二级倒立摆的建模与MATLAB仿真毕业论文
MATLAB的二级倒立摆虚拟仿真

MATLAB的二级倒立摆虚拟仿真徐秀芬;梁中丽【期刊名称】《新乡学院学报(自然科学版)》【年(卷),期】2013(000)004【摘要】Based on the analysis of components of double inverted pendulum structure, mathematical model of inverted pendulum is establish based on the Newton’s second law, and controlling double inverted pendulum structure is realized by LQR state feedback control method. Simulation results of MATLAB show that modeling LQR controller makes the tilt angle of inverted pendulum maintaining stability in vertical area;even if the vehicle displacement changes abrupt the angle can return to expected location. And it has preferable track and control effect and robustness.%在对二级倒立摆结构分析的基础上,基于牛顿第二定律建立倒立摆数学模型,并应用LQR状态反馈控制方法实现二级倒立摆控制。
MATLAB仿真结果表明:LQR控制器能使倒立摆的摆角在竖直向上的区域内保持稳定,即使突然变化小车位移,摆角也能回复到预期的位置,具有较好的跟踪和控制效果、鲁棒性。
【总页数】3页(P286-288)【作者】徐秀芬;梁中丽【作者单位】新乡学院机电工程学院,河南新乡,453003;新乡学院机电工程学院,河南新乡,453003【正文语种】中文【中图分类】TP273【相关文献】1.基于MATLAB的二级倒立摆控制系统设计方法 [J], 钱伟康;方宗达2.基于MATLAB的二级倒立摆的稳摆控制研究 [J], 马杰;张景钰3.基于MATLAB的二级倒立摆的稳摆控制研究 [J], 马杰;张景钰4.MATLAB的二级倒立摆虚拟仿真 [J], 徐秀芬;梁中丽5.二级倒立摆的建模与MATLAB仿真 [J], 刘文斌;干树川因版权原因,仅展示原文概要,查看原文内容请购买。
二级倒立摆的建模与MATLAB仿真

二级倒立摆的建模与 MATLAB 仿真 刘文斌,等
二级倒立摆的建模与MATLAB仿真
刘文斌,干树川 (四川理工学院电子与信息工程系 四川自贡,643000)
取为最小值。设控制输入函数形式为: U(t)= -Kx(t) (11) 状态反馈矩阵: K = R -1B T P ( 12) 其中,P 可由 Riccati 微分方程: (13) 其中, 性能指标函数: (14)
[J].计算机测量与控制,2006,14(12):1641 - 1642 5 张 春,江 明,陈其工等.平行单级双倒立摆系统的建模与滑
模变结构控制[J].2008.1
23
图1 二级倒立摆模型
(1)
(2)
(3) 经过线性化如下: (4)
(上接第 7 页) 0; 0; 0; 0]; p=eig(A) [num,den]=ss2tf(A,B,C,D,1); printsys(num,den) Q=[1000 0 0 0 0 0; 0 0 0 0 0 0; 0 0 10 0 0 0; 0 0 0 0 0 0; 0 0 0 0 10 0; 0 0 0 0 0 0]; Tc=ctrb(A,B); rank(Tc) To=obsv(A,C); rank(To) R=1; K=lqr(A,B,Q,R); Ac=[(A-B*K)]; Bc=[B]; Cc=[C]; Dc=[D]; T=0:0.005:20; U=0.2*ones(size(T)); [Y,X]=lsim(Ac,Bc,Cc,Dc,U,T); plot(T,Y(:,1),':',T,Y(:,2),' -',T,Y(:,3),'
matlab仿真毕设--倒立摆现代控制理论研究
内蒙古科技大学本科生毕业设计说明书(毕业论文)题目:倒立摆现代控制理论研究倒立摆现代控制理论研究摘要倒立摆系统是一个复杂的非线性、强耦合、多变量和自不稳定系统。
在控制工程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪性等许多控制中的关键问题,是检验各种控制方法的理想工具。
理论是工程的先导,它对倒立摆系统的控制研究具有重要的工程背景,单级倒立摆与火箭的飞行有关,二级倒立摆与双足机器人的行走有相似性,日常生活中的任何重心在上,支点在下的问题都与倒立摆的控制有极大的相似性,所以对倒立摆的稳定控制有重大的现实意义。
迄今,人们已经利用古典控制理论、现代控制理论及多重智能控制理论实现了多种倒立摆系统的稳定控制[5]。
倒立摆的控制方法有很多,如状态反馈控制,经典PID控制,神经网络控制,遗传算法控制,自适应控制,模糊控制等。
其控制方法已经在军工、航天、机器人和一般工业过程等领域得到了应用。
因此对倒立摆系统的控制研究具有重要的理论和现实意义,成为控制领域中经久不衰的研究课题。
本文是应用线性系统理论中的极点配置、线性二次型最优(LQR)和状态观测器等知识,设计了倒立摆系统线性化模型的控制器,通过MA TLAB仿真,研究其正确性和有效性。
通过分析仿真结果,我们知道了,状态反馈控制可以使倒立摆系统很好的控制在稳定状态,并具有良好的鲁棒性。
