4.4非线性校正算法教程
交通矢量地图离散非线性校正算法
校正算法 , : 即的选取 以及所选取 离散块 内各节 点的相应调 整。通过对 整个 地图平面的分块非线性校正 , 在合理选取校正样本 的情况下能够对整个地图的所有局部区域达到最优的校正 。与传统的线 性 自动校正算法相 比, 这种算法可 以有效地消除矢量地 图中的非线性误差 , 论上也有所深 入。实验 中将该 算法应用 于合 理 肥、 成都等城市 的矢量地 图校正 中, 取得 了良好 的校正效果 。应用校 正算法得到 的交通矢量地 图将 为交通管 理或监控 导航 系统提供准确的资料信息和更好 的智能决策服务 , 从而给人们生活带来极大的便利。
v hcen v ai d m n o n ytm a dtu r gn u hc n e i c e pe i . e i a i t na o i r gss s i i gm c o v ne et p o l ̄l e l g o n ti e n h bn n o f
KEYW ORDS: c o p; t r o oo y; p i g; s r t ra Ve t rma Newo k t p lg Ma p n Dicee ae
go—ajsn to a e dsr ennier e —ajs n gr m”b e nteaa s bu e ooo ・ e dut gme dn m d” i e ol a o dut ga o t i h ct n g i li h s a do nl iao t plg h ys h t t i c t c r f hm.T ekyt ti agr m i tec os go i rt ae dgo—ajsn en e . l r u a s ut o te e h e s o t hoi f s e r a e oh i l h s h n d c e an dut gt o si i i h d nt T r s edvd g rannierajsn f h hl m p i ecs a w h s o eraoal Sl- h u ht i i —ae ol a d t go ew o a , nt aet t eco eSm snbe a I e h in n ui t e h h e T pe , ltepra ae a e tebs ajsn .C m ae et dt n na uo—ajsn gr m, t i a a i r c gt et d t g o prdt t aioa l erat s lh t l a n h ui oh r i l i dut ga o t i l i h i
传感器非线性误差的修正
传感器非线性误差的修正摘 要:传感器在采集数据时存在一定的非线性误差。
要使系统的性能达到最佳,必须对传感器的非线性误差进行分析和处理。
本文讨论了传感器非线性误差的几种处理方法,并对各种方法作了比较。
关键词:非线性误差,硬件电路校正,查表法,插值法,最小二乘法,频域修正法一、 引言在工业过程控制中,由于传感器的非线性输出特性和同种传感器的输出存在一定的分散性,测量结果会产生一定的误差。
