DSM8010位置控制器编码器控制模式
华中HSV-180D系列交流伺服调试说明书V2.0
HSV-180D系列交流伺服驱动单元(025/035/050/075)调试说明书V2.02010.11武汉华中数控股份有限公司中国·武汉HSV-180D全数字交流伺服驱动单元调试指导书1.目的针对华中数控系统有限公司生产的HSV-180D交流伺服驱动单元进行生产检测和调试。
2.适用范围HSV-180D-025、035、050、075 交流伺服驱动单元的检测和调试。
3.职责半成品电气工程师负责HSV-180D交流伺服驱动单元的生产检测和调试工作。
4.使用设备名称数量CST-20型伺服测试台一台数字万用表一块数字示波器一台三相 9KVA调压器一台登奇5.5KW伺服电机一台三相交流电抗器WDSK-7.5 一台伺服变压器380V/380V/9KVA 一台HNC-21MD世纪星数控装置一台5.伺服驱动单元说明5.1伺服驱动单元参数规格5.1.1 伺服驱动单元规格型号说明图5.1 伺服驱动单元规格型号说明5.1.2伺服驱动单元规格型号表5.1 伺服驱动单元规格型号一览表规格连续电流(A)短时最大电流(A)适配最大电机功率(KW )HSV-180D-025 10 15 2.2KW HSV-180D-035 14 21 3.7KW HSV-180D-050 20 30 5.5KW HSV-180D-075 28437.5KW5.1.3伺服驱动单元技术规格表5.2 伺服驱动单元技术规格主回路电源 三相AC380V-15%~+10% 50/60Hz控制方式① 位置控制 ②外部速度控制 ③转矩控制JOG ④控制 ⑤内部速度控制速度频率响应 300Hz 或更高速度波动率 <±0.1(负载0%~100%);<±0.02(电源-15%~+10%)(数值对应于额定速度)调速比 1:6000 特性脉冲频率 ≤500kHz控制输入①伺服使能 ②报警清除③偏差计数器清零④指令脉冲禁止CCW ⑤驱动禁止CW ⑥驱动禁止⑦零速锁定输入 控制输出① 伺服准备好输出 ②伺服报警输出③定位完成输出/速度到达输出输入方式 ① 两相A/B 正交脉冲② 脉冲+方向③ CCW 脉冲/CW 脉冲电子齿轮 1~32767/1~32767位置控制反馈脉冲光电编码器线数1000p/r 、1024p/r 、2000p/r 、2500p/r加减速功能 参数设置1~32000ms(0~2000r/min 或2000~0r/min)监视功能转速、当前位置、指令脉冲积累、位置偏差、电机转矩、电机电流、转子位置、运行状态、输入端子信号等保护功能超速、主电源过压、欠压、过流、过载、编码器异常、过热、位置超差等操作 6个LED 数码管、2个发光二极管、5个按键(HSV-180D-025,035,050,075) 适用负载惯量小于电机惯量的5倍5.2 信号与功能5.2.1 端子配置图5.2为伺服驱动单元接口端子配置图。
EP100伺服驱动器简明手册第七版

MaxsineEP100系列交流伺服驱动器简明手册第1章产品检查与安装1.3 伺服电机安装1.3.1 安装环境条件●工作环境温度:0~40℃;工作环境湿度:80%以下(无结露)。
●贮存环境温度:-40~50℃;贮存环境湿度:80%以下(无结露)。
●振动:0.5G以下。
●通风良好、少湿气及灰尘之场所。
●无腐蚀性、引火性气体、油气、切削液、切削粉、铁粉等环境。
●无水汽及阳光直射的场所。
1.3.2 安装方法●水平安装:为避免水、油等液体自电机出线端流入电机内部,请将电缆出口置于下方。
●垂直安装:若电机轴朝上安装且附有减速机时,须注意并防止减速机内的油渍经由电机轴渗入电机内部。
●电机轴的伸出量需充分,若伸出量不足时将容易使电机运动时产生振动。
