 出与动平 台末端位 置的关 系以及 支链各臂 转角与动平 台末端位 置关 系。在 MA T L A B环境 下利 用 C语 言编 写程 序, 以工作 空间最大化为 目标 , 对各 支链 的杆 长进行 优化 , 得 到 了相对最优 的机 构设计方案 。在 ma n u f a c t u r e t h e p r o t o t y p e .
Ke y Wo r d s : 3 P RRR Pa r a l l e l Me c h a n i s m ;W o r k s p a c e ; Mo t i o n An a l y s i s ; Op t i mi z a t i o n De s i g n
平面3-RRR柔性并联机器人动力学建模与分析

杜 兆才 , 余 跃 庆等对 平 面 3 - RR R柔 性并 联机 器 人 进 行 了分析 ] , 采 用 KE D方 法 建 立 其 动力 学 模 型 , 该 模 型没有 考虑 刚体 运 动 和 弹 性 运 动 的耦 合 , 对 系 统 约束 方程 考虑 不够 完全 。刘 增善 在其 博 士论文 中系 统地 研究 了空 间 3 - RR S柔性 并 联 机 器人 [ 8 ] , 用 简化 KE D方 法建 立 了柔 性 3 - R RS并 联 机 器 人 动力 学模 型, 并 对动 力学 特 性 进 行 了分 析 。多 伦 多 大学 机械 与工 业工 程学 院 的非线 性控 制实 验室 长期 以来 致力 于并 联 机 器 人 的 研 究 , 其 中 Wa n g X i a o y u n , Mi l l s
张 清 华 ,张宪 民
( 华南理工大学广东省精密装备与制造技术重点实验 室 , 广东 广州 5 1 0 6 4 0 )
摘要 : 轻 型、 高速 、 高 精 度 柔 性 并 联 机 器 人 在诸 如 电 子 装 配 、 精密加工与测量 、 航空航 天领域有着 巨大的应用前景 。 研 究 了一 类 平 面 3 - R R R柔 性 并 联 机 器 人 。采 用 有 限元 法 对 柔 性 杆 进 行 离 散 , 运用浮 动坐标系 , 拉 格 朗 日方 程 以 及 虚功原理 , 建 立 了平 面 3 - R R R柔 性并 联机 器人 的 刚一 弹 耦合 非 线 性 动 力 学 方 程 。该 方 程 考 虑 了 各 关 节 和 动 平 台 的 集 中质 量 和 集 中转 动 惯 量 。 详 细研 究 了 弹性 运 动 坐 标 和 刚 体 运 动 坐 标 约 束 关 系 。 通 过 基 于 小 变 形 假 设 的 数 值 仿 真计算 , 并 和 简 化 KE D 方 法进 行 比较 , 结果 表 明 系统 刚体 运 动 的科 氏 力 和 离 心 力 以 及 变 换 矩 阵 的 时变 性 对 系统 动 力 学 特 性 有 着 至关 重要 的影 响 。 关键词 : 并 联 机 器 人 ;弹性 动 力 学 ;刚一 弹耦合 ; KE D方 法 中图 分 类 号 : THu 3 . 1 文献标识码 : A 文 章 编 号 :1 0 0 4 — 4 5 2 3 ( 2 0 1 3 ) 0 2 — 0 2 3 9 - 0 7
3R3T六自由度绳牵引并联机构系统分析与运动控制的开题报告

3R3T六自由度绳牵引并联机构系统分析与运动控制的开题
报告
本文将对3R3T六自由度绳牵引并联机构系统的运动学分析、动力学分析和运动控制进行讨论。
1. 研究背景
六自由度机器人广泛应用于工业生产和科学研究领域,然而传统的六自由度机器人在运动灵活性、工作范围、精度和可靠性等方面存在限制。
相比之下,基于绳牵引并联机构的六自由度机器人能够提供更大的工作范围和可靠性,因此逐渐成为研究的焦点之一。
2. 研究目的
本文旨在对3R3T六自由度绳牵引并联机构系统的运动学特性、动力学特性以及运动控制进行深入研究,为机器人的设计和应用提供理论依据和实用经验。
3. 研究方法
3.1 运动学分析
首先,对3R3T六自由度绳牵引并联机构系统进行运动学分析,推导出机构的运动学反解和正解方程,并利用MATLAB软件进行模拟分析,分析机构的运动学特性。