为此,我们需要对传感器的特性进行校正和补偿,以提高测量的精度,并且使传感器输出线性化和标准化。
对非线性误差的矫正和补偿可以采用硬件电路或者软件的方法来实现。
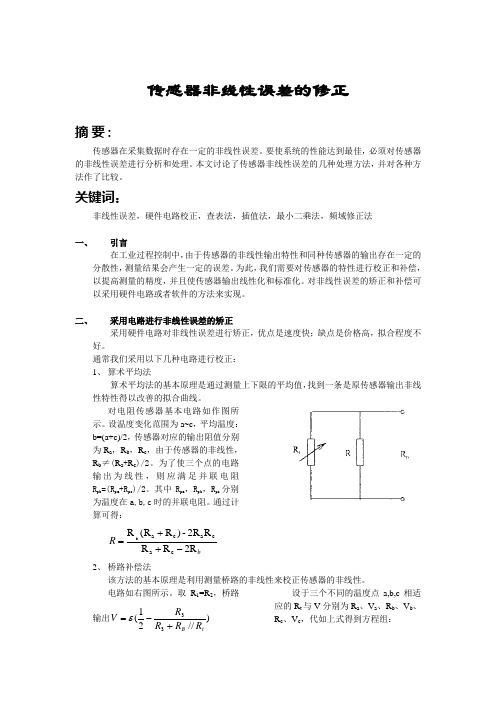
二、 采用电路进行非线性误差的矫正采用硬件电路对非线性误差进行矫正,优点是速度快;缺点是价格高,拟合程度不好。
通常我们采用以下几种电路进行校正:1、 算术平均法算术平均法的基本原理是通过测量上下限的平均值,找到一条是原传感器输出非线性特性得以改善的拟合曲线。
对电阻传感器基本电路如作图所示。
设温度变化范围为a~c ,平均温度:b=(a+c)/2,传感器对应的输出阻值分别为R a ,R b ,R c ,由于传感器的非线性,R b ≠(R a +R c )/2。
为了使三个点的电路输出为线性,则应满足并联电阻R pb =(R pa +R pc )/2。
其中R pa ,R pb ,R pc 分别为温度在a,b,c 时的并联电阻。
通过计算可得: b R R 2R R R 2R -)R (R R c a ca c ab -++=2、 桥路补偿法该方法的基本原理是利用测量桥路的非线性来校正传感器的非线性。
电路如右图所示。
取R 1=R 2,桥路输出)//21(33tB R R R R V +-=ε 设于三个不同的温度点a,b,c 相适应的R t 与V 分别为R a 、V a 、R b 、V b 、R c 、V c ,代如上式得到方程组:)//21(33ab a R R R R V +-=ε )//21(33bb b R R R R V +-=ε )//21(33cb c R R R R V +-=ε解此方程组可得到满足要求的R3、R B 、ε。
第4章 非线性方程数值解法

这是事前估计。选取n,预先估计迭代次数。
例题
例4.2.2 证明函数 (x) 3 x 1 在区间[1, 2]上满足迭代收敛条件。
证明:
1 ' 因为 ( x ) ( x 1) 3 0 3 2
x [1,2]
所以 ( x)是区间 a, b]上严格单调增函数。 [
例题
{xk } 。这种方法算为简单迭代法。
例题
例4.2.1 用迭代格式xk 1 1 (k 0,1, 2,) 2 ( xk 1)
求解方程f ( x) x ( x 1) 2 1 0在区间[0,1]的一个 实根.初始值x0 0.4, 精确至4位有效数字.
解:输入bdd
0.52
二分法
设 所求的根为 x , 则 x [an , bn ] n 1,2......
即
an x bn
n
n 1,2......
lim(bn a n ) lim
n
1 2
n 1
(b a ) 0
取
lim an lim bn x
n n
例题
例1 设方程 f ( x) x3 x 1,[a, b] [1,1.5]
解:取h=0.1,扫描得:
f (1.3) 0.61 0 f (1.4) 0.344 0
方程的有根区间为 .3,1.4]. [1
又 f ' ( x) 3x 2 1 0, x [1.3,1.4] 即 f ( x) 0在 [1.3,1.4]有唯一根。
[a1 , b1 ] [a2 , b2 ]
基于退火遗传算法的传感器非线性校正方法