关键词:倒立摆;现代控制;Matlab仿真;Modern Control Theory Of Inverted PendulumAbstractInverted pendulum system is a complex nonlinear and strongly coupled,multi-variable and unstable system since.In control engineering,it can effectively reflect such stabilization,robustness,with the mobility of control and tracking,and many other key issue,It is the test ideal for a variety of control methods.Theory is the project leader,inverted pendulum control system also has important engineering research background,inverted pendulum with single-stage related torocket for the flight,Inverted pendulum and biped walking robot similar nature in any life in the center of gravity,the fulcrum in the next issue with the inverted pendulum control has a great similarity,so the stability control of inverted pendulum significant practical significance.So far,it has been the use of classical control theory,modern control theory and control theory of multiple intelligence to achieve a variety of inverted pendulum system stability control[5].Inverted pendulum control methods there are many,such as the state feedback control,the classic PID control,neural network control,genetic algorithm control,adaptive control,fuzzy control.The control method has been in military,aerospace,robotics and general industrial processes and other areas have been intended use.Therefore,the control of inverted pendulum system research has important theoretical and practical significance,of becoming enduring research topics in the field.This is the application of the theory of linear systems pole placement,linear quadratic optimal (LQR) and the state observer of such knowledge,the design of the linear inverted pendulum model of the controller,through simulation to study the correctness and effective sex.By analyzing the results of MATLAB simulation,state feedback control can make a goodcontrol of inverted pendulum system in a stable state,and has good robustness,stability control features.Key words: Inverted pendulum;Modern control;Matlab simulation;目录摘要 (I)Abstract (II)第一章绪论 (1)1.1倒立摆系统模型简介 (1)1.2倒立摆研究的背景与意义 (2)1.3国内外研究现状、水平和发展趋势 (3)1.3.1倒立摆和控制理论的发展 (3)1.3.2倒立摆的控制方法 (4)1.3.3倒立摆的发展趋势 (5)1.4本论文的主要工作介绍 (6)第二章一级倒立摆的数学模型建立及其性能分析 (7)2.1 系统的组成 (7)2.2 一级倒立摆数学模型的建立 (8)2.2.1 数学模型的建立 (8)2.2.2 系统的结构参数 (9)2.2.3 用牛顿力学方法来建立系统的数学模型 (9)2.2.4 一级倒立摆的性能分析[7] (13)2.3 本章小结 (15)第三章现代控制理论在倒立摆控制中的应用 (16)3.1 自动控制理论的发展历程 (16)3.2 经典控制理论 (18)3.2.1 PID控制现状 (18)3.2.2 PID控制的基本原理 (18)3.2.3 常用PID数字控制系统 (20)3.3 现代控制理论 (21)3.3.1 极点配置[11] (22)3.3.2 线性二次型最优的控制理论[7,8] (24)3.3.3 加权矩阵的选取 (26)3.3.4 状态观测器[7] (26)3.4 本章小结 (29)第四章MA TLAB仿真技术 (30)4.1 仿真软件——Matlab简介 (30)4.1.1 MA TLAB的优势 (30)4.2 Simulink简介 (32)4.3 S-函数简介 (33)4.3.1 用M文件创建S-函数 (34)4.4 倒立摆仿真模块的建立 (36)4.5 本章小结 (37)第五章一级倒立摆线性模型系统的仿真 (38)5.1 倒立摆控制器结构选择 (38)5.2 一级倒立摆线性模型系统仿真 (38)5.2.1 Simulink仿真 (42)5.3 本章小结 (46)结束语 (48)参考文献 (49)附录A (51)致谢 (53)第一章绪论1.1倒立摆系统模型简介倒立摆控制系统是一个复杂的、不稳定的、非线性的系统,是进行控制理论教学及开展各种控制实验的理想实验平台,但它并不是我们想象的那样抽象,其实在我们日常生活中就有很多这样的例子。
