基于DSP基于DSP的改进疲劳驾驶检测系统
基于DSP的驾驶疲劳检测系统开发设计
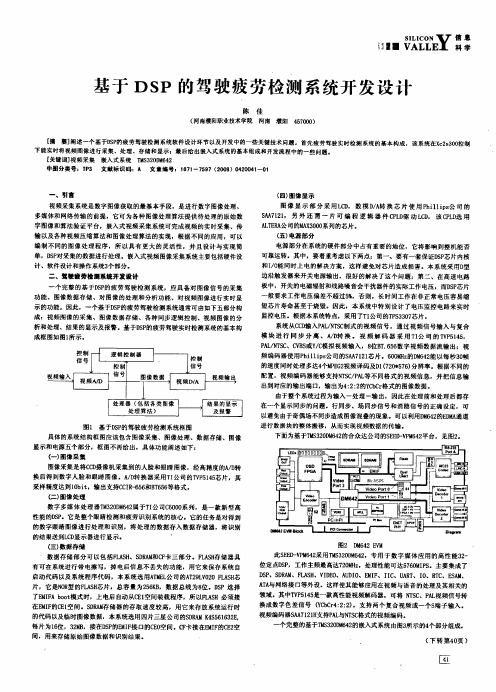
图像显示部分采用LC D,数模D A / 转换芯片使用Phi l iP 公司的 l s 5从7 2 ,另外还需一片可编程逻辑器件C D 11 L P 驱动L D C ,该C 选用 PLD L A A TER 公司的 X 0 O A M 30 系列的芯片。
(五) 电源部分
电源部分在系统的硬件部分中占有重要的地位,它将影响到整机能否
[关键词〕 视频采集 嵌入式系统 TM S320D 642 M
中图分类号: T P3
文献标识码: A
文童编号: 1671一7597 (20 8) 0420041一 0 01
一、引,
(四) 图像显示
视频采集系统是数字图像获取的最基本手段,是进行数字图像处理、
多媒体和网络传输的前提,它可为各种图像处理算法提供待处理的原始数 字图像和算法验证平台,嵌入式视频采集系统可完成视频的实时采集、传 输以 及各种视频压缩算法和图像处理算法的实现,根据不同的应用,可以 编制不同的图像处理程序,所以具有更大的灵活性,并且设计与实现简 单, P对采集的数据进行处理。嵌入式视频图像采集系统主要包括硬件设 s D 计、软件设计和操作系统3个部分。 二、妞驶使劳位洲系统开发设计 一个完整的基于D 的疲劳驾驶检测系统,应具备对图像信号的采集 P s 功能、图像数据存储、对图像的处理和分析功能、对视频图像进行实时显 示的功能. 因此,一个基于D P的疲劳驾驶检测系统通常可由 s 如下五部分构 成: 视频图像的采集、图像数据存储、各种同步逻辑控制、视频图像的分 析和处理、结果的显示及报警。基于D 的疲劳驾驶实时检测系统的基本构 P S 成框图如图1所示。
SIL IC
信息
科 学
夏簇 篡.