1 非 线性 自 校 正优 化模 型 采 用 A G 的非 线 性 校 正 原 理 如 图 1所 示 。 IA
近年来 , 硬件电路补偿 和软件补 偿 2种 方法 在传感 器 非线性校正 问题 中得 到了广泛 的研究 和应用。随着硬件补
采用 随机数策略 , 随机生成 r adm[ 1 , =r o 0,] 若 n
() 5
。 )一z ] , 。 为最小值 。 这里 , A G 以 I A来确定 式( ) 2 中的待定 系数 。
2 AI 框 架 GA 24 .
P 0 P( )+… +P i ) <P( )+P( )+… + ( )+ 1 ( -1 <r 0 1
体。
分 别 为 子个
n ni e r y b t s h rc s n at rc re t g i etrt a e s s u r t o . o l a i , u o t e p e ii f or ci sb t h n la t q a e me h d n t l a o e n e
物理学方法 , 并首先被 K rptc 引入 优化 问题 的求 解 , i ar k等 k i
退火 交叉 操作 是 G 中最主要 的遗 传操作 , 是有 了 A 正 交叉 操作 , 得到 了新一代个体 , 使整个种群 能保持一定 的多
样性 。交叉操作 是仿 照生物 学 中杂交 的原理 , 2个个 体 将
最后 , 求解待定常数 a , a ,。 。a , a 。基本思想是 由式( ) 1
确定 的各个 z ( ) 与 z 的均方差应 最小 , 值 即
∑ [。 一 =∑ [n+ + + z ) z] ( ( 。1n 。 Y
第四章 非线性方程求根
4.1 方程求根与二分法
当 f ( x) 为代数多项式时,根据代数基本定理可知, n 次方程在复数域有且只有 n 个根,因此可利用迭代 法求代数方程的根。 二分法 若 f ( x) C[a, b] ,且 f (a) f (b) 0 ,根据连续函数性质 可知 f ( x) 在 [a, b]内至少有一个实根,此时称[a, b]为方程 若 f ( x) 可表示为 f ( x) ( x x* )m g ( x),其中 m 为正整数,且 g ( x* ) 0 。当 m 1 时,称 x* 为单根,若m 1 称 x* 为 m 重 根,或 f ( x) 的 m 重零点。若 x* 是 f ( x) 的 m 重零点,且 g ( x) 充分光滑,则
4.1 方程求根与二分法
这样,我们得到了一个序列 xn ,为确定 xn 的收敛性 我们有如下的定理: 定理:设 f ( x) C[a, b], f (a) f (b) 0, 则二分算法产生的 序列 xn 满足 xn x* (b a) / 2n ,其中 x* [a, b]为方程的根。 证明:因为 [an , bn ] 由[an1 , bn1 ] 对分得到,所以对 n 1 bn1 bn , 否则取 an1 an , bn1 xn , 这样必有 f (an1 ) f (bn1 ) 0 所以 [an1 , bn1 ] 就是新的有根区间,继续此过程,即可得 到结果。 算法:(1)令 x (a b) / 2 (2) 若 f ( x) 或 b x ,则输出 x ,结束 (3) 若 f (a) f ( x) 0 ,则令 a x ,否则令 b x (4) 转向1)
基于遗传算法的传感器非线性校正
遗传算 法l 3 ] ( Ge n e t i c Al g o r i t h m, 简称 G A) 是模 拟生物在 自然环 境中的遗传 和进 化过 程而 形成 的一 种全 局搜 索算 法 , 具有更好 的鲁棒 性 。本文 针对 上述 传 统方法 的不足 , 研 究并 应用遗传算 法解决 了传感 器系统 的非线性 校正 问题 。该方 法
2 GA 及 流 程
最小二乘 法是以梯 度变 化量 的计 算为 基础 来求 最优 解 的 , 本
质上是 一种局部搜 索技 术 , 易 陷入局 部最 优解 而得 不到 全局 最优解 - 2 ] 。 2 . 1 编码 和初 始群 体的生成 由于 GA不能直接 处理 解 空间 的解 数据 , 因此我 们 首先
从( 1 ) 式中可 以看 出,经过遗传算法校正环节后 的输 出 Z
与传感器输入量 x 保持一致 。也就是说经过校 正后输 出与输
入之间呈线性关 系。
Z 可 以 表 示 为
