潮流计算(matlab)实例计算
潮流计算(matlab)实例计算
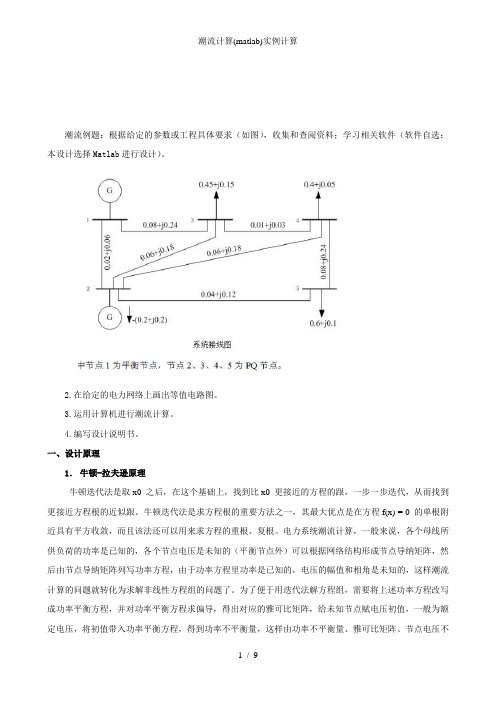
潮流例题:根据给定的参数或工程具体要求(如图),收集和查阅资料;学习相关软件(软件自选:本设计选择Matlab进行设计)。
2.在给定的电力网络上画出等值电路图。
3.运用计算机进行潮流计算。
4.编写设计说明书。
一、设计原理1.牛顿-拉夫逊原理牛顿迭代法是取x0 之后,在这个基础上,找到比x0 更接近的方程的跟,一步一步迭代,从而找到更接近方程根的近似跟。
牛顿迭代法是求方程根的重要方法之一,其最大优点是在方程f(x) = 0 的单根附近具有平方收敛,而且该法还可以用来求方程的重根、复根。
电力系统潮流计算,一般来说,各个母线所供负荷的功率是已知的,各个节点电压是未知的(平衡节点外)可以根据网络结构形成节点导纳矩阵,然后由节点导纳矩阵列写功率方程,由于功率方程里功率是已知的,电压的幅值和相角是未知的,这样潮流计算的问题就转化为求解非线性方程组的问题了。
为了便于用迭代法解方程组,需要将上述功率方程改写成功率平衡方程,并对功率平衡方程求偏导,得出对应的雅可比矩阵,给未知节点赋电压初值,一般为额定电压,将初值带入功率平衡方程,得到功率不平衡量,这样由功率不平衡量、雅可比矩阵、节点电压不平衡量(未知的)构成了误差方程,解误差方程,得到节点电压不平衡量,节点电压加上节点电压不平衡量构成新的节点电压初值,将新的初值带入原来的功率平衡方程,并重新形成雅可比矩阵,然后计算新的电压不平衡量,这样不断迭代,不断修正,一般迭代三到五次就能收敛。
牛顿—拉夫逊迭代法的一般步骤:(1)形成各节点导纳矩阵Y。
(2)设个节点电压的初始值U和相角初始值e 还有迭代次数初值为0。
(3)计算各个节点的功率不平衡量。
(4)根据收敛条件判断是否满足,若不满足则向下进行。
(5)计算雅可比矩阵中的各元素。
(6)修正方程式个节点电压(7)利用新值自第(3)步开始进入下一次迭代,直至达到精度退出循环。
(8)计算平衡节点输出功率和各线路功率2.网络节点的优化1)静态地按最少出线支路数编号这种方法由称为静态优化法。
matlab潮流计算仿真方法
matlab潮流计算仿真方法
MATLAB 是一种强大的编程语言和环境,可用于执行各种仿真和计算任务,包括电力系统潮流计算。
以下是一个简单的 MATLAB 潮流计算仿真方法的
示例:
1. 定义系统参数:首先,你需要定义电力系统的参数,如发电机、负荷、变压器等。
这些参数通常包括额定电压、额定功率、电抗、电阻等。
2. 建立系统模型:使用这些参数,你可以在 MATLAB 中建立电力系统的模型。
这通常涉及到定义节点和支路,以及为它们分配相应的参数。
3. 编写潮流计算函数:接下来,你需要编写一个用于执行潮流计算的函数。
这个函数应该能够接收系统的模型和参数,并返回计算出的潮流结果,如电压、电流、功率等。
4. 运行仿真:最后,你可以运行仿真并调用你编写的潮流计算函数。
这将返回计算出的潮流结果,你可以使用这些结果进行进一步的分析或可视化。
这只是一个简单的示例,实际上在编写 MATLAB 潮流计算仿真方法时可能
需要考虑更多因素,例如系统的约束条件、初始条件、迭代算法的收敛性等。
如果你需要具体的 MATLAB 代码示例或更详细的指导,我建议你查阅MATLAB 的官方文档或相关的教程和文献。
matpower潮流计算实例
matpower潮流计算实例matpower是一款用于电力系统潮流计算的软件包,它是基于MATLAB 开发的工具。
潮流计算是电力系统运行和规划中的重要任务,它用于分析电力系统中各节点的电压、功率和电流等参数的分布情况,以及各发电机和负荷之间的潮流分布情况。
matpower的使用非常灵活,可以用于不同规模和复杂度的电力系统潮流计算。
在进行潮流计算前,需要准备好电力系统的数据,包括发电机的参数、负荷的参数、输电线路的参数等。
matpower提供了丰富的函数和工具,可以方便地导入和处理这些数据。
潮流计算的目的是确定电力系统中各节点的电压和相角,以及各发电机和负荷的潮流分布情况。
通过潮流计算,可以评估电力系统的稳定性和可靠性,优化电力系统的运行和规划。
潮流计算的结果可以用于发电机的出力控制、负荷的调度、输电线路的优化等。
matpower提供了多种潮流计算算法,包括牛顿-拉夫森法、快速潮流法、直流潮流法等。
这些算法具有不同的适用范围和计算速度,用户可以根据具体情况选择合适的算法进行计算。
matpower还提供了丰富的可视化工具,可以直观地展示潮流计算的结果。
除了潮流计算,matpower还可以进行电力系统的稳定性分析、最优潮流计算、无功优化等。
这些功能使matpower成为了电力系统分析和优化的重要工具。
下面以一个简单的实例来介绍matpower的潮流计算功能。
假设有一个由3个节点、3台发电机和3个负荷组成的电力系统,节点之间通过输电线路相连。
我们希望计算出各节点的电压和相角,以及各发电机和负荷的功率和潮流分布情况。
我们需要准备好电力系统的数据。
发电机的参数包括发电机编号、发电机容量、发电机电压、发电机无功功率等。
负荷的参数包括负荷编号、负荷功率、负荷电压等。
输电线路的参数包括线路编号、起始节点、终止节点、线路阻抗等。
将这些数据整理成matpower所需的格式,并导入matpower。
接下来,我们可以使用matpower提供的潮流计算函数进行计算。
潮流计算matlab程序
clear;%各节点参数:节点编号,类型,电压幅值,电压相位,注入有功,注入无功%类型:1=PQ节点,2=PV节点,3=平衡节点%本程序中将最后一个节点设为平衡节点R_1=[1 1 1.0 0 0.2 0.2j;2 1 1.0 0 -0.45 -0.15j;3 1 1.0 0 -0.45 -0.05j;4 1 1.0 0 -0.6 -0.1j;5 3 1.0 0 0 0];%支路号首端节点末端节点支路导纳R_2=[1 5 2 1.25-3.75j;2 23 10.00-30.00j;3 34 1.25-3.75j;4 1 4 2.50-7.50j;5 1 5 5.00-15.00j;6 1 2 1.667-5.00j];n=5;L=6;%需要改变的到此为止i=0;j=0;a=0;precision=1;k=0;Y=zeros(n,n);u=zeros(1,n);delt=zeros(1,n);P=zeros(1,n);Q=zeros(1,n);G=[];B=[];PP=[];uu=[];U=[];dp=[];dq=[];for a=1:Li=R_2(a,2);j=R_2(a,3);Y(i,j)=-R_2(a,4);Y(j,i)=Y(i,j);endfor a=1:nfor b=1:nif