VA
基于 D s P 的驾驶疲劳检测系统开发设计
基于DSP的疲劳驾驶检测系统的研究

基于DSP的疲劳驾驶检测系统的研究苑玮琦;窦元杰【摘要】针对汽车驾驶员疲劳驾驶检测的要求,设计了一种基于图像处理DSP芯片DM6437的疲劳驾驶视觉检测系统.通过DSP的GPIO口用软件控制摄像头轴上和轴外的两种不同波长的近红外光源(850 nm/950 nn)交替采集驾驶员图像,根据亮瞳效应两帧图像差分后粗定位人眼,用模板检测提取人眼的边界,根据PERCLOS值方法判断驾驶员是否疲劳.根据人眼的不同状态分别处理,用蜂鸣器作为报警系统提醒驾驶员.实验表明,该系统简单实用,而且能够全天候准确快速地判断驾驶员是否疲劳.【期刊名称】《微型机与应用》【年(卷),期】2011(030)003【总页数】4页(P73-75,78)【关键词】疲劳检测;DSP;亮瞳效应;PERCLOS【作者】苑玮琦;窦元杰【作者单位】沈阳工业大学视觉检测技术研究所,辽宁沈阳,110870;沈阳工业大学视觉检测技术研究所,辽宁沈阳,110870【正文语种】中文【中图分类】TM769;TP39疲劳驾驶是造成交通事故的主要原因之一,根据公安部交通管理局发布的2009年全国道路交通事故情况显示,2009年,全国共发生道路交通事故 238 351起,造成67 759人死亡、275 125人受伤,直接财产损失9.1亿元,其中疲劳驾驶造成的事故占一定比重。
减少疲劳驾驶可以降低公共财产和个人人身财产损失,因此研究防疲劳驾驶系统具有重要的意义。
国内外有许多研究防疲劳驾驶监测系统,就目前来看,防疲劳监测系统并没有实现市场化原因有两点:一是各种方法都有一定的缺陷,比如用肤色变换提取人脸定位人眼的方法和灰度图像积分投影的方法因受光照影响,定位不准确;二是运行时间慢,达不到实时监测。
针对此两点不足设计了本系统。
本系统用轴上和轴外的不同波长的近红外光采集图像,根据亮瞳效应分别能得到亮瞳孔图像和暗瞳孔图像,差分后快速定位人眼,用模板检测提取人眼边界,判断疲劳状态。
《基于深度学习的疲劳驾驶检测系统的设计与实现》范文

《基于深度学习的疲劳驾驶检测系统的设计与实现》篇一一、引言随着道路交通日益繁忙,驾驶过程中的安全成为越来越重要的问题。
其中,疲劳驾驶作为常见的交通安全隐患,对于道路交通的威胁日益严重。
基于深度学习的疲劳驾驶检测系统以其强大的数据处理和模式识别能力,能够实时监控驾驶员的状态,有效地降低疲劳驾驶的风险。
本文旨在介绍一个基于深度学习的疲劳驾驶检测系统的设计与实现过程。
二、系统设计(一)需求分析首先,我们明确了系统的基本需求,包括实时性、准确性和易用性。
实时性意味着系统能够及时地捕捉到驾驶员的疲劳状态并给出警告;准确性是系统检测的精确度,这是决定系统有效性的关键因素;易用性则关系到系统的普及程度。
(二)硬件设计为满足实时性和准确性要求,我们采用了高分辨率的摄像头和性能稳定的计算设备作为硬件基础。
同时,考虑到车载环境的特殊性,我们还对设备的防震、防尘等特性进行了特别设计。
(三)软件设计软件设计是本系统的核心部分,主要包括数据采集、预处理、特征提取、模型训练和结果输出等模块。
我们采用了深度学习技术中的卷积神经网络(CNN)进行特征提取和模型训练。
三、数据采集与预处理(一)数据来源数据来源主要包括实际道路行驶中的视频数据以及公开的驾驶行为数据集。
通过对这些数据进行标注,我们可以为后续的模型训练提供丰富的数据资源。
(二)数据预处理在数据预处理阶段,我们主要进行图像的归一化、去噪、裁剪等操作,以便于后续的特征提取和模型训练。
同时,我们还需对数据进行标签化处理,即根据驾驶员的疲劳状态对数据进行分类。
四、特征提取与模型训练(一)特征提取在特征提取阶段,我们采用了卷积神经网络(CNN)进行特征的自动提取。
CNN具有强大的特征提取能力,能够从原始图像中提取出有效的视觉特征。
(二)模型训练在模型训练阶段,我们使用了深度学习中的分类算法进行模型的训练。
通过大量的训练数据,我们可以优化模型的参数,提高模型的准确性和泛化能力。
此外,我们还采用了迁移学习的方法,利用预训练模型进行微调,以加快模型的训练速度和提高模型的性能。
基于DSP的疲劳驾驶检测仪研制

基于DSP的疲劳驾驶检测仪研制
王峰;孟哲;易威
【期刊名称】《医疗装备》
【年(卷),期】2005(018)012
【摘要】通过设计一种高输入阻抗,低噪,抗干扰性强的前端表面肌电信号(SEMG)采集器将驾驶员的腰部肌肉疲劳信号采集到DSP处理器上.采用小波分析的方法确定肌肉疲劳过程中表面肌电信号的特征.选择与M波形状相似的gaus1小波函数,对其两个半波进行小波变换,分别分析两个半波在时域波形的拉伸程度,确定以小波变换尺度为主要依据的肌肉疲劳指数,实现疲劳状态在DSP处理器上的定量描述.从而实现疲劳驾驶检测.
