机器视觉大作业
《机器视觉与应用》大作业清单
《机器视觉与应用》大作业清单说明:每组应提交一份调研报告及相应的程序代码,演示录像或截图。
程序可使用C/C++/Matlab,如使用C/C++请包含完整的工程文件,IDE可使用VC6 ,VS2005,VS2008,CodeBlocks,可参考使用相关开源类库,如OpenCV,Matlab Image Processing Toolbox等。
提交时间:1月15日提交地址:ftp://202.120.50.201/user: MV09, password: MV09提交要求:大作业要有封面和目录(封面内容:参加人员姓名和学号,专业名称和时间)作业答疑:助教杨扬 [iyangyang186@]1.请查阅文献,对当前的人脸检测与识别(face detection and recognition)算法做调研,形成调研报告,包括当前有哪些流行的人脸检测与识别算法,各自的优缺点等,并注明参考文献。
写一个简单的人脸检测程序。
该程序可从本地硬盘读取一张图片(如JPG文件),用绿色框标识出检测到的人脸区域。
(宋晓辉、任振华、王玉珏)2.请查阅文献,对当前的人眼检测(eye/gaze detection)算法做调研,形成调研报告,包括当前有哪些流行的人眼检测算法,各自的优缺点等,并注明参考文献。
写一个简单的人眼检测程序。
该程序可从本地硬盘读取一张图片(如JPG文件),用绿色框标识出检测到的人眼区域。
(张卓贤、党东显、王建楼)3.请查阅文献,对当前的人体检测(body detection)算法做调研,形成调研报告,包括当前有哪些流行的人体检测算法,各自的优缺点等,并注明参考文献。
写一个简单的人体检测程序。
该程序可从本地硬盘读取一张图片(如JPG 文件),用曲线段标识出检测到的人体轮廓。
(金方进、杨帆、邱世广)4.请查阅文献,对当前的指尖检测(fingertip detection)算法做调研,形成调研报告,包括当前有哪些流行的指尖检测算法,各自的优缺点等,并注明参考文献。
西电计算机视觉大作业

一、引言
随着互联网广泛普及的应用,各种各样的数据资源包括文本、图片、音频、视频等放在网络服务器上供用户访问。但是这种网络资源的幵放也带了许多弊端,比如一些用户非法下载、非法拷贝、恶意篡改等,因此数字媒体内容的安全和因特网上的侵权问题成为一个急需解决的问题。数字水印作为一项很有潜力的解决手段,正是在这种情况下应运而生。
(2)噪声攻击下的提取
图3.2LSB噪声攻击下水印提取(左:高斯噪声,右:椒盐噪声)
通过实验结果,可以知道高斯噪声下提取的水印并没有在椒盐噪声下提取的清晰,但依然能够获取水印信息,说明LSB算法具备一定的抗噪效果。
(3)剪切攻击下的提取
剪切攻击是一种空间上的攻击手段,一般采用剪切嵌入水印图像的一部分,然后再利用残缺的图像来还原嵌入的信息。
图2.1两层多分辨率小波分解示意图
每一级分解都把图像分解为四个频带水平(HL)、垂直(LH)、对角(HH) 和低频,其中低频(LL)部分还可以进行下一级的分解,从而构成了小波的塔式分解。一幅图像经过分解之后,图像的主要能量主要集中于低频部分,图像的高频部分即图像的细节部分所含能量较少,分布在三个子图中,主要包含了原图的边缘和纹理部分信息。
彩色水印提取的具体步骤 :
(1)对嵌有水印的彩色图片降维得到RGB三个分量上的水印图片;
(2)对RGB三个分量上的水印图片在变换域进行分块提取;
(3)对水印图像进行重构,得到RGB三个分量上的水印图片;
(4)对得到的RGB三个分量上的水印图片进行合成得到彩色水印图片。
2.2.2、设计方法和实施过程
(1)水印的嵌入
图2.3 水印提取流程图
(3)攻击方式
1高斯噪声攻击
使用matlab自带函数:
计算机图像与机器视觉作业