直线二级倒立摆的控制问题的研究和matlab仿真说明书本科毕设论文
直线二级倒立摆的控制问题的研究和matlab仿真摘要倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的高阶不稳定系统,它是检验各种新型控制理论和方法有效性的典型装置。
近年来,许多学者对倒立摆系统进行广泛地研究。
本文研究了直线二级倒立摆的控制问题。
首先阐述了倒立摆系统控制的研究发展过程和现状,接着介绍了倒立摆系统的结构并详细推导了二级倒立摆的数学模型。
本文分别用极点配置、LQR最优控制设计了不同的控制器,通过比较和MATLAB仿真,验证了所设计的控制器的有效性、稳定性和抗干扰性。
关键词: 倒立摆;极点配置;最优控制; MATLAB;仿真ABSTRACTInverted pendulum is a typical multi-variable, non-linear, strong coupling and rapid movement of high-end system instability, It is testing various new control theory and methods of the effectiveness of the typical devices. In recent years, many scholars of the inverted pendulum extensive study.In this paper, a straight two inverted pendulum control problem.First on the inverted pendulum control of the development process and the status quo, then introduced the inverted pendulum system and the detailed structure of the two inverted pendulum is derived a mathematical model. In this paper, with pole placement, LQR optimal control design a different controller, By comparing and MATLAB simulation, verified the effectiveness ,stability and anti-jamming of the controller.Key words:Inverted pendulum;Pole Assignment;Optimal Control;MATLAB;Simulation目录摘要 (1)ABSTRACT (2)第一章绪论 (5)1.1 控制理论的发展 (5)1.2 倒立摆系统简介及其研究意义 (5)1.3 倒立摆研究的发展现状及其主要控制方法 (7)1.4 本人所做工作 (8)第二章直线二级倒立摆数学模型的建立 (10)2.1 倒立摆系统的物理结构及特性分析 (10)2.2 系统的数学建模 (11)2.2.1 两种数学建模方法的比较 (11)2.2.2 系统数学建模参数的设定 (12)2.2.3 直线二级倒立摆的拉格朗日方程建模 (13)2.2.4 二级倒立摆系统数学模型的线性化 (17)2.3 系统参数的设定 (19)2.4 倒立摆系统的初步运动分析 (20)第三章直线二级倒立摆控制方案的设计 (22)3.1极点配置控制方案的设计 (22)3.1.1 极点配置理论 (22)3.1.2 极点配置算法 (23)3.2 线性二次型最优控制(LQR)方案的设计 (24)3.2.1 线性二次型最优控制原理 (24)3.2.2 Q, R阵的选择 (26)第四章控制系统的MATLAB仿真 (27)4.1 仿真软件的介绍 (27)4.1.1 MATLAB简介 (27)4.1.2 MATLAB7.0简介 (28)4.1.3 Simulink 6.0仿真工具箱简介 (29)4.2 无干扰控制系统的仿真 (30)4.2.1 极点配置控制方案的仿真 (32)4.2.2 线性二次型最优控制(LQR)方案的仿真 (36)4.3 干扰条件下控制系统的仿真 (40)4.3.1 极点配置控制方案的仿真 (42)4.3.2 线性二次型最优控制(LQR)方案的仿真 (45)结论 (50)致谢 (52)参考文献 (53)第一章绪论1.1 控制理论的发展控制理论发展至今已有100多年的历史,随着现代科学技术的发展,它的应用也越来越广泛。
直线二级倒立摆建模与matlab仿真LQR
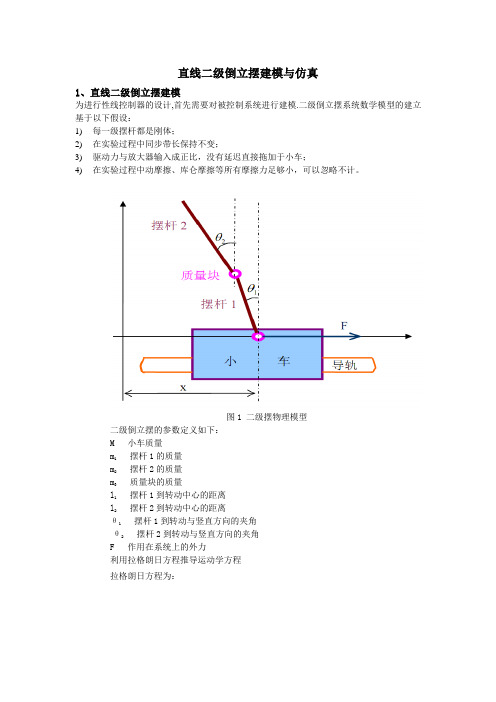
直线二级倒立摆建模与仿真1、直线二级倒立摆建模为进行性线控制器的设计,首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立基于以下假设:1)每一级摆杆都是刚体;2)在实验过程中同步带长保持不变;3)驱动力与放大器输入成正比,没有延迟直接拖加于小车;4)在实验过程中动摩擦、库仑摩擦等所有摩擦力足够小,可以忽略不计。
