针对二级倒立摆的LQR控制系统设计
环型二级倒立摆LQR控制
环型二级倒立摆LQR控制作者:系别:专业:学号:指导教师:日期:二零零六年五月二十日摘要控制理论发展过程中,某一理论的正确性以及实际应用中可行性,往往需要一个按其理论所设计的控制器去控制一个典型对象来验证其控制策略的效果。
倒立摆就是这样一个较为理想的实验装置。
倒立摆本身是一个自然不稳定体,在控制过程中能有效地反映控制中的许多问题。
倒立摆的典型性在于:作为一个装置,其成本低廉,结构简单,便于模拟,数字实现不同方式控制;作为被控对象,又相当复杂,是高阶次、不稳定、非线性、强耦合系统,只有采取行之有效的控制方法方能使之稳定。
本文在环型二级倒立摆系统进行数学建模的基础上得出系统的状态方程, 应用线性二次型最优控制策略, 对环型二级倒立摆进行LQR控制器的设计与MATLAB仿真实验,并给出了相应的实验结果。
关键词: 倒立摆;LQR;最优控制;状态方程AbstractThe inverted pendulum is an ideal equipment, which enables the possibility to validate the validity and the feasibility of some control theories, The inverted pendulum is a natural unstable equipment and can effectively reflects many matters in the control process. The model of the inverted pendulum is: as an equipment, low cost, simple machinery, easy to perform all kinds of controls in simulation and digital; as a controlled object, quite complex, high orders, instability, non-linearity, strong coupling system. We can keep it stable through some control method. Inverted pendulum system is a complicated , nonlinear , unstable system of high order. In the paper, it is discussed how to model the system of double inverted pendulums by using dynamics equation and then to t transform into a control problem of linearitied system. The optimized cont rolling policy with LQR cont roller is established on the MATLAB platform. The relevant experiment is also provided.Keywords: LQR; inverted pendulum; optimal