第一部分文献翻译MITSUBISHI ELECTRIC RESEARCH LABORA TORIES三菱电子研究实验室Bethe free energy, Kikuchi approximations,and belief propagation algorithms贝特自由能量,菊池近似与BP算法AbstractThis is an updated and expanded version of TR2000-26, but it is still in draft form. Belief propagation (BP) was only supposed to work for tree-like networks but works surprisingly well in many applications involving networks with loops, including turbo codes. However, there has been little understanding of the algorithm or the nature of the solutions it finds for general graphs.摘要本文是TR2000-26版本的更新和扩展,但仍然是一个草案。
BP算法被认为只能在在树形网络中使用,但是却在别的应用领域如环形网络及Trubo码中表现十分优异。
然而,我们对于算法或者是解决一般问题的方法的本质知之甚少。
We show that BP can only converge to a stationary point of an approximate free energy, known as the Bethe free energy in statistical physics. This result characterizes BP fixed-points and makes connections with variational approaches to approximate Inference. 我们知道置信传播算法只能收敛到一个近似自由能量的固定点,在统计物理中被称为贝特自由能。
机器视觉大作业

Also called convolution (primarily in the frequency domain)
Spatial Filtering
The basic approach is to sum products between the mask coefficients and the intensities of the pixels under the mask at a specific location in the image:
Local Enhancement
When it is necessary to enhance details over smaller areas To devise transformation functions based on the graylevel distribution in the neighborhood of every pixel
Spatial Filtering
Use of spatial masks for image processing (spatial filters) Linear and nonlinear filters Low-pass filters eliminate or attenuate high frequency components in the frequency domain (sharp image details), and result in image blurring.
Local Enhancement
More procedure:
This function is finally used to map the gray level of the pixel centered in the neighborhood. The center is then moved to an adjacent pixel location and the procedure is repeated.
机器视觉及应用作业

《机器视觉及应用》课程作业一、数字图像处理1.两个图像子集S1和S2如下图所示。
对于V={1},确定这两个子集是(a)4邻接,(b)8邻接,还是(c)m邻接?解:对于V={1},子集S1是4邻接;而子集S2则是8邻接。
2.考虑如下所示的图像分割:(a)令V={0,1}并计算p到q间的4、8和m通路的最短长度。
如果在这两点间不存在特殊通路,请解释原因。
(b)对V={1,2}重复上题。
解:(a)①p到q之间,不存在4通路。
因为V={0,1}时,如图无法找到p、q之间的通路;②p到q之间的8通路最短长度如图最短长度为4+2√2;③p到q之间的m通路最短长度如图最短长度为6+√2;(b)对于V={1,2},容易得到:p、q之间4通路最短长度为8,8通路最短长度为4+2√2,m通路最短长度为8。
3.利用所学图像处理的知识,将下面全方位图像展开为普通图像。
我认为用到的是图像集合修正的知识,来处理这幅类似于几何失真的全方位图像。
首先,最主要的就是找到这幅图像的中心,这就需要利用相机的盲区(中心未拍摄到图像的黑色圆圈),求取图像的中心;(可以利用二值化后求中心的办法求得)然后,就是展开工作,以找到的中心作为极坐标中心,给图像各像素点一个极坐标;最后,通过一定的变换算法,如Houng变换(查找资料得到),对极坐标进行展开,最终获得普通图像。
最终经处理后得到的图片如图:4.图中的白条是7像素宽,210像素高。
两白条之间的宽度是17像素,当应用下面的处理时图的变化结果是什么?(1)分别用3×3、9×9均值滤波;(2)分别用3×3、9×9中值滤波。
答:(1)用3×3、9×9均值滤波,由于7>3/2,7>9/2,所以均值滤波时,滤波窗中白色像素点数>滤波窗中像素点数的一半,加上该图是二值图,灰度取值只有两个,所以说滤波前后图像不变;(2)用3×3、9×9中值滤波之后,图像中白色线条变窄,且两端变圆。
机器视觉作业

机器视觉作业机器视觉结课作业机器视觉系统的组成,及各组成部分的作⽤。
机器视觉就是⽤机器代替⼈眼来做测量和判断。
机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS 和CCD 两种)将被摄取⽬标转换成图像信号,传送给专⽤的图像处理系统,得到被摄⽬标的形态信息,根据像素分布和亮度、颜⾊等信息,转变成数字化信号;图像系统对这些信号进⾏各种运算来抽取⽬标的特征,进⽽根据判别的结果来控制现场的设备动作。
⼀个典型的机器视觉系统包括以下五⼤块:(1)照明照明是影响机器视觉系统输⼊的重要因素,它直接影响输⼊数据的质量和应⽤效果。
由于没有通⽤的机器视觉照明设备,所以针对每个特定的应⽤实例,要选择相应的照明装置,以达到最佳效果。
光源可分为可见光和不可见光。
常⽤的⼏种可见光源是⽩炽灯、⽇光灯、⽔银灯和钠光灯。
可见光的缺点是光能不能保持稳定。
如何使光能在⼀定的程度上保持稳定,是实⽤化过程中急需要解决的问题。
另⼀⽅⾯,环境光有可能影响图像的质量,所以可采⽤加防护屏的⽅法来减少环境光的影响。
照明系统按其照射⽅法可分为:背向照明、前向照明、结构光和频闪光照明等。
其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得⾼对⽐度的图像。
前向照明是光源和摄像机位于被测物的同侧,这种⽅式便于安装。
结构光照明是将光栅或线光源等投射到被测物上,根据它们产⽣的畸变,解调出被测物的三维信息。
频闪光照明是将⾼频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