图1 二级摆物理模型二级倒立摆的参数定义如下:M 小车质量m1摆杆1的质量m2摆杆2的质量m3质量块的质量l1摆杆1到转动中心的距离l2摆杆2到转动中心的距离θ1摆杆1到转动与竖直方向的夹角θ2摆杆2到转动与竖直方向的夹角F 作用在系统上的外力利用拉格朗日方程推导运动学方程拉格朗日方程为:其中L 为拉格朗日算子,q 为系统的广义坐标,T 为系统的动能,V 为系统的势能其中错误!未找到引用源。
,错误!未找到引用源。
为系统在第i 个广义坐标上的外力,在二级倒立摆系统中,系统有三个广义坐标,分别为x,θ1,θ2,θ3。
首先计算系统的动能:其中错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
分别为小车的动能,摆杆1的动能,摆杆2的动能和质量块的动能。
小车的动能:错误!未找到引用源。
,其中错误!未找到引用源。
,错误!未找到引用源。
分别为摆杆1的平动动能和转动动能。
错误!未找到引用源。
,其中错误!未找到引用源。
,错误!未找到引用源。
分别为摆杆2的平动动能和转动动能。
对于系统,设以下变量: xpend1摆杆1质心横坐标 xpend2摆杆2质心横坐标 yangle1摆杆1质心纵坐标 yangle2摆杆2质心纵坐标 xmass 质量块质心横坐标 ymass 质量块质心纵坐标 又有:(,)(,)(,)L q q T q q V q q =-则有:系统总动能:系统总势能:则有:求解状态方程:可解得:使用MATLAB对得到的系统进行阶跃响应分析,执行命令:A=[0 0 0 1 0 0;0 0 0 0 1 0;0 0 0 0 1 01;0 0 0 0 0 0;0 86.69 -21.62 0 0 0;0 -40.31 39.45 0 0 0];B=[0;0;0;1;6.64;-0.808];C=[1 0 0 0 0 0;0 1 0 0 0 0;0 0 1 0 0 0];D=[0;0;0];sys=ss(A,B,C,D);t=0:0.001:5;step(sys,t)求取系统的单位阶跃响应曲线:图2 二级摆阶跃响应曲线由图示可知系统小车位置、摆杆1角度和摆杆2角度均发散,需要设计控制器以满足期望要求。
毕业设计 二级倒立摆建模

四川理工学院毕业设计(论文)二级倒立摆系统建模与仿真学生:学号:专业:自动化班级:自动化指导教师:四川理工学院自动化与电子信息学院二O一一年六月摘要常规的PID控制从理论上可以控制二级倒立摆,但在实际中对PID控制器参数的整定为一难点。
本文针对二级倒立摆系统单输入三输出的不稳定系统,通过三回路PID 控制方案,来完成对倒立摆的控制。
利用状态反馈极点配置的方法来对参数进行整定,解决PID参数整定的难点。
然后借助于MATLAB中的Simulink模块对所得的参数进行仿真,结果表明三回路PID控制是成功的,参数的有效性,也证实了这种参数整定方法简单实用。
并通过配置不同位置的极点,对其结果进行分析得到极点配置的最佳配置方案。
关键词:倒立摆;PID;状态反馈; MATLABABSTRACTDouble Inverted Pendulum System Modeling and SimulationConventional PID control theory to control the inverted pendulum, but in practice the parameters of PID controller tuning is a difficult. In this paper, double inverted pendulum system, the instability of single-input three-output system, through the three-loop PID control program to complete the inverted pendulum control.Pole placement using state feedback approach to setting the parameters to resolve the difficulties PID parameter tuning. With MATLAB and Simulink in the module parameters obtained from simulation results show that the three-loop PID control is successful, the effectiveness of the parameters, but also confirms this tuning method is simple and practical.Different locations through the pole configuration, the results were too extreme configuration of the best configuration.Key words:pendulum;PID control ;state feedback;MATLAB目录摘要............................................................... ABSTRACT (I)第1章引言 01.1 倒立摆研究的目的及意义 01.2 倒立摆的发展史和研究现状 01.3本文的主要工作 (3)第2章倒立摆的建模 (3)2.1 二级倒立摆的简介及物理模型 (3)2.2 二级倒立摆计算机控制系统结构 (4)2.3 二级倒立摆的数学模型 (5)2.4根据牛顿力学、刚体动力学列写二级倒立摆的数学模型 (6)第3章控制策略的选择 (11)3.1 MATLAB简介 (11)3.2该系统的能控、能观及稳定性的分析 (14)3.2.1系统的能控性 (14)3.2.2系统能观性 (16)3.2.3系统的稳定性 (16)3.3 确定控制策略 (17)3.4 控制器参数整定方法 (17)3.5 通过状态反馈极点配置法来整定参数 (19)第4章计算机仿真及结果分析 (22)4.1 Matlab下Simulink模块简介 (22)4.2 在Simulink下的仿真 (23)4.3对仿真结果的分析 (31)第5章结束语 (32)致谢 (33)参考文献 (34)第1章引言1.1 倒立摆研究的目的及意义在控制理论发展的过程中, 一种理论的正确性及在实际应用中的可行性,往往需要一个典型对象来验证, 并比较各种控制理论之间的优劣, 倒立摆系统就是这样的一个可以将理论应用于实际的理想实验平台。
—倒立摆状态反馈系统的建模及matlab仿真

倒立摆状态反馈系统的建模及matlab仿真课题名称:倒立摆状态反馈系统的建模及matlab仿真学生姓名:谢凯学号:2011330380229班级:电气工程及其自动化2班指导老师:高金凤2013年12月20日倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。
通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。
同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
故其研究意义广泛。
一、倒立摆系统的建模1.系统的物理模型如图1所示,在惯性参考系下,设小车的质量为M,摆杆的质量为m,摆杆长度为l,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为Θ,作用在小车上的水平控制力为f。
这样,整个倒立摆系统就受到重力,水平控制力和摩擦力的3外力的共同作用。
图a一级倒立摆物理模型图b摆杆隔离受力图2.系统的数学模型在系统数学模型中,本文首先假设:(1)摆杆为刚体;(2)忽略摆杆与支点之间的摩擦;(3)忽略小车与导轨之间的摩擦。
然后根据牛顿第二运动定律,求得系统的运动方程为: ()2222sin M d x l d x m f dt dtθ++= (1) ()22sin cos sin d x l ml mgl dtθθθ++= (2) 方程(1),(2)是非线性方程,由于控制的目的是保持倒立摆直立,在施加合适的外力条件下,假定θ很小,接近于零是合理的。
则sin θθ≈,cos 1θ≈.在以上假设条件下,对方程线性化处理后,得到倒立摆系统的数学模型如下:()M m x ml f θ++=&&&& (3) 2ml mlx mgl θθ+=&&&& (4) 3. 系统的状态方程以摆角θ,角速度θ,小车的位移x ,速度x 为状态变量,输出为y 。
二级倒立摆毕业论文

二级直线倒立摆的滑模控制器的设计与仿真摘要直线倒立摆是我国高校控制实验室里的经典设备,对这样一个多变量、高度非线性、强藕合的自然不稳定系统所进行的稳定控制性能研究,既有着重要的理论意义,又有很实际的工程实践指导价值。
滑模变结构控制具有独特的鲁棒性能以及对匹配不确定性和外干扰的完全适应性等特点,本文在掌握滑模变结构控制理论的国内外研究现状的基础上,理论联系实际,将滑模变结构控制理论应用于二级直线倒立摆中,对小车和摆杆进行了稳定控制和实时控制的相关研究。
引入饱和函数对变结构控制器加以改进,结果表明,采用饱和函数的控制律虽能有效地削弱系统抖振,提高了系统的控制品质,但其鲁棒性能不强。
在直线倒立摆控制系统仿真平台上将这两种控制方案编写C-MEX文件S-Function程序,均成功地实现了二级倒立摆系统的变结构实时控制。
分别将指数趋近律的滑模变结构控制、基于饱和函数和连续函数的准滑模变结构控制和模糊趋近律的滑模变结构控制策略应用于二级直线倒立摆系统中。
结果表明,单一的变结构控制器能够对直线倒立摆系统起到稳定控制的作用,但系统会出现强烈的抖振。
即使在此基础上引入饱和函数或连续函数等改进控制器方案,使抖振得到抑制,但系统的控制品质将会有所下降。
而结合模糊控制后的模糊变结构控制策略,不但可以通过削弱抖振改善系统的控制品质,而月还可以维持系统的强鲁棒性。
关键词:变结构控制;抖振;模糊趋近律;倒立摆系统;实时控制Two linear inverted pendulum sliding controller design andsimulationABSTRACThe linear inverted pendulum is a classical equipment of university's control laboratory in our country, research the stability control performance which such as multivariable, highly nonlinear, strong coupling and natural unstable systems, not only has the important theoretical significance, but also has a very practical guidance value to the engineering practice.The sliding mode variable structure control has excellent robustness and complete adaptability to the uncertainties and external disturbance, On the basis