【总页数】4页(P9-12)
【作者】王峰;孟哲;易威
【作者单位】武汉理工大学信息工程学院,湖北,武汉,430063;武汉理工大学信息工程学院,湖北,武汉,430063;武汉理工大学信息工程学院,湖北,武汉,430063
【正文语种】中文
【中图分类】TH772+.2
【相关文献】
1.基于ADSP-BF609的驾驶员疲劳检测系统研究 [J], 刘征宇;吴丽红
2.基于DSP虹膜识别防疲劳驾驶报警系统的研究 [J], 何明山;罗卫东;陈启新;张立
3.基于头部位置特征的疲劳驾驶检测仪 [J], 田文杰;刘继承
4.基于DSP人脸特征识别的司机疲劳驾驶预警系统研究 [J], 肖祖铭;周云鹏;郭瞻
5.基于DSP的疲劳驾驶视觉检测与预警系统设计 [J], 王欣;吴键;孙涵;周建荣因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP/BIOS的疲劳驾驶实时监测系统的设计

基 于 D P BO S / I S的疲 劳 驾驶 实 时监 测 系统 的设 计
张松林 , 郭 静
( 河南机 电高等专科学校 , 河南 新 乡 4 30 ) 5 0 0 摘要 :疲劳驾驶 引起 的交通事故在交通事故总数中 占了很大 的比重。文 中提 出利用 D P构建 疲劳驾驶 实时监测 S 系统。 利用 T 3 0 M 4 MS2 D 6 2的实时操作 系统 内核 D P BO , S / I S 借助 P R L S方 法实现疲 劳程度监测 , E CO 预防和减少 交 通事故的发 生。同时利 用接 口技 术, 实现 P c与 D P的通讯 联系与实时数据交换。 S
关键词 : S / I S 疲劳驾驶; E C O D P BO ; PR LS 中圈分类 号:P 9 . T 3 14 文献标 识码 : A 文章编号 :08— 0 3 2 1 )2- 04一 3 10 2 9 (0 10 0 2 o
I 引 言
随着科学技术发展 , 汽车在不断普及, 随之而来 的交通 事故也 越来 越多 , 路 交通 事 故 的发 生极 大 地 道
・ 稿 日期 :0 0 1.9 收 2 1 .】1 作者简介 : 张松林( 9 2 ) 男 . 18 ・ , 河南周 口人 , 助教 。 工程硕士, 主要从事模式识别研 究。
张松林等 : 基于 D P BO S / I S的疲劳驾驶实时监 测系统的设 计
R WI 通 R 用 高级趟 长指 令 字体 系 结 构 , 有 6 具 4个 3 2位通 用 寄 建 了 P D和 S 模块 , 过 新 建 的 P D对象 周 期 的 存器 , 8个 独 立 计 算 的 功 能 单 元 , 作 主 频 最 高 达 调用 S 对 象 的 中断 函 数 来 完成 我 们 设 定 的计 数 器 工 WI
基于DSP的驾驶疲劳检测系统的开题报告

基于DSP的驾驶疲劳检测系统的开题报告一、选题背景与意义近些年来,道路交通事故频繁发生,其中许多事故都是由于驾驶员疲劳行为所导致。
驾驶员的疲劳状态会导致注意力分散、反应速度变慢、决策不当等不良后果,给道路交通安全带来极大威胁。
因此,针对驾驶员的疲劳状态进行检测和预警,具有非常重要的价值和意义。
目前,驾驶疲劳检测技术主要有两种方法:生理学方法和行为学方法。
生理学方法主要基于生理指标(如心率、血压、皮肤电阻等)来监测驾驶员的身体状况;行为学方法则基于驾驶行为(如路线偏移、车速变化等)等指标,通过对比和分析来判断驾驶员的疲劳状态。
虽然这两种方法均有一定的可行性,但具体实施起来还存在很多限制和问题,如无法实时监测生理指标、易受外界干扰等。
因此,本项目将基于数字信号处理(Digital Signal Processing,DSP)技术,探索一种新型的驾驶疲劳检测方法。
