机器视觉及工程应用matlab实例分析
MATLAB机器视觉工具箱的使用指导
MATLAB机器视觉工具箱的使用指导一. 简介近年来,随着人工智能技术的快速发展,机器视觉成为了一个非常热门的领域。
而MATLAB作为一款强大的科学计算软件,提供了丰富的机器视觉工具箱,使得开发者能够更加便捷地实现各种视觉任务。
本文将带领读者逐步了解和学习MATLAB机器视觉工具箱的使用方法。
二. 图像处理图像处理是机器视觉的基础,MATLAB机器视觉工具箱提供了一系列用于图像处理的函数。
其中包括图像读取、图像显示、图像增强、图像分割等功能。
图像读取:使用imread函数可以读取各种格式的图像文件,并将其转化为MATLAB中的图像对象。
例如:```matlabim = imread('image.jpg');```图像显示:使用imshow函数可以将图像显示在MATLAB的图像窗口中,方便用户查看和分析图像。
例如:```matlabimshow(im);```图像增强:图像增强可以改善图像的质量和清晰度,常用的方法包括灰度转换、直方图均衡化等。
MATLAB提供了丰富的图像增强函数,例如:```matlabimgray = rgb2gray(im); % 灰度转换imhisteq = histeq(imgray); % 直方图均衡化```图像分割:图像分割是指将图像分成若干个具有特定意义的区域,常用的方法包括阈值分割、边缘检测等。
MATLAB提供了多种图像分割函数,例如:```matlabimbin = imbinarize(imgray, threshold); % 阈值分割imedge = edge(imgray, 'sobel'); % 边缘检测```三. 物体检测物体检测是机器视觉中的重要任务之一,MATLAB机器视觉工具箱提供了多种物体检测算法,能够帮助开发者实现准确且高效的物体检测。
目标检测:MATLAB提供了多个用于目标检测的函数,包括CascadeObjectDetector、trainCascadeObjectDetector等。
基于matlab的视觉传感标定实验

基于matlab的视觉传感标定实验
1.收集标定板图像:使用相机拍摄一系列标定板图像,尽量涵盖整个视野范围,并确保标定板在不同位置和角度下都能得到良好的图像。
2.提取角点:使用MATLAB的图像处理工具箱,例如corner函数,从标定板图像中提取角点的像素位置。
3.计算相机参数:使用MATLAB的相机标定工具箱,例如Camera Calibration Toolbox,根据提取到的角点像素位置和已知的标定板的实际尺寸,计算相机的内参数(例如焦距、光心等)和外参数(例如相机的位置和方向)。
4.评估标定结果:使用MATLAB的评估工具,例如reprojectionErrors函数,对标定结果进行评估,以确定相机标定的准确度。
5.应用标定结果:根据得到的相机参数,将标定结果应用于后续的图像处理或计算机视觉任务中,例如图像校正、三维重建、目标检测等。
Matlab中的机器视觉技术简介

Matlab中的机器视觉技术简介近年来,随着人工智能的快速发展,机器视觉技术得到了广泛的应用。
在这一领域中,Matlab作为一种强大的数学软件和编程平台,为研究者和工程师们提供了许多有用的工具和函数。
本文将介绍Matlab中的机器视觉技术,并讨论其在各个领域中的应用。
第一部分:Matlab中的图像处理和分割技术在机器视觉中,图像处理和分割是最基础而重要的步骤之一。
Matlab提供了各种用于图像处理和分割的函数,包括滤波、边缘检测、二值化等。
其中,最常用的是图像滤波技术,可以通过高斯滤波、中值滤波等方法去除图像中的噪声,从而提高后续处理的准确性;边缘检测技术可以提取图像中的轮廓信息,用于物体识别和目标追踪;而二值化技术可以将图像分为黑白两部分,便于后续的形状分析和对象提取。
第二部分:Matlab中的特征提取和描述技术在机器视觉中,特征提取和描述是识别和匹配任务的关键。
Matlab提供了许多用于特征提取和描述的函数,例如Harris角点检测、SIFT特征提取等。
这些函数可以提取出图像中的关键点和特征描述子,用于匹配和识别。