Z 一 广 ( y) 一Ⅱ o +。 1 Y- t - a 2 y 2 + … +n ( 2 )
种校正措施 来解 决这 一 问题 。目前 , 已经有 很 多关 于传 感 器 非线性 校正的方 法 。为 了提 高测 量精 度 , 人 们 采用 各种 方 法 校正传感 器的非 线性 , 包 括硬 件校 正与 软件 校 正。硬件 校 正
式( 2 ) 中, 的数值 由所要求 的准 确度来 确定 。在本 文中 , 我们取 一3 。
Z一 厂 - ( y) 一a 0 + m Y+ 口 2 y2 +“ 3 y3 ( 3 )
式 中, “ 。 , “ , n z , a 。为待定 系数 。本 文就是利用 G A 来确 定式 ( 3 ) 中的待定系数 。
传感器 非线性校正 支持向量机 遗传算法 Matlab
传感器论文:基于遗传支持向量机的传感器非线性校正方法【中文摘要】传感器是测试系统中的重要部件,其性能的好坏及输出信号的可靠性对整个测试系统的质量起着至关重要的作用。
在实际的应用中,传感器容易受到许多环境因素的影响,如温度、磁场、噪声、电源波动等,从而降低了整个系统的测量精度,造成系统稳定性差等问题。
因此,为了改善传感器的性能,进而提高整个测试系统精确度和扩大测量范围,对传感器进行非线性校正具有非常重要的意义。
课题针对传感器非线性校正中现有的几种方法的不足和支持向量机参数难确定的问题,结合遗传算法全局搜索能力强的特点,提出一种遗传算法和支持向量机相结合的方法,建立传感器非线性校正的支持向量机模型,并阐述遗传算法对支持向量机进行参数优化的实现过程。
在实现过程中,应用Matlab语言编制训练程序对CYJ-101型压力传感器进行非线性校正并验证遗传支持向量机方法的可行性。
同时,分别与支持向量机方法和BP神经网络法校正的结果进行对比分析,验证该方法的优越性。
实验结果表明:和支持向量机方法校正的结果相比,遗传支持向量机方法能更好地解决支持向量机及其核函数参数的选取问题,实现参数的最优搭配;BP神经网络法使得传感器的最大相对波动由初始的22.2%降低到1.12%,而遗传...【英文摘要】Sensor is an important part in the test system, the quality of the performance and the reliability of the output signal play a vital role in the entire test system. In practicalapplications, the sensors can be susceptible to many environmental factors, such as temperature, magnetic field, noise and power fluctuations, which reduce the accuracy and result in poor stability of the system. Therefore, the nonlinear correction of the sensors, which improves the performance of the sensors and the accuracy of the...【关键词】传感器非线性校正支持向量机遗传算法 Matlab 【英文关键词】Sensor Nonlinear Correction Support Vector Machine (SVM) Genetic Algorithm (GA) Matlab【索购全文】联系Q1:138113721 Q2:139938848【目录】基于遗传支持向量机的传感器非线性校正方法摘要8-9ABSTRACT9插图索引11-12附表索引12-13第1章绪论13-23 1.1 引言13 1.2 传感器简介13-15 1.2.1 传感器的基本结构13-14 1.2.2 传感器的基本特性14-15 1.3 传感器的应用领域15-16 1.4 国内外研究现状16-19 1.4.1 传感器的国内外研究现状16-17 1.4.2 传感器非线性校正的国内外研究现状17-19 1.5 传感器的发展趋势19-21 1.6 课题的研究意义及主要内容21-23 1.6.1 课题的研究意义21-22 1.6.2 课题研究的主要内容22-23第2章支持向量机理论及遗传算法23-38 