本项目将采用行为学方法,通过对驾驶行为的分析,结合DSP算法对数据进行处理,最终实现驾驶疲劳状态的准确判断和预警。
本项目的研究成果将有望在汽车行业和交通安全领域得到广泛应用,具有重要的社会和经济价值。
二、研究内容与技术路线本项目的主要研究内容包括:1. 驾驶行为数据采集:使用车载摄像头和其他传感器(如GPS、加速度计等),采集驾驶员的行为数据,包括车辆速度、方向、加速度等信息。
2. 数据处理与特征提取:使用DSP算法对采集到的数据进行处理与特征提取,挖掘出反映驾驶员疲劳状态的特征,如路线偏移、频繁变道等。
3. 驾驶疲劳状态分类:根据特征提取结果,采用机器学习等方法,对不同的驾驶状态进行分类,如清醒状态、轻度疲劳状态、重度疲劳状态等。
4. 驾驶疲劳预警:根据分类结果,对驾驶员的疲劳状态进行预警,如使用语音提示、震动座椅等方式提醒驾驶员注意安全。
技术路线如下:1. 数据采集:使用车载摄像头、GPS、加速度计等传感器,采集驾驶员的行为数据。
2. 数据预处理:对采集到的数据进行预处理,包括数据滤波、数据对齐、数据归一化等操作。
基于DSP的驾驶员疲劳瞌睡检测系统
理系统。该 系统采用双摄像头控 制采集数据 , 以满足多路视频的实时采集 、 理 、 可 处 显示需求 , 可以作为疲劳检测算 法 的硬件平台 。本系统具 有结 构紧凑、 调节灵活 、 计算 准确 、 可靠性高 、 实时性 强的特点 。
关键词 :T 3 0 M62 A 1 5 P A ̄疲劳瞌睡检测 MS 2D 4 ;S A7 1 ;F G
a i l jsig acrtl aclt ,to el i gl ya ut ,cuae clu i s n ra t e d n y an g rg -m ̄
Ke  ̄o d : y r s TM S 2 DM 6 2 S 30 4 ; AA7 1 ; F ’ ; we r l e y d t c i n 15 I GA a y se p e e t o
是 1 W ; 0n
以如果 能找 到一种方 法 , 驾驶 中实 时检 测驾 驶 员 的机 能 在
状态 , 在他刚刚出现疲倦迹象时就发出报警 , 或强行减速 甚至强制停车休息, 那么就能有效提高安全系数。本文针
对疲 劳检测 算法 中 要 求 精确 定 位 人 眼 并 要 求 提高 精 度 的 人眼 图像 的需求 , 双 C D摄像 头捕获 驾驶员 红外 滤波 采用 C
0 引
言
检测算 法 中要精 确定位 人 眼 的要 求 , 用 了双 摄 像头 采 集 采 数据, 主要包 括 以下 设 备 :
驾 驶疲 劳/ 瞌睡是 指 由于 司机 长 时间 驾驶 或 睡 眠不 足 引发 的瞌 睡和 困倦 。据我 国交通 部 报道 , 由于 驾 驶疲 劳造 成 的交 通事 故无论 是绝 对数 字 还是 所 占比例都 是 最 高 的 。 驾驶疲 劳/ 睡 的 危 害 之 大 迫 切 需 要 对其 采 取 一 定 的措 瞌
《基于深度学习的疲劳驾驶检测系统的设计与实现》范文
《基于深度学习的疲劳驾驶检测系统的设计与实现》篇一一、引言随着交通量的不断增长,道路安全成为人们越来越关注的议题。
其中,疲劳驾驶已经成为导致交通事故的重要因素之一。
因此,为了提升驾驶安全,疲劳驾驶检测系统的设计与实现显得尤为重要。
本文将介绍一种基于深度学习的疲劳驾驶检测系统,该系统可以有效地识别驾驶员的疲劳状态,并通过实时监测和警报来预防因疲劳驾驶而导致的交通事故。
二、系统设计1. 硬件设计本系统主要由摄像头、计算机及显示屏等硬件组成。
其中,摄像头负责捕捉驾驶员的面部图像,计算机则负责处理这些图像信息,并通过显示屏将处理结果呈现给驾驶员。