control目录1概述………………………………………………………………………………………………………………41.1当前国内外控制理论发展概述………………………………………………………………………51.2倒立摆系统的历史…………………………………………………………………………………………61.3倒立摆控制系统的发展动向………………………………………………………………………………71.4现代控制在倒立摆系统稳定控制中的应用………………………………………………………………91.5对倒立摆系统研究的意义…………………………………………………………………………………101.6本文的主要工作………………………………………………………………………………………………112环型倒立摆系统数学模型的建立……………………………………………………………………………122.1环型倒立摆的特点………………………………………………………………………………………122.2Lagrange方程的特点……………………………………………………………………………………122.3状态空间模型……………………………………………………………………………………………132.4环型二级倒立摆系统数学模型的建立…………………………………………………………………143线性二次型最优控制器(LQR)的设计……………………………………………………………………213.1线性二次型最优控制理论………………………………………………………………………………213.1.1二次型最优控制理论…………………………………………………………………………………213.1.2加权矩阵的选取………………………………………………………………………………………233.2系统的可控性与可观测性………………………………………………………………………………243.3环型二级倒立摆LQR调节器的设计……………………………………………………………………243.3.1设计要求………………………………………………………………………………………………253.3.2理论分析………………………………………………………………………………………………253.3.3实例分析………………………………………………………………………………………………263.3.4Matlab实现……………………………………………………………………………………………304结束语…………………………………………………………………………………………………………33致谢…………………………………………………………………………………………………………………34参考文献……………………………………………………………………………………………………………35附录…………………………………………………………………………………………………………………361 概述在现代科学技术的许多领域中,自动控制技术起着越来越重要的作用。
二级倒立摆模糊控制设计

目录绪论 (4)1 倒立摆系统的建模 (5)1.1 倒立摆系统的特性分析 (5)1.2 二级倒立摆系统的数学建模 (5)1.2.1 基于牛顿力学的二级倒立摆系统数学模型建立 (7)1.3 二级倒立摆系统数学模型的线性化处理 (7)2 线性二次型最优控制(LQR)的方案设计 (9)2.1 二级倒立摆性能分析 (9)2.1.1 稳定性分析 (9)2.1.2 能控性能观性分析 (9)2.2 线性二次型最优调节器原理 (10)2.3 加权阵Q和R的选择 (12)3 模糊控制的基本原理 (13)3.1 模糊理论的基本知识 (13)3.1.1 模糊控制概述 (13)3.1.2 模糊集合 (13)3.1.3 模糊规则和模糊推理 (14)3.1.4 反模糊化 (15)3.2 模糊控制系统的设计 (15)3.2.1 模糊控制系统的组成及原理 (15)3.2.2 模糊控制器设计的基本方法与步骤 (17)3.3 二级倒立摆模糊控制器的设计 (18)4 