其中,Harris角点检测算法通过计算图像中每个像素的角点响应函数,识别出角点位置;而SIFT特征提取算法则通过检测局部极值点,并计算位置和方向不变性的描述子,提取出图像的关键点。
第三部分:Matlab中的目标检测和跟踪技术在机器视觉中,目标检测和跟踪是应用最广泛的领域之一。
Matlab提供了一系列用于目标检测和跟踪的函数和工具箱,例如基于Haar特征的级联分类器和MeanShift跟踪算法等。
这些工具可以通过训练分类器来检测和跟踪图像中的目标,在人脸识别、车辆跟踪等领域发挥重要作用。
其中,Haar特征通过计算图像中不同位置和大小的矩形区域的特征值,构建分类器,并通过级联的方式提高分类的准确率;而MeanShift跟踪算法则通过计算目标的颜色直方图,并使用优化算法迭代地寻找颜色分布最大的区域,实现目标的跟踪。
使用Matlab进行光学图像处理和计算机视觉

使用Matlab进行光学图像处理和计算机视觉在当今数字化时代,光学图像处理和计算机视觉已成为科学研究和工程应用中不可或缺的重要领域。
随着现代科技的快速发展,计算机视觉在人们的日常生活中发挥着越来越重要的作用。
而Matlab作为一种强大的科学计算软件,具备优秀的图像处理和计算机视觉功能,被广泛应用于这一领域。
光学图像处理是指通过光学器件、传感器或电子设备等将外界的光信号转换为数字图像,并对该图像进行各种处理和分析。
首先,在图像处理的前期工作中,我们需要对图像进行预处理。
在Matlab中,可以利用图像增强、滤波和去噪等技术对图像的质量进行提升。
例如,可以通过对比度增强、直方图均衡化和锐化等方法提高图像的清晰度和视觉效果。
同时,利用滤波器对图像进行去噪处理,可以有效消除由于图像采集和传输过程中引入的噪声,提高图像的信噪比。
接下来,在图像处理的中期工作中,我们可以利用Matlab提供的函数和工具箱进行图像分割和特征提取。
图像分割是将图像分解为多个具有相似特征的区域的过程,常用的方法包括阈值分割、边缘检测和区域生长等。
通过图像分割,我们可以将图像中的目标物体从背景中提取出来,为后续的目标检测、跟踪和识别等任务提供支持。
而图像特征提取则是从图像中提取出具有区分度的特征信息,通常包括颜色、纹理、形状和边缘等。
利用这些特征,可以实现对图像中目标物体的识别和分类。
最后,在图像处理的后期工作中,我们可以利用Matlab提供的函数和工具箱进行图像重建和图像合成。
图像重建是指通过一系列的数学和物理模型,对已知图像进行恢复或重建的过程。
例如,通过利用MATLAB中提供的反卷积算法,可以对由于传感器或光学系统等原因引起的图像模糊进行修复。
同时,图像合成是将不同来源的图像进行融合和合成的过程。
例如,通过融合可见光图像和热红外图像,可以实现对夜间目标的检测和识别。
除了光学图像处理,计算机视觉也是一个快速发展的研究领域。
计算机视觉通过模仿人类的视觉系统,利用计算机对数字图像和视频进行分析和理解。
Matlab在工业控制中的应用案例

Matlab在工业控制中的应用案例一、引言工业控制是指利用自动化技术对工业过程进行监测、测量和调节,以实现生产过程的优化和自动化。
在工业控制中,Matlab作为一种强大的数学软件和编程环境,被广泛应用于设计、分析和优化各种控制系统。
本文将介绍几个Matlab在工业控制中的成功应用案例,展示其在提高生产效率、优化产品质量以及降低生产成本方面的巨大潜力。
二、Matlab在机器人控制中的应用机器人在工业生产中扮演着越来越重要的角色,其控制系统的设计和优化对于提高生产效率至关重要。
Matlab提供了丰富的机器人控制工具箱,可以用于实现机器人的运动控制、路径规划以及力学建模等。
例如,在某汽车制造厂中,利用Matlab开发了一套针对焊接机器人的控制系统。
该系统利用Matlab的机器人工具箱进行轨迹规划和动力学仿真,实现了焊接过程的精确控制和优化。
三、Matlab在过程控制中的应用过程控制是指对化工、电力、冶金等工业过程的监控和调节,以保证产品的质量和工艺的稳定性。
Matlab提供了强大的信号处理、统计分析以及模型预测控制工具箱,在过程控制中具有广泛的应用。
例如,在某化工厂中,使用Matlab开发了一套基于模型预测控制(MPC)的系统。