●安装及拆卸电机时,请勿用榔头敲击电机,否则容易造成电机轴及编码器损坏。
1.4 电机旋转方向定义本手册描述的电机旋转方向定义:面对电机轴伸,转动轴逆时针旋转(CCW)为正转,转动轴顺时针旋转(CW)为反转。
图1.2 电机旋转方向定义第2章接线2.1 配线规格●线径:R、S、T、PE、U、V、W端子线径≥1.5mm2(AWG14-16),r、t端子线径≥0.75mm2(AWG18);●端子采用预绝缘冷压端子,务必连接牢固;●建议采用三相隔离变压器供电;2.2 配线方法●输入输出信号线和编码器信号线,请使用推荐的电缆或相似的屏蔽线,配线长度为:输入输出信号线3m以下,编码器信号线20m以下。
接线时按最短距离连接,越短越好,主电路接线与信号线要分离。
●接地线要粗壮,作成一点接地,伺服电机的接地端子与伺服驱动器的接地端子PE务必相连。
●为防止干扰引起误动作,建议安装噪声滤波器,并注意:1) 噪声滤波器、伺服驱动器和上位控制器尽量近距离安装。
2) 继电器、电磁接触器、制动器等线圈中务必安装浪涌抑制器。
3) 主电路和信号线不要在同一管道中通过及不要扎在一起。
●在附近用强烈干扰源时(如电焊机、电火花机床等),输入电源上使用隔离变压器可以防止干扰引起误动作。
运动控制器“原点返回”的14种模式及参数说明
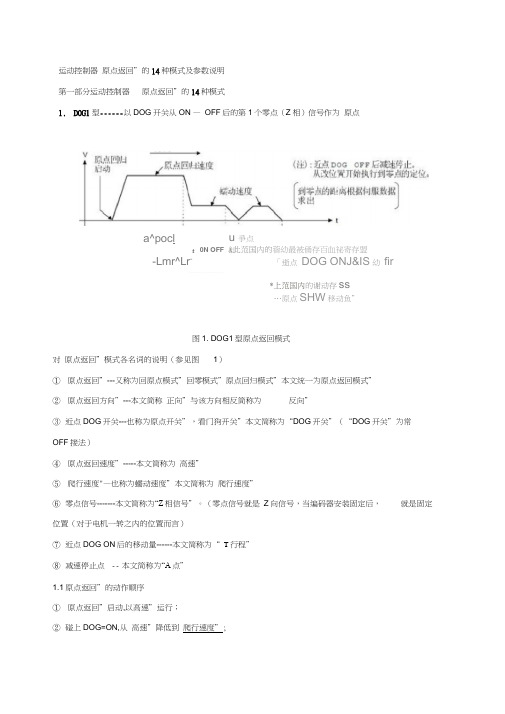
运动控制器 原点返回”的14种模式及参数说明 第一部分运动控制器原点返回”的14种模式1. D0G1型------以DOG 开关从ON — OFF 后的第1个零点(Z 相)信号作为 原点u 爭点&此范国内的蓿幼最被俑存百血祕寄存盟「逝点 DOG ONJ&IS 幼 fir *上范国内的谢动存ss …原点SHW 移动鱼”图1. DOG1型原点返回模式对 原点返回”模式各名词的说明(参见图1)① 原点返回”---又称为回原点模式”回零模式”原点回归模式”本文统一为原点返回模式” ② 原点返回方向”---本文简称 正向”与该方向相反简称为反向”③ 近点DOG 开关---也称为原点开关”,看门狗开关”本文简称为“DOG 开关”(“DOG 开关”为常 OFF 接法)④ 原点返回速度”-----本文简称为 高速”⑤ 爬行速度"—也称为蠕动速度”本文简称为 爬行速度”⑥ 零点信号-------本文简称为“Z 相信号”。
(零点信号就是 Z 向信号,当编码器安装固定后, 就是固定位置(对于电机一转之内的位置而言)⑦ 近点DOG ON 后的移动量------本文简称为“ T 行程” ⑧ 减速停止点 -- 本文简称为“A 点” 1.1原点返回”的动作顺序① 原点返回”启动,以高速”运行;② 碰上DOG=ON,从 高速”降低到爬行速度”;a^pocl :0N OFF -Lmr^Lr ----------------------------------③当DOG从ON---OFF,从爬行速度”减速停止,速度降为零。
又从零速”上升到爬行速度”,当检测到第1个“Z相信号”时,该“Z相信号”位置就是原点”。
同时该轴停止在原点位置上。
(从减速停止点A”到“Z相)信号”点是定位过程,所以能够精确定位)1.2原点返回”不能正常执行的原因(1)从原点返回启动位置"到减速停止点A"这一区间内如果没有经过Z相信号"点一次,(Z相通过信号M2406+20N),系统会产生报警(ZCT )并减速停止。
华中8型数控系统参数配置教材

8型系统硬件的进给修调通常都是波 段开关。每一档都对应一个IO组合。 如何将这些IO组合变成相应的数值了? 在8B中这给波段开关使用的是整个 X488组的全8位。 在梯图中不用像主轴修调一样只取 低三位。
01000100010010001001010000