此外,系统还配备了语音提示设备,当检测到驾驶员疲劳时,可通过语音提示来提醒驾驶员。
2. 软件设计本系统的软件部分主要基于深度学习算法进行设计。
首先,通过卷积神经网络(CNN)对驾驶员的面部图像进行特征提取。
然后,利用循环神经网络(RNN)对提取的特征进行序列分析,以判断驾驶员的疲劳状态。
最后,通过界面展示和语音提示等方式,将结果呈现给驾驶员。
三、深度学习算法实现1. 数据集准备为了训练模型,需要准备一个包含大量驾驶员面部图像的数据集。
这些图像应包括不同环境、不同光线条件、不同角度等不同情况下的面部图像。
此外,还需要对图像进行标注,以便模型能够学习到与疲劳相关的特征。
2. 模型构建本系统采用卷积神经网络和循环神经网络相结合的方式构建模型。
首先,通过卷积神经网络对驾驶员的面部图像进行特征提取。
然后,将提取的特征输入到循环神经网络中,进行序列分析。
最后,通过全连接层对分析结果进行分类,判断驾驶员是否疲劳。
3. 模型训练与优化在训练过程中,采用反向传播算法对模型参数进行优化。
通过不断调整模型参数,使模型在测试集上的准确率达到最优。
此外,还采用了数据增强、正则化等技巧来提高模型的泛化能力。
四、系统实现与测试1. 系统实现根据上述设计,我们开发了基于深度学习的疲劳驾驶检测系统。
基于DSP的疲劳驾驶实时检测算法实现
wi h a o s l o t m.Th w l o i t t e Ad b o tag r h h i e ne ag rt hm o s n tne d ala c r t e merc mo u e a d i a d e o e l c u ae g o ti d l n th s
2 o muiao nier gD pr e t hnd l t m ca i l ol e hnd 10 1 hn ) .C m nct nE g e n eat n,C eg uEe r ehnc l g ,C egu6 0 3 ,C ia ic :I emso e r a ta t n tr ft e l—t rv rf t u ee t n s se b s d O1DS h i d e a i e d tci y t m a e 1 me i g o P,te p p rp o o e h a e r p s sa n w ma y t t n l ss ag rt m a e n t e r go a r yf au e at ra a y i g t e a v ntg s e hu n e e sae a ay i l o i h b s d o h e in lg a e t r fe n l zn h d a a e a d d s d a a e ft ma y tt n lss ag rt m a e n t e Ho g r n fr me h d f r n ia v ntg so he hu n e e sa e a ay i l o h b s d o h u h ta so m t o o i
《基于深度学习的疲劳驾驶检测系统的设计与实现》范文
《基于深度学习的疲劳驾驶检测系统的设计与实现》篇一一、引言随着科技的发展,道路交通安全问题日益受到关注。
其中,疲劳驾驶是导致交通事故的重要原因之一。
为了有效预防和减少因疲劳驾驶引发的交通事故,本文设计并实现了一种基于深度学习的疲劳驾驶检测系统。
该系统能够实时检测驾驶员的疲劳状态,并提供相应的警报,以提高道路交通的安全性。
二、系统需求分析在设计和实现疲劳驾驶检测系统时,首先要对系统的需求进行分析。
系统需要满足实时性、准确性、稳定性和便捷性的要求。
具体来说,系统应能在驾驶员出现疲劳迹象时迅速检测并报警,同时要保证检测的准确性,避免误报或漏报。
