振动沉拔桩机工作机构动态特性的计算机仿真
变偏心沉拔桩激振器的设计新方法

【作 者】车仁炜;陆念力
【作者单位】哈尔滨工业大学,机电工程学院,黑龙江,哈尔滨,150006;哈尔滨工业大学,机电工程学院,黑龙江,哈尔滨,1关文献】
1.振动时效装置激振器偏心块优化设计 [J], 邢晓林;张海军;闫霞
2.振动筛激振器偏心块拆卸专用工具的设计 [J], 赵嵩;徐国良;魏忠才
3.振动沉拔桩机激振器的设计及动力学分析 [J], 车仁炜;陆念力
4.振动沉拔桩机激振器电机启动过程分析 [J], 王国强;马若丁
5.偏心质量可调节惯性激振器设计与分析 [J], 段新豪;曲鹏哲;刘伟祥;张春华;陶颖;李鹏宇
因版权原因,仅展示原文概要,查看原文内容请购买
变偏心沉拔桩激振器的设计新方法
车仁炜;陆念力
【期刊名称】《中国工程机械学报》
【年(卷),期】2004(002)001
【摘 要】在分析以往的沉拔桩激振器优缺点的基础上,提出了一种新的设计方法,给出了其力学模型,并从激振力、偏心力矩、振幅及功率等方面论证了这种方法的可行性和优越性,最后通过比较,得出了相关结论,表明此种方法非常具有实用价值.
振动桩锤沉桩过程液化特性和贯入度数值分析

振动桩锤沉桩过程液化特性和贯入度数值分析罗春雷;贺建超;丁吉;夏毅敏【摘要】Vibratory pile and ground soil were chosen as objectives to study pile-soil interaction in liquefaction using finite element difference software FLAC3D. The numerical simulation model for ground soil liquefaction was established by using Finn constitutive relation;furthermore,the ground soil liquefaction during vibratory hammer driving was simulated by using fluid-solid interaction and dynamic time-history analysis module. By using FISH inner function of the code, the known variables were calculated. The process of soil liquefaction was described by excess pore pressure ratio and the effects of stimulating frequency, static loading and elastic modulus of the soil foundation on the liquefaction and driving penetration were analyzed. The results show that pile penetration speed increases with the increase of excess pore pressure ratio which is caused by vibration sinking pile. Within 20 Hz, the higher the vibration frequency applied, the