该系统利用Matlab的MPC工具箱对过程进行建模和优化,实时预测过程的动态行为并调整控制参数,从而大大提高了产品的品质和生产效率。
四、Matlab在智能仪表控制中的应用智能仪表控制是指利用传感技术和智能算法,对工业仪表进行监控和自动调节。
Matlab提供了丰富的图像处理、模式识别以及优化算法,可以用于智能仪表控制系统的设计和优化。
例如,在某化工厂的管道网络系统中,使用Matlab开发了一套智能泄漏检测系统。
该系统利用Matlab的图像处理和模式识别工具箱,对管道网络中的泄漏进行实时监测和识别,从而及时采取措施避免事故的发生。
五、Matlab在电力系统控制中的应用电力系统的稳定与安全是保障电网正常运行的关键。
2024 机器视觉与控制 matlab
2024 机器视觉与控制 matlab2024年机器视觉与控制方面的Matlab应用机器视觉和控制是现代科学技术领域的重要研究方向。
随着人工智能和物联网技术的发展,机器视觉和控制在许多领域的应用越来越广泛。
Matlab作为一种强大的数学软件工具,在机器视觉和控制领域也得到了广泛的应用。
它提供了丰富的图像处理、图像分析和图像识别的函数库,可以进行各种图像处理操作,如滤波、二值化、边缘检测、特征提取等。
此外,Matlab还提供了强大的矩阵运算功能,可以方便地进行机器学习和模式识别算法的开发与实现。
在机器视觉方面,Matlab可用于开发和实现各种图像识别算法。
例如,可以利用Matlab的图像处理函数库进行目标检测与跟踪,识别和检测出图像中的目标物体,并实时跟踪其位置和运动轨迹。
此外,Matlab还提供了强大的机器学习功能,例如支持向量机、神经网络和深度学习等算法,可以用于训练和优化模型,提高图像识别的准确性和鲁棒性。
在控制方面,Matlab可用于设计和分析各种控制系统。
利用Matlab的控制工具箱,可以进行传统的PID控制器设计、线性和非线性系统的稳定性分析、系统模型的标识与辨识等。
此外,Matlab还支持基于状态空间和频域方法的控制器设计与分析,例如模糊控制、自适应控制和预测控制等。
综上所述,2024年机器视觉与控制方面的Matlab应用将进一步拓展与深化。
随着硬件技术的不断进步和机器学习算法的不断发展,Matlab将在机器视觉和控制领域发挥越来越重要的作用,为科学研究和工程应用提供强大的工具支持。
另外,在2024年机器视觉与控制方面的Matlab应用中,也将会涉及到新的技术和研究方向。
一方面,深度学习将成为机器视觉和控制领域的重要研究方向。
深度学习算法,特别是卷积神经网络(CNN)在图像处理和物体识别方面取得了巨大的成功。
Matlab将会提供更加高效和便捷的工具和函数来支持深度学习的应用。
例如,可以利用Matlab的深度学习工具箱进行图像分类、目标检测和图像生成等任务。
MATLAB工程应用实例
第3章MATLAB工程应用实例MATLAB在工程上的应用广泛,例如机械机构优化分析、机械控制、通信、数值计算等,MATLAB因其强大的数据处理能力,逐渐成为工程应用领域主导辅助工具。
本章主要应用MATLAB解决简单的工程问题,例如光反射定理、质点系转动惯量、人吸烟摄入有毒成分含量、冰雹下落模型的求解等,这类问题的优化求解对解决复杂的工程问题有着一定的参考价值,并能够提高结合MATLAB求解实际问题的能力。
学习目标:(1)熟练掌握MATLAB编程表示方法;(2)熟练运用MATLAB求解实际物理模型;(3)熟练掌握使用MATLAB工具解决简单工程问题等。
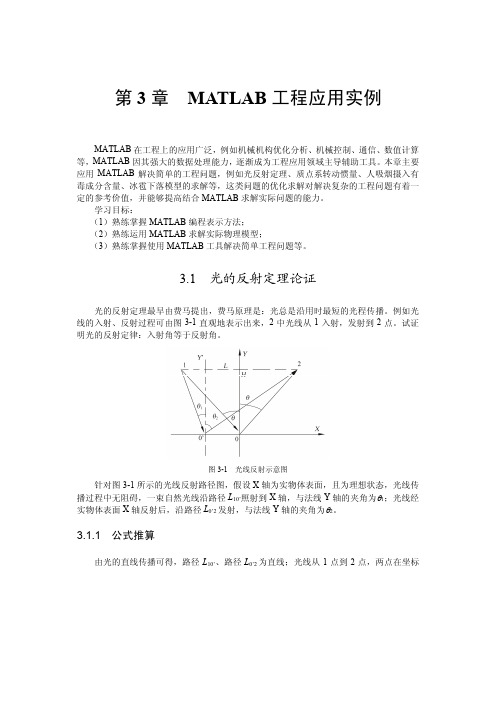
3.1 光的反射定理论证光的反射定理最早由费马提出,费马原理是:光总是沿用时最短的光程传播。
例如光线的入射、反射过程可由图3-1直观地表示出来,2中光线从1入射,发射到2点。
试证明光的反射定律:入射角等于反射角。
图3-1 光线反射示意图针对图3-1所示的光线反射路径图,假设X轴为实物体表面,且为理想状态,光线传播过程中无阻碍,一束自然光线沿路径L10’照射到X轴,与法线Y轴的夹角为θ1;光线经实物体表面X轴反射后,沿路径L0’2发射,与法线Y轴的夹角为θ2。