二级倒立摆模糊控制系统的MATLAB仿真 (21)4.1 基于最优调节器的二级倒立摆控制系统的MATLAB仿真 (21)4.2 基于模糊控制器的二级倒立摆控制系统的MATLAB仿真 (24)4.2.1 二级倒立摆模糊控制系统的仿真波形 (24)4.2.2 量化因子和比例因子对模糊控制器性能的影响 (25)4.3 两种控制系统的MATLAB仿真对比研究 (26)结束语 (27)致谢 (28)参考文献 (29)附录 (30)摘要本文以二级倒立摆模型为控制对象,首先阐述了倒立摆系统控制算法的研究发展过程和现状,介绍了倒立摆系统的结构和数学模型,并详细推导了二级倒立摆的数学模型。
其次,本文主要研究倒立摆系统的现代控制方法以及智能控制方法,用LQR 最优控制方法、模糊控制理论设计了控制器,通过MATLAB及SIMULINK仿真两个控制器,分析指出两方法的优缺点,结果表明:智能控制策略不仅能满足非线性系统的控制要求,而且能明显改善控制指标,整个系统具有更好的动态特性。
二阶倒立摆的稳定性控制
二阶倒立摆的稳定性控制
二阶倒立摆的稳定性控制
摘要:本文研究了二阶倒立摆系统的控制方法,采用极点配置、LQR最优控制设计了控制器,通过仿真,分析指出各种方法的优缺点。
在极点配置法中,通过仿真实验寻优,得到具有较好稳定性的初始值。
在LQR最优控制器的设计中,采用仿真结果表明:该控制策略能满足系统的控制要求,系统具有良好的动态性能。
关键词:二阶倒立摆极点配置 LQR最优控制
倒立摆系统是应用于自动控制理论的经典实验装置,是一个复杂的多变量、高度非线性、强耦合和快速运动的绝对不稳定系统,对于倒立摆的稳定性控制,不仅有重要的理论意义,而且还有很重要的工程意义。
一方面倒立摆系统成本低廉,结构简单,物理参数和结构容易调整的优点,在实验条件下容易实现。
对于倒立摆的控制会涉及控制中的许多关键问题,如镇定问题、跟踪问题、随动问题、非线性问题、及鲁棒性问题。
另一方面,任何重心在上,支点在下的控制问题都可以近似于倒立摆系统,如机器人行走的平衡问题,火箭发射的垂直控制和卫星飞行中的姿态控制等。
1 二阶倒立摆系统
二阶倒立摆系统的机械部分主要由小车、摆杆1,2、导轨、皮带轮、传动皮带等组成,电气部分由电机、功率放大器、PWM、传感器、驱动电路以及保护电路组成。
感谢您的阅读,祝您生活愉快。
直线二级倒立摆建模与matlab仿真LQR
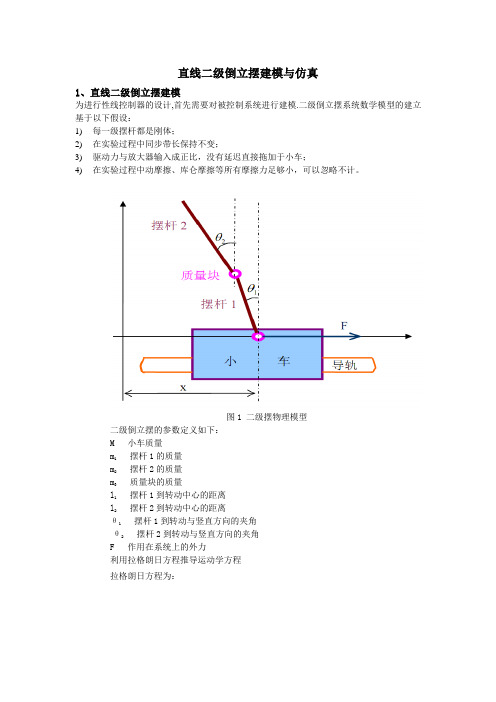
直线二级倒立摆建模与仿真1、直线二级倒立摆建模为进行性线控制器的设计,首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立基于以下假设:1)每一级摆杆都是刚体;2)在实验过程中同步带长保持不变;3)驱动力与放大器输入成正比,没有延迟直接拖加于小车;4)在实验过程中动摩擦、库仑摩擦等所有摩擦力足够小,可以忽略不计。
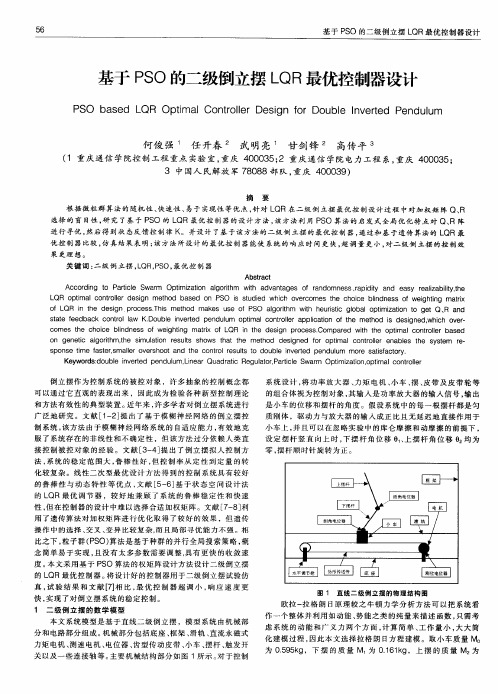
图1 二级摆物理模型二级倒立摆的参数定义如下:M 小车质量m1摆杆1的质量m2摆杆2的质量m3质量块的质量l1摆杆1到转动中心的距离l2摆杆2到转动中心的距离θ1摆杆1到转动与竖直方向的夹角θ2摆杆2到转动与竖直方向的夹角F 作用在系统上的外力利用拉格朗日方程推导运动学方程拉格朗日方程为:其中L 为拉格朗日算子,q 为系统的广义坐标,T 为系统的动能,V 为系统的势能其中错误!未找到引用源。
,错误!未找到引用源。
为系统在第i 个广义坐标上的外力,在二级倒立摆系统中,系统有三个广义坐标,分别为x,θ1,θ2,θ3。