faster the rising rate of excess pore pressure and the deeper of the penetration were observed. Enlarging the elastic modulus of the ground soil results in the increase of penetration resistance for sinking the pile . By increasing vibration frequency, the amount of static load is increased for submersing the piles.%以液压振动桩锤和地基土为研究对象,运用有限元差分软件FLAC3D的流固耦合动力时程分析模块,采用Finn液化本构关系建立了桩土相互作用液化数值分析模型,利用内置FISH函数,对已有的变量进行计算,引入超孔压比描述地基土液化情况,模拟地基土振动液化沉桩过程.分析了振动频率、静载荷和弹性模量对桩贯入度和液化特性的影响.研究结果表明:振动沉桩引起的超孔压比的增加可以提高桩的贯入度;激振频率在20 Hz以内,振动频率越高,超孔压比上升的速率越快,桩贯入度增加;地基土弹性模量增大,桩下沉阻力增大,使桩下沉困难,可通过提高激振频率,增加桩顶静载荷来实现桩的下沉.【期刊名称】《广西大学学报(自然科学版)》【年(卷),期】2011(036)006【总页数】7页(P923-929)【关键词】沉桩过程;液化特性;贯入度;数值分析【作者】罗春雷;贺建超;丁吉;夏毅敏【作者单位】中南大学机电工程学院,湖南长沙410083;中南大学机电工程学院,湖南长沙410083;77113部队,四川成都610000;中南大学机电工程学院,湖南长沙410083;中南大学机电工程学院,湖南长沙410083【正文语种】中文【中图分类】TU67液压振动桩锤是一种以油压力为驱动力,产生偏心激振、强迫桩土振动,使砂土液化以实现轻松沉桩的新型环保型桩工机械。
机械振动计算机仿真科技

机械振动计算机仿真科技提纲:1. 机械振动计算机仿真科技的意义和应用2. 振动计算模型的建立及相关算法分析3. 振动计算仿真技术的实现与优化4. 样例分析:基于振动计算机仿真的建筑结构优化5. 振动计算机仿真技术的未来趋势与挑战1. 机械振动计算机仿真科技的意义和应用振动计算机仿真技术是当今建筑领域中的重要技术之一,是指利用计算机技术对机械振动的性能进行模拟分析的过程。
在建筑领域中,机械振动计算机仿真技术主要应用于建筑结构和设备的设计和优化,能够进行三维振动计算、动力特性分析等。
机械振动计算机仿真科技的意义主要在于:● 研究现实中的振动环境对建筑的影响;● 分析机械振动对建筑结构的影响,提高建筑结构的抗震性能;● 帮助设计师快速得出各组合方式下的调整方案,在短时间内得到工程方案;● 节约时间和成本。
2. 振动计算模型的建立及相关算法分析振动计算机仿真技术的核心是建立可靠的振动计算模型,通过对振动力、振动速度、振动位移等参数进行计算和仿真分析,得出优化建筑结构的可行性方案。
振动计算模型的建立和优化需要采用不同的算法和方法。
常见的算法包括:● 有限元法:将振动问题转换成数学模型求解,是目前振动计算的一种常用方法;● 能量法:根据振动物体本身的动能和势能分析振动;● 频率响应法:按照一定的外力谱进行分析,适用于对低振动频率进行计算。
在建立模型时,需要考虑以下因素:● 模型应具备合理的几何形状和材料参数;● 模型对物理实际具有可行性;● 模型应考虑物理环境和力学条件的复杂性。
