非线性误差校正方法
自动控制原理第十章非线性控制系统
自动控制原理第十章非线性控制系统非线性控制系统是指系统动态特性不能用线性数学模型表示或者用线性控制方法解决的控制系统。
非线性控制系统是相对于线性控制系统而言的,在现实工程应用中,许多系统经常具有非线性特性,例如液压系统、电力系统、机械系统等。
非线性控制系统的研究对于实现系统的高效控制和稳定运行具有重要意义。
一、非线性控制系统的特点1.非线性特性:非线性控制系统的动态特性往往不能用线性方程或者线性微分方程描述,经常出现非线性现象,如饱和、死区、干扰等。
2.多变量关联:非线性系统动态关系中存在多个变量之间的相互影响,不同变量之间存在复杂的耦合关系,难以分离分析和解决。
3.滞后响应:非线性系统的响应时间较长,且在过渡过程中存在较大的像后现象,不易预测和控制。
4.不确定性:非线性系统通常存在参数变化、外部扰动和测量误差等不确定性因素,会导致系统性能变差,控制效果下降。
二、非线性控制系统的分类1.反馈线性化控制:将非线性系统通过适当的状态反馈、输出反馈或其它形式的反馈转化为线性系统,然后采用线性控制方法进行设计。
2.优化控制:通过建立非线性系统的数学模型,利用优化理论和方法,使系统达到其中一种性能指标最优。
3.自适应控制:根据非线性系统的参数变化和不确定性,设计自适应控制器,实时调整控制参数,以适应系统的动态变化。
4.非线性校正控制:通过建立非线性系统的映射关系,将测量信号进行修正,以减小系统的非线性误差。
5.非线性反馈控制:根据非线性系统的特性,设计合适的反馈控制策略,使得系统稳定。
三、非线性控制系统设计方法1.线性化方法:通过将非线性系统在其中一工作点上线性化,得到局部的线性模型,然后利用线性控制方法进行设计和分析。
2.动态编程方法:采用动态系统优化的方法,建立非线性系统的动态规划模型,通过求解该模型得到系统的最优控制策略。
3.反步控制方法:通过构造适当的反步函数和反步扩散方程,实现系统状态的稳定和输出的跟踪。
如何校正非线性测量装置的误差

如何校正非线性测量装置的误差在现代科技的发展中,测量装置在各个领域中起着重要的作用。
然而,由于各种因素的影响,测量装置在进行测量时可能会存在误差。
其中一种常见的误差类型是非线性误差,即测量结果与真实值之间的偏差不是线性的关系。
本文将探讨如何校正非线性测量装置的误差,并提出了一些可能的解决方案。
首先,了解非线性误差的来源对于校正过程至关重要。
非线性误差可能是由于测量装置本身的设计缺陷所致,也可能是外界环境因素对测量结果的干扰导致的。
为了确定误差的来源,我们可以通过对测量装置进行详细的性能测试和实验研究来获取数据。
这些数据将为我们提供非线性误差的特征和模式,从而帮助我们更好地进行校正。
其次,校正非线性误差的方法有很多种。
一种常见的方法是使用非线性补偿技术。
这种技术基于对非线性误差进行数学建模,然后将该模型应用于测量数据以纠正误差。
这个过程可以通过计算机软件来实现,使得校正更加自动化和精确。
然而,该方法的局限性在于需要准确的数学模型以及对非线性误差形式的准确了解。
另一种方法是使用校准曲线。
校准曲线是通过对已知标准值的测量,获取一系列对应的测量值并绘制成曲线。
这条曲线将提供待校准测量值与真实值之间的关系,从而可以通过测量值在曲线上的位置进行校正。
这种方法的优势在于对非线性误差形式的具体了解要求相对较低,同时也能够提供相对较高的校正精度。
此外,采用多点校准方法也是一种常见的方式。
这个方法要求我们在测量范围内选择多个不同数值的标准值进行测量。
然后,将这些标准值与测量装置的测量结果进行对比,找出误差的来源和特征。
通过对多个点进行校正,我们可以更具体地校正测量装置的非线性误差。
值得注意的是,校正非线性测量装置的过程可能是一个相对复杂和繁琐的任务。
首先,我们需要通过实验和测试来获取足够的数据以了解误差的特征和模式。
其次,我们需要选择合适的校正方法来进行校正。
最后,校正过程可能需要多次迭代和验证以确保校正结果的准确性和稳定性。
系统误差校正技术

果将会带有一定的残余误差。 带有一定的残余误差。
误差模型的建立,必须具体情况具体分析。
• 在任意两个校准点之间的校准曲线段,可以近似地看成是
一段直线。如图6-36所示。
• 在两校准点之间进行内插,最简单的 方法是作线性内插,当yn<y<yn+1时, 取
xxn((yxnn 11 xy))(yyn)
• 根据上式可画出查表内插程序框图, 见图6-37。程序由一些简单的加、减、 乘、除子程序组成。
图6-39 平方插值法校正曲线的分段拟合
Do you have made a progress today ?