首先计算系统的动能:其中错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
,错误!未找到引用源。
分别为小车的动能,摆杆1的动能,摆杆2的动能和质量块的动能。
小车的动能:错误!未找到引用源。
,其中错误!未找到引用源。
,错误!未找到引用源。
分别为摆杆1的平动动能和转动动能。
错误!未找到引用源。
,其中错误!未找到引用源。
,错误!未找到引用源。
分别为摆杆2的平动动能和转动动能。
对于系统,设以下变量: xpend1摆杆1质心横坐标 xpend2摆杆2质心横坐标 yangle1摆杆1质心纵坐标 yangle2摆杆2质心纵坐标 xmass 质量块质心横坐标 ymass 质量块质心纵坐标 又有:(,)(,)(,)L q q T q q V q q =-则有:系统总动能:系统总势能:则有:求解状态方程:可解得:使用MATLAB对得到的系统进行阶跃响应分析,执行命令:A=[0 0 0 1 0 0;0 0 0 0 1 0;0 0 0 0 1 01;0 0 0 0 0 0;0 86.69 -21.62 0 0 0;0 -40.31 39.45 0 0 0];B=[0;0;0;1;6.64;-0.808];C=[1 0 0 0 0 0;0 1 0 0 0 0;0 0 1 0 0 0];D=[0;0;0];sys=ss(A,B,C,D);t=0:0.001:5;step(sys,t)求取系统的单位阶跃响应曲线:图2 二级摆阶跃响应曲线由图示可知系统小车位置、摆杆1角度和摆杆2角度均发散,需要设计控制器以满足期望要求。
倒立摆的LQR稳定控制器设计

——现代控制理论实验
一、实验目的和要求
• 熟悉倒立摆的系统组成 • 学习利用MATLAB软件进行控制器的设计与仿真 • 运用LQR理论设计倒立摆的稳定控制器 • 设计的控制器能够成功进行倒立摆实时控制
二、倒立摆系统原理
计算机
运动控制卡
伺服驱动器
伺服电机
倒立摆
光电码盘1 光电码盘2
• 倒立摆系统原理图
三、理论分析
•二次型最优调节器问题 :
已知状态完全能控的线性连续定常系统,其状态方 程为:
x(t) Ax(t) Bu(t) x(0) x0
确定下列最优控制向量:
u*(t) Kx(t)
使得下列二次型性能指标达到最小值:
J (u) 1 [xT (t)Qx(t) uT (t)Ru(t)]dt 20
0 27.83
0x 0
0 1
x
0.8832u 0
0
2.357
x
x 1
y
0
0 0
0 1
0 0
x
0 0u
LQR控制器的设计
• 开环仿真
LQR控制器的设计
• 使用完全状态反馈设计控制器
• 系统在阶跃输入R作用下会偏离平衡状态,需要设计控 制器使得摆杆在控制器的作用下仍然回到垂直位置, 小车可以到达新的指定位置。
LQR控制器的设计
可以通过改变Q阵的非零元素来调节控制器以得到期望 的响应。
(2)取Q=diag(3000 0 1000 0),R=1时:
K=[-54.772,-34.419,117.17,21.918]
此时的目标泛函:
J 2
1 2ห้องสมุดไป่ตู้
基于LQR最优调节器的二级倒立摆控制系统
基于LQR最优调节器的二级倒立摆控制系统
吴文进;葛锁良
【期刊名称】《安庆师范学院学报(自然科学版)》
【年(卷),期】2007(013)002
【摘要】倒立摆是一个典型的快速、多变量、非线性、绝对不稳定系统,对倒立摆系统的稳定性研究在理论上和方法上具有深远的意义.本文建立了二级倒立摆的数学模型,并推导出模型的状态空间表达式,分析了系统的稳定性,能控性和能观性,利用了线性二次型最优调节器(LQR)方法实现对二级倒立摆的最优控制,MATLAB仿真结果表明了该方法的有效性.