a~=bY(a,a)=Y(a,a)+Y(a,b);endendendfor i=1:nfor j=1:nif i==jY(i,j)=-Y(i,j);endendendY %形成导纳矩阵for i=1:nfor j=1:nG(i,j)=real(Y(i,j));B(i,j)=imag(Y(i,j));endendfor a=1:nu(a)=R_1(a,3);P(a)=R_1(a,5);Q(a)=R_1(a,6);delt(a)=R_1(a,4);endwhile precision>0.0001 %判断是否满足精度要求for a=1:n-1for b=1:npt(b)=u(a)*u(b)*(G(a,b)*cos(delt(a)-delt(b))+B(a,b)*sin(delt(a)-delt(b)));qt(b)=u(a)*u(b)*(G(a,b)*sin(delt(a)-delt(b))-B(a,b)*cos(delt(a)-delt(b))); endpt,qtpi(a)=sum(pt);qi(a)=sum(qt); %计算PQ节点的注入功率dp(a)=P(a)-pi(a);dq(a)=Q(a)-qi(a); %计算PQ节点的功率不平衡量endfor a=1:n-1for b=1:n-1if a==bH(a,a)=-qi(a)-u(a)^2*B(a,a); N(a,a)=pi(a)+u(a)^2*G(a,a);J(a,a)=pi(a)-u(a)^2*G(a,a); L(a,a)=qi(a)-u(a)^2*B(a,a);JJ(2*a-1,2*a-1)=H(a,a); JJ(2*a-1,2*a)=N(a,a);JJ(2*a,2*a-1)=J(a,a); JJ(2*a,2*a)=L(a,a);elseH(a,b)=u(a)*u(b)*(G(a,b)*sin(delt(a)-delt(b))-B(a,b)*cos(delt(a)-delt(b)));J(a,b)=-u(a)*u(b)*(G(a,b)*cos(delt(a)-delt(b))+B(a,b)*sin(delt(a)-delt(b)));N(a,b)=-J(a,b);L(a,b)=H(a,b);JJ(2*a-1,2*b-1)=H(a,b);JJ(2*a-1,2*b)=N(a,b);JJ(2*a,2*b-1)=J(a,b); JJ(2*a,2*b)=L(a,b);endendend %计算jocbi各项,并放入统一矩阵JJ中,对JJ下标统一编号JJfor a=1:n-1PP(2*a-1)=dp(a);PP(2*a)=dq(a);end %按统一矩阵形成功率不平衡uu=inv(JJ)*PP';precision=max(abs(uu)); %判断是否收敛for b=1:n-1delt(b)=delt(b)+uu(2*b-1);u(b)=u(b)+uu(2*b)*u(b); %将结果分解为电压幅值和角度end %求解修正方程,得电压幅值变化量(标幺值)和角度变化量k=k+1;endfor a=1:nU(a)=u(a)*(cos(delt(a))+j*sin(delt(a)));endfor b=1:nI(b)=Y(n,b)*U(b);%求平衡节点的注入电流endS5=U(n)*sum(conj(I))%求平衡节点的注入功率for a=1:nfor b=1:nS(a,b)=U(a)*(conj(U(a))-conj(U(b)))*conj(-Y(a,b));endend %求节点i,j节点之间的功率,方向为由i指向j,S %显示支路功率。
基于MATLAB进行潮流计算
基于MATLAB进行潮流计算本文介绍了基于MATLAB软件的潮流计算方法。
电力系统潮流计算方法分为手算潮流和计算机潮流计算两类。
手算潮流主要适用于规模较小的辐射型电力潮流计算,而计算机潮流计算有两种途径:编程实现网络方程的迭代求解和借助电力系统分析仿真软件搭建系统模型完成潮流计算。
MATLAB具有强大的矩阵运算功能和电力系统仿真平台,可以为实现潮流计算提供更便捷的手段。
本文采用极坐标形式牛顿─拉夫逊法进行潮流计算,为其他形式的潮流计算提供借鉴。
Abstract: The power flow n method can be divided into two categories: hand n of tidal current and computer power flow XXX simplified equivalent circuits。
making it XXX: programming XXX ns。
or using power system XXX system model for power flow n。
MATLAB are has strong matrix ns and its power system XXX-Raphson method of power flow n in polar coordinates with MATLAB are。
and can serve as a reference for other forms of power flow n.1.电力系统中的牛顿法潮流计算是一种常用的电力系统分析方法。
该方法基于节点电压的相等条件和潮流方程的等式条件,通过迭代求解电压和相位的不平衡量,最终得到各节点的电压、相位和功率等参数。
2.牛顿法潮流计算的步骤包括输入系统原始数据、形成节点导纳矩阵、给定各节点电压初值、计算功率偏差向量、判断收敛条件、计算雅克比矩阵、解修正方程、计算节点电压和相位的修正值、迭代计算直至满足收敛条件、计算各节点功率等参数并输出计算结果。
用matlab电力系统潮流计算(课程设计)
4设计图及源程序4.1MATLAB仿真相关的原始数据输入格式如下:1、B1是支路参数矩阵,第一列和第二列是节点编号。
节点编号由小到大编写。
2、对于含有变压器的支路,第一列为低压侧节点编号,第二列为高压侧节点编号,将变压器的串联阻抗置于低压侧处理,第三列为支路的串列阻抗参数,第四列为支路的对地导纳参数,第五烈为含变压器支路的变压器的变比,第六列为变压器是否是否含有变压器的参数,其中“1”为含有变压器,“0”为不含有变压器。
3、B2为节点参数矩阵,其中第一列为节点注入发电功率参数;第二列为节点负荷功率参数;第三列为节点电压参数;第六列为节点类型参数,其中“1”为平衡节点,“2”为PQ节点,“3”为PV 节点参数。
4、X为节点号和对地参数矩阵。
其中第一列为节点编号,第二列为节点对地参数。