3.2 动力学分析
在运动学分析的基础上,进一步进行动力学分析,推导出机构的动力学模型和动力学特性,进行模拟分析和实验验证。
3.3 运动控制
最后,针对机构特点和运动学和动力学模型,设计出运动控制策略,并结合实际控制系统进行控制效果的分析和评估。
4. 研究意义
通过对3R3T六自由度绳牵引并联机构系统进行深入的运动学分析、动力学分析和运动控制研究,可以对其设计和应用提供理论支持和实用经验,同时也拓展了六自由度机器人研究的新思路。
该研究对于提高机器人的工作范围、精度和可靠性,应用于生产制造、医疗保健、环境监测等领域具有积极意义。
基于ANSYS的3-RRR柔顺并联机构的特性分析
基于ANSYS的3-RRR柔顺并联机构的特性分析摘要:为了研究3-RRR柔顺并联机构的性能,分别对其刚度、运动学、温度影响分析、模态分析和谐响应分析。
采用有限元软件ANSYS 对其特性进行比较分析,分析结果可得如下结论:机构能实现3个自由度运动,并且各个输入端对输出位移的影响不同;温度对机构的输出位移有较大影响,而且温度对其输出位移的关系是线性的;从机构的前3阶振型可知,机构能实现3自由度运动;从谐响应分析结果可知,输出位移都是在接近于固有频率的地方有最大值,但不同输入端在不同频率段对各个方向位移作用不同。
论文关键词:3-RRR,柔顺并联机构,温度影响,谐响应分析,模态分析近年来,面向生物工程、医学工程以及微加工等领域的微操作机器人技术受到国内外的广泛关注[1-3],发展速度极快,已被应用于实现细胞的注射和分割,微机电产品的加工和装配和微外科手术等领域,为此,要求微操作机器人具有无摩擦、无间隙、响应快、结构紧凑、刚性好以及误差积累小等特点。
柔顺并联机构作为微操作机器人机构,可以充分发挥其自身特点:机构紧凑、重量轻、刚性好、工作空间不大、运动精度高,在三维空间的微小运动精度可以达到亚微米甚至是纳米的分辨率。
柔顺并联机构在微操作机器人领域中有着广阔应用前景[4-7]。
本文采用有限元法对3-RRR柔顺并联机构的静态和动态性能进行分析,以认识其性能特征。
2 3-RRR柔顺并联机构3-RRR平面柔顺并联机构示意图如图1所示,它是由3个RRR运动支链组成,各个运动关节为柔性铰链,可以实现动平台和方向的平动及绕轴的转动。
驱动端为压电陶瓷驱动器作用位置。
对于柔顺并联机构而言,柔性铰链的选择与设计是整个机构设计的关键。
采用正圆形柔性铰链作为机构的运动副,其结构尺寸如图2所示,mm、mm、mm。
由于柔顺机构依靠材料的弹性变形产生运动,这种变形的大小受到材料许用应力的限制,而许用应力的大小又直接与材料的疲劳强度有关,则材料需要有较长的疲劳寿命才可能正常地执行其功能。
3-RRC并联柔性机器人的动力学分析
摘 要 :基于 Br ui El 梁理论、 e ol — u r n l e 有限元原理、E K D方法和Lg ne ar g 方程, a 建立了3 R C并联柔性机器人的 一R
弹性动力学方程。在此基 础上 , 利用 N w ak积分方法对其动力学方程 进行 了求解 , em r 分析 了 3一R C并联柔性 机器人 的 R
维普资讯 Biblioteka 振 第 2 第 2期 7卷
动
与
冲
击
J OURNAL OF VI RATI B ON AND HOCK S
3一RRC并 联 柔性 机器 人 的动 力学分 析
刘善增 , 余跃 庆 , 杨建新 , 苏丽颖
( 京工业大学 北 机 电学 院 , 京 北 10 2 ) 0 0 2
P R并 联机 构 的动 力 学模 型 , 析 了 动平 台 的 响应 R 分
和连杆末 端 的振 动 。PrsG 利用 有 限元 理论 与 K D i a E 分 析方法 研究 了 3一P R平 面 并联 机 器 人 的 固有 频 率 R
等问题。蔡胜利 、 杜兆才、 余跃 庆等H 对 3 R 一R R柔 性 并联机 器 人 的 动力 学 问题 进 行 了深 入 分 析 。黄 真 , 方跃 法 应用 弹性 系统 的虚 功 原 理 , 出 了计 算 并 联 提 机 器人操 作器 弹性位 姿误 差 的虚 功 方 法 。罗继 曼 等 采用 有 限单元 法建 立 了新 型 3一T S并 联 机 器 人 的弹 P 性 动力学方 程 , 过 实 例 分 析 了机 构第 一 阶 固有 频 率 通