3. 振动计算仿真技术的实现与优化振动计算机仿真技术实现需要使用专业的计算机软件和硬件设备。
常用的仿真软件包括ANSYS、ABAQUS、MSC Nastran 等。
这类软件应该包含多种振动计算算法,并能够进行精度和速度的平衡。
在实现过程中,可以通过以下方法进行优化:● 减少非必要的计算量,使仿真过程更加高效;● 采用合适的计算模式和算法,平衡计算精度和速度;● 采用分布式计算,提高计算效率;● 针对不同的建筑项目,应定制化软件,提高用户体验度。
振动沉拔桩机的分类及特点

振动沉拔桩机的分类及特点振动沉拔桩机是建筑行业中常用的一种机械设备,用于将桩安装到地下或从地下抽出桩。
根据其特点和功能,振动沉拔桩机可以分为多种不同类型。
本文将介绍振动沉拔桩机的几种常见分类,并探讨它们各自的特点。
1. 振动沉拔桩机的分类1.1 按振动方式分类振动沉拔桩机根据振动方式不同可以分为两大类:共振式桩机和非共振式桩机。
共振式桩机利用施加的振动力与桩的固有频率达到共振,从而实现桩的沉拔作业。
这种类型的桩机对桩的振动频率和振动力有严格要求,需要专门的控制系统来确保操作的准确性。
它的主要特点是桩机本身振动幅度较小,可靠性高,沉拔效率较高。
非共振式桩机则不依赖于共振,而是通过外加的激振力将桩振动。
这种类型的桩机操作相对较简单,但由于振动力无法与桩的固有频率达到共振,因此需要更大的振动力,同时对操作员的操作技术要求也较高。
非共振式桩机适用于较硬的土层和岩石地质条件,其主要特点是适用范围广,且适用于各种材质的桩。
1.2 按工作方式分类振动沉拔桩机根据工作方式不同可以分为两类:静压桩机和沉拔桩机。
静压桩机通过外加的静压力将桩沉入地下,主要适用于较软土层和泥沼等地质条件。
它的特点是桩的沉入速度较慢,但是能够保证沉入的稳定性和垂直度。
沉拔桩机则通过振动力将桩沉入地下或抽出地面。
其特点是作业速度快,效率高,适用于各种地质条件。
沉拔桩机可根据桩在地下的作用力分为水平作用型和垂直作用型。
水平作用型主要用于桩侧面的沉拔作业,而垂直作用型主要用于桩端的沉拔作业。
沉拔桩机的振动力较大,对操作者的技术要求较高。
2. 振动沉拔桩机的特点2.1 高效快速振动沉拔桩机采用振动力进行桩的安装和拔出作业,作业速度快、效率高。
特别是沉拔桩机,由于振动力的作用,使得桩在地下与土层更好地接触,降低桩与土层之间的摩擦力,从而使得沉入或拔出速度更快。
2.2 适应性强振动沉拔桩机适用于不同地质条件和不同材质的桩。
通过合理选择振动力的大小、频率以及施加时间,可以应对各种不同地质条件的需求。
振动沉桩过程的动力学仿真分析
图5
激振力随时间变化曲线
Fig. 5 Excitation forcetime curve
压缩模量和粘结力, 桩下降的速度变慢, 的内摩擦角、 并且总沉降量降低很多。 增大土的内摩擦角, 会增大 桩土间的内摩擦力, 从而影响桩的沉入。 综合各组曲线图, 容易看出, 在本文所验证的桩 - 土系统参数, 激振力振幅、 频率以及土的材料性质中, 土的材料性质对桩的沉降影响最大。 增大土的内摩擦 会增大桩土间的内摩擦力, 从而影响桩的沉入; 增 角, 大激振器振幅, 可以增大沉降量; 振动频率越接近桩 - 土系统的固有频率, 沉降量也会相应增大。 除上述所验证的这些参数外, 改变静压力也能改 变桩的沉降, 此处不再验证。 这些参数除了对沉桩量 对桩和机座的振幅也有影响, 在施工过程 的影响外, 中, 应结合土质参数, 综合考虑各种影响, 选取合适的 以达到理想的沉桩效果。 桩机参数,