4.2潮流计算源程序close allclear alln=input('请输入节点数:n=');n1=input('请输入支路数:n1=');isb=input('请输入平衡节点号:isb=');pr=input('请输入误差精度:pr=');B1=input('请输入支路参数:B1=');B2=input('请输入节点参数:B2=');X=input('节点号和对地参数:X=');Y=zeros(n);Times=1; %置迭代次数为初始值%创建节点导纳矩阵for i=1:n1if B1(i,6)==0 %不含变压器的支路p=B1(i,1);q=B1(i,2);Y(p,q)=Y(p,q)-1/B1(i,3);Y(q,p)=Y(p,q);Y(p,p)=Y(p,p)+1/B1(i,3)+0.5*B1(i,4);Y(q,q)=Y(q,q)+1/B1(i,3)+0.5*B1(i,4);else %含有变压器的支路p=B1(i,1);q=B1(i,2);Y(p,q)=Y(p,q)-1/(B1(i,3)*B1(i,5));Y(q,p)=Y(p,q);Y(p,p)=Y(p,p)+1/B1(i,3);YOrgS=zeros(2*n-2,1);DetaS=zeros(2*n-2,1); %将OrgS、DetaS初始化%创建OrgS,用于存储初始功率参数h=0;j=0;for i=1:n %对PQ节点的处理if i~=isb&B2(i,6)==2h=h+1;for j=1:nOrgS(2*h-1,1)=OrgS(2*h-1,1)+real(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))+imag(B2(i,3))*(real(Y(i,j) )*imag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));OrgS(2*h,1)=OrgS(2*h,1)+imag(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))-real(B2(i,3))*(real(Y(i,j))*im ag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));endendendfor i=1:n %对PV节点的处理,注意这时不可再将h初始化为0if i~=isb&B2(i,6)==3h=h+1;for j=1:nOrgS(2*h-1,1)=OrgS(2*h-1,1)+real(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))+imag(B2(i,3))*(real(Y(i,j) )*imag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));OrgS(2*h,1)=OrgS(2*h,1)+imag(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))-real(B2(i,3))*(real(Y(i,j))*im ag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));endendendOrgS%创建PVU 用于存储PV节点的初始电压PVU=zeros(n-h-1,1);t=0;for i=1:nif B2(i,6)==3t=t+1;PVU(t,1)=B2(i,3);endend%创建DetaS,用于存储有功功率、无功功率和电压幅值的不平衡量h=0;for i=1:n %对PQ节点的处理if i~=isb&B2(i,6)==2h=h+1;DetaS(2*h-1,1)=real(B2(i,2))-OrgS(2*h-1,1);DetaS(2*h,1)=imag(B2(i,2))-OrgS(2*h,1);endendt=0;for i=1:n %对PV节点的处理,注意这时不可再将h初始化为0if i~=isb&B2(i,6)==3h=h+1;t=t+1;DetaS(2*h-1,1)=real(B2(i,2))-OrgS(2*h-1,1);DetaS(2*h,1)=real(PVU(t,1))^2+imag(PVU(t,1))^2-real(B2(i,3))^2-imag(B2(i,3))^2;endendDetaS%创建I,用于存储节点电流参数i=zeros(n-1,1);h=0;for i=1:nif i~=isbh=h+1;I(h,1)=(OrgS(2*h-1,1)-OrgS(2*h,1)*sqrt(-1))/conj(B2(i,3));endendI%创建Jacbi(雅可比矩阵)Jacbi=zeros(2*n-2);h=0;k=0;for i=1:n %对PQ节点的处理if B2(i,6)==2h=h+1;for j=1:nif j~=isbk=k+1;if i==j %对角元素的处理Jacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3))+imag(I(h,1));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3))+real(I(h,1));Jacbi(2*h,2*k-1)=-Jacbi(2*h-1,2*k)+2*real(I(h,1));Jacbi(2*h,2*k)=Jacbi(2*h-1,2*k-1)-2*imag(I(h,1));else %非对角元素的处理Jacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3));Jacbi(2*h,2*k-1)=-Jacbi(2*h-1,2*k);Jacbi(2*h,2*k)=Jacbi(2*h-1,2*k-1);endif k==(n-1) %将用于内循环的指针置于初始值,以确保雅可比矩阵换行k=0;endendendendendk=0;for i=1:n %对PV节点的处理if B2(i,6)==3h=h+1;for j=1:nif j~=isbk=k+1;if i==j %对角元素的处理Jacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3))+imag(I(h,1));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3))+real(I(h,1));Jacbi(2*h,2*k-1)=2*imag(B2(i,3));Jacbi(2*h,2*k)=2*real(B2(i,3));else %非对角元素的处理Jacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3));Jacbi(2*h,2*k-1)=0;Jacbi(2*h,2*k)=0;endif