此外,系统还需要具备稳定性,以确保在各种环境下都能正常工作。
最后,系统应具备便捷的操作界面,方便驾驶员和交通管理部门使用。
三、系统设计(一)硬件设计系统硬件部分主要包括摄像头、计算机等设备。
摄像头负责实时捕捉驾驶员的面部图像,计算机则负责处理这些图像数据。
为保证实时性和准确性,应选用高性能的计算机设备。
(二)软件设计软件部分主要包括图像处理模块、深度学习模型模块和警报模块。
图像处理模块负责将摄像头捕捉的图像数据进行预处理,以便后续的深度学习模型进行识别和判断。
深度学习模型模块是系统的核心部分,负责实现疲劳驾驶的检测功能。
警报模块则负责在检测到疲劳驾驶时发出警报,提醒驾驶员注意安全。
四、深度学习模型实现(一)数据集准备为训练深度学习模型,需要准备包含驾驶员面部图像的数据集。
数据集应包含正常状态和疲劳状态的图像数据,以便模型进行学习和判断。
(二)模型选择与训练本文采用卷积神经网络(CNN)作为疲劳驾驶检测的深度学习模型。
通过训练大量的图像数据,使模型能够识别出驾驶员的疲劳状态。
训练过程中,采用交叉验证的方法,以提高模型的泛化能力。
(三)模型优化与调整为提高模型的检测准确性和实时性,需要对模型进行优化和调整。
具体方法包括改进模型结构、调整参数等。
同时,还需要对模型进行定期更新和升级,以适应不同环境和场景下的检测需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DSP原理与应用院系名称:电气工程学院专业班级:电气F1201学生姓名:蔡佳翔学号: 201223910310基于DSP 的改进疲劳驾驶检测系统摘要:针对车载疲劳驾驶检测的应用,设计了基于TMS320DM642 嵌入式平台的疲劳检测系统。
首先在YCbCr 空间进行肤色分割,之后采用基于人眼特征的改进混合投影算法定位人眼区域,然后计算人眼区域的高度并判断人眼的睁闭状态,最后利用PERCLOS 算法对疲劳程度做出检测。
实验结果表明,该系统准确率高、实时性好,能很好地满足车载疲劳驾驶检测的需要。
本篇论文所针对改进的原论文为:○1孙晓玲,侯德文,储凡静.人脸识别中的眼睛定位方法[J].计算机技术与发展,2008 ,18 (10 ):46-48.○2王江波,李绍文.基于Adaboost 算法和模板匹配的人眼定位[J].计算机测量与控制,2012 ,20 (5 ):1347-1349.关键词: TMS320DM642;疲劳驾驶检测;混合投影;PERCLOS 算法。
随着近年来我国汽车数量的快速增长,交通事故的发生变得愈加频繁。
而疲劳驾驶往往是造成这些事故的主要因素,因此对防范疲劳驾驶的研究引起了众多学者和机构的广泛重视。
研究车载的疲劳驾驶检测系统,实现对驾驶员疲劳状态的监控,在保障驾驶员安全驾驶方面有重要的应用价值和实际意义。
在各种疲劳检测系统中,基于人眼参数的疲劳检测由于其准确率高、受主观因素影响小以及非接触的优点获得了广泛的应用。
其检测原理为驾驶员眼睛闭合频率与疲劳程度的相关性,如何准确地定位人眼是该类系统研究的主要问题。
目前常用的人眼定位方法有模板匹配法、霍夫变换法以及灰度投影法等。
模板匹配法事先选取人眼的模板,通过在图像中进行匹配来定位人眼。
但其准确度十分依赖选取的模板,且定位过程中需要匹配左右两只人眼,计算量较大、实时性差。
霍夫变换法[3]提取待检测图像的边缘,用霍夫曼的圆检测法定位人眼。
该方法要求边缘提取具有较好效果,并且图像中的眼球具有明显的圆形特征。
这意味着对原图进行大量的预处理,并且当人眼闭合或半闭合时检测率降低。
灰度投影法[4]对人脸图像的灰度值进行投影统计,再根据极值点的位置定位人眼。