【总页数】4页(P32-34,41)
【作者】吴文进;葛锁良
【作者单位】安庆师范学院,物理与电气工程学院,安徽,安庆,246011;合肥工业大学,电气与自动化工程学院,安徽,合肥,230009
【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于LQR的直线二级倒立摆最优控制系统研究 [J], 赵文龙;陈能祥;杜浩藩;李海燕
2.基于LQR最优调节器的平面二级倒立摆的建模与仿真 [J], 姜岩蕾;史增芳
3.基于混合算法的二级倒立摆LQR最优控制器设计 [J], 孔德帅
4.基于LQR最优调节器的三自由度直升机控制系统 [J], 赵笑笑;董秀成
5.基于LQR最优调节器的倒立摆控制系统 [J], 黄丹; 周少武; 吴新开; 张志飞因版权原因,仅展示原文概要,查看原文内容请购买。
基于PSO的二级倒立摆LQR最优控制器设计
倒 立摆 作 为 控 制 系 统 的被 控 对 象 ,许 多 抽 象 的控 制 概 念 都 可 以 通 过它 直 观 的表 现 出 来 , 因此 成 为 检 验 各 种 新 型 控 制 理 论 和 方 法 有效 性 的典 型 装 置 。 年 来 , 多 学 者 对 倒 立摆 系统 进 行 近 许 广 泛 地 研 究 。 文 献 [— ] 出 了 基 于 模 糊 神 经 网 络 的 倒 立 摆 控 12提 制 系 统 , 方 法 由 于模 糊 神 经 网 络 系 统 的 自适 应 能 力 , 效 地 克 该 有 服 了 系 统存 在 的非 线 性 和 不 确 定 性 ,但 该 方 法 过 分 依 赖 人 类 直 接 控 制 被 控 对 象 的 经 验 。文 献 [ — ] 出 了倒 立 摆 拟 人 控 制 方 34提
优 控 制 器 比 较 , 真 结 果表 明 : 方 法 所 设 计 的 最 优 控 制 器 能 使 系统 的 响 应 时 间更 快 , 调 量 更 小 , 二 级 倒 立 摆 的 控 制 效 仿 该 超 对
果更理想。
关 键 词 : 级 倒 立摆 ,QR P 0, 二 L ,S 最优 控 制 器
基 于 P O 的 二级 倒 立 摆 L S QR最 优 控 制器 设 计
基于 P O的二级倒立摆 L S QR最优控制器设计
P O a e L S b s d QR Op i lCo t l r De i n f r t ma n r l sg o Do bl n e t d P n uu oe u e Iv r e d lm e
,
L QR tmal o r l op i c nt erdesgn ol i metod h ba ed n s o PS O i su e whi o er m e te hoc bl dn s f s tdid ch v co s h c ie i es o wei ig n ght m ar n ti x of QR i t e L n h de i prce s. i m e h d sgn o s Ths t o mak s s o PS e u e f O al i m wi h r t gl l t iat n o gorh t t eu i i h s c oba op i z i t ge Q 、 m o t R a nd s ae e t t fedb k co tol aw K. ubl ivet d ac n r l Do e n re pen lm o i c tol a duu pt mal onr l er ppl a in h metod s i to oft e c h i de i e whi o er sgn d ch v .
二级直线型倒立摆系统的LQR控制探析

统 的控 制器 , 并 进行 了数值 仿 真 , 结 果表 明 了该 方法 的有效 性 。
关 键词 : 倒 立摆 ; L QR ; 数值仿 真
0 引 言
字母符号
表 1 二 级 直 线 型 倒 立 摆 系统 的 结 构 参 数
对应参数 字母符 号 对应参数