3.1.1 公式推算由光的直线传播可得,路径L10’、路径L0’2为直线;光线从1点到2点,两点在坐标·38·轴上的竖直方向上的投影相等,且为H ;光在空气中传播的速度为光线在真空中传播的速度C ;光线从1点到2点,1点与2点之间的距离为定值L ;光线经L 10’、L 0’2,所需时间为T 。
则光线从L 10’到L 0’2,所需时间为:10021212cos cos 11cos cos H HL L H T C C C C C θθθθ''⎛⎫=+=+=+ ⎪⎝⎭(3.1)其中,()120,90θθ∈︒︒、;又1点与2点之间的距离为定值L ,则可得到:()12=tan tan L H θθ+ (3.2)设LK =H,则12tan tan K θθ+= (3.3) 由三角代换变形得到:()1/2221cos 1tan K θθ-⎡⎤=+-⎣⎦代入(3.1)式得到:()1/2211211111tan cos cos cos H H T K C C θθθθ⎛⎫⎛⎫⎡⎤=+=++-⎣⎦ ⎪ ⎪⎝⎭⎝⎭(3.4) 对上式求一阶导数得到:()()1111/22211sin 2tan cos '2cos 1tan K H T C K θθθθθ⎧⎫+--⎪⎪⎪⎪=⎨⎬⎡⎤+-⎪⎪⎣⎦⎪⎪⎩⎭× (3.5) 因函数时间T 有极小值,令T '=0,整理结果可得下式:1tan 2Kθ= (3.6)此时,将上式代入(3.3)式得到:21tan tan 2Kθθ== (3.7)从而有:12θθ= (3.8) 由(3.8)式可得:入射角等于反射角,即结果成立。
MATLAB应用实例分析例分析

MATLAB应用实例分析例分析Matlab应用例题选讲仅举一些运用MATLAB的例子,这些问题在数学建模中时常遇到,希望能帮助同学们在短时间内方便、快捷的使用MATLAB 解决数学建模中的问题,并善用这一工具。
常用控制命令:clc:%清屏; clear:%清变量; save:%保存变量; load:%导入变量一、利用公式直接进行赋值计算本金P以每年n次,每次i%的增值率(n与i的乘积为每年增值额的百分比)增加,当增加到r×P 时所花费的时间T为:(利用复利计息公式可得到下式) lnrnT() r,P,P(1,0.01i),T,r,2,i,0.5,n,12nln(1,0.01i)MATLAB 的表达形式及结果如下:>> r=2;i=0.5;n=12; %变量赋值>> T=log(r)/(n*log(1+0.01*i)) 计算结果显示为:T = 11.5813即所花费的时间为T=11.5813 年。
分析:上面的问题是一个利用公式直接进行赋值计算问题,实际中若变量在某个范围变化取很多值时,使用MATLAB,将倍感方便,轻松得到结果,其绘图功能还能将结果轻松的显示出来,变量之间的变化规律将一目了然。
若r在[1,9]变化,i在[0.5,3.5]变化;我们将MATLAB的表达式作如下改动,结果如图1。
r=1:0.5:9;i=0.5:0.5:3.5;n=12;p=1./(n*log(1+0.01*i));T=log(r')*p;plot(r,T)xlabel('r') %给x轴加标题ylabel('T') %给y轴加标题q=ones(1,length(i));text(7*q-0.2,[T(14,1:5)+0.5,T(14,6)-0.1,T(14,7)-0.9],num2str(i'))40350.5302520T 1151.510 22.55 33.50123456789r图11从图1中既可以看到T随r的变化规律,而且还能看到i的不同取值对T—r 曲线的影响(图中的六条曲线分别代表i的不同取值)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