k==(n-1) %将用于内循环的指针置于初始值,以确保雅可比矩阵换行k=0;endendendendendJacbi%求解修正方程,获取节点电压的不平衡量DetaU=zeros(2*n-2,1);DetaU=inv(Jacbi)*DetaS;DetaU%修正节点电压j=0;for i=1:n %对PQ节点处理if B2(i,6)==2j=j+1;B2(i,3)=B2(i,3)+DetaU(2*j,1)+DetaU(2*j-1,1)*sqrt(-1);endendfor i=1:n %对PV节点的处理if B2(i,6)==3j=j+1;B2(i,3)=B2(i,3)+DetaU(2*j,1)+DetaU(2*j-1,1)*sqrt(-1);endendB2%开始循环**********************************************************************while abs(max(DetaU))>prOrgS=zeros(2*n-2,1); %!!!初始功率参数在迭代过程中是不累加的,所以在这里必须将其初始化为零矩阵h=0;j=0;for i=1:nif i~=isb&B2(i,6)==2h=h+1;for j=1:nOrgS(2*h-1,1)=OrgS(2*h-1,1)+real(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))+imag(B2(i,3))*(real(Y(i,j) )*imag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));OrgS(2*h,1)=OrgS(2*h,1)+imag(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))-real(B2(i,3))*(real(Y(i,j))*im ag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));endendendfor i=1:nif i~=isb&B2(i,6)==3h=h+1;for j=1:nOrgS(2*h-1,1)=OrgS(2*h-1,1)+real(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))+imag(B2(i,3))*(real(Y(i,j) )*imag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));OrgS(2*h,1)=OrgS(2*h,1)+imag(B2(i,3))*(real(Y(i,j))*real(B2(j,3))-imag(Y(i,j))*imag(B2(j,3)))-real(B2(i,3))*(real(Y(i,j))*im ag(B2(j,3))+imag(Y(i,j))*real(B2(j,3)));endendendOrgS%创建DetaSh=0;for i=1:nif i~=isb&B2(i,6)==2h=h+1;DetaS(2*h-1,1)=real(B2(i,2))-OrgS(2*h-1,1);DetaS(2*h,1)=imag(B2(i,2))-OrgS(2*h,1);endendt=0;for i=1:nif i~=isb&B2(i,6)==3h=h+1;t=t+1;DetaS(2*h-1,1)=real(B2(i,2))-OrgS(2*h-1,1);DetaS(2*h,1)=real(PVU(t,1))^2+imag(PVU(t,1))^2-real(B2(i,3))^2-imag(B2(i,3))^2;endendDetaS%创建Ii=zeros(n-1,1);h=0;for i=1:nif i~=isbh=h+1;I(h,1)=(OrgS(2*h-1,1)-OrgS(2*h,1)*sqrt(-1))/conj(B2(i,3));endendI%创建JacbiJacbi=zeros(2*n-2);h=0;k=0;for i=1:nif B2(i,6)==2h=h+1;for j=1:nif j~=isbk=k+1;if i==jJacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3))+imag(I(h,1));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3))+real(I(h,1));Jacbi(2*h,2*k-1)=-Jacbi(2*h-1,2*k)+2*real(I(h,1));Jacbi(2*h,2*k)=Jacbi(2*h-1,2*k-1)-2*imag(I(h,1));elseJacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3));Jacbi(2*h,2*k-1)=-Jacbi(2*h-1,2*k);Jacbi(2*h,2*k)=Jacbi(2*h-1,2*k-1);endif k==(n-1)k=0;endendendendendk=0;for i=1:nif B2(i,6)==3h=h+1;for j=1:nif j~=isbk=k+1;if i==jJacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3))+imag(I(h,1));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3))+real(I(h,1));Jacbi(2*h,2*k-1)=2*imag(B2(i,3));Jacbi(2*h,2*k)=2*real(B2(i,3));elseJacbi(2*h-1,2*k-1)=-imag(Y(i,j))*real(B2(i,3))+real(Y(i,j))*imag(B2(i,3));Jacbi(2*h-1,2*k)=real(Y(i,j))*real(B2(i,3))+imag(Y(i,j))*imag(B2(i,3));Jacbi(2*h,2*k-1)=0;Jacbi(2*h,2*k)=0;endif k==(n-1)k=0;endendendendendJacbiDetaU=zeros(2*n-2,1);DetaU=inv(Jacbi)*DetaS;DetaU%修正节点电压j=0;for i=1:nif B2(i,6)==2j=j+1;B2(i,3)=B2(i,3)+DetaU(2*j,1)+DetaU(2*j-1,1)*sqrt(-1);endendfor i=1:nif B2(i,6)==3j=j+1;B2(i,3)=B2(i,3)+DetaU(2*j,1)+DetaU(2*j-1,1)*sqrt(-1);endendB2Times=Times+1; %迭代次数加1endTimes。