通过查表求得修正了的测量结果。
3 折线逼近法非线性校正
量(如电压)x 、x 、…、x ,并得到实际测出的y 、 这平一方步 插骤值称法为实“质零上点也校是准一”种。分段校正法,它1 与分段析2 线法的主要区别n是,在每一段中不是采用线性拟合,而是采用1二阶抛物线拟合,
y 、…、y ,于时可作出校准曲线,见图6-36a。将实际测 这要样建拟 立合适的当结的果误2 显差然模比型直,线必拟须合对n更误精差确来。源有充分的了解,在较复杂的仪器中,这一点未必能做得到。
图6-37 查表法内插计算流程图
பைடு நூலகம்
6.6.3 折线逼近法非线性校正
• 可用 段折线逼近实际的非线性曲线,见图6-38,图中,用 三段折线拟合实际非线性曲线,其中 为被测量, 是测量 数据。 折线段可由下列直线方程来描述
y axb
式中,a、b为系数。每一条折线 段有两个点是已知的。
图6-38 折线逼近法非线性校正
n
值介于某两校准点y 和y 之间时,可按最邻近的一个值y 先图令中输 ,入x是端输短入路的(被开测关量S,1闭y合是,带S有2误和差S3的断测开量)结,果此n,时e有为x影=0n响+,量1其(输例出如为零y点0 漂,移按或式干(扰6-1)4,)i可是得偏:置量(如放大器的偏置电流)n,k代表
4.4非线性校正算法

x x0 x x1 p n ( x) y0 y1 a1 x a0 x0 x1 x0 x1
其中:
y1 y0 a1 , x0 x1
a0 y0 a1 x0
若(x0,y0)、(x1,y1),取在非线性特性曲线f(x) 或数组的两端点A、B,如下图中的直线表示插值方程, 这种线性插值就是最常用的直线方程校正法
(含两端点)联
yi 1 ai xi 1 bi xi 1 ci 2 yi1 ai xi1 bi xi1 ci yi ai xi2 bi xi ci 可以求出 ai , bi , ci
分段插值流程图
4.4.3 拟合法 一、最小二乘法 利用n次多项式进行拟合,可以保证在n+1 个节点上校正误差为零,因为拟合曲线折线恰好经 过这些节点。但是,如果这些实验数据有随机误差, 得到得校正方程并不一定能反映出实际的函数关系。 因此,对于含有随机误差得实验数据的拟合,通常 选择误差平方和的最小这一标准来衡量逼近结果, 这就是最小二乘法原理。
max ( x) f ( x)
线性最佳一致逼近法
分段最佳一致逼近法
分段线性最佳一致逼近
谢谢!