(2)镜头FOV(Field Of Vision)=所需分辨率*亚象素*相机尺⼨/PRTM(零件测量公差⽐)镜头选择应注意:①焦距②⽬标⾼度③影像⾼度④放⼤倍数⑤影像⾄⽬标的距离⑥中⼼点/节点⑦畸变。
勿将⼯作距离与物体到像的距离混淆。
⼯作距离是从⼯业镜头前部到被观察物体之间的距离。
⽽物体到像的距离是CCD 传感器到物体之间的距离。
计算要求的⼯业镜头焦距时,必须使⽤⼯作距离(3)相机按照不同标准可分为:标准分辨率数字相机和模拟相机等。
(完整word版)湖北工业大学机器视觉作业
一、列举至少三种零件表面三维数据获取的方法。
针对其中一种,详细介绍其测量原理或方法。
1.接触式测量方法:坐标测量机、层析法。
2.非接触式测量方法:基于光学三角形原理的扫描法、基于相位偏移测量原理的莫尔条纹法、基于工业CT 断层扫描图像、立体视觉测量方法。
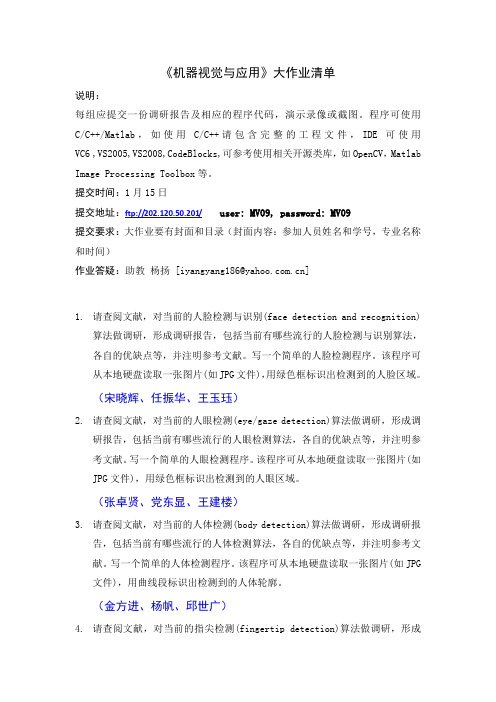
基于光学三角形原理的扫描法是以光作为光源,其结构模式可以分为光点、单线条、多光条等,将其投射到被测物体表面,并采用光电敏感元件在另一位置接受激光的反射能量,根据光点或光条在物体上成象的偏移,通过被测物体基平面、象点、象距等之间的关系计算物体的深度信息。
介绍一种使用激光的三角形测量法。
硬件由线激光发生器、CCD 摄像头、图像采集卡、相应的连接线与电源以及微型计算机组成。
如果采用两个参数完全相同的CCD 摄像头对称放置,可以减少测量盲区,提高测量精度。
三角形测量法利用基准面、像点、物距、像距等之间的关系计算物体的Z 坐标值。
图中, i —入射光 L —透镜N —成像屏, u —透镜L 的物距 v —透镜L 的像距O —L 光轴与入射光线i 的交点A —物面上的光点A ’,O ’分别是A 、O 的像点h —物面上光点相对于基准面的M 高度α—入射光线与光轴的夹角M ’—目标平面 M —参考平面根据透镜成像原理,以入射光与透镜光轴交点所在平面M 为基准面,则光点A 相对于基准面M 的高度h 的计算公式为:ααcos sin ’’h v h u h +•= 二、列举至少三种边缘提取算法,详述一种亚像素边缘提取算法的原理。
1.Roberts 边缘检测算子。
采用对角线方向相邻两像素之差近似梯度幅值检测边缘。
检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感。
2.Sobel 边缘算子。
是一组方向算子,从不同的方向检测边缘。
不是简单求平均值再差分,而是加强了中心像素上下左右四个方向像素的权重。
对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高,通常对灰度渐变和噪声较多的图像处理得较好。
计算机视觉基础大作业人脸识别

0壮叹汁算机视觉基础期末大作业题H:基于matlab的人脸识别系统设讣物联网工程学院计算机科学与技术专业学号学生姓名任课教师二O—六年六月目录摘要31.概述41.1人脸识别技术41.2人脸识别基本方法42.1儿何特征的人脸识别 42. 2基于特征脸(PCA)的人脸识别 4 2. 3神经网络的人脸识别 53人脸识别新技术 5人脸识别功能的实现 5 1 PCA 方法基本原理 5 2基于主成分分析法的人脸识别 62. 1读入人脸库 62.2计算K-L 变换的生成矩阵 6 2.3求解特征值和特征向量 7 2. 4样本投影与识别83基于PCA 算法人脸识别的matlab 实现 83. 1读取人脸库 83.2利用生成矩阵求特征值和特征向量 93. 3选取阈值提取训练样本特征 93. 4选取测试样本进行识别 91. 1. 1. 1.2. 2. 2. 2. 2. 2.2.2.2.2.2.2.2.2.5实验结果及分析11 4人脸识别代码102.5实验结果及分析113.实验结果及实现功能123. 1文件部分123.2图像预处理部分123. 3训练部分133. 4识别部分134.总结134.1人脸识别的困难性134. 1. 1相似性144.1.2易变性144.2实验心得14参考文献:14摘要人脸识别系统以人脸识别技术为核心,是一项新兴的生物识别技术,是当今国际科技领域攻关的高精尖技术。