倒立摆 系统是一种多变量 、 强耦 合 、 严 重非线性 、 自然不稳
现 了 四级 倒 立 摆 控 制 仿 真 实 验 。线 性 二 次 型 调 节 器 ( L Q R) 的
0 3 × 1 0 3 ×1 03 × 1
0 0 0
L× 3
0 1 x 3
0 3 x 1
1
最优控制_ 】 是基 于现代控 制理论 发展 起来 的 , 通过对 倒立 摆 系统 的分析建立其动力学模型 , 应用 状态反馈 控制器使得 目标
1 4 3
2 0 1 3 第 9期 总第 3 6 3期
s n e J — u F e n × 量 坌 堑 鍪
2 . 3 计算风 阻, 并 确 定 风 机 的 工 作点
根据风机形成 的实际风速 1 3 . 5 m/ s , 则雷诺数为 :
R 一l 0 V / 一1 . 1 1 ×1 3 . 5 ×6 . 6 9 ×1 0 ~/ ( 1 9 . 4 ×1 0 一 ) 一5 1 6 7
s n e j — u F e n × ! 量 坌 羹
二 级直 线 型 倒 立 摆 系 统 的 L QR控 制 探 析
王春平
( 杭州佐 帕斯 工 业有 限公 司 , 浙 江 杭州 3 1 0 0 1 8 )
摘
要: 以二级 直线 型倒立 摆 系统 为研究 对象 , 基 于线 性二 次 型调 节 器 ( L i n e a r Q u a d r a t i c R e g u l a t o r , L Q R ) 理 论 设 计 了二 级倒 立 摆 系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录0. 前言 (1)1. 倒立摆 (2)1.1倒立摆的结构和工作原理 (2)1.2 倒立摆的特性 (3)1.3控制方法 (3)1.4课设目的 (4)2. 直线二级倒立摆的数学模型的建立与分析 (4)2.1建立数学模型 (4)2.2 系统的能控能观测性分析 (8)3. LQR控制器的设计 (9)3.1关于二次型最优控制(LQR) (9)3.2 LQR的基本原理 (10)3.3加权阵Q和R的选择 (11)4. LQR控制器参数的调试与仿真 (12)5. 总结与体会 (17)参考文献 (18).课设题目针对直线二级倒立摆的LQR控制系统设计金万福沈阳航空航天大学自动化学院摘要:倒立摆系统是一个典型的多变量、非线性、强耦合和快速运动的高阶不稳定系统,它是检验各种新的控制理论和方法有效性的典型理想模型。
在其控制过程中,能有效地反映诸如镇定性、鲁棒性、随动性以及跟踪等许多关键问题。
本文主要研究二级倒立摆LQR控制方法。
首先建立了二级倒立摆的数学模型,然后对二级倒立摆的数学模型进行控制设计,应用遗传算法确定系统性能指标函数中的加权阵Q,R得到系统状态反馈控制矩阵。
最后,用MATLAB进行了系统仿真。
在几次凑试Q矩阵值后系统的响应结果都不尽如人意,于是采用遗传算法对Q矩阵优化。
仿真结果证明:经过遗传算法优化后的系统响应能更加满足设计要求。
关键词:二级倒立摆;LQR控制;遗传算法0. 前言随着现代科学技术的快速发展,控制工程所面临的问题越来越复杂。
许多系统具有严重非线性、模型不确定、大滞后等特点。
倒立摆就是这样的复杂系统,对它的研究具有一般性。
倒立摆源于火箭发射器,最初的研究开始于二十世纪50 年代,由美国麻省理工学院的控制理论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。
倒立摆的控制技巧同杂技运动员倒立平衡表演有异曲同工之处,这表明一个不稳定的被控对象,通过人的直觉、采取定性的手段,可以使之具有良好的稳定性。
在控制理论的发展过程中,某一理论的正确性及其在实际应用中的可行性需要一个按其理论设计的控制器去控制一个典型对象来验证。
倒立摆系统作为一个实验装置,形象直观,结构简单,成本低廉;作为一个控制对象,他又相当复杂,同时就其本身而言,是一个高阶次、不稳定、多变量、非线性、强耦合系统,只有采取行之有效的控制方法才能使之稳定,因此倒立摆装置被公认为是自动控制理论中的典型实验设备[1]。