如图直接用 COD将P参数第8 个开始向后21 个对应X488的 IO组合。
3.4 通过P参数设置主轴修调 在8型PLC中设置主轴修调用SPDLOVRD模块
01000100010010001001010000
参数1:通道号; 参数2:主轴号; 参数3:修调值,要设置的修调值通常放在寄存器中,可以 使用寄存器R。 这里我们用的是R10 在FG编程中只需要将R10赋值给G2566即可。
01000100010010001001010000
最后用COD模块将IO组合后的数与P参数对应 起来。 参数1:转换数 据的起始位置 参数2:转换数 据的个数,可以 使用常数; 参数3:源数据,可以使用寄存器R; 参数4:目标数据的输出地址,可以使用寄存器R。
3.5 通过P参数设置主轴修调梯图
01000100010010001001010000
4.6.1 运动规划方式
在8型软件中对小线段的处理分为两种,由运动规划方式 来选择。 两种运动规划方式的不同如下表所示: 快移加减速捷度时 加工加减速捷度时 间常数 间常数 有效 有效 无效 有效
01000100010010001001010000
负方向limitlimithome轴正方向轴负方向limitlimithome轴正方向轴负方向负向回参考点正向回参考点3153231532回参考点后的偏移量回参考点后的偏移量参考点开关z相脉冲搜索方向反向定位搜索z相脉冲双向回参考点参考点偏差回参考点时系统检测到z脉冲后可能不作为参考点而是继续走过一个参考点偏差值才将其坐标设置为参考点
艾默生E变频器调试指导书完整版

艾默生E变频器调试指导书HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】E S2402变频器调试指导书1、1、编码器连接(海德汉ECN1313)2、操作器操作说明面板操作说明键盘包括:导航键、一个模式键M、三个控制键(含红色复位键)四维导航键用于控制参数结构并更改参数值。
模式键用于切换各种显示模式,如察看参数,编辑参数、状态。
若选用键盘模式,可用三个控制键控制变频器。
红色停止键可以用于变频器复位。
如果你第一次使用变频器时(单独变频器时,当变频器已安装柜内且到现场后,请不要随便按此操作),变频器恢复出厂值方法:方法是=1233(欧洲标准),然后按红色复位键改变控制模式方法:将=1253(欧洲标准),按红色复位键,然后?从OPEN LP更改到SERVO。
按复位键(红色)显示所有菜单方法:=L2,按M键,将=1000,按红色复位键保存软件版本查询:改变模式并恢复出厂值(菜单15到20除外):=1255,按红色复位键3、自学习步骤一、自学习前准备工作:1、使主机脱离负载。
2、通过短接线路的方法,使变频器输出接触器和抱闸打开,同步主机保证封星短接线已经断开,(如3、果满足检修条件,可以不用短接线路,直接按检修上行或下行信号控制器会输出变频器输出接触?器,方向及使能信号、抱闸信号)4、设定参数=SERO(闭环伺服)控制模式。
5、确定在变频器的扩展模块槽2上插入编码器分频卡(UniversalEncoder??Plus),变频器的扩展模块槽见说明书。
设定参数=06、在连接编码器前最好检查一下参数(变频器提供给编码器的电源电压),出厂缺省值=5V。
预防该参数修改后损坏编码器。
7、连接编码器,把编码器的接口连到变频器的15针编码器的输入口上(而不是PG卡的15针插口),并固定。
8、把参数调到菜单(速度反馈),人为的正、反转动主机同时监控一下菜单界面,是否有正、反速度反馈,若没有的情况下请检修编码器的接线是否正确。
松下门机控制器-编码器方式调试
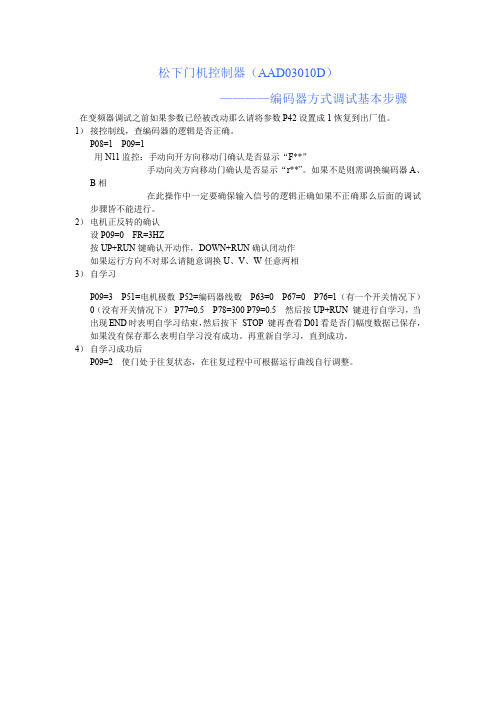
松下门机控制器(AAD03010D)