该方法计算量小、运算速度快,但是容易受到眉毛部分的影响。
本文设计了基于TMS320DM642 图像处理硬件平台的车载疲劳驾驶检测系统。
为了尽量提高系统的实时性、保证驾驶员的驾驶安全,系统采用实时性最好的灰度投影法进行人眼的定位,并在此基础上针对灰度投影法的不足进行了改进。
整个疲劳驾驶检测系统实现了对驾驶员疲劳程度的检测, 并且有较高的准确率和实时性,具有很好的实用性。
1 系统硬件平台本系统硬件平台采用DSP 芯片TMS320DM642 作为核心处理器, 外设模块包括视频解码与编码模块、SDRAM 内存模块、时钟模块、电源与复位模块等。
视频解码模块采用1 片SAA7113 ,将摄像机采集的模拟视频信号解码为BT656 (YCbCr 4 :2 :2 ) 格式的复合视频信号, 分辨率为720 ×576 。
视频编码模块采用1 片SAA7105 , 将视频口2 输出的疲劳检测后的图像信号编码为模拟视频信号。
SDRAM 模块采用2 片MT48C4M32芯片,总空间大小为32 MB 。
系统通过模拟摄像头采集视频,经由SAA7113 解码送入DM642 的视频0 ,然后将视频数据经由EMIF (External Memory Interface )搬移到SDRAM 中进行处理[ 6] ,最后将处理好的视频数据送入视频口2 ,由SAA7105 芯片编码为模拟信号后输出到监视器显示。
硬件平台结构如图1 所示。
TMS320DM642ClockPower&ResetVP0VP1EMIF InterfaceSDRAMSAA7113SAA7105图1硬件平台结构框图2 疲劳检测算法的研究如何提高人眼定位的准确率是疲劳检测的主要研究内容,常用的人眼定位方法有:模板匹配法、霍夫变换法以及灰度投影法等。
其中模板匹配法和霍夫变换法定位精度高,但是运算量较大,难以实时检测驾驶员的疲劳程度。
灰度投影法算法简单、运算速度快,较为适合本文的实时疲劳检测。
根据上述分析,本文采用实时性最好的灰度投影法来定位人眼,并针对常用的灰度投影法进行了改进。
针对积分投影算法精度不高和易受眉毛部分干扰的问题,采用了基于人眼特征的改进混合投影算法来实现人眼的准确定位。
疲劳检测主要流程为:肤色分割、人眼定位、疲劳检测。
首先在YCbCr 空间进行肤色分割,得到人脸肤色区域,并根据人脸“三庭五眼”的特征框定出人眼检测区域;之后在灰度图像的待检测区域内采用改进混合投影算法进行人眼定位, 最后对驾驶员的疲劳状态做出判断。
算法流程如图2 所示。
原始图像YCbCr 空间的肤色分割改进的混合投影法定位人眼RERCLOS 疲劳监测图2 疲劳检测算法流程2.1 基于YCbCr 空间的肤色分割本文首先根据人类肤色在YCbCr 颜色空间的聚类性,根据各像素的Cb 和Cr 值将原始图像二值化为肤色区域和非肤色区域。
之后根据二值图像和人脸“三庭五眼”的特征,在原始图像的亮度分量中标记出人脸区域和去除了眉毛的人眼检测区域。
后续定位只在人眼检测区域内进行, 在降低运算量的同时提高了定位的准确率。
图3 分别为原始图像、肤色分割后的二值图像、框定的人脸区域、以及人眼检测区域。
(a )原始图像(b )肤色分割(c )人脸区域(d )人眼区域图3确定人眼检测区域2.2 人眼定位2.2.1 基于人眼特征的改进混合投影算法传统的灰度投影算法大多采用积分投影实现,该方法根据人眼区域内像素的灰度明显低于其他区域的特性,分别在水平和垂直方向上统计各行和各列像素灰度的均值,并找出均值最小的行和列作为人眼中心位置的水平和垂直坐标,实现人眼中心位置的定位。
并进一步以该位置为中心,分别向上下和左右方向查找各自均值的极大值,从而完成人眼上下和左右边界的定位。