这次设计主要是完成了基于主成分分析(PCA)方法的人脸识别,PCA方法的基本原理是:利用离散K-L变换提取人脸的主要成分,构成特征脸空间,识别时把测试样本投影到该空间,构成一组投影系数,通过与特征脸的距离比较,距离最小的特征脸对应的即是识别结果。
基于PCA的人脸识别其实一种统讣性的模板比配方法,原理简单,易于实现,但也有不足,它的识别率会随着关照,人脸角度,训练样本集的数量而变换,但仍不失为一种比较好的方法。
关键词:人脸识别、PCA、特征提取1.1人脸识别技术人脸识别技术是采用某种技术和手段对人的身份进行标识,从而依据该标识对人进行身份识别,以达到监督、管理和识别LI的的一种技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器视觉与图像处理大作业成绩评定表设计课题:基于机器视觉的表面缺陷检测技术学院名称:电气工程学院专业班级:自动F1205班学生姓名:学号:指导教师:设计时间: 2015.5.1-2015.5.8 指导教师意见:成绩:签名:年月日目次1 概述 (1)1.1 设计意义 (1)1.2 机器视觉与图像处理技术简介 (1)2 基于机器视觉的表面检测控制系统的总体设计 (2)2. 1 CCD摄像头 (3)2. 2图像采集卡 (3)2.2.1视频输入信号及采样频率 (4)2.2.2视频输入窗口和显示窗口 (4)2. 3软件设计 (4)3 表面缺陷检测软件设计 (5)3. 1图像实时采集模块 (5)3. 2图像预处理模块 (5)3.3 阈值选取模块 (6)3.4 图像测量模块与缺陷检测模块 (6)3.5 缺陷识别模块 (6)4 总结 (9)5 参考文献 (9)1 概述1.1 设计意义传统的人工检测产品表面质量的方法不仅工作量大,而且易受检测人员主观因素的影响,容易对产品表面缺陷造成漏检,尤其是变形较小、畸变不大的夹杂缺陷漏检,极大降低了产品的表面质量,从而不能够保证检测的效率与精度。
而发展迅速的基于机器视觉的表面缺陷检测技术可以很好的解决这一问题。
机器视觉主要是采用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。
基于机器视觉技术的缺陷检测系统,由于其非接触检测测量,具有较高的准确度、较宽的光谱响应范围,可长时间稳定工作,节省大量劳动力资源,极大地提高了工作效率。
可对工件表面的斑点、凹坑、划痕、色差、缺损等缺陷进行检测。
所以,人工检测难以达到降低消耗、提高产品质量的目的,采用基于机器视觉的表面缺陷检测技术成为必需。
这也就是设计该基于机器视觉的表面检测控制系统的意义。
1.2 机器视觉与图像处理技术简介图像处理技术简介:在机器视觉系统中,视觉信息的处理技术主要依赖于图像处理方法,它包括图像增强、数据编码和传输、平滑、边缘锐化、分割、特征抽取、图像灰度处理、小波处理、图像识别与理解等内容。
经过这些处理后,输出图像的质量得到相当程度的改善,既改善了图像的视觉效果,又便于计算机对图像进行分析、处理和识别。
机器视觉技术简介:机器视觉是将图像处理、计算机图形学、模式识别、计算机技术、人工智能等众多学科高度集成和有机结合,而形成的一门综合性的技术。
一般地说,机器视觉是研究计算机或其他处理器模拟生物宏观视觉功能的科学和技术,也就是用机器代替人眼来做测量和判断。
机器视觉系统如图图1-1 机器视觉系统构成机器视觉系统的特点是提高生产的柔性和自动化程度。
在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
而且机器视易于实现信息集成,是实现计算机集成制造的基础技术。
因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。