————编码器方式调试基本步骤
在变频器调试之前如果参数已经被改动那么请将参数P42设置成1恢复到出厂值。
1)接控制线,查编码器的逻辑是否正确。
P08=1 P09=1
用N11监控:手动向开方向移动门确认是否显示“F**”
手动向关方向移动门确认是否显示“r**”。
如果不是则需调换编码器A、B相
在此操作中一定要确保输入信号的逻辑正确如果不正确那么后面的调试步骤皆不能进行。
2)电机正反转的确认
设P09=0 FR=3HZ
按UP+RUN键确认开动作,DOWN+RUN确认闭动作
如果运行方向不对那么请随意调换U、V、W任意两相
3)自学习
P09=3 P51=电机极数P52=编码器线数P63=0 P67=0 P76=1(有一个开关情况下)0(没有开关情况下)P77=0.5 P78=300 P79=0.5 然后按UP+RUN 键进行自学习,当出现END时表明自学习结束,然后按下STOP 键再查看D01看是否门幅度数据已保存,如果没有保存那么表明自学习没有成功。
再重新自学习,直到成功。
4)自学习成功后
P09=2 使门处于往复状态,在往复过程中可根据运行曲线自行调整。
西奥主板数码管状态模式码
西奥主板数码管状态模式码西奥SMART主板调试(上)西奥称重调试说明西奥SMART板上行超速试验方法步骤西奥SMART主板安全回路短接及旁路操作说明西奥SMART井道自学习方法西奥系列功能参数设置(上)西奥SMART主板安全回路短接及旁路操作说明西奥SMART主板手动抱闸力矩检测测试方法西奥SMART主板UCMP轿厢移动测试方法西奥ALMCB/HAMCB板启动舒适感倒溜调试西奥DO3000 Easy-con门机简单调试西奥SMART同步机轿厢意外移动测试/抱闸力矩测试说明西奥SMART板小键盘使用说明菜单西奥SMART板小键盘介绍说明抱闸力矩检测测试方法西奥系列常见驱动故障及排除方法(上)西奥系列常见驱动故障及排除方法(中)西奥系列常见驱动故障及排除方法(下)西奥系列查看主板故障及驱动故障清除及常见闪烁的信息西奥系列ALMCB和HAMCB板介绍培训西奥GECS扶梯自学习调试方法西子奥的斯AMCB2板说明及井道自己学习方法西奥调试服务器及系统菜单说明培训(上)西奥调试服务器及系统菜单说明培训(中)西奥调试服务器及系统菜单说明培训(下)西奥系列新增UCMP功能故障排查及解决方法西奥SMART慢车调试运行奥的斯蓝牙APP手机服务器操作说明西奥SMART板服务器介绍常用的状态输入输出信号(中)西奥系列RS32板轿厢通讯板I/O地址设置外呼板I/O地址设置I/O地址取反设置西奥SMART主板端子介绍服务器菜单培训(上)西奥系列ALMCB板HAMCB板井道自学习方法步骤西奥系列IO地址设置服务使用介绍西奥主板数码管状态模式码AL000EPC紧急电源管制模式AL001COR复位摸式检修后或楼层信息错误后AL002EFS消防员服务模式AL003EFO消防操作模式AL004EQO地震操作模式AL005EPR应急较援现作模式AL006EPW应急救援等待模式AL007OLD超载模式AL008ISC独立模式AL009ATT司机模式AL010CTL轿厢至特定楼层模式AL011主板CHC按下关闭大厅呼梯禁止外呼模式LNS满载直驾模式AL013MIT中度载客交通流量模式AL014DCP延迟轿厢保护模式可能光幕动作或常时间档门AL015ANS防捣乱模式AL016ARD自动返基站模式应急平层装置AL017PKS锁停模式AL018GCB按钮控制模式ALO19EHS紧急医用服务模式AL020ROT骚扰模式AL021INI系统初始化模式AL022INS检修运行模式AL023ESB安全回路断开故障模式AL024DHB门保持模式AL025ACP防把罪保护模式AL026WCO轿厢野蛮操作外呼无效模式DBF (DBSS故端模式)AL028SHO安息日操作模式AL029DAR带有自动返回至最低停的D8SS故障模式液压AL030DCS检查门顺序模式做DCS学习AL031UFS上极开关触发DS3模式AL032ACC加速至NOMSPE或者SHR SPE模式AL033DLM门锁短接故障ALO34WDP防水模式AL035MOT下高峰相关的前期资料推送请点击下方链接查看:奥的斯服务器查看主板故障清除故障奥的斯DO3000S门机调试说明西子奥的斯OH6000主板与接口板端子介绍奥的斯服务层设置楼层显示设置外呼地址设置西子奥的斯OH6000系列主板故障码分析奥的斯服务使用快捷键参数菜单中文说明奥的斯钢带检测常见故障处理及调试学习奥的斯无机房SPBCII板常用功能按钮介绍奥的斯ACD系列变频器通用最新故障码含新国标(上)奥的斯ACD系列变频器通用最新故障码含新国标(中)奥的斯ACD系列变频器通用最新故障码含新国标(下)奥的斯ACD系列通用最新故障码(上)奥的斯ACD系列通用最新故障码(中)奥的斯ACD系列通用最新故障码(下)奥的斯ACD-MR无机房SPB厅外服务显示板操作培训奥的斯系列M1111常见的闪动状态模式西子奥的斯AMCB2板说明及井道自己学习方法奥的斯无机房ACD2/3-MRL临时屏蔽抱闸检测开关操作说明奥的斯ACD-MR无机房SPB厅外服务显示板操作培训奥的斯OH6000井道学习方法步骤奥的斯和西奥系列状态操作模式代码表奥的斯显示DLM状态现场故障排查奥的斯ACD系列GECB板轿顶板轿厢板端子介绍奥的斯DO3000门机简单快捷调试方法奥的斯ACD/Gen2系列井道自学习过程中常见故障处理奥的斯启动倒溜舒适感调整奥的斯ACD5MR主板轿顶板轿厢通讯板端子说明完整版全系列奥的斯及西奥系列服务器查看故障及清除故障奥的斯AT120门机学习奥的斯上行超速保护测试操作奥的斯ACD系列1135DCS门检测学习奥的斯ACD系列M243电梯自动找底层。
ABB变频器800参数设置及故障处理解读
BR OVERHEAT(7112)
3.18 AW 5 bit 2
制动电阻器过载。
停止传动,让电阻器冷却下来。
检查电阻器过载保护功能的参数设置(参见参数组27 BRAKE CHOPPER)。
检查制动周期以符合限幅要求。
CALIBRA DONE
(FF37)
对输出电流互感器的校正完毕。
简明调试参数
选择语言。通常,参数设置过程如下所示。
参数设置过程:
- 按PAR 进入控制盘的参数模式设置。
- 按双箭头键 (上或下)滚动选择到所要设置的参数组名。
- 按单箭头键 (上或下) 滚动选择到参数组内的参数。
- 按ENTER 激活所设置的新值。
- 修改参数值可以按单箭头键 (上或下),也可以按双箭头键 (上或下)进行快速修改。
参数设置
15 ANALOGUE OUTPUTS选择由模拟输出显示的实际信号。输出信号处理。的可编程的模拟输出部分。
15.01 ANALOGUE OUTPUT1选择一个传动信号到模拟输出。设为CURRENT输出电流,20 mA =电机额定电流。刷新时间间隔为24 ms
15.02 INVERT AO1模拟输出AO1取反功能。当传动信号为最大值时,对应的模拟信号为最小值,反之亦然。设为ON
三、故障显示、原因及处理方法
由传动产生的警告信息
警告
原因
解决方法
ACS800 TEMP
(4210)
3.08 AW 1 bit 4
传动IGBT温度过高。故障跳闸极限为100%。
检查环境条件。
检查通风条件和风机运行状态。
检查散热器的散热片,清除灰尘。
检查电机功率是否合适。
CNCW8808D单轴伺服控制器
WEDE CNC TECHNOLOGY CO.,LTD
度
6
PPR 每 转 脉 和 伺 服 驱 1 - 700
冲数