非等距节点分段直线插值
四、抛物线插值
如图所示将曲线分成四段,每一段都可以用一个二阶抛物线方程
y ai x2 bi x ci (i 1,2,3,4) 来描绘。其中,抛物线的系数 a , b , c i i i
可通过下述方法获得:每一段找出三点 立方程 2
xi 1 , xi1 , xi
) 第一, z ( x的表达式比较简单,便于计算机处理。故 一般为多项式。
第二,在所有选定的校准点(也称插值点) 上满足:
数字测量系统失调和量程及非线性的一种校正方法(1)
A Correction Method for O ffsets and Scale and Nonlinearityin Digital Measurement SystemLO NG Yong ,C HE N Guang -meng ,LIU Zhu -wang ,Z HANG Ling(Electrical Engineerin g Department,Fu dan Uni versity ,Shanghai 200433,China)Abstract: It is one of the key techniques to correct nonlinearity,scale and offsets in a measurement system.A soft -ware correction method based on MC U system is represented here.Replacing the hardware circuits,the software method can implement the correction of nonlinearity,scale and offsets at the same time.C ombining the Quadratic E -quations and Lagrange Interpolating Polynomial,the software method can obtain the correction indexes and measure -ment results with less computing time and less memory.Moreover,the whole program can prevent being pirated by d-i viding it into two parts.Key words: offse t;scale;nonlinearity;MCU system;software correction;software protection数字测量系统失调和量程及非线性的一种校正方法龙 泳,陈光梦,刘祖望,张 玲(复旦大学电子工程系,上海 200433)摘要:失调、量程及非线性的校正,是测量系统中的一项关键技术。
振镜标定校正表
振镜标定校正表
振镜标定校正表是用于振镜(GALVO)的标定和校正的表格。
振镜是一种电磁装置,常用于激光扫描系统中,能够控制激光束的方向和位置。
为了确保扫描系统的准确性和稳定性,需要对振镜进行标定和校正。
振镜标定校正表通常包括以下内容:
1. 零位校准:确定振镜在无输入信号时的初始位置(通常为中心位置)。
2. 响应曲线:记录不同输入信号下振镜的响应情况,包括输入信号与振镜输出位置之间的关系。
3. 非线性误差校正:由于振镜本身的特性或外部因素的影响,振镜可能存在非线性误差。
校正表中可以包含对非线性误差的校正方法和数据。
4. 温度补偿:振镜的性能可能会随着温度的变化而发生改变。
校正表中可以包含温度补偿方法和相关数据,以确保在不同温度条件下的准确性。
5. 扭曲校正:振镜可能存在扭曲或畸变的情况,校正表可以提供相应的校正方法和数据。
6. 校准日期和操作者:记录标定和校正的日期以及执行者的信息,以便进行追溯和管理。
通过使用振镜标定校正表,可以确保振镜在工作过程中的精确性和可靠性,进而提高激光扫描系统的性能和稳定性。
传感器非线性误差的修正
传感器非线性误差的修正摘 要:传感器在采集数据时存在一定的非线性误差。
要使系统的性能达到最佳,必须对传感器的非线性误差进行分析和处理。
本文讨论了传感器非线性误差的几种处理方法,并对各种方法作了比较。
关键词:非线性误差,硬件电路校正,查表法,插值法,最小二乘法,频域修正法一、 引言在工业过程控制中,由于传感器的非线性输出特性和同种传感器的输出存在一定的分散性,测量结果会产生一定的误差。
为此,我们需要对传感器的特性进行校正和补偿,以提高测量的精度,并且使传感器输出线性化和标准化。
对非线性误差的矫正和补偿可以采用硬件电路或者软件的方法来实现。
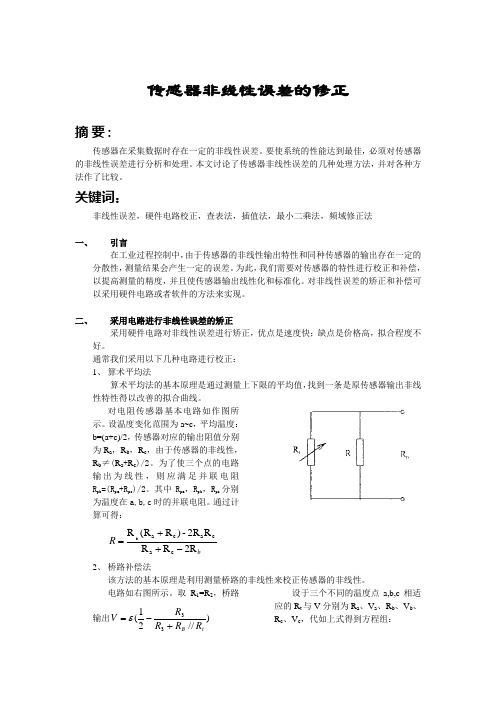
二、 采用电路进行非线性误差的矫正采用硬件电路对非线性误差进行矫正,优点是速度快;缺点是价格高,拟合程度不好。