2.1 统计学习理论23-25 2.2 支持向量机25-33 2.2.1 支持向量机分类26-30 2.2.2 核函数30 2.2.3 支持向量机回归30-33 2.3 遗传算法33-36 2.3.1 遗传算法的基本原理33-34 2.3.2 遗传算法的基本流程34-35 2.3.3 遗传算法的基本操作35-36 2.3.4 遗传算法的特点36 2.4 遗传算法和支持向量机相结合的可行性分析36-37 2.5 小结37-38第3章基于GA-SVM的传感器非线性校正模型的建立38-45 3.1 CYJ-101 型压阻式压力传感器介绍38-41 3.1.1 基本结构38-39 3.1.2 工作原理39 3.1.3 测量电路39-40 3.1.4 主要特点40-41 3.2 压力传感器的非线性校正原理41-42 3.3 基于支持向量机的压力传感器非线性校正模型42-43 3.4 遗传算法实现支持向量机参数优化的过程43-44 3.5 小结44-45第4章传感器非线性校正实例及结果分析45-56 4.1 实验数据45-46 4.1.1 实验标定数据45-46 4.1.2 归一化处理46 4.2 遗传支持向量机校正结果46-51 4.2.1 多项式核函数的遗传支持向量机校正结果47-49 4.2.2 径向基核函数的遗传支持向量机校正结果49-51 4.3 支持向量机校正结果51-53 4.3.1 多项式核函数的支持向量机校正结果51-52 4.3.2 径向基核函数的支持向量机校正结果52-53 4.4 BP 神经网络法校正结果53-54 4.5 结果分析54-55 4.6 小结55-56第5章传感器非线性校正系统的硬件和软件设计56-66 5.1 系统总体设计56 5.2 硬件部分设计56-61 5.2.1 压力传感器56 5.2.2 程控放大器56-57 5.2.3 A/D 转换电路57-58 5.2.4 AT89C51 单片机58-60 5.2.5 LED 显示60-61 5.2.6 RS-232 实现61 5.3 软件部分设计61-65 5.3.1 软件整体设计及主要子程序61-64 5.3.2 遗传算法子程序64-65 5.3.3 支持向量机算法子程序65 5.4 小结65-66总结与展望66-67参考文献67-72致谢72-73附录A:攻读学位期间所发表的学术论文73。
第四讲传感器信号的线性化与标度变换
当检测值x 确定后,首先通过查表, 当检测值 i确定后,首先通过查表,确定xi 所在区间, 所在区间,再顺序调到预先计算好的 系数项,然后代人插值公式计数出y 系数项,然后代人插值公式计数出y。
采用线性插值法, 采用线性插值法,只要段数分 得足够多, 得足够多,就可以达到必要的计算 精度, 精度,但这需要增加大量的分段数 据和计算机内存容量。因此, 据和计算机内存容量。因此,在满 足精度前提下,选取合适的分段数, 足精度前提下,选取合适的分段数, 以减少标定点数和内存容量, 以减少标定点数和内存容量,并提 高运算速度。 高运算速度。
河 南 工 业 职 业 技 术 学 院 电 气 工 程 系
第四讲
传感器信号的线性化与 标度变换 一、非线性校正 二、标度变换
一、非线性校正
在自动检测系统中, 在自动检测系统中,利用多种传感器把各种被 测量转换成电信号时, 测量转换成电信号时,大多数传感器的输出信号和 被测量之间的关系并非是线性关系。 被测量之间的关系并非是线性关系。这是由于不少 传感的转换原理并非线性, 传感的转换原理并非线性,其次是由于采用的电路 如电桥电路)的非线性。 (如电桥电路)的非线性。 要解决这个问题, 要解决这个问题,在模拟量自动检测系统中可 采用三种方法: 缩小测量范围,取近似值。 采用三种方法:①缩小测量范围,取近似值。②采 用非均匀的指示刻度。 增加非线性校正环节。 用非均匀的指示刻度。③增加非线性校正环节。显 前两种方法的局限性和缺点比较明显。 然,前两种方法的局限性和缺点比较明显。
非线性校正的方法有硬件法和软件法。 非线性校正的方法有硬件法和软件法。 硬件校正法: 硬件校正法:
★在模拟电路中实现非线性校正,可以采用自 在模拟电路中实现非线性校正,
传感器非线性补偿处理
传感器非线性补偿处理
在完成了非线性参数的线性化处理以后,要进行工程量转换,即标度变换,才能显示或打印带物理单位(如℃)的数值,
其框图如图1。