通过对倒立摆系统的研究,不仅可以解决控制中的理论问题,还能将控制理论所涉及的三个基础学科:力学、数学和电学有机的结合起来,在倒立摆系统中进行综合应用。
对倒立摆系统进行控制,其稳定效果非常明了,可以通过角度、位移和稳定时间直接度量,控制好坏一目了然。
理论是工程的先导,对倒立摆的研究不仅有其深远的理论意义,还有重要的工程背景。
从日常生活中所见到的任何重心在上,支点在下的控制问题,到空间飞行器和各类伺服云台的稳定,都和倒立摆的控制有很大的相似性,故对其的稳定控制在实际中有很多用场,如海上钻井平台的稳定控制、卫星发射架的稳定控制、火箭姿态控制、飞机安全着陆化工过程控制等都属于这类问题。
针对上面的实际问题,启发了人们采用智能控制方法对倒立摆进行控制。
因此对倒立摆机理的研究具有重要的理论和实际意义,成为控制理论中经久不衰的研究课题。
1.倒立摆1.1倒立摆的结构和工作原理倒立摆系统是一个多变量、快速非线性和自然不稳定系统。
在控制过程中能有效地反映控制中的许多关键问题,如非线性问题系统的鲁棒性问题、随动问题、镇定问题及跟踪问题等。
倒立摆系统作为一个实验装置形象直观结构简单构件组成参数和形状易于改变成本低廉。
倒立摆系统的控制效果可以通过其稳定性直观地体现,也可以通过摆杆角度小车位移和稳定时间直接度量。
如图1.1,系统包括计算机、运动控制卡、伺服机构、倒立摆本体(小车,上摆,下摆,皮带轮等)和光电码盘几大部分,组成了一个闭环系统。
光电码盘1将小车的位移、速度信号反馈给伺服驱动器和运动控制卡,下面一节摆杆(和小车相连)的角度、角速度信号由光电码盘2反馈回控制卡和伺服驱动器,上面一节摆杆的角度和角速度信号则由光电码盘3反馈。
计算机从运动控制卡中读取实时数据,确定控制决策(小车向哪个方向移动、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持两节摆杆的平衡。
图1.1 系统结构和工作原理图1.2 倒立摆的特性a.非线性倒立摆是一个典型的非线性复杂系统,实际中可以通过线性化得到系统的近似模型,线性化处理后再进行控制。
也可以利用非线性控制理论对其进行控制。
倒立摆的非线性控制正成为一个研究的热点。
b.不确定性主要是模型误差以及机械传动间隙,各种阻力等,实际控制中一般通过减少各种误差来降低不确定性,如通过施加预紧力减少皮带或齿轮的传动误差,利用滚珠轴承减少摩擦阻力等不确定因素。
c.耦合性倒立摆的各级摆杆之间,以及和运动模块之间都有很强的耦合关系,在倒立摆的控制中一般都在平衡点附近进行解耦计算,忽略一些次要的耦合量。
d.开环不稳定性倒立摆的平衡状态只有两个,即在垂直向上的状态和垂直向下的状态,其中垂直向上为绝对不稳定的平衡点,垂直向下为稳定的平衡点。
e.约束限制由于机构的限制,如运动模块行程限制,电机力矩限制等。
为了制造方便和降低成本,倒立摆的结构尺寸和电机功率都尽量要求最小,行程限制对倒立摆的摆起影响尤为突出,容易出现小车的撞边现象。
1.3 控制方法当前,倒立摆的控制方法可分为以下几类:a.线性理论控制方法将倒立摆系统的非线性模型进行近似线性化处理,获得系统在平衡点附近的线性化模型然后再利用各种线性系统控制器设计方法,得到期望的控制器PID控制、状态反馈控制、LQR控制法是其典型代表这类方法对一、二级的倒立摆(线性化后误差较小模型较简单)控制时,可以解决常规倒立摆的稳定控制问题但对于像非线性较强模型较复杂的多变量系统(三四级以及多级倒立摆)线性系统设计方法的局限性就十分明显,这就要求采用更有效的方法来进行合理的设计。
b.预测控制和变结构控制方法由于线性控制理论与倒立摆系统多变量、非线性之间的矛盾,使人们意识到,针对多变量、非线性对象,采用具有非线性特性的多变量控制。
解决多变量非线性系统的必由之路。
人们先后开展了预测控制、变结构控制和自适应控制的研究。
预测控制是一种优化控制方法,强调的是模型的功能而不是结构。
变结构控制是一种非连续控制,可将控制对象从任意位置控制到滑动曲面上仍然保持系统的稳定性和鲁棒性,但是系统存在颤抖。