比较以上曲线看出, 在沉桩过程中, 桩的下降速度 越慢, 位移曲线越平缓, 这是因为随着桩的沉入, 桩侧 摩擦力越大, 桩端阻力也越大。 沉桩开始的很短时间 内, 沉桩阻力很小, 桩在静力、 激振力以及桩自重的作 此时桩的位移是一直向下的, 即没有向上的 用下下沉, , , 振动 在一个振动周期内 桩的位移只有大小的变化, 没有方向的改变。 随着沉桩位移的增大, 下沉的阻力 随之增大。在一个周期内, 桩的位移出现振动, 且下行 由于静力和自重的作用, 下行程中施加 程大于上行程, 在桩上的力大于上行程中施加在桩上 的 力。 总 体 来 说, 桩的位移趋势是向下的, 但是速度越来越小。当桩
材料
桩和土的材料属性如表 1 和表 2 所示。
表1 桩的材料属性 Tab. 1 Material properties of the pile 密度 弹性模量 泊松比 -3 E / MPa μ ρ / ( kg·m ) 0. 3 7 800 金属桩 2. 1 × 10 5 材料 表2 土的材料特性 半径 d/m 0. 1 长度 l /m 10
振动桩---flash视频动画演示
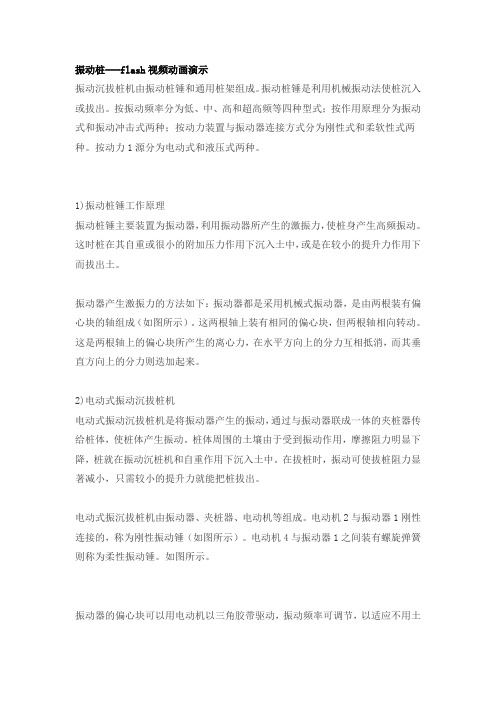
振动桩---flash视频动画演示振动沉拔桩机由振动桩锤和通用桩架组成。
振动桩锤是利用机械振动法使桩沉入或拔出。
按振动频率分为低、中、高和超高频等四种型式;按作用原理分为振动式和振动冲击式两种;按动力装置与振动器连接方式分为刚性式和柔软性式两种。
按动力1源分为电动式和液压式两种。
1)振动桩锤工作原理振动桩锤主要装置为振动器,利用振动器所产生的激振力,使桩身产生高频振动。
这时桩在其自重或很小的附加压力作用下沉入土中,或是在较小的提升力作用下而拔出土。
振动器产生激振力的方法如下:振动器都是采用机械式振动器,是由两根装有偏心块的轴组成(如图所示)。
这两根轴上装有相同的偏心块,但两根轴相向转动。
这是两根轴上的偏心块所产生的离心力,在水平方向上的分力互相抵消,而其垂直方向上的分力则迭加起来。
2)电动式振动沉拔桩机电动式振动沉拔桩机是将振动器产生的振动,通过与振动器联成一体的夹桩器传给桩体,使桩体产生振动。
桩体周围的土壤由于受到振动作用,摩擦阻力明显下降,桩就在振动沉桩机和自重作用下沉入土中。
在拔桩时,振动可使拔桩阻力显著减小,只需较小的提升力就能把桩拔出。
电动式振沉拔桩机由振动器、夹桩器、电动机等组成。
电动机2与振动器1刚性连接的,称为刚性振动锤(如图所示)。
电动机4与振动器1之间装有螺旋弹簧则称为柔性振动锤。
如图所示。
振动器的偏心块可以用电动机以三角胶带驱动,振动频率可调节,以适应不用土壤上打不同桩对激振力的不同要求。
夹桩器用来连接桩锤。
分液压式、气压式、手动(杠杆或液压)式和直接(销接或圆锥)式等。
如图所示为振动冲击式振动桩锤。
它沉桩即靠振动又靠冲击。
振动器和冲击板经由弹簧相连。
两个偏心块在电动机带动下,同步反向旋转时,在振动器1作垂直方向振动的同时,给予冲击凸块以快速的一连串的冲击,就使桩迅速下沉。
这种振动冲击式桩锤,具有很大的振幅和冲击力,其功率消耗也较少,适用在粘性土壤或坚硬的土层上打桩。
其缺点是冲击时噪音大,电动机受到频繁的冲击作用易损坏。
振动沉拔桩机动态特性的频域仿真
c/ ・ 1 c. ・ I Ns m一 2 Ns m—l c / ・ / 3 Ns m l 0 4×1 3 . 0 6 8×1 j O 0 2×1 3 0
.