图1 数字量非线性校正框图下面介绍非线性软件处理方法。
用软件进行“线性化”处理的方法有三种:1. 计算法 2. 查表法程序流程图,如图2所示。
图2 挨次查表法程序流程图3. 插值法(1)插值原理设某传感器的输出特性曲线(例如电阻—温度特性曲线)如图3所示。
图3 分段先行插值原理
(2)插值法的计算机实现下边以点斜式直线方程(4-37)为例,讲一下用计算机实现线性插值的方法。
第一步,用试验法测出传感器的变化曲线y=f(x)。
其次步,将上述曲线进行分段,选取各插值基点。
第三步,确定并计算出各插值点的xi、yi值及两相邻插值点间的拟合直线的斜率ki,并存放在存储器中。
第四步,计算x-xi 。
第五步,找出x所在的区域(xi, xi+1),并取出该段的斜率ki。
第六步,计算ki(x-xi)。
第七步,计算结果y=yi+ki(x- xi)。
程序框图见图4。
图4 先行插值计算程序流程图
1。
4非线性方程求解
§ 4.1 一元方程求根
1)问题的提出
满足函数方程
f(x)=0
(1)
的x称为方程(1)的根,或称为函数f(x)的零点。如果 函数(x)可分解为 (x)=(xs)mg(x) 且g(s )0,则称s是(x)的m重零点或(x)=0的m重根。 当m=1时,称s是(x)的单根 或单零点。 若f(x)不是x的线性函数, 则称(1)为非线性方程, 特 别地, 若f(x)是n次多项式,则称(1)为n次多项式方程 或代数方程;若f(x)是超越函数,则称(1)为超越方程。
(2) (3)
说明: 条件(2)可用更强更便于应用的条件代替:
| ( x ) | L 1 x ( a , b)
证: 1o
设g ( x ) x ( x ), 则
g( a ) a ( a ) 0 , g( b ) b ( b ) 0
故至少有一个根 x * [ a , b ], 使 g( x * ) 0, 若另有根 y : y ( y ), 则 | x * y | | ( x * ) ( y ) | L | x * y |, 所以 (1 L) | x * y | 0, 从而 | x * y | 0, 即 x ( x ) 在 a, b 内有唯一解 x * .
2)预备知识 定理1.(根的存在定理) 假设函数y=f(x)Ca,b,且f(a)· f(b)<0, 则 至少存在一点x (a,b)使得f(x )=0. (并称区间(a,b)为有根区间) 定理2. 假设函数y=f(x)在a,b上单调连续,且 f(a)· f(b)<0, 则恰好只存在一点x (a,b)使得 f(x )=0 定理3. 假设函数y=f(x)在x=s的某一邻域内充分可微, 则s是方程f(x )=0的m重根的充分必要条件是
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例,已知热敏电阻的阻值R(kΩ)与温度t(℃)的关系式如 表4-5-1所示
三、线性插值
线性插值是从一组数据(xi,yi)中选取两个代表性的 (x0,y0)、(x1,y1),然后根据插值原理,求出插值 方程 :
pn (x)
x x1 x0 x1
y0
x x0 x0 x1
y1
a1x a0
其中:
可通过下述方法获得:每一段找出三点
立方程
yi1
ai
x2 i 1
yi1 ai xi21
bi xi1 bi xi1 ci
ci
yi ai xi2 bi xi ci
(2)把标准输入yi (i=1,2...n)值存储在存储器的某一
单元,把x i 作为存储器中这个存储单元的地址,把对应
的 yi 值作为该单元的存储内容,这样就在存储器里面
建立一张标定数据表。
(地3)址实,际读测出量该时地,址让中微存机储根的据y输i 即出为读对数应x的i 去被访测问量该的存真储值,
等距节点算法适用于非线性特性曲率变化不大的场合,每段曲线都用 一个直线方程代替。分段数n取决于非线性程度和仪表的精度要求。精 度越高,n越大。每段直线的方程为
P1i (x) a1i x a0i , i 1,2,..., n
因为每段的拟合误差 V一i 般都不同,拟合结果应保证
max Vi,max ,i 1,2,..., n
用非等距节点分段直线校正法
a11x a01 P1(x) a12 x a02
a13x a03
0 x a1 a1 x a2 a2 x a3
非等距节点分段直线插值
四、抛物线插值