通常我们采用以下几种电路进行校正:1、 算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到一条是原传感器输出非线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所示。
设温度变化范围为a~c ,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a ,R b ,R c ,由于传感器的非线性,R b ≠(R a +R c )/2。
为了使三个点的电路输出为线性,则应满足并联电阻R pb =(R pa +R pc )/2。
其中R pa ,R pb ,R pc 分别为温度在a,b,c 时的并联电阻。
通过计算可得: b R R 2R R R 2R -)R (R R c a ca c ab -++=2、 桥路补偿法该方法的基本原理是利用测量桥路的非线性来校正传感器的非线性。
电路如右图所示。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε 设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到方程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此方程组可得到满足要求的R3、R B 、ε。
电气检测技术(新9)AD转换原理
25
1) ai为输入数字量,接CPU的DBUS。可选用 不同的代码,常用的DAC采用二进制码。
2)触发器构成的缓冲寄存器(锁存器),锁存 CPU送来的数据。得到和暂存对应的输出电压。
压分辨率为5V/255≈20mV;10位DAC的分辨率为 5V/1023≈5mV。 位数越多,分辩率越高,转换的精度也越高。
2
测量系统用ADC的主要类型:
1、适用于数字仪器、仪表的ADC; 这类产品多半设计成BCD码输出,转换速度 一般较低(每秒转换十几次)。
2、适用测量系统作模/数接口部件的ADC。 这类产品的转换速度较高,多半以二进制代码 (含双极性代码)输出,常设计成带有三态 输出锁存器,能方便实现与微处理器直接接口。
18
3、应用
产品种类多,转换能力有很大的差异; 有8Bit、10Bit、12Bit、14Bit、16Bit等。 在这些不同转换能力的ADC中,又包括有并行输 出的ADC,以及输出为串行的ADC。 常见的8Bit的有NS公司的ADC0801、DC0802、 ADC0803、ADC0804系列及ADC0808、 ADC0809系列 10Bit有AD公司的AD574,MAXIM公司 MAX1425、MAX1426 12Bit有AD公司的AD7888,MAXIM公司 MAX170、MAX172
有些DAC芯片内无缓冲寄存器,此时须外接, 如74LS273、373等锁存器。
26
3) 模拟开关按输入的数字量接通或断开解码 网相应支路的电流或电压;对它的要求比接通或 断开开关量的电子开关更高。希望动作快;接通 电阻很小,断开电阻很大,且稳定性好。在DAC 中有电压型开关和恒流型电流开关之分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非线性误差校正方法
1、网格尺寸为26” X 20”,x方向为26”,y方向为20”。
以下示图与Campost中网格方向
一致。
y
A(0,20) x方向D(26,20)
2、非线性误差校正是通过改变固定位置的偏移量来达到校正的效果。
具体描述如下:
偏移量offset(x, y)的单位换算:1 = 0.5mil;
偏移量的正负:正值代表缩短;负值代表拉长;
B点为圆点,不存在偏移量offset。
方向拉长万分之一
y方向拉长万分之一
如上图要求校正:
y方向拉长万分之一,即20000 X 0.0001 = 2mil 对应偏移量的值为4;
x方向拉长万分之一,即26000 X 0.0001 = 2.6mil 对应偏移量的值为5.2.。
给出A, C, D 三点座标如下:
A(0,20) --- A.offset(e, -4)
C(26,0) --- C.offset(-5, e)
D(26,20) --- D.offset(-5, e)
偏移量的值只能取整数,偏移量为e表示程序自动计算。
同理可得缩短的校正方法。
3、矩形的校正
点向下移动1mil
如上图要求校正,给出A, C, D 三点座标如下:A(0,20) --- A.offset(e, e)
C(26,0) --- C.offset(e, 2)
D(26,20) --- D.offset(e, 2)
第一步确保B点即原点对齐,然后对准A点;C,D两点相对A,B两点向上,偏移量给正值;C,D两点相对A,B两点向下,偏移量给负值;
4、综合2、3两部的校正
给出A, C, D 三点座标如下:
A(0,20) --- A.offset(e, -4)
C(26,0) --- C.offset(-5, 2)
D(26,20) --- D.offset(-5, -2)
D点的y值= A点的y值+ C点的y值。