1 m1 ) 变化下 的桩 机幅频 响应 可 以看 出 :. 振动 桩锤一土 ” a“ 的振 动系统 有两个 固有频 率 。在 一 阶共振频 率 附近时 桩管 的共 最 大共 振峰。此时横梁振幅达到 3 Omm, 已经远远超过 了安 全标
参考文献[] 复数法 解此 方程 组 , 2用 设该 方程组 的稳 态 复数 振 峰小 于横梁的共振 峰 。二 阶 固有频 率处 桩管 与横梁 一起 达到
作者简介 : 蒋云飞 (99 )女 , 17 , 石家庄铁道学 院机械工程分院硕士研究生 , 河北 石家庄 0 04 50 3
杨艳红 (9 0 )女 , 18 , 石家庄铁道学 院机械工程分院硕士研究生 , 河北 石家庄 0 0 4 50 3
文献标识码 : A
引言
随着振 动沉拔 桩机在建筑 工程 和水利 工程 中的广 泛应 用 , 对
桩机 动态特性 的研 究显得 尤 为重 要。近年 来仿 真技 术及优 化设
A F , F lf 0 A nZz =√  ̄+ =/
上式 中的 n, , , z,各值为 : b c d, ,
振 动 沉 拔 桩 机 动 态 特 性 的 频 域 仿 真
蒋 云 飞 杨 艳 红
摘 要: 通过解振 动成 桩机 的数学模型得到 了 幅与频率的关 系表达 式, 据这 一结果 用 Maa 软 件进行 不 同参 数 改 振 根 db
变下的幅频响应仿真 , 直观地反映 了激振频率 与各 参数 的关系。 关键词 : 振动沉拔桩机 。 幅频 响应 , t b仿真 Mal a 中图分 类号  ̄ U6 1 T 7
液压振动锤振动沉桩土体参数辨识与仿真
Abstract : Describes the working principle of hydraulic vibration hammer. The single degree of freedom model of hammerpilesoil was established. The application of adaptive vibratory pile was brought forward innovatively based on resonance theory, and a method of online measuring soil parameters was also put forward. The results show that the model of extended least squares algorithm with a forgetting factor can identify the soil parameters online well. Key words: hydraulic vibration hammer; vibration pile driving; adaptive; soil parameters; online identification
振动沉拔桩机的发展历程与趋势
振动沉拔桩机的发展历程与趋势振动沉拔桩机是一种常见的土木工程设备,用于施工中的桩基处理。
随着城市建设的不断发展和技术的进步,振动沉拔桩机也经历了历史的发展进程。
本文将介绍振动沉拔桩机的发展历程以及当前的发展趋势。
振动沉拔桩机最早出现于20世纪50年代,当时主要是采用螺旋输桩机进行桩基施工。
这种机械利用扭力原理进行驱动,但其制造工艺相对简单,适用范围有限。
随着科学技术的不断进步,20世纪60年代出现了第一代振动沉拔桩机。
这种新型设备利用离心力的原理进行桩基施工,既提高了工作效率,又降低了施工难度。
随着振动沉拔桩机的问世,土木工程的发展进入了一个新的阶段。
1960年代至1980年代,振动沉拔桩机逐渐被应用于沉拔预制桩的施工中。
其独特的工作原理,通过振动分离土层、减少过程中的摩阻,使得桩基施工更加快捷高效。
此外,振动沉拔桩机还能够适应不同类型的地质环境,提高了施工的适用性。
随着科技的进步和振动沉拔桩机技术的不断创新,20世纪90年代,第三代振动沉拔桩机问世。