Matlab实现潮流计算程序
程序代码如下:111111.%读入数据clcclearfilename='123.txt';a=textread(filename)n=a(1,1);pinghengjd=a(1,2);phjddianya=a(1,3);jingdu=a(1,4);b=zeros(1,9);j1=0;[m1,n1]=size(a);for i1=1:m1if a(i1,1)==0j1=j1+1;b(j1)=i1;endendb;%矩阵分块a1=a(b(1)+1:b(2)-b(1)+1,1:n1);a2=a(b(2)+1:b(3)-1,1:n1);a3=a(b(3)+1:b(4)-1,1:n1);a4=a(b(4)+1:b(5)-1,1:n1);a5=a(b(5)+1:b(6)-1,1:n1);%设置初值vcz=1;dcz=0;kmax=20;k1=0;%求节点导纳矩阵a11=zeros(4,6);for i0=1:3for j0=1:6a11(i0,j0)=a1(i0,j0);a11(4,j0)=a2(1,j0);endenda11;linei=a11(1:4,2);linej=a11(1:4,3);liner=a11(1:4,4);linex=a11(1:4,5);lineb=a11(1:4,6);branchi=0;branchj=0;branchb=0;G=zeros(4,4);B=zeros(4,4);for k=1:4i2=linei(k,1);j2=linej(k,1);r=liner(k,1);x=linex(k,1);b=0;GIJ=r/(r*r+x*x);BIJ=-x/(r*r+x*x);if k>=4 & lineb(k)~=0k0=lineb(k);G(i2,j2)=-GIJ/k0;G(j2,i2)=G(i2,j2);B(i2,j2)=-BIJ/k0;B(j2,i2)=B(i2,j2);G(i2,i2)=G(i2,i2)+GIJ/k0/k0; B(i2,i2)=B(i2,i2)+BIJ/k0/k0;elseG(j2,i2)=-GIJ;G(i2,j2)=G(j2,i2);B(j2,i2)=-BIJ;B(i2,j2)=B(j2,i2);G(i2,i2)=G(i2,i2)+GIJ;b=lineb(k);B(i2,i2)=B(i2,i2)+BIJ+b;endG(j2,j2)=G(j2,j2)+GIJ;B(j2,j2)=B(j2,j2)+BIJ+b;endG;B;B=B.*i;Yf=G+BY=abs(Yf);alf=angle(Yf);%赋Jacobian矩阵参数P=zeros(n,1);Q=zeros(n,1);Pd=zeros(1,n);Qd=zeros(1,n);dP=zeros(1,n);dQ=zeros(1,n);PG=a4(:,3);PD=a4(:,5);QG=a4(:,4);QD=a4(:,6);i8=a4(:,2);for j8=1:length(i8)P(i8(j8))=PG(i8(j8))-PD(i8(j8));Q(i8(j8))=QG(i8(j8))-QD(i8(j8));enddelt=zeros(n,1);V=ones(n,1);V(3)=1.10;V(4)=1.05;ddelt=zeros(n,1);dV=zeros(n,1);A=zeros(2*n,2*n);B=zeros(2*n,1);Jacobian=Jaco(V,delt,n,Y,alf)%求取矩阵功率for j5=1:kmaxdisp(['第' int2str(j5) '次计算结果'])if k>=kmaxbreakendfor i10=1:4Pd(i10)=0;Qd(i10)=0;for j10=1:nPd(i10)=Pd(i10)+V(i10)*Y(i10,j10)*V(j10)*cos(d elt(i10)-delt(j10)-alf(i10,j10));Qd(i10)=Qd(i10)+V(i10)*Y(i10,j10)*V(j10)*sin(d elt(i10)-delt(j10)-alf(i10,j10));endendfor i4=1:3dP(i4)=P(i4)-Pd(i4);endfor j4=1:2dQ(j4)=Q(j4)-Qd(j4);endA=Jaco(V,delt,n,Y,alf)for i14=1:nB(i14*2-1)=-dP(i14);B(i14*2)=-dQ(i14);endif max(abs(B))>jingduX=A\B;for i16=1:nddelt(i16)=X(2*i16-1);dV(i16)=X(2*i16)*V(i16);endV=V+dVdelt=delt+ddeltelsebreakenddisp('----------------')end%流氓算法% for ii=1:2% V(ii)=V(ii)+dV(ii);% end% V222222.function A=Jaco(V,delt,n,Y,alf)%计算Jacobian矩阵for i7=1:nHd1(i7)=0;Jd1(i7)=0;for j7=1:nHd1(i7)=Hd1(i7)+V(i7)*Y(i7,j7)*V(j7)*sin(delt(i7)-delt(j7)-alf(i7,j7));Jd1(i7)=Jd1(i7)+V(i7)*Y(i7,j7)*V(j7)*cos(delt(i7)-delt(j7)-alf(i7,j7));endendfor i6=1:nfor j6=1:nif i6~=j6H(i6,j6)=-V(i6)*Y(i6,j6)*V(j6)*sin(delt(i6)-delt(j6)-alf(i6,j6));N(i6,j6)=-V(i6)*Y(i6,j6)*V(j6)*cos(delt(i6)-delt(j6)-alf(i6,j6));J(i6,j6)=-N(i6,j6);L(i6,j6)=H(i6,j6);elseH(i6,i6)=Hd1(i6)-V(i6)*Y(i6,i6)*V(i6)*sin(delt(i6)-delt(j6)-alf(i6,j6));J(i6,j6)=-Jd1(i6)+V(i6)*Y(i6,j6)*V(j6)*cos(delt(i6)-delt(j6)-alf(i6,j6));N(i6,j6)=-Jd1(i6)-V(i6)*Y(i6,i6)*V(i6)*cos(alf(i6,i6));L(i6,i6)=-Hd1(i6)+V(i6)*Y(i6,i6)*V(i6)*sin(alf(i6,i6));endendend%修正Jacobian矩阵for j9=3for i9=1:nN(i9,j9)=0;L(i9,j9)=0;J(j9,i9)=0;L(j9,i9)=0;endendL(j9,j9)=1;for j9=4for i9=1:nH(i9,j9)=0;N(i9,j9)=0;J(i9,j9)=0;L(i9,j9)=0;H(j9,i9)=0;N(j9,i9)=0;J(j9,i9)=0;L(j9,i9)=0;endendH(j9,j9)=1;L(j9,j9)=1;%Jaco=[H N;J L];%Jaco=zeros(2*n,2*n);for i11=1:nfor j11=1:nJaco(2*i11-1,2*j11-1)=H(i11,j11); Jaco(2*i11-1,2*j11)=N(i11,j11); Jaco(2*i11,2*j11-1)=J(i11,j11);Jaco(2*i11,2*j11)=L(i11,j11);endendA=Jaco;33333.