of the current research of the developed sliding mode variable structure control theory at home and abroad, linking theory with practice, sliding mode variable structure control theory is presented to double linear inverted pendulum, stability control and real-time control research about the car and the pendulum have done in this paper.The sliding mode variable structure control based on sign function is presented to deal with the single inverted pendulum system, the violent chatting problem have appeared in the simulation results. Introducing saturation function to improve controller, the results show that it can effectively reduce the system chattering and improve the control quality of system based on reaching law of by saturation function, but the robustness isn't strong. On the simulation platform of linear inverted pendulum system,it successfully realized the variable structure real-time control of the single inverted pendulum based on the C一MEX S一Function programs of two control scheme.The double linear inverted pendulum system is balanced by the sliding mode variable structure control based on exponential velocity reaching law,the sliding mode variable structure control based on reaching law of by saturation function and continuous function,and the sliding mode variable structure control based on fuzzy reaching law results show that a single variable structure controller although able to accomplish the stability control the linear pendulum, but the system has strong chattering. Even in this basis through the saturation function and continuous function to improve controller can reduce the chattering, but the quality of control system will bining the fuzzy logic control in variable structure control strategy, not only can through reduce chattering to improve the control quality of system,and still can keep the strong robustness of system.Key words: Variable structure control; Chattering; Fuzzy reaching law;Inverted pendulum system; Real-time control目录摘要 (I)ABSTRACT (II)第1章绪论 (1)1. 1倒立摆控制的研究现状 (1)1.1.1倒立摆的起摆控制研究 (1)1. 1. 2倒立摆的稳定控制研究 (1)1.2变结构控制 (2)1. 2. 1变结构控制理论的起源与研究热点 (2)1.2.2滑模变结构控制理论的应用 (4)1.3课题研究目的及意义 (5)1.4研究的具体内容 (6)1.4.1倒立摆系统变结构控制研究实施的具体方案 (6)1.4.2论文主要内容 (6)第2章滑模变结构控制方法 (8)2.1 滑模变结构控制系统简介 (8)2.1.1滑模变结构控制系统的定义 (8)2.1.2滑动模态的到达条件 (9)2.2 滑模变结构系统的不变性 (9)2.3滑模变结构控制器综合设计方法 (11)2.4抖振的研究 (11)第3章二级直线倒立摆的滑模变结构控制 (14)3.1 二级直线倒立摆系统的硬件组成及工作原理 (14)3.2 二级直线倒立摆系统建模 (15)3.3二级直线倒立摆系统的变结构控制仿真 (17)第4章模糊趋近律的滑模变结构控制研究 (26)4.1模糊控制基础理论 (26)4.1.1模糊控制器的工作原理 (26)4.1.2模糊控制器的设计 (27)4.2模糊滑模变结构控制简介 (30)4.3基于模糊趋近律的二级倒立摆变结构控制 (30)4.3.1趋近律性质分析 (30)4.3.2基于模糊控制律的变结构控制器设计 (31)4.3.3仿真结果及分析 (33)第5 章总结 (36)参考文献 (37)谢辞 (39)第1章绪论1. 1倒立摆控制的研究现状研究倒立摆控制最早始于美国麻省理工学院,那是20世纪50年代,研究者根据火箭发射中的助推器工作原理设计出了一级倒立摆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二级倒立摆的建模与MATLAB仿真摘要:本文根据牛顿力学原理,使用机理建模法对二级倒立摆系统进行了建模与仿真研究。