第三代振动沉拔桩机采用电液伺服控制系统,可以实现更精确的控制和操作。
与此同时,新增了数据采集和监控系统,提高了施工质量的可控性和监测能力。
进入21世纪后,振动沉拔桩机继续保持着稳定的发展趋势。
随着城市建设规模和施工任务的不断扩大,振动沉拔桩机的巨大需求推动了技术的进步和设备的完善。
现代化的振动沉拔桩机具有更高的施工效率和更精准的施工质量,可以满足不同工程规模和复杂程度的需求。
当前,振动沉拔桩机的发展趋势主要体现在以下几个方面:1. 自动化技术的应用:随着自动化技术的不断发展,振动沉拔桩机也开始向智能化、自动化方向发展。
通过人机交互系统和智能控制算法,实现桩基施工的自动化操作和监控,提高施工效率和质量。
2. 环保节能技术的应用:在振动沉拔桩机的设计和生产中,越来越注重环保节能的理念。
采用高效的电液伺服系统和节能控制技术,减少设备的能耗和环境污染,实现可持续发展。
振动沉拔桩机在城市地下管道施工中的应用研究
振动沉拔桩机在城市地下管道施工中的应用研究振动沉拔桩机是一种在城市地下管道施工中广泛应用的重要设备。
它通过振动作用和外力对桩身进行沉入和拔出的作业方式,实现了高效、安全、节约的基础施工技术。
本文将从桩机的原理、施工过程、优势和应用案例等方面,对振动沉拔桩机在城市地下管道施工中的应用进行深入研究。
一、振动沉拔桩机的原理振动沉拔桩机采用了振动作用和外力相结合的原理。
在桩机作业过程中,通过振动器产生的垂直振动力使桩与周围土壤发生相互作用。
振动力的传递使土壤发生松动和液化,减小了桩身与周围土壤的阻力,从而实现了桩身的沉入。
而在拔出过程中,通过对桩身施加外力,使桩身与周围土壤分离,减小桩身与土壤之间的摩擦力,实现了桩身的拔出。
这种原理既提高了施工效率,又确保了施工质量。
二、振动沉拔桩机的施工过程1. 施工前准备:确定施工位置、选取正确的振动沉拔桩机型号、检查设备状态和安全设施等。
2. 现场准备:清理施工区域、测量土壤质量、安装施工设备等。
3. 沉入桩身:先将振动器放置在桩顶,在振动器的作用下,桩身开始沉入土壤。
通过调整振动频率和振动力,逐渐降低桩身与土壤的阻力,直到将桩身沉入到预定的深度。
4. 拔出桩身:沉入到预定深度后,开始拔出桩身。
通过施加外力,并逐渐降低摩擦力,将桩身与土壤分离,从而顺利地将桩身拔出。
5. 验收和清理:检查沉拔桩的质量和标高,进行必要的调整和修复。
清理施工现场,恢复原貌。
三、振动沉拔桩机的优势1. 施工效率高:振动沉拔桩机采用了机械振动和外力相结合的施工方式,操作简便高效。
相比于传统的打桩方式,施工速度更快,能够大幅度提高工程进度。
2. 施工质量好:振动沉拔桩机施工过程中,通过振动器的作用,桩身与土壤发生相互作用,有效地减小了桩身与周围土壤的阻力。
这种施工方式能够减小桩身沉入和拔出的阻力,确保桩的垂直度和稳定性。
3. 对周围环境影响小:振动沉拔桩机施工过程中振动范围有限,振动频率可调节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
uyαα21==
f 2 (u1, u1
u2,
y 1, y 2,
t)
(2)
yα2= u 2
f 1= - [ k 1y 1+ c2u 1+ k 2 (y 1- y 2) + c2 (u 1- u 2) ] m 1 f 2= 〔m Ξ2esinΞt+ k 2 (y 1- y 2) + c2 (u 1- u 2) - k 3y 2- c3u 2〕m 2
若 保 持 其 它 参 数 不 变, 将 k 2 减 小, 取 k 2 = 280kN m 进行计算时、y 1 - t、y 2 - t 曲线如图 4c 所 示, 此 时 桩 管 的 振 幅 为 8111mm , 横 梁 振 幅 为 119mm。 由此可以看出: 改变减振弹簧的刚度 k 2 对 桩管的振幅 y 2 无明显影响, 但会减小横梁的振幅
11
y 1。 图 4d 是桩管和横梁的幅频响应曲线。 由图可