数据:4 4 1.05 0.000011 12 0.1 0.40 0.015282 1 4 0.12 0.50 0.019203 24 0.08 0.40 0.014131 1 3 0 0.3 0.909090911 1 0 0 0.30 0.182 2 0 0 0.55 0.133 3 0.5 0 0 01 3 1.10 0 0。
MATLAB 极坐标求解潮流计算

电力系统分析大作业——潮流计算班级:XXX姓名:XXX学号:XXX程序清单:%直角坐标法求解潮流计算clear;close;clc;Branch=[1 2 0.1+0.4j 0.01528j 1 03 1 0.3j inf 1.1 11 4 0.12+0.50j 0.01920j 1 02 4 0.08+0.40j 0.01413j 1 0]%Branch矩阵:1、支路首端号;2、支路末端号;3、支路阻抗;4、支路对地导纳;5、支路的变化;6、支路首端处于K侧为1,1侧为0Y=zeros(4); %节点导纳矩阵for i=1:4if Branch(i,6)==0 %不含变压器的支路j=Branch(i,1);k=Branch(i,2);Y(j,k)=Y(j,k)-1/Branch(i,3);Y(k,j)=Y(j,k);Y(j,j)=Y(j,j)+1/Branch(i,3)+Branch(i,4);Y(k,k)=Y(k,k)+1/Branch(i,3)+Branch(i,4);elsej=Branch(i,1);k=Branch(i,2);Y(j,k)=Y(j,k)-Branch(i,5)/Branch(i,3);Y(k,j)=Y(j,k);Y(j,j)=Y(j,j)+1/Branch(i,3);Y(k,k)=Y(k,k)+Branch(i,5)^2/Branch(i,3);endenddisp('节点导纳矩阵');YG=real(Y);B=imag(Y);V=[1;1;1.1;1.05];%给定V的初始计算值e=real(V);f=imag(V);disp('节点电压的实部:')edisp('节点电压的虚部:')fdisp('节点注入有功功率:')Ps=[-0.3;-0.55;0.5;0]disp('节点注入无功功率:')Qs=[-0.18;-0.13;0;0]%由各节点电压向量(状态变量)可得各节点注入功率:P=e.*(G*e-B*f)+f.*(G*f+B*e);Q=f.*(G*e-B*f)-e.*(G*f+B*e);del_W=[-0.30-P(1);-0.18-Q(1);-0.55-P(2);-0.13-Q(2);0.5-P(3);1.1^2-e(3)^2-f(3)^2];n=0;%辅助循环计数变量while (any(del_W>1e-5))&(n<5)n=n+1;disp('迭代次数:');disp(n)%--------------------------------------------------------%修正方程式:% [-0.30-P(1) ] [del_e(1)]% [-0.18-Q(1) ] [del_f(1)]% [-0.55-P(2) ] [del_e(2)]% [-0.13-Q(2) ] + J * [del_f(2)] = 0 % [0.5-P(3) ] [del_e(3)]% [1.1^2-e(3)^2-f(3)^2] [del_f(3)]%雅克比矩阵为:J=[P1_e1 P1_f1 P1_e2 P1_f2 P1_e3 P1_e3;% Q1_e1 Q1_f1 Q1_e2 Q1_f2 Q1_e3 Q1_f3% P2_e1 P2_f1 P2_e2 P2_f2 P2_e3 P2_f3% Q2_e1 Q2_f1 Q2_e2 Q2_f2 Q2_e3 Q2_f3% P3_e1 P3_f1 P3_e2 P3_f2 P3_e3 P3_f3% V3_e1 V3_f1 V3_e2 V3_f2 V3_e3 V3_f3]%--------------------------------------------------------%-------------------求雅可比矩阵的参数-----------------------%GeBf=G*e-B*f;%辅助计算函数GfBe=G*f+B*e;%辅助计算函数for i=1:2for j=1:3if i==jP_e(i,j)=-GeBf(i)-G(i,j)*e(i)-B(i,j)*f(i);P_f(i,j)=-GfBe(i)-G(i,j)*f(i)+B(i,j)*e(i);Q_e(i,j)=GfBe(i)+B(i,j)*e(i)-G(i,j)*f(i);Q_f(i,j)=-GeBf(i)+G(i,j)*e(i)+B(i,j)*f(i);elseP_e(i,j)=-G(i,j)*e(i)-B(i,j)*f(i);Q_f(i,j)=-P_e(i,j);P_f(i,j)=B(i,j)*e(i)-G(i,j)*f(i);Q_e(i,j)=P_f(i,j);endendendfor j=1:2P_e(3,j)=-G(3,j)*e(3)-B(3,j)*f(3);P_f(3,j)=B(3,j)*e(3)-G(3,j)*f(3);V_e(3,j)=0;V_f(3,j)=0;endP_e(3,3)=-GeBf(3)-G(3,3)*e(3)-B(3,3)*f(3);P_f(3,3)=-GfBe(3)-G(3,3)*f(3)+B(3,3)*e(3);V_e(3,3)=-2*e(3);V_f(3,3)=-2*f(3);%----------------------------------------------------%%--------------------求出雅克比矩阵-------------------% J=zeros(6,6);for