clear all;clc;%RGB分量显示(如图1所示)I=imread('C:\Users\bjut\Desktop\机器视觉\北工大.jpg');%读取图片R=I(:,:,1);%图片中的红色元素存在R中G=I(:,:,2);%图片中的绿色元素存在G中B=I(:,:,3);%图片中的蓝色元素存在H中figure(1)subplot(2,2,1);%生成2*2个子图,当前激活第1个子图imshow(I);%显示图片title('原始图像');%图片标题subplot(2,2,2);%生成2*2个子图,当前激活第2个子图imshow(R);%显示图片title('R分量图像');%图片标题subplot(2,2,3);%生成2*2个子图,当前激活第3个子图imshow(G);%显示图片title('G分量图像');%图片标题subplot(2,2,4);%生成2*2个子图,当前激活第4个子图imshow(B);%显示图片title('B分量图像');%图片标题图1 RGB分量显示%彩色直方图均衡化(如图2)R1=histeq(R);%对各分量直方图均衡化,得到各分量均衡化图像G1=histeq(G);B1=histeq(B);I1=cat(3,R,G,B);%创建三维矩阵,R为第一页,G为第二页,B为第三页HSV=rgb2hsv(I);%RGB转换成HSVV=HSV(:,:,3);V=histeq(V);%直方图均衡化HSV(:,:,3)=V;%明亮度调节I2=hsv2rgb(HSV); %HSV转换成RGBfigure(2);%显示图像subplot(1,2,1);imshow(I1);title('RGB各分量均衡化');subplot(1,2,2);imshow(I2);title('V分量均衡化');图2 彩色直方图均衡化%灰度图像伪彩色处理(如图3(a))I=imread('C:\Users\bjut\Desktop\机器视觉\北工大灰度.jpg'); figure(3);imshow(I);title('灰度图像');I=im2double(I);%图像数据转换成double型[W,H]=size(I);R=zeros(W,H);G=zeros(W,H);B=zeros(W,H);L=1;%设置色彩变换函数for i=1:Wfor j=1:Hif(I(i,j)>=L/2 &&I(i,j)<=3*L/4)R(i,j)=4*(I(i,j)-L/2);%R分量变换函数elseif I(i,j)>3*L/4R(i,j)=1;endif I(i,j)<=L/4G(i,j)=4*I(i,j);%G分量变换函数elseif I(i,j)>=3*L/4G(i,j)=1;endif I(i,j)<=L/4B(i,j)=1;%B分量变换函数elseif I(i,j)>3*L/4&&I(i,j)<=L/2B(i,j)=-4*(I(i,j)-L/2);endendendJ=cat(3,R,G,B);figure(3);imshow(J);title('伪彩色图像');%彩色图像取反(如图3(b))K=imread('C:\Users\bjut\Desktop\机器视觉\北工大灰度.jpg');IK=255-K;%图像取反figure(4);%图片显示subplot(1,2,2);imshow(IK);title('取反图像');(a)(b)图3 灰度图像伪彩色处理和彩色图像取反%图像饱和度调整N=imread('C:\Users\bjut\Desktop\机器视觉\北工大.jpg');HSV=rgb2hsv(N);%RGB转化成HSVS=HSV(:,:,2);%饱和度调整S1=S*2;d=find(S1>1.0);S1(d)=1.0;%饱和度乘上系数2S2=S*0.5;%饱和度乘上系数0.5HSV(:,:,2)=S1;RGB1=hsv2rgb(HSV);%HSV转化成RGBHSV(:,:,2)=S2;RGB2=hsv2rgb(HSV);%HSV转化成RGBfigure(5);%显示图片subplot(1,2,1);imshow(RGB1);title('饱和度乘上系数2');subplot(1,2,2);imshow(RGB2);title('饱和度乘上系数0.5');图4 图像饱和度调整%图像分割(如图5)Q=imread('C:\Users\bjut\Desktop\机器视觉\北工大.jpg');[M,N,t]=size(Q);I1=Q;I2=Q;for i=1:Mfor j=1:Nif