见, 土的刚度即 k 3 不同时, 其幅频响应曲线也不相 同。土的刚度减小时, 曲线左移; 土的刚度增大时, 曲 线右移。由于共振点是获得最大振幅的点, 是理想的 工作点, 因此应根据不同的土壤状况选取不同的激 振频率。 5 结论
通过上述分析可得以下两点结论: (1) 隔振横梁的质量及弹簧的刚度对横梁幅值 影响很大, 而对桩管振幅影响不大。大的横梁质量及 小的弹簧刚度会有较好的减振效果。
(2) 本文提出的振动沉拔桩机工作机构动态特 性的仿真模型和求解方法可对桩机工作系统进行动 态特性分析及预测。
参 考 文 献 [ 1 ]徐业宣. 机械系统动力学. 机械工业出版社, 1991 年 [ 2 ]金先级. 机电系统的计算机仿真。 清华大学出版社, 1991
年 [ 3 ] [ 日 ]伊藤广 著. 徐凤燕 译. 未来机械设计. 人民交通出
计算和结果的图形显示。 可实现对系统动态特性的 预测及修改。 2 桩机工作机构的振动分析及数学模型的建立
振动沉拔桩机工作机构如图 1 所示。 在振动器 工作时, 电动机带动两组偏心块作相反方向的转动, 使它们产生的横向离心力相抵消, 而垂直离心力相 迭加, 在这一激励力的作用下, 桩身产生沿其纵向轴 线的强迫振动, 当桩的强迫振动与土壤的自然频率 一致时, 土颗粒产生共振, 此时土颗粒有最大的振 幅。 足够的振动速度和加速度能迅速破坏桩和土间 的粘结力, 使桩身与土壤从压紧状态过渡到瞬时分 离状态, 沉桩阻力尤其是侧面阻力迅速减小。
0159
c2 kN ·s m
315
c3 kN ·s m
015
m eΞ2 kN 260
Ξ rad s 1021625
图 4 输出结果
以原参数进行计算时, y 1- t、y 2- t 曲线如图 4a 所示, 我们可以直观地看到桩机从启动到平稳过程 中, 振动器向桩管和横梁传递振动的幅值大小, 稳态 时桩管的振幅 811mm , 横梁振幅为 214mm。
在对振动沉拔桩机工作机构进行力学分析之 前, 我们假设:
1) 减振弹簧和加压提升钢绳的质量不计, 视为 无质量弹簧。
2) 除减振弹簧和钢绳外其它振动体都看成刚 体。
图 1 振动沉拔桩机工作机构示意图 11 桩架 21 提升滑轮组 31 提升钢绳 41 横 梁 51 上弹簧 61 振动器 71 下弹簧 81 桩 管 91 加压钢绳 101 平台上加压滑轮
选用四阶龙格2库塔法作为求解方程组 (1) 的数
值方法。
首先令 yα1= u1, yα2= u 2 则 yβ1= uα1, yβ2= uα2
于是将原方程组中的 yβ1, yα1, yβ2, yα2 用上述
关系式代换, 经过必要的整理, 即得到符合龙格
2库塔法要求的规范一阶微分方程组的形式。 uα1= f 1 (u 1, u 2, y 1, y 2, t)
c3i=
T f i[u1 (k) +
c21 2
,
u
2
(k
)
+
c22 2
,
y 1 (k ) +
d 21 2
,
y 2 (k)
+
d 22 2
,
k
+
1 2
]
(4)
d 4i= T [u i (k) + c3i ]
c4i= T f i [u1 (k ) + c31, u2 (k ) + c32, y 1 (k )
关键词: 铲运机 工作机构 数学模型 仿真技术
1 图形仿真技术的数学模型 111 运动学模型
图 1 为W JD 115 铲运机工作机构的运动学数学
图 1 工作机构数学模型
模型示意图, 该铲运机采用六杆正转工作机构。分析 中采用各杆件的几何长度及相关运动学参数作为设 计变量。 表为:
X (1) ——大臂铰点 B 0 到桥心 01 的水平距离 X (2) ——大臂铰点 B 0 到桥心 01 的垂直距离 X (3) —— 翻斗油缸铰点 B 2 到桥心 01 水平距
设计·计算
振动沉拔桩机工作机构 动态特性的计算机仿真
吉林工业大学
王 建 王国强 王殿学
沈阳重型机器厂
王庆学
内容摘要: 本文对振动沉拔桩机工作机构的纵向振动进行了分析, 建立了系统的动力学仿真模型。用 C 语言编 写了系统仿真程序, 并对实例进行了计算, 使工作机构的振动情况直观地显示出来。