动 器 设 定 60000
值相同
7
GRP 减 速 比 减速比 2.5, 1 - 2857
上 下 齿 则 设 为 60000
数 比 扩 2500
大 1000 倍
8
GLD 胶 辊 直 设 定 为 300 -
接步进时最高转速参数设为 1000 左右。
如有技术问题请及时联系我们,谢谢您的使用。
11
2
Everything under control
一 单轴控制器产品面板
WEDE CNC TECHNOLOGY CO.,LTD
二操作说明
1. 上电状态 上电后系统显示版本号 然后系统自动进入待机状态。 LED 显示屏幕的右上角显示组计数, 右下角显 示总数,左上角显示每分钟张树,左下角显示当前工作模式, P -白袋 C- 追亮 D-追暗
2 速度参数错 重新调整与寸动速度相关的 1- 5 号内部参
误
数
3 追色错误
1 检查定长设置,检查电眼设置
2 检查 5 号参数是否设置过大
3 检查 12 号参数是否过小
4 堵袋错误
1 降低变频器频率
2 提高送料速度,调整 3 号参数或选用高 转速伺服电机
5 自动追色失 1 用于在两倍袋长范围内检查不到色标, 即
正负追色 长度范围 内追色
14 JRS
寸动转 速
1-1000 120
15 DIR 方向
0-1
0
16 HDT 热 针 时 间毫秒
0 -0 60000
18 TBT
新时达控制系统手册
这里给出输入类型的目的是要求现场的开关类型和此相同,不需要的常闭点现场可以短接处理(如X3、X4等)。
*****变频驱动时,设置F58=0。
*****对应输入点的LED显示对照表为1.4.2 主板工作电源接口定义正视主控制器左边为JP5端子,它是为主控制器提供工作电源的接口,由外部开关电源供电;具体定义见下表:1.4.3主板通讯接口定义正视主控制器右上角为JP6、JP22端子,JP6是作为连接轿厢板的通讯端口,必须采用双绞线,TXV1+、TXV1-用一股双绞线,而TXA1+、TXA1-用另一股双绞线;JP22是作为并联接口,作并联时对应连接两台主机的JP22.1、P22.2和JP22.3三根线,其中TXA2+和TXA2-用一股双绞线;具体定义见下表:1.4.4 主板输出接口定义主控制器右边的JP7、JP8端子共16点为继电器开关量输出,SM-Sec型主板有分为4组共16点的开关量输出,其中Y0、Y1、Y2、Y3四个点的公共端为COM1(JP7-5);Y4、Y5、Y6三个点的公共端为COM2(JP7-9);Y7的公共端为COM3(JP8-1),Y8、Y9、Y10、Y11、Y12、Y13,Y14,Y15八个点的公共端为COM4(JP8-10),每个点的定义如下表所示:对于输入Xn,如果该输入点是常开信号,若此时Xn 对应的LED点亮,则Xn信号闭合。
如果该输入点是常闭的,平时此LED是点亮的,若该点动作,则LED 熄灭。
对于输出Yn,如果Yn发光LED点亮,说明对应的Yn输出点继电器吸合,即Yn输出了一个"ON"信号,如果Yn连接的是接触器或继电器,则该接触器或继电器的线圈通电。
1.4.5安全检测接口定义主控制器右下角的JP11端子,为安全回路和门锁回路的检测,110V电压输入端口,输入的电压可以是交流,也可以是直流,但输入直流时,一定应区分电压正负的接入,如安全回路的负端一定得接JP11.2,具体定义见下表:1.4.6 力矩补偿给定接口定义主控制器的JP23端子,为模拟负载补偿信号输出,具体定义见下表:1.4.7 编码器输入接口定义主控制器左上角为JP12端子,其中JP12的1至8脚为编码器输入接口,具体定义见下表:1.4.8 厅外呼梯开关输入端口主控制器右下角为JP9、JP10端子,为厅外呼梯开关的输入,具体定义见下表:1.4.9 呼梯点灯输出端口主控制器右下中间为JP13、JP14端子,为厅外呼梯指示灯,具体定义见下表:1.4.10 楼层指示输出端口主控制器右下角为JP15端子,为厅外楼层指示,兼容七段码驱动、格雷码驱动,BCD码或二进制码输出驱动,具体定义见下表:1.