I(i,j,1)>210&&I(i,j,2)>210&&I(i,j,3)>210I1(i,j,1)=255;%设置分割函数I1(i,j,2)=255;I1(i,j,3)=255;I2(i,j,1)=255;I2(i,j,2)=0;I2(i,j,3)=0;elseI1(i,j,1)=255;I1(i,j,2)=0;I1(i,j,3)=0;endendendfigure(6);%显示图像subplot(131);imshow(Q);title('原始图像');subplot(132);imshow(I1);title('分割区域');subplot(133);imshow(I2);title('分割之后');图5 图像分割%高通滤波(如图6)GT=imread('C:\Users\bjut\Desktop\机器视觉\北工大.jpg');%读取RGB图像GT=rgb2gray(GT);%灰度处理subplot(1,2,1);%显示原图imshow(GT);title('原始图像');f=double(GT);%数据类型转换k=fft2(f);%傅里叶变换g=fftshift(k);[M,N]=size(g);nn=2;%二阶巴特沃斯高通滤波d0=25;%截止频率为25m=fix(M/2);n=fix(N/2);for i=1:M%计算传递函数for j=1:Nd=sqrt((i-m)^2+(j-n)^2);if(d==0)h=0;elseh=1/(1+0.414*(d0/d)^2);endresult(i,j)=h*g(i,j);endendresult=ifftshift(result);J2=ifft2(result);J3=uint8(real(J2));figure(7)subplot(1,2,2);imshow(J3);title('高通滤波');图6 高通滤波%中值滤波去噪(如图7)ZZ=imread('C:\Users\bjut\Desktop\机器视觉\北工大.jpg'); ZZ=imnoise(ZZ,'salt & pepper',0.04);%添加椒盐噪声subplot(1,2,1);imshow(ZZ);title('椒盐噪声图像');ZZ=rgb2gray(ZZ);%转换图像类型image=double(ZZ);[m,n]=size(ZZ);u=zeros(1,9);%进行中值滤波for i=2:m-1for j=2:n-1u(1)=image(i,j);u(2)=image(i,j+1);u(3)=image(i-1,j+1);u(4)=image(i-1,j);u(5)=image(i-1,j-1);u(6)=image(i,j-1);u(7)=image(i+1,j-1);u(8)=image(i+1,j);u(9)=image(i+1,j+1);for p=1:8for q=1:8-pif u(q)>u(q+1)k=u(q);u(q)=u(q+1);u(q+1)=k;endendendrimage(i,j)=u(5);endendsubplot(1,2,2);rimage=uint8(rimage);%转换成8位无符号整数imshow(rimage);title('中值滤波');图7 中值滤波去噪%低通滤波(如图8)DT=imread('C:\Users\bjut\Desktop\机器视觉\北工大.jpg'); DT=rgb2gray(DT);%灰度处理DT2=imnoise(DT,'salt & pepper',0.05);%叠加椒盐噪声subplot(1,2,1);imshow(DT2);title('噪声图像');f=double(DT2);%数据类型转换k=fft2(f);%傅里叶变换g=fftshift(k);[N1,N2]=size(g);n=2;%构造指数低通滤波器进行滤波d0=25;u0=round(N1/2);v0=round(N2/2);for i=1:N1for j=1:N2d=sqrt((i-u0)^2+(i-v0)^2);h=exp(-(d/d0)^n);y(i,j)=h*g(i,j);endendy=ifftshift(y);E1=ifft2(y);E2=uint8(real(E1));figure(9);%显示图像subplot(1,2,2);imshow(E2);title('低通滤波');图8 低通滤波。