i=1:3for j=1:3J(2*i-1,2*j-1)=P_e(i,j);J(2*i-1,2*j)=P_f(i,j);endendfor i=1:2for j=1:3J(2*i,2*j-1)=Q_e(i,j);J(2*i,2*j)=Q_f(i,j);endendfor j=1:3J(6,2*j-1)=V_e(3,j);J(6,2*j)=V_f(3,j);enddisp('雅可比矩阵为:')J%-----------------------------------------------------%%------------解修正方程并得出修正后的电压向量-----------% del_V=-J\del_W;clear i;for k=1:3V(k)=V(k)+del_V(2*k-1)+i*del_V(2*k);enddisp('节点电压为:')disp(V)%-----------------------------------------------------%%------------------计算节点不平衡量--------------------%e=real(V);f=imag(V);P=e.*(G*e-B*f)+f.*(G*f+B*e);Q=f.*(G*e-B*f)-e.*(G*f+B*e);del_W=[-0.30-P(1);-0.18-Q(1);-0.55-P(2);-0.13-Q(2);0.5-P(3);1.1^2-e(3)^2-f(3)^2];disp('节点不平衡量为:')disp(del_W)end%------------------------最终结论-------------------------%disp('最终各节点电压幅值为:')disp(abs(V))disp('最终各节点电压相角(度)为:')disp(180*angle(V)/pi)disp('最终各节点注入功率:')S=P+i*Qdisp('最终各节点注入有功功率为:')Pdisp('最终各节点注入无功功率为:')Q运行结果:Branch =1.00002.0000 0.1000 + 0.4000i 0 + 0.0153i 1.0000 03.0000 1.0000 0 + 0.3000i Inf 1.1000 1.00001.0000 4.0000 0.1200 + 0.5000i 0 + 0.0192i1.0000 02.0000 4.0000 0.0800 + 0.4000i 0 + 0.0141i 1.0000 0节点导纳矩阵Y =1.0421 - 8.2429i -0.5882 +2.3529i 0 +3.6667i -0.4539 + 1.8911i-0.5882 + 2.3529i 1.0690 - 4.7274i 0 -0.4808 + 2.4038i0 + 3.6667i 0 0 - 3.3333i 0-0.4539 + 1.8911i -0.4808 + 2.4038i 0 0.9346 - 4.2616i节点电压的实部:e =1.00001.00001.10001.0500节点电压的虚部:f =节点注入有功功率:Ps =-0.3000-0.55000.5000节点注入无功功率:Qs =-0.1800-0.1300迭代次数:1雅可比矩阵为:J =-1.0194 -8.3719 0.5882 2.3529 0 3.6667 -8.1138 1.0648 2.3529 -0.5882 3.6667 00.5882 2.3529 -1.0450 -4.8770 0 02.3529 -0.5882 -4.5778 1.0930 0 00 4.0333 0 0 0 -3.66670 0 0 0 -2.2000 0节点电压为:0.9935 - 0.0088i0.9763 - 0.1078i1.1000 + 0.1267i1.0500节点不平衡量为:-0.0013-0.0028-0.0135-0.05470.0030-0.0160迭代次数:2雅可比矩阵为:J =-0.8091 -8.3613 0.6052 2.3325 0.0324 3.6429 -7.9992 1.4071 2.3325 -0.6052 3.6429 -0.03240.8280 2.2338 -1.0190 -4.6364 0 02.2338 -0.8280 -4.3641 2.0878 0 0-0.4644 4.0333 0 0 -0.0324 -3.64290 0 0 0 -2.2000 -0.2533节点电压为:0.9847 - 0.0086i0.9590 - 0.1084i1.0924 + 0.1289i1.0500节点不平衡量为:-0.0000-0.0000-0.0003-0.00110.0001-0.0001迭代次数:3雅可比矩阵为:J =-0.7940 -8.2936 0.5995 2.3120 0.0315 3.6107 -7.9228 1.4000 2.3120 -0.5995 3.6107 -0.03150.8191 2.1927 -0.9865 -4.6144 0 02.1927 -0.8191 -4.2210 2.0885 0 0-0.4728 4.0056 0 0 -0.0315 -3.61070 0 0 0 -2.1849 -0.2579。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
潮流例题:根据给定的参数或工程具体要求(如图),收集和查阅资料;学习相关软件(软件自选:本设计选择Matlab进行设计)。
2.在给定的电力网络上画出等值电路图。
3.运用计算机进行潮流计算。
4.编写设计说明书。
一、设计原理
1.牛顿-拉夫逊原理
牛顿迭代法是取x0 之后,在这个基础上,找到比x0 更接近的方程的跟,一步一步迭代,从而找到更接近方程根的近似跟。
牛顿迭代法是求方程根的重要方法之一,其最大优点是在方程f(x) = 0 的单根附近具有平方收敛,而且该法还可以用来求方程的重根、复根。
电力系统潮流计算,一般来说,各个母线所供负荷的功率是已知的,各个节点电压是未知的(平衡节点外)可以根据网络结构形成节点导纳矩阵,然后由节点导纳矩阵列写功率方程,由于功率方程里功率是已知的,电压的幅值和相角是未知的,这样潮流计算的问题就转化为求解非线性方程组的问题了。
为了便于用迭代法解方程组,需要将上述功率方程改写成功率平衡方程,并对功率平衡方程求偏导,得出对应的雅可比矩阵,给未知节点赋电压初值,一般为额定电压,将初值带入功率平衡方程,得到功率不平衡量,这样由功率不平衡量、雅可比矩阵、节点电压不