七段码驱动时定义如下:2.格雷码驱动时定义如下:3.BCD码或二进制码输出4.输出的公共端1.4.11 其它接口定义的说明DB1: 手持编程器接口,也可以做远程监控的接口,当作为手持编程器接口时,其手持式编程器,不仅能显示电梯速度、方向、状态,而且还能显示电梯的给定速度曲线和反馈速度曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
DSM8010位置控制器编码器控制模式 (2)
一、编码器控制模式 (2)
1、系统结构: (2)
2、方波计数器: (2)
3、RS232通讯配置电子齿轮的输入参数 (3)
4、输出参数 (3)
5、用DSM_Configured 配置脉冲方向模式 (4)
二、说明: (5)
1、频率/速度计算: (5)
2、因数限制: (5)
DSM8010位置控制器编码器控制模式
一、编码器控制模式
1、系统结构:
2、方波计数器:
DSM伺服控制系列DSM8010编码器控制模式3、RS232通讯配置电子齿轮的输入参数
名称索引子索引描述
数字位置缩放分子0×2300 0×02 缩放因子的分子。
电子齿轮中
用作降低输入频率
数字位置缩放分母0×2300 0×03 缩放因子的分子。
电子齿轮中
用作降低输入频率
数字位置极性 0×2300 0×04 极性 0 = 正向,1 = 负向
最小位置极限 0×607D 0×01 定义位置值的负向位置极限
最大位置极限 0×607D 0×02 定义位置值的正向位置极限
4、输出参数
名称索引子索引描述
期望位置数字值 0×2300 0×01 方波计数器的计数值,该值是基于
缩放因子与限位功能的输入脉冲数值。
实际位置数字值 0×6062 0×00 数值是脉冲方向模式基于缩放与限
位后功能后位置调节器输出的实际值
备注:
设置电子齿轮大于1,会导致很大的位置跳跃,而大的位置跳跃会产生很大的尖峰电流。
使用脉冲方向模式时,要关闭软件中的位置限制功能,最大位置设置INT32_MAX 和最小位置INT32_MIN的设置要屏蔽。
DSM伺服控制系列DSM8010编码器控制模式5、用DSM_Configured 配置脉冲方向模式
激活“DSM_Configure”界面下菜单“Parameter”中的“Save
Parameters”子菜单。
保存所有的参数。
*在使用脉冲和方向模式时,必须设置使能信号IN*1(Enable)数字输入口。
用来清除上电后的错误信息。
*使用准备信号“Ready”用来输出错误状态报告。
DSM伺服控制系列DSM8010编码器控制模式
在双轴系统的应用:
编码器控制模式在双轴系统中的典型应用。
首先是设定主轴,通过RS232或者CAN使能和发送命令使主轴工作在位置编程模式(Profile Position)或者速度编程模式(Profile Velocity)配置主轴的位置运动曲线。
从动轴工作在编码器模式下面,CAN总线接口只用来配置、监控和使能从动轴驱动器。
从动轴运行的状态就可以根据主轴编码器的数值计算得到。
注意:使用编码器模式时,DSM8010只能接收单端信号。
主动轴电机光电编码器信号的输出在接线端子上是差分信号,要添加线性接收器使差分信号转变成为单端信号之后才能连接到DSM8010的数字输入端。
二、说明:
1、频率/速度计算:
从动轴的速度和位置的计算与电子齿轮系数和从动轴电机的光电编码器分辨率有关系。
2、因数限制:
数字位置控制器DSM8010 可接收的最大步进输入频率是100KHz。