利用最优化控制理论,研究了线性二次型最优控制器对倒立摆系统进行了有效控制。
基于MATLAB程序的设计、仿真的运行,结果表明,二级倒立摆的数学建模法是切实可行的,而且十分可靠,同时利用LQR 控制器实现了对系统的控制,可以达到系统所需要的稳定性,鲁棒性。
关键词:二次型最优控制;二级倒立摆;MATLAB1 引言倒立摆系统是一个常用的、简单的、典型的可进行控制理论研究的实验平台,很多难以用常规实验研究的控制理论问题,都可以通过倒立摆系统来进行研究从而使这些抽象的控制理论问题,通过该系统可以直观的鲜明的显示出来。
所以倒立摆系统一直是控制领域的热点,并且在这些年来在不断的发展进步对控制理论的研究起到了重要作用。
倒立摆系统是一个典型的不稳定系统,具有多变量、强耦合、非线性等特点。
同时也是仿人类行走机器人和火箭发射飞行的过程调整和直升机飞行等实际运用控制对象的最简模型。
本文建立在牛顿力学定律的基础上,研究对象设置为二级倒立摆,对其进行数学建模,再使用二次型最优控制器(linear quadratic regulator,LQR)可以得到一个最优状态反馈的矩阵K,然后在通过对Q和R两个加权矩阵的严谨选取从而实现对二级倒立摆系统良好的自动控制。
2 二级倒立摆模型建立一个典型的二级倒立摆系统主要由机械部分和电气装置两部分组成。
机械装置的结构主要由小车、摆杆1、摆杆2及连接轴等组成,电气装置的主要结构是功率放大器、电动机、驱动电路、保护电路等。
其系统的结构如图1所示。
实验假设如下:(1)小车、摆杆1、摆杆2的材料性质都是刚体的。
(2)小车的驱动力和放大器的输出直接的,无滞后的作用于小车上。
(3)忽略实验中过程中出现的不可避免的各种摩擦力如库伦摩擦力等。
图1 二级倒立摆控制系统的结构二级倒立摆的参数设定如表1。
表1 二级倒立摆的参数设定M 小车质量kg 2l 摆杆2中心到杆心距离m1m 摆杆1质量 kg F 作用在系统上的外力 1/-ms N2m 摆杆2质量 kg g 重力加速度 m/s 2 3m 质量块质量kg 1l 摆杆1中心到杆心距离m通过拉格朗日定律的利用,建立相应的系统模型:可设小车的总动能为m T ,摆杆1的动能为1m T ,摆杆二的动能为2m T ,质量块的动能为3m T ,可得出系统的总动能为:321m m m m T T T T T +++= (1) 由(1)可得系统的总动能为:[]++-++-+=0cos cos 2(22132cos 21212221122211112111212θθθθθθθ l l x x m x l m x l m x m x M T221m ⎥⎦⎤⎢⎣⎡-++)cos(434421212122222121θθθθθθ l l l l +2321x m -21113cos θθ x l m +112132θ l m (2) 系统的势能为:V =321m m m V V V ++ (3)由(2)可得系统的势能为:=V )cos cos 2(cos 2cos 22112113111θθθθl l g m gl m gl m +++ (4)拉格朗日算子:V T L -= (5) 因为在广义坐标上21θθ可忽略外力的作用,那么即可建立以下的模型方程:211M N =θ , 222M N =θ (6) 因为][)(cos 9121242212232111θθ-+---=m m m m l M (7)[])(cos 4)(391621222212222132122θθ-+++-=l l m l l m m m m M (8) []22121312112221222121211221221312111cos )cos(3cos 4cos 4cos 2)sin(4)sin()cos(6sin )cos(3sin 4sin 4sin 23θθθθθθθθθθθθθθθθθθθθ-+----+--+-+---=x m x m x m x m l m l m g m m gm gm N (9)(10) 根据泰勒公式,在平衡处展开,并利用线性化对方程进行计算可得到以下方程组:⎪⎩⎪⎨⎧++=++=xK K K xK K K 272231222172131121θθθθθθ (11)将公式(6)代入(11)可得:将公式(7)(8) (9) (10)代入(12)可解出:132132112)1234(2)442(3l m m m gm gm gm K ------=[][]9/)(3164)(2223212232122l m m m l m m m m g K ++-++=1321213)1234(29l m m m gm K ---=[][]{}9/)(31643)(3423212232123l m m m l m m m m g K ++-++=132132117)1234(2)42(3l m m m m m m K ------=[][][]9/)(31643/)(34)(2223212232132127l m m m l m m m m m m m K ++-++-++= (13)设变量x x =1,12θ=x ,23θ=x ,x x =4,15θ =x ,26θ =x ,加速度为x