由度 R S并联 机器人 的运 动学 和动 力学 问题 进 行 了研 T 究 。WagXay n等 建 立 了含 有柔 性 杆 件 的平 面 3 n i u o
3_RRS柔性并联机器人的动力学建模与频率特性分析_刘善增

1
动力学建模
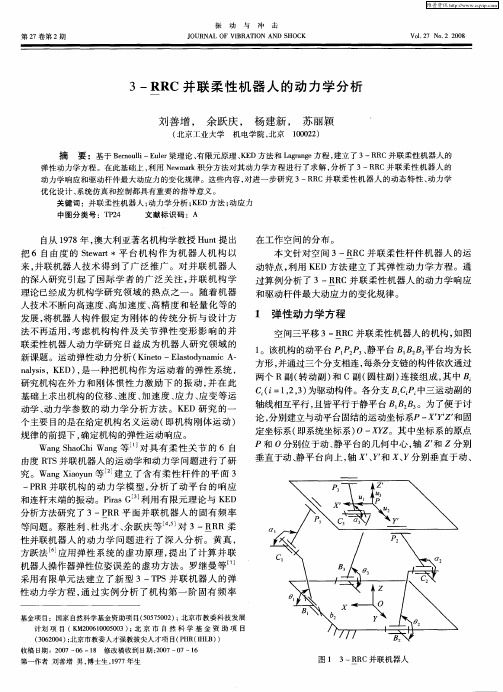
3 -RRS 柔 性并联机 器人 的结构 如图 1 所
示 。 静( 下) 平台和动( 上) 平台通过 3 条支链相 · 1219 ·
中国机械工程第 19 卷第 10 期 2008 年 5 月下半月
连 , 设其上下平台均为等边三角形 , 上平台通过球 面副( S 副) 与各连杆连接 , 下平台则通过转动副 ( R 副) 与各连杆连接 , 其中 B i ( i =1 , 2 , 3) 处转动 副的轴线与 Ci 处转动副的轴线对应平行 。 分别建 立与动平台固结的局部坐标系 O P X ′ Y′ Z′ 和系统 ( 固定) 坐标系 OX Y Z 。 坐标系原点 O P 和O 分别位 于上下平台的几何中心 , 轴 Z′ 和 Z 分别垂直于上 下平台 , 轴 X′ 、 Y′ 与X 、 Y 分别平行和垂直于上下 平台的边 P 2 P 3 与 B 2 B 3 。 局部定坐标系B i x′ i1 y′ i1 z′ i1
向) 变 形 和 扭 转 变 形 。 单 元 广 义 坐 标 设 为 δ∈ R18×1 , 它表示单元端点的弹性位 移 、转角和 曲率 , 如图 2 所示 。 这样单元上任意一点相对于单 元坐标系将产生沿轴 x 、 y、 z 的弹性位移 W x ( x, t) 、W y ( x , t) 、 Wz ( x , t) 绕轴 x 、y 、z 的弹性角位移
[ 1-8]
的响应和 连杆末端的振动 。 Pi ras[ 4] 利用有限元 理论与运动弹性动力分析方法 , 研究了具有柔性 杆的 3 -P RR 平面并联机器人的动力学问题 , 分 析了机构位形 、 几何刚度和动力学项对弹性振动 的影响 , 并给出了第一阶模态固有频率随机器人 位形变化的曲线 。 然而 , 针对空间柔性杆件并联 机器人的 动力学建模和 分析的研究还 较少
平面3-PRR非对称并联机构动力学分析
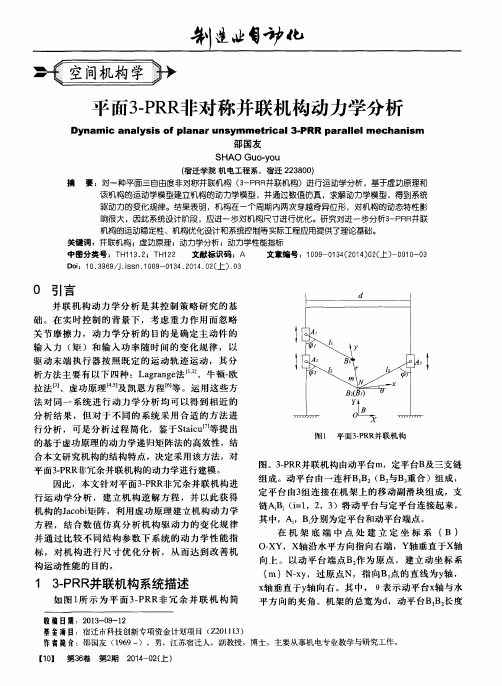
图l 平面3 一 P R R并联机构
图。3 - P R R 并 联机 构 由动 平 台m,定平 台B 及三 支链
组 成 。动 平 台 由一连 杆B因此 ,本 文 针对 平面 3 一 P RR t B 冗余 并联 机构 进
行运 动 学分 析 ,建 立 机 构 逆 解 方 程 ,并 以此 获 得 机构 的J a c o b i 矩 阵 ,利用 虚功 原 理建 立 机构 动 力学 方 程 , 结 合 数 值仿 真 分 析机 构 驱动 力 的变 化 规 律 并通 过 比 较 不 同 结构 参 数 下 系统 的动 力学 性 能 指 标 ,对 机 构 进 行 尺寸 优 化 分析 ,从 而达 到 改善 机 构运 动性 能 的 目的 。
( 宿迁 学院 机 电工程系 ,宿迁 2 2 3 8 0 0 )
摘 要 :对一种平面 三自由度非对称并 联机 构 ( 3 一 P R R 并联机构)进行运动 学分 析 ,基于虚功原理 和 该机构的运动学模型建立机构的动力学模型 , 并通过数值仿真,求解动力学模型 ,得到系统
驱动力的变化规律。结果表明,机构在一个周期内两次穿越奇异位形 ,对机构的动态特性影 响很大 ,因此系统设 计阶段 ,应进 一步对机 构尺 寸进行优化 。研究对进 一步分析3 - P R R 并联 机构的运动稳定性 、机构优化设计和 系统控制等实 际工程应用提供 了理论基础 。
1 3 一 P RR 并联机构 系统描述
如图l 所 示为平 面3 一 P RRz ]  ̄ 冗 余 并 联 机 构 简