平衡量(未知的)构成了误差方程,解误差方程,得到节点电压不平衡量,节点电压加上节点电压不平衡量构成新的节点电压初值,将新的初值带入原来的功率平衡方程,并重新形成雅可比矩阵,然后计算新的电压不平衡量,这样不断迭代,不断修正,一般迭代三到五次就能收敛。
牛顿—拉夫逊迭代法的一般步骤:
(1)形成各节点导纳矩阵Y。
(2)设个节点电压的初始值U和相角初始值e 还有迭代次数初值为0。
(3)计算各个节点的功率不平衡量。
(4)根据收敛条件判断是否满足,若不满足则向下进行。
(5)计算雅可比矩阵中的各元素。
(6)修正方程式个节点电压
(7)利用新值自第(3)步开始进入下一次迭代,直至达到精度退出循环。
(8)计算平衡节点输出功率和各线路功率
2.网络节点的优化
1)静态地按最少出线支路数编号
这种方法由称为静态优化法。
在编号以前。
首先统计电力网络个节点的出线支路数,然后,按出线支路数有少到多的节点顺序编号。
当由n 个节点的出线支路相同时,则可以按任意次序对这n 个节点进行编号。
这种编号方法的根据是导纳矩阵中,出线支路数最少的节点所对应的行中非零元素也2)动态地按增加出线支路数最少编号在上述的方法中,各节点的出线支路数是按原始网络统计出来的,在编号过程中认为固定不变的,事实上,在节点消去过程中,每消去一个节点以后,与该节点相连的各节点的出线支路数将发生变化(增加,减少或保持不变)。
因此,如果每消去一个节点后,立即修正尚未编号节点的出线支路数,然后选其中支路数最少的一个节点进行编号,就可以预期得到更好的效果,动态按最少出线支路数编号方法的特点就是按出线最少原则编号时考虑了消去过程中各节点出线支路数目的变动情况。
3.MATLAB编程应用
Matlab 是“Matrix Laboratory”的缩写,主要包括:一般数值分析,矩阵运算、数字信号处理、建模、系统控制、优化和图形显示等应用程序。
由于使用Matlab 编程运算与人进行科学计算的思路和表达方式完全一致,所以不像学习高级语言那样难于掌握,而且编程效率和计算效率极高,还可在计算机上直接输出结果和精美的图形拷贝,所以它的确为一高效的科研助手。
二、设计内容
1.设计流程图
2.程序
clear;clc
%重新编号,把原题中的节点1,2,3,4,5重新依次编号为5,1,2,3,4,其中1-4号为PQ节点,5号为平衡节点
y=0;
%输入原始数据,求节点导纳矩阵
y (1,2)=1/(0.06+0.18i); y (1,3)=1/(0.06+0.18i); y (1,4)=1/(0.04+0.12i);
y(1,5)=1/(0.02+0.06i);
y(2,3)=1/(0.01+0.03i);y(2,5)=1/(0.08+0.24i);
y(3,4)=1/(0.08+0.24i);
y(4,5)=0;
for i=1:5
for j=i:5
y(j,i)=y(i,j);
end
end
Y=0;
%求互导纳
for i=1:5
for j=1:5
if i~=j
Y(i,j)=-y(i,j);
end
end
end
%求自导纳
for i=1:5
Y(i,i)=sum(y(i,:));
end
Y %Y 为导纳矩阵
G=real(Y);
B=imag(Y);
%原始节点功率
S(1)=0.2+0.2i;
S(2)=-0.45-0.15i;
S(3)=-0.4-0.05i;
S(4)=-0.6-0.1i;
S(5)=0;
P=real(S);
Q=imag(S);
%赋初值
U=ones(1,5);U(5)=1.06;
e=zeros(1,5);
ox=ones(8,1);fx=ones(8,1);
count=0 %计算迭代次数
while max(fx)>1e-5
for i=1:4
for j=1:4
H(i,j)=0;N(i,j)=0;M(i,j)=0;L(i,j)=0;oP(i)=0;oQ(i)=0;
end
end
for i=1:4
for j=1:5
oP(i)=oP(i)-U(i)*U(j)*(G(i,j)*cos(e(i)-e(j))+B(i,j)*sin(e(i)-e(j)));
oQ(i)=oQ(i)-U(i)*U(j)*(G(i,j)*sin(e(i)-e(j))-B(i,j)*cos(e(i)-e(j)));
end
oP(i)=oP(i)+P(i); oQ(i)=oQ(i)+Q(i);
end
fx=[oP,oQ]';
%求雅克比矩阵
%当i~=j时候求H,N,M,L 如下:
for i=1:4
for j=1:4
if i~=j H(i,j)=-U(i)*U(j)*(G(i,j)*sin(e(i)-e(j))-B(i,j)*cos(e(i)-e(j)));
N(i,j)=-U(i)*U(j)*(G(i,j)*cos(e(i)-e(j))+B(i,j)*sin(e(i)-e(j)));
L(i,j)=H(i,j);
M(i,j)=-N(i,j);
end
end
end
H,N,M,L
%当i=j 时H,N,M,L如下:
for i=1:4
for j=1:5
if i~=j
H(i,i)=H(i,i)+U(i)*U(j)*(G(i,j)*sin(e(i)-e(j))-B(i, j)*cos (e(i)-e(j))); N(i,i)=N(i,i)-U(i)*U(j)*(G(i, j)*cos(e(i)-e(j))+B(i,j)*sin(e(i)-e(j)));
M(i,i)=M(i,i)-U(i)*U(j)*(G(i,j)*cos(e(i)-e(j))+B(i,j)*sin(e(i)-e(j)));
L(i,i)=L(i,i)-U(i)*U(j)*(G(i,j)*sin(e(i)-e(j))-B(i,j)*cos(e(i)-e(j)));
end
end
N(i,i)=N(i,i)-2*(U(i))^2*G(i,i);
L(i,i)=L(i,i)+2*(U(i))^2*B(i,i);
end
J=[H,N;M,L] %J 为雅克比矩阵
ox=-((inv(J))*fx);
for i=1:4
oe(i)=ox(i); oU(i)=ox(i+4)*U(i);
end
for i=1:4
e(i)=e(i)+oe(i); U(i)=U(i)+oU(i);
end
count=count+1;
end
ox,U,e,count
%求节点注入的净功率
i=5;
for j=1:5
P(i)=U(i)*U(j)*(G(i,j)*cos(e(i)-e(j))+B(i,j)*sin(e(i)-e(j)))+P(i);
Q(i)=U(i)*U(j)*(G(i,j)*sin(e(i)-e(j))-B(i,j)*cos(e(i)-e(j)))+Q(i);
end
S(5)=P(5)+Q(5)*sqrt(-1);
S
%求节点注入电流
I=Y*U'
3.运行结果
Y值:
迭代过程:
电压值:
平衡节点注入功率及电流:。