u =,代入BU AX X+= ,DU CX Y +=可得输出方程: ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛654321x x xx x x=⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-----09635.2504458.14512.68010000008603.700514.180555.39000100000857.002973.16601.160000010⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛654321x x x x x x +⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-2069.007044.10727.00 (14)=Y ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛3211θθθθx x ⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛100000010000001000000100000010000001⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛654321x x x x x x +⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛000000u (15)3 LQR 算法我们运用线性二次型最优控制器(linear quadratic regulator-LQR)对系统进行控制。
LQR 是能以控制和状态变量为指标的动态系统最优控制方法,在现代控制理论中有非常重要的意义。
(1)若给定系统的状态方程为BU AX X+= ,DU CX Y +=。
(16) (2)用r y 表示系统的期望输出。
(3)定义)()()(t y t y t e r -=为系统的向量误差。
则指标函数为:[]dt t U t R U t Qe t e t Se t e J t T f f f T )()()()(21)()(210+⎰+=(17) 在倒立摆系统中I C =,0=r y ,所以)()()(t e t X t Y -==,而且倒立摆的控制是f t 趋向于无穷大时系统的状态问题,所以指标函数为:dt RU U QX X J TT )(0+⎰=∞ (18)其中KX u =是系统的反馈控制,U B R K T1--=其中P 是系统方程的唯一正定解。
因为在二级倒立摆的系统中,小车的主要被控量是小车的位移和它上下摆的角度,Q 是状态变量的影响力,R 是对U 的加权在试验中我们可选取1=R ,运用MA TLAB 结果分析可证明二级单摆系统是能控,能观的,将表一带入公式(13)可得出系统的状态反馈矩阵为:=K ( )4 仿真分析根据上述分析的二级倒立摆控制系统数学模型和LQR 算法,运用MA TLAB 仿真软件,该系统的控制仿真程序如下: K =[ ];A=[0 1 0 0 0 0; 0 0 0; 0 0 0 1 0 0; 0 0 0; 0 0 0 0 0 1; 0 0 0]; B=[0; ; 0; ; 0; ];C=[1 0 0 0 0 0; 0 1 0 0 0 0; 0 0 1 0 0 0; 0 0 0 1 0 0; 0 0 0 0 1 0; 0 0 0 0 0 1]; D=[0; 0; 0; 0; 0; 0]; p=eig(A);[num,den]=ss2tf(A,B,C,D,1); printsys(num,den)Q=[1000 0 0 0 0 0; 0 0 0 0 0 0; 0 0 10 0 0 0; 0 0 0 0 0 0; 0 0 0 0 10 0; 0 0 0 0 0 0]; Tc=ctrb(A,B); rank(Tc) To=obsv(A,C); rank(To) R=1;K=lqr(A,B,Q,R); Ac=[(A-B*K)]; Bc=[B]; Cc=[C]; Dc=[D];T=0::20;U=*ones(size(T));[Y,X]=lsim(Ac,Bc,Cc,Dc,U,T);plot(T,Y(:,1),':',T,Y(:,2),'-',T,Y(:,3),'--')legend('小车位移',' 下摆角','上摆角')Grid通过MATLAB的仿真,我们可以得到小车位移与上下摆角之间的关系图如图2所示。
图2 小车位移及上下摆角通过图2可以看出小车在受到一个恒定的外力作用时小车的位移变化是一个阶跃的变化然后趋于稳定。
上下摆的运动是一种是上摆杆整体相对位移是比较较小的,小车在运动时带动下摆杆的运动,下摆杆的整体的摆动幅度较大的,于是可以看出在上下两个摆杆之间连接点处下摆杆有明显的相对转动,然后上下摆杆基本一致趋于稳定。
我们可以发现用数学模型的建立可以得到一个良好的控制数值,在进行MATLAB分析选取对系统进行控制,系统可以很好的稳定,在给倒立摆干扰后大概在六秒钟的时候系统趋于稳定恢复到平衡点的位置,由图像可以明显的看到在给定输入后系统剧烈的变化上摆角和下摆角成阶跃式变化在一秒的时候达到最大值然后快速衰减在四秒的时候基本趋于稳定,在六秒的时候系统到达平衡点位置,说明用数学模型和LQR算法还是可以很好的控制系统的。
5 结论实验结果表明:本文从二级倒立摆的实际运用出发对系统的组成结构,工作原理进行分析,希望用机理建模法在牛顿力学的基础之上运用最优控制理论对系统进行良好的控制,经过数学模型的建立运算在利用LQR算法,使用MATLAB软件对系统进行仿真和运算,找到最优的系统控制,使得系统在给一个阶跃输入后系统可以很快的稳定下来,结果证明此次的实验是成功的完成了系统的控制性能好,稳定性高,具有较强的鲁棒性的要求。