预测控制、变结构控制和自适应控制在理论上有较好的控制效果,但由于控制方法复杂成本也高不易在快速变化的系统上实时实现。
c.智能控制方法在倒立摆系统中用到的智能控制方法主要有神经网络控制、模糊控制、仿人智能控制、拟人智能控制和云模型控制等。
(1)神经网络控制神经网络能够任意充分地逼近复杂的非线性关系,能够学习与适应严重不确定性系统的动态特性,所有定量或定性的信息都等势分布贮存于网络内的各种神经元,有很强的鲁棒性、容错性也可将学习算法和神经网络有效结合,实现状态未离散化的倒立摆的无模型学习控制。
但是神经网络控制方法存在的主要问题是缺乏一种专门适合于控制问题的动态神经网络,而且多层网络的层数、隐层神经元的数量、激发函数类型的选择缺乏指导性原则等。
(2)模糊控制经典的模糊控制器利用模糊集合理论将专家知识或操作人员经验形成的语言规则直接转化为自动控制策略,它的设计不依靠对象精确的数学模型,而是利用其语言知识模型进行设计和修正控制算法。
常规的模糊控制器的设计方法有很大的局限性。
首先,难以建立一组比较完善的多维模糊控制规则,即使能凑成这样一组不完整的粗糙的模糊控制规则,其控制效果也是难以保证的。
(3)云模型控制利用云模型实现对倒立摆的控制,用云模型构成语言值用语言值,构成规则,形成一种定性的推理机制。
这种拟人控制不要求给出被控对象精确的数学模型,仅仅依据人的经验、感受和逻辑判断,将人用自然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性问题和不确定性问题。
1.4 课设目的本次课程设计通过线性二次型最优控制(LQR)方案令二级倒立摆达到稳定状态,用MATLAB和Simulink对控制方案进行了仿真,并实现了二级倒立摆实物系统的稳定控制。
a.建立二级倒立摆系统的数学建模。
b.研究倒立摆系统稳定控制方法,用线性二次型最优控制(LQR)方案配置控制对二级倒立摆系统进行稳定性控制。
c.学习Simulink仿真系统的方法。
d.进行调试,对结果进行分析。
达到预定的稳定精度要求。
2.直线二级倒立摆数学模型的建立与分析2.1 建立数学模型系统建模可以分为两种:机理建模和实验建模。
实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。
这里面包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容。
机理建模就是在了解研究对象的运动规律基础上,通过物理、化学的知识和数学手段建立起系统内部的输入状态关系。
为简化系统,我们在建模时忽略了空气阻力和各种摩擦,并认为摆杆为刚体。
二级倒立摆的组成如图2.1所示:图2.1 直线两级倒立摆物理模型倒立摆参数定义如下:M 小车质量m 1摆杆 1的质量m 2摆杆 2 的质量m 3质量块的质量l1摆杆1 中心到转动中心的距离l2摆杆2 中心到转动中心的距离θ1 摆杆1 与竖直方向的夹角θ2 摆杆 2 与竖直方向的夹角F 作用在系统上的外力利用拉格朗日方程推导运动学方程:拉格朗日方程为:),(),(),(),(q q V q q T q q T qq L -== (2.1) 其中L 为拉格朗日算子,q 为系统的广义坐标,T 为系统的动能,V 为系统的势能。
i i i f q L qL dt d =∂∂-∂∂ (2.2)其中i f n i ,......3,2,1=,i f 为系统在第i 个广义坐标上的外力,在二级倒立摆 系统中,系统的广义坐标有三个广义坐标,分别为21,,θθx 。
首先计算系统的动能:321m m m M T T T T T +++= (2.3) 其中321,,,m m m M T T T T 分别为小车的动能,摆杆1的动能,摆杆2的动能和 量块的动能。
小车的动能:2M Mx 21T =(2.4) 211m m m T T T ''+'=,其中21,m m T T '''分别为摆杆1的平动动能和转动动能。
222m m m T T T ''+'=,其中22,m m T T '''分别为摆杆2的平动动能和转动动能。