若 保 持 其 它 参 数 不 变, 将 m 1 减 小, 取 m 1 = 260kg 进行计算时, y 1 - t、y 2 - t 曲线如图 4b 所示, 此时桩管的振幅为 8108mm , 横梁振幅为 319mm。
《建筑机械》1998 年第 1 期
由此可见, 改变横梁的质量 m 1 对桩管的振幅 y 2 无 明显影响, 但会增大横梁的振幅 y 1。
(3) 为使上述方程组离散化, 须先将时间离散 化, 为此取等时间间隔为步长 T , 于是得到适用 于 微分方程组 (1) 的四阶龙格2库塔公式如 (4) 式:
d 1i= T ui (k)
c1i= T f i [u1 (k) , u2 (k ) , y 1 (k ) , y 2 (k ) , k ]
《建筑机械》1998 年第 1 期
图 2 简化模型 9
在此假设下, 桩机工作机构可简化为图 2 所示 的力学模型。 图 2 中 m 1 ——横梁质量
m 2 ——振动器质量与桩管质量之和 k 1 ——加压或提升钢绳的刚度 k 2 ——减振弹簧的刚度 k 3 ——土的刚度 (提升时为零)
c1 ——加压或提升钢绳的阻尼 c2 ——减振器的阻尼 c3 ——桩管与土之间的阻尼 m eΞ2 ——激振力 Ξ—— 激振角频率 图 2 所示两自由度系统的振动方程为:
离 X (4) —— 翻斗油缸铰点 B 2 到桥心 01 垂直距
离 X (5) —— 大臂举升油缸铰点 B 1 到桥心 01 的
水平距离 X (6) —— 大臂举升油缸铰点 B 1 到桥心 01 的
垂直距离 X (7) ——大臂举升油缸与大臂铰点 P 1 距大臂
铰点 B 0X ’方向距离 (局部坐标系) X (8) ——大臂举升油缸与大臂铰点 P 1 距大臂
c11 2
,
u
2
(k
)
+
c12 2
,
y 1 (k ) +
d 11 2
,
y
2
(k
)
+
d 12 2
,
k
+
1 2
]
d 3i=
T [ui (k) +
c2i 2
]
10
图 3 逻辑框图 《建筑机械》1998 年第 1 期
代入第 9、10 两式, 便求出了 u i (k + 1) 和y i (k + 1)。 计算一般是从 k = 0 (即初值 t= 0) 开始的, 依照上述 步骤, 就可以按时间步长顺序算出 u i (0)、y i (0)、u i ( 1)、y i (1)、u i (2)、y i (2)、…。 由算法可知, 这些值就 是对应于 t= 0、t= T 、t= 2T 、…时微分方程组 (1, 1) 中原函数 y i 的一阶导数值及函数值。而其中的序列 y 1 (0)、y 1 (1)、y 1 (2)、…和 y 2 (0)、y 2 (0)、y 2 (0) …即组 成了原方程组的数值解。
关键词: 振动沉拔桩机 动力学 计算机仿真
1 引言 随着振动沉拔桩机在建筑工程中的广泛应用,
对桩机动态特性的研究显得尤为重要。 如何在桩机 制造出来之前就可预测其动态特性, 如何修改其设 计参数以达到成孔效率高、桩机隔振效果好的目的 一直是桩机设计者关心的问题。
本文对由桩管、振动器、减振装置及加压提升钢 绳构成的工作机构进行了动力学分析, 建立了计算 机动力学仿真的数学模型, 并用计算机进行了仿真
m1 0
yβ1
c - c yα1
k1+ k2 - k2 y 1
0
0 m 2 yβ2 + - c c
yα2 +
- k2
k2+ k3
= y2
m eΞ2 sinΞt
(1)
3 模型的数值求解
311 数值积分方法的选择
求解微分方程 (1) 可采用的数值积分方里
版社, 1992 年
作者地址: 吉林省长春市吉林工业大学工程机械系 邮政编码: 130025 收稿日期: 1996. 10. 19
地下铲运机工作机构仿真技术的应用
吉林工业大学 孔德文 高秀华 胡铁华 袁宁
内容摘要: 概要介绍了铲运机工作机构的结构特点, 仿真技术的基本数学模型以及动态仿真技术的应用, 这对 该类产品质量的提高具有积极作用。