2 基于机器视觉的表面检测控制系统的总体设计该系统是由CCD 摄像头、照明系统、图像采集卡、机械装置、主控计算机等部件组成,图3-1为系统结构图。
其工作过程是:首先将工件送到CCD 摄像头视场内;然后由成像系统和图像采集卡将图像采集到计算机内部;运用图像处理技术对采集到的原始图像进行预处理以改善图像质量,从中提取感兴趣的特征量;最后运用模式识别技术对取到得特征量进行分类整理以完成系统的检测。
下面分别介绍系统的各部分的组成及工作原理。
成像系统光源主机视觉系统场景图像 描述反馈1 2 3 4 6 1、CCD 摄像头及照明系统 2、图像采集卡 3、主控计算机4、分类机构 5、工件 6、传送装置图2-1 机器视觉系统结构图2. 1 CCD 摄像头CCD 是一种半导体成像器件,具有灵敏度高、抗强光、畸变小、体积小、寿命长,抗震动等优点。
本系统采用的是国产MTV-1881EX 型号的黑白摄像头,它的工作方式是将被摄物体的图像经过镜头聚焦到CCD 芯片上,CCD 根据光的强弱积累相应比例的电荷,各个像素积累的电荷在视频时序的控制下,逐点外移,经视频捕捉卡滤波、放大处理,A/D 转换后形成视频信号输出。
2. 2图像采集卡本系统采用的是大恒PCI-XR 视频捕捉卡,具有高品质的视频采集性能,具备高速PCI 总线,采集频率为3D 帧/秒,显示画面流畅不间断;显示分辨率640X480。
动态捕捉影像以静态图像方式存盘,提供BMP ,JPG ,TIP ,TGA 等多种存盘格式。
其工作原理如图3-2所示:图3-2 VIDEO-PCI-XR 图像采集片工作原理四路复合视频输入经多路开关,软件选择其中一路作为当前输入,输出到A/D 进行模/数变换,数字化的图像信号经各种图像处理后,利用PCI 总线,传到V AG 卡显示或计算机内存存储。
由于要检测工件的两个表面,所以需要在硬件上使用两路视频输入,每路采集不同表面的图像。
采样频率在一定范围内可调,复合视频输入4复合视频输入1复合视频输入2 复合视频输入3 多路开关 多路开关滤波 滤波A/A/缓存缓存 PCI 总线VGA 显示系统内存满足不同场合的需求。
2.2.1视频输入信号及采样频率凡符合PAL制式(625行,50场/秒)和NTSC制式(525行,60场/秒)的视频设备输出的图像信号均可作为该视频捕捉卡的输入源。
在一般情况下,摄像机、录像机等视频设备均满足上述标准。
采样频率在一定范围内可调,满足不同场合的需求。
2.2.2视频输入窗口和显示窗口视频输入窗口是指数字化后的输入图像尺寸。
在PAL制式,输入窗口最大尺寸为768 X 576。
在NTCS制式为64 X 480。
图像显示窗口是指在V AG显示器上显示的图像尺寸,其最大值不能超过输入图像窗口。
当图像显示窗口小于视频输入窗口时,有两种方法可以采用。
一种方法是减少视频输入窗口的大小,即重新设置起始行、终止行、起始列、终止列。
使视频输入窗口与图像显示窗口相匹配。
处理后的结果显示的仅是全部输入图像的一个局部,这种方法称为裁剪。
另一种方法是采用对视频输入窗口采用抽点和抽行的方法减少其大小,即根据视频输入窗口和图像显示窗口的相对大小设置缩小比例系数,处理后的结果显示的是缩小的全部输入图像,这种方法称为比例缩小。
也可以将两种方法结合起来,达到所需要的结果。
2. 3软件设计本课题中的图像处理算法均采用Matlab程序语言实现模拟,Matlab提供一个高度集成的、集科学计算、程序设计和可视化归于一身的。
为了设计出实用有效的软件,必须按照软件工程的理论,进行充分的分阶段的分析和设计。
采用模块化结构设计,其特点为:1)可修改性。
对模块内部的修改,对模块外部没有影响;增加或删除几个模块,不影响整个程序;2)可读性。
每个模块意义和职责明确,模块间的接口关系清楚,便于用户和设计人员进行系统代码的维护;3)验证性。
独立于其它模块,可单独验证一个模块的正确性,便于进行调试。
采用模块化原理使软件结构清晰,容易阅读理解和维护。