收稿 日期:2 0 1 3 -0 9 -1 2 基金项 目:宿迁市科技创新专项资 金计 划项 目 ( Z 2 0 1 1 1 3 ) 作 者简介:邵 国友 ( 1 9 6 9一 ) ,男 ,江苏宿迁人 ,副教授 ,博士 ,主要从事机电专业教学与研究工作 。
基于拓扑优化的3-PRPR全柔性并联机构设计及分析

基于拓扑优化的3-PRPR全柔性并联机构设计及分析董博;王雪【摘要】全柔性并联机构具有分辨率高、运动灵活、动态特性好等优点,但其构型设计往往不能满足微定位和精密加工制造领域的需求.基于并联机构原型,以几何约束为条件,设计出与并联机构原型空间运动特性一致的3-PRPR全柔性并联机构.利用Hyperworks软件行拓扑优化,设计出优化后的3-PRPR全柔性并联机构.分别对这两种3-PRPR全柔性并联机构进行有限元及模态分析,仿真结果表明:在实现相同运动特性的前提下,优化后的3-PRPR全柔性并联机构不仅节省材料,而且在刚度和抗振性方面更优于优化前的机构.【期刊名称】《机械设计与制造》【年(卷),期】2016(000)010【总页数】4页(P170-173)【关键词】全柔性并联机构;拓扑优化;Hyperworks;有限元分析;模态分析【作者】董博;王雪【作者单位】辽宁大学计算中心,辽宁沈阳110036;辽宁大学信息化中心,辽宁沈阳110036【正文语种】中文【中图分类】TH16;TH112基于全柔性并联机构的微操作平台可以实现毫米级甚至微米级的微定位,在生物工程、集成电路制造、光学微处理、航空航天等微领域得到了广泛地应用。
随着微观领域技术的不断拓展,人们进入了“亚微米-纳米”时代,对微操作平台的性能提出了更高的要求,因此设计出一种新型的操作行程大、动态响应速度快和运动精度高的微操作平台具有重要意义[1]。
机构的“型”是微操作平台构型分析与研究的理论基础,也是提高其刚度和定位精度的重要途径[2]。
构型分析的主要目的是机构在某种特定条件下实现运动特性时最合理的应力分布情况,从而设计出精密定位最优的机构构型。
为克服空间全柔性并联机构构型设计的缺陷,将柔性铰链和机构构型集成在一块整体材料上,采用线切割加工方式得到全柔性并联机构支链及其构型,但该方法仍未解决柔性铰链在整体材料上的配置问题[3]。
拓扑优化方法[4]能够在保持机构原有特性的基础上,在一定的约束条件下删除一些不必要的单元,该方法只需规定好原始的设计区域,明确机构的约束位置以及驱动力的加载位置,其会根据受力情况在设计空间内自动寻找出最佳的应力应变分布形式,避免了设计全柔性机构铰链的随机性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D y n a mi c s A n a l y s i s o f 3 P R RC o mp l i a n t P a r a l l e l Me c h a n i s m
J i aX i a o h u i T i a nY a n l i n g Z h a n gD a w e i
2010年 1 0月 D OI : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 0 1 2 9 8 . 2 0 1 0 . 1 0 . 0 4 1
农 业 机 械 学 报
第 4 1卷 第 1 0期
3 P R R柔性并联机构动力学分析
贾晓辉 田延岭 张大卫
( 天津大学机械工程学院,天津 3 0 0 0 7 2 )
【 摘要】 提出一种可应用于微 / 纳操作 领 域 的 3 P R R 柔 性 并 联 机 构, 基于 E u l e r B e r n o u l l i 梁 理 论, 采用假设 模态法, 分析支链上从动杆的柔性, 结合实例说明了 将 从 动 杆 视 为 刚 性 杆 处 理 的 依 据。 为 进 一 步 分 析 各 构 件 惯 量 参数和柔性构件刚度对系统固有频率的影响, 采用拉 格 朗 日 方 程 建 立 了 修 正 的 机 构 动 力 学 振 动 微 分 方 程, 并结合 实例进行分析, 利用仿真计算验证了所建模型的有效性。 关键词:柔性并联机构 自由振动 动力学分析 拉格朗日方程 中图分类号:T H 1 1 3 文献标识码:A 文章编号:1 0 0 0 1 2 9 8 ( 2 0 1 0 ) 1 0 0 1 9 9 0 5