如图所示将曲线分成四段,每一段都可以用一个二阶抛物线方程
y ai x2 bi x ci (i 1,2,3,4) 来描绘。其中,抛物线的系数 ai , bi , ci
a1
y1 y0 x0 x1
,
a0 y0 a1x0
若(x0,y0)、(x1,y1),取在非线性特性曲线f(x) 或数组的两端点A、B,如下图中的直线表示插值方程, 这种线性插值就是最常用的直线方程校正法
y y1
y
B
y1
B
L(x)
P(x)
f(x) y0
A
f(x)
y0
A
0
a
x
b
0
a
x b
Vi pn (xi ) f (xi ) ,i 1,2,...,n
Vi 表示拟合误差,如果对于所有的x的取值都满足 Vi
ε为允许的拟合误差,则直线方程 就是理想的校正方程。
显然,如果对于非线性比较严重或测量范围比较宽的非 线性特性,采用一种直线方程进行校正很难满足仪表的精 度要求。故
线性插值
等距节点分段直线校正法 非等距节点分段直线校正法
4.4.2.1 等距节点分段直线校正发
1.插值函数的常见形式―― m次多项式:
m
i
z (x) Pm (x) ai x
i0
2. 插值函数多项式系数的确定
从标定数据中选取 (m+1)组数据作为插值点,解以下 (m+1) 元方程组可求得(m+1) 个多项式系数 a0, a1, a2,am
一般来说,阶数m越高,逼近 f(x) 的精度越高,但阶数 越高,计算越繁冗,计算时间也会增加,故拟合多项式的 阶数一般不超过三阶。
4.4 非线性校正算法
4.4 非线性校正算法
校正的目的
从A/D转换的数据x,求出被测量的真值y,
称为标定或校正。
y 传感器
x
z
A/D
标定
X——由A/D送入微机的原始测量数据,Y——被测量的“真 值”,
Z——经过“校正”处理后,微机输出给显示器或控制器的数据
本节讨论
在 y=f(x)公式复杂和y=f(x)只有离散数据 两种情况下,由A/D转换结果x求取显示 数据z(要求z=y或误差在允许范围之内即 z≈y)的方法
所求的 a1i和存a0i入内部ROM中。实时测量时只要选用程序判断输入x
位于折线的哪一段,然后取得该段对应的
a进1i和行a计0i 算。
程序如下
4.4.2.2 非等距节点分段直线校正法
对于曲率变化较大的分线性特性,若要满足精度要求,分段数n就会
变得很大,同时
a1的i和数a0目i 也会增加,占用内存增加,故这时宜采
4.4.1 查表法
查表法就是将“标定”试验获得的n对数据x(i yi , )
(i=1,2,...n)在内存中建立一张输入/输出数据表,再根据 A/D数据x通过查这个表查的y,并将查得的y作为显示数 据z。具体步骤如下:
(1)在系统的输入端逐次加入一个个已知的标准被测
量 y1, y2... yn ,并记下对应的输出读数 x1, x2 ,..., xn 。
•(x
xi )
y
• 查表法优点 1)不需要进行计算或只需简单的计算; 2)Zi=yi为标定数据,不存在误差。
• 查表法缺点 需要在整个测量范围内标定实验测得很多的测试数据。
4.4.2 插值法 一、插值函数和插值点:
插值法是从标定或校准实验的n对测定数(xi,yi)(i=1,2,…,n)中, 求得一个函数 作为实际的输出读数x与被测量真值y的函数关 系 的近似表达式。这个表达式 必须满足两个条件:
第一, z (x的) 表达式比较简单,便于计算机处理。故
一般为多项式。
第二,在所有选定的校准点(也称插值点) 上满足:
z称)为 y f (x的) 插值函数。 插值点实际上就是 z (x和) y f (的x)相交点。
二、插值函数的常见形式及其求解
常用的校正算法: 查表法 插值法 拟合法
离散数据的获得
• 标定实验
在规定的实验条件下,给测试系统的输入端逐次加 入一个个已知的标准的被测量y1,y2…yn,并记下 对应的输出读数(A/D转换结果)x1,x2…xn。这样就 获得n对输入/输出数据(xi,yi),(i=1,2…n)这些“标 定”数据就是y=f(x)的离散方式描述。
将从表中查得的yi 作为显示数据 z ,应该说是不存在误
差的。
(4)若实际测量的输出数据x是在x i和xi1之间,可按最邻 近的一个标准读数x i 或xi1 去查找对应的yi 或yi1作为
被测量的近似值,很显然这个结果有一定的误差,可以
用线性内插进行修正,即按照下式子计算出要显示的数
据
z
yi
yi1 yi xi1 xi