本系统中,按照算法要求设计了各子程序。
3 表面缺陷检测软件设计由于本系统是一个完整、实时的缺陷检测系统,需要系统从原始图像采集到图像预处理、阈值选取、分割,再到模式识别,最后到缺陷种类分选整套过程有一个全面、整体的设计。
系统主要有以下几个模块:图像实时采集模块、图像预处理模块、阈值选取模块、图像测量模块、缺陷检测模块、缺陷识别模块,其过程如图4-1所示。
图3-1 缺陷检测过程3. 1图像实时采集模块为了准确、及时获得图像的当前状态,需要不断地通过图像采集卡将CCD摄像系统的图像信息直接读取到计算机内存,在计算机内存中进行其他的后续处理,如:图像滤波、图像测量、缺陷检测等等。
3. 2图像预处理模块为去掉噪声对图像的于扰,要将刚采集的图像数据进行预处理,如:去除孤立点、平滑、滤波等;同时,还要对图像进行灰度调整,增加对比度,为后续的图像处理工作做准备,如图4-2所示。
图3-2 原始图像及灰度调整后图像经过预处理后,图像的对比度增加,拉伸了图像灰度,表现在灰度直方图上图像实时采集模块缺陷识别模块 图像预处理模块缺陷检测模块阈值选取模块图像测量模块0 50 100 150 200 250直方图直方图像素值3000 25002000 1500 1000 5000 50 100 150 200 250像素值3000 25002000 1500 1000500就是峰与峰之间的距离加大,便于选取分割阈值及后续图像分割,如图4-3所示。
图3-3 灰度调整前及灰度调整后图像直方图3.3 阈值选取模块阈值的选取对于分割图像、提取缺陷信息至关重要,其方法也很多,本系统采取利用图像的灰度直方图来选取阈值,如图4-4所示。
图3-4 滤波前及滤波后的灰度直方图3.4 图像测量模块与缺陷检测模块用于实际实验获得实验数据,进而对图像处理。
3.5 缺陷识别模块经过以上处理,从原始图像中提取出了含有缺陷的图像信息,得到了目标缺陷。
为了把各种不同类型的目标缺陷分类,需要识别出它们之间的不同。
根据缺陷的形状信息,可以用一组描述特征来表示其特性。
选择区域描述特征,不但可以减少在区域中原始数据的数量,而且也有利于区别带有不同特性的区域。
同时,灰度值 直方图0 50 100 150 200 2500 50 100 150 200 250直方图像素值6000 5000 40003000 2000 1000像素值6000 5000 40003000 2000 1000 0灰度值这些描述特征对于目标缺陷大小的变化、旋转、平移是不变的。
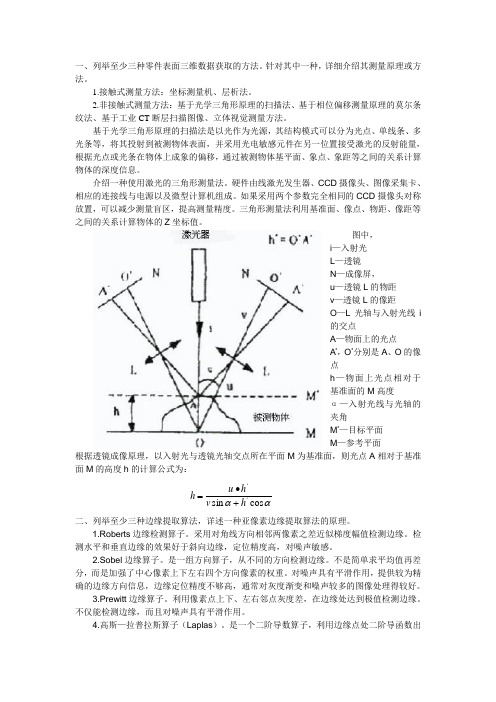
缺陷图像掉角其他缺陷麻坑掉角或麻坑刀纹、裂痕或划痕裂痕或划痕刀纹掉角图4-26 工件表面缺陷分类表示鉴于工件表面缺陷图像不同特征之间有一定的相关性,为降低识别算法的复杂性,特征识别时采用阶层识别的方法。
利用二叉树线性分类器,如图4-26所示,逐层选用不同的描述特征,选择描述特征的准则是同种特征值相差最明显的,保证描述特征具有较大相互独立性。
描述特征的分类阈值由实验分析和特征分析结果得到,具体过程如下所述。
图4-27 圆度判断(1)圆度判断圆度判断主要是针对掉角的缺陷,根据工件的特性,如图4-27所示,我们采取的方法:首先遍历圆周,因为背景的灰度值是很低的,可以比较容易将工件和背景分割开,提取出工件的外形;然后计算圆周上各点到圆心的距离,并和半径比较,如果比半径小于某一个设定值时,认为该点不在圆周上,如果这样的点连续而它们个数超过掉角缺陷的设定值时,可以认为这个工件是不圆的。
如图0 20 40 60 80 100圆度判断弧度X100+10 20 40 60 80 100工件外圆200 180 160 140120 100 80 60 40 20弧度X100+1圆度判断工件外圆200 180 160 140120100 80 60 40 204-28所示,半径的值并不是一条直线,而是一条曲线,甚至有些地方有凹沟,这表明工件本身不圆。