3
V k =∑
3
i =1
1 0 2 k ( )+ θ θ i- i 2
3
∑
i =1
1 1 2 2 k ( ) +∑ k q Δ γ+Δ θ Δ i 1 i 2 i = 1 2
( 4 )
式中 k — — —从动杆上柔性铰链转动刚度 k — — —驱动处柔性环节等效刚度 1
0 — — —位置角初始值 θ i
2 I r 4 p= m p b/
( 2 )
式中 mp— — —动平台质量 v 、 v — — —动平台沿 x 、 y 方向的平动速度 x y — — —动平台在 x O y 面内的角速度 ω I — — —动平台转动惯量 p 从动杆动能为
3
此种形式。 为了 保 证 工 作 过 程 中 的 运 动 精 度, 该柔性机构 采用线切割技术整体加工工艺, 不需要装配、 调整等 手段, 从而可以有效提高加工制造精度和定位精度。 另外整体加工方式 以 及 对 称 的 结 构 形 式, 可以有效 消除工作过程中热变形的影响。 x y , x轴 平 行 于 在基座 中 心 O 建 立 基 坐 标 系 O 动平 台 边 C ′ x ′ y ′ 位于 1C 3的 初 始 位 置。 动 坐 标 系 O 动平 台 中 心 O ′ , 机构的基座和动平台半径分别为 r 、 r , 主动臂 A B 长度为 q , 从动杆 B C 长度为 l , a b i i i i i e 为主动臂单 位 方 向 矢 量, w 为从动臂单位方向矢 i i 量, 位置角为 θ 。点 A 在基坐标系 O x y中 的 位 置 角 i i , 且有 α 2 ( i - 1 ) 3 。点 C 在动 坐标 系 为α α / i i= 1+ i O ′ x ′ y ′ 中的位置 角为 β , 且有 β 2 ( i - 1 ) 3 , β / i i= 1+ O y 面内的转角为 γ , 其中 i = 1 , 2 , 3 。 动平台在 x
2 0 0
农 业 机 械 学 报 2010年
1 3 P R R 柔性并联机构
如图 1所 示, 3 P R R柔 性 并 联 机 构 包 括 动 平 台、 基座和 3个 沿 圆 周 均 匀 分 布 的 运 动 支 链。 每 个 支链上的移动铰链与基座固连且由压电陶瓷驱动器 驱动, 驱动点设计为左右对称的平行板簧形式, 以保 证驱动器 伸 长 ( 压缩) 过 程 中 的 定 位。 在 多 种 截 面 形式的柔性铰链中, 圆形凹槽柔性铰链的变形精度
— — —动平台 x O y 面内转角变化量 Δ γ
图1 3 P R R柔性并联机构及其坐标系示意图 F i g . 1 A r c h i t e c t u r ea n dc o o r d i n a t es y s t e mo f 3 P R R c o m p l i a n t p a r a l l e l m e c h a n i s m
2 从动杆柔性分析
基于 E u l e r B e r n o u l l i 梁 假 设, 采 用 假 设 模 态 法, 第i 个从 动 杆 中 线 上 任 意 一 点 的 柔 性 变 形 可 表 示
1 . 单自由度柔性铰链 2 . 从动杆 3 . 压电陶瓷驱动器 4 . 板簧
柔性杆变形势能为
r
V l= ∑
i =1
l 1 E I 2 0
( ∫
2 ( s ) Wi 2 s
)
2
d s
( 5 )
式中 E — — —从动杆弹性模量 I — — —从动杆惯性矩 将式( 1 )~( 5 ) 代入拉格朗日方程, 得 d ( K-V ) ( K-V ) - =Q i · d t η i j η i j
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g ,T i a n j i nU n i v e r s i t y ,T i a n j i n3 0 0 0 7 2 ,C h i n a )
A b s t r a c t A 3 P R R c o m p l i a n tp a r a l l e lm e c h a n i s m u t i l i z i n g f l e x u r e j o i n t sw a sp r o p o s e d f o r3 D n a n o m a n i p u l a t i o n .B a s e do nt h ea s s u m e dm o d em e t h o d ,t h ep a s s i v el i n kw a s m o d e l e da s E u l e r B e r n o u l l i b e a m s w i t hp i n n e d p i n n e db o u n d a r yc o n d i t i o n st os h o wt h er e a s o no f t h er i g i de q u i v a l e n t .I no r d e rt o a n a l y z et h ee f f e c t so ft h ei n e r t i ap a r a m e t e r so fm o b i l ep l a t f o r ma n dp a s s i v el i n k ,a n dt h es t i f f n e s so f f l e x u r ep a r t s o nt h en a t u r a l f r e q u e n c yo f 3 P R Rc o m p l i a n t p a r a l l e l m e c h a n i s m ,t h em o d i f i e dd y n a m i c s m o d e l o f t h e3 P R Rf l e x u r e b a s e dp a r a l l e l m e c h a n i s mw a s o b t a i n e db yt h eL a g r a n g e s f o r m u l a t i o n .T h e n u m e r i c a l s i m u l a t i o n s w e r ec a r r i e do u t t ov a l i d a t et h ee s t a b l i s h e dm o d e l . Ke yw o r d s C o m p l i a n tp a r a l l e lm e c h a n i s m ,F r e ev i b r a t i o n ,D y n a m i c sa n a l y s i s ,L a g r a n g e s f o r m u l a t i o n 模型理论对柔性体 进 行 分 析 时, 常常直接将部分中 间连杆视为刚性体 处 理, 而相应的等效依据却少有 研究。拉格朗日方程法从系统的动势能角度建立机 构动力学方程, 不需要复杂的运动学加速度、 角加速 度分析, 推导过程简便, 且能得到形式简洁的动力学 方程, 便于进一步动力学分析及研究。 本文 基 于 E u l e r B e r n o u l l i 梁 理 论, 采用假设模 态法, 分析各支链上连杆的柔性, 并基于拉格朗日方 程建立修 正 后 的 机 构 振 动 微 分 方 程。 通 过 仿 真 算 例, 说明动平台和从 动 杆 的 惯 量 参 数 ( 质 量、 转动惯 量) 及柔性构件刚度在此柔性并联机构中的作用。
4 ] , 因此各支链 从 动 杆 两 端 的 柔 性 铰 链 均 采 用 最高 [
由于动平台具有沿 x 、 y 方向的 2个 平 动 自由 度 以及 1个在 x O y 面内 的 转 动 自 由 度, 因此其具有的 动能表示为 1 2 1 2 1 2 K m v+ m v+ I ω p= 2 px 2 py 2p 其中
[ 1~2 ]
。 , 关于机构惯 性 参 数 及 柔 性 环 节 刚 度 对 动 力
目 前, 柔性并联机构的理论和实验研究还很不 成熟
[ 3 ]
学特性影响的研 究 更 为 少 见。 另 外, 在利用伪刚体