由于该方法只考虑了灰度的均值变化,因此当某一区域内的灰度均值相同时,无论该区域内各像素点的灰度呈何种分布都无法进行区分[7] 。
因此人眼定位精度不高且定位结果容易受到眉毛部分的干扰,导致定位不准确。
经分析可知,灰度图像中人眼区域的像素具有其特有的灰度分布特征。
在水平投影方向,人眼区域的灰度值变化很剧烈,灰度的方差值很大,且越靠近人眼中心越大。
而眉毛附近像素的灰度值变化却较平稳,灰度方差较小,使得人眼和眉毛具有很明显的差异。
同时,在垂直投影方向,人眼区域的像素也有相同的分布特性。
因此本文采用一种混合投影算法定位人眼,即采用均值函数和方差函数的加权值作为人眼的定位函数,实现对灰度总体分布和局部变化的同时反映。
混合投影函数如下:1∂(、H(x )和、H(y )分别为垂直和水平方向上归一化后的灰度方差和均值[7] 。
进一步分析可知,该混合投影函数无论是在水平还是垂直方向上,积分项和方差项所占的权重均相同,不具有真实人眼的灰度分布特征。
人眼区域的灰度在水平方向上变化明显,具有很强的方差特征;而在垂直方向上变化相对平稳,均值特征更为明显。
因此本文分别对水平投影和垂直投影中的积分项和方差项赋予不同的权重,水平混合投影增大方差项滓(y )的权重,而垂直混合投影则增大积分项H(y )的权重。
经过多次反复试验,发现当采用式(3 )和式(4 )的权值时,人眼定位的效果最好。
故最后确定的改进投影函数如式(3 )、(4 )所示。
2.2.2 人眼定位步骤人眼检测区域主要包含人眼和眉毛部分,其中眉毛会对人眼的定位产生影响。
由于人眼的水平投影具有很大方差,和眉毛有明显区别。
故先水平投影确定人眼上下边界后,再在该边界内垂直投影确定人眼左右边界,以减小眉毛对人眼左右边界定位的影响,实现人眼的准确定位。
由于在行车过程中驾驶员会不停转动头部,会出现只能检测到一只人眼的情况。
因此本文只检测更接近画面中心的一只人眼,根据双眼状态的一致性,另外一只人眼也应该具有相同的睁闭状态,这样既提高了检测准确率,也降低了运算量。
具体步骤如下:(1 )计算框定的人脸区域左边界到人眼检测区域左边界距离Ll,以及人脸区域右边界到人眼检测区域右边的距离Lr。
若Ll≤Lr ,则说明驾驶员头部向左转动,此时右眼更接近画面中心,后续步骤中只定位右眼。
反之,则定位左眼。
(2 )在人眼检测区域内进行水平投影,查找投影最大值出现的行,该行即为人眼垂直中心位置。
再从该位置分别向上和向下查找投影极小值出现的行,得到人眼的上下边界Eyeup、Eyedown。
(3 )在人眼上下边界内的人眼检测区域中进行垂直投影,得到人眼的水平中心位置和左右边界Eyel 和Eyer,完成人眼的定位。
实验过程中采用基于人眼特征的改进混合投影算法分别对多个角度的人脸进行了人眼定位,并与积分投影定位和传统混合投影定位进行了结果对比,结果如图4 所示。
实验结果表明:由于只对灰度总体分布进行统计,使得传统的积分投影定位容易受到眉毛的干扰,甚至将眉毛误检测为人眼;而传统的混合投影由于没有考虑人眼区域特有的灰度分布特征,使得对于人眼边界的定位精度不高;而本文所采用的投影算法能够更加准确地对人眼各边界进行定位。
(a)积分投影定位(b)传统混合投影定位(c)改进混合投影定位图4 三种不同定位方法定位人眼结果2.3 疲劳检测本文采用PERCLOS 算法来判断驾驶员的疲劳程度。
PERCLOS 即单位时间内人眼闭合时间所占百分比,在本文中的计算公式为:本文定义人眼区域的上下边界之差Eyeup-Eyedown 即为人眼高度eyeH,当eyeH 小于1/5 最大值时认Array为人眼高度eyeH,当eyeH 小于1/5 最大值时认为人眼闭合。
设定为每隔100 帧计算一次PERCLOS 值,当PERCLOS 值大于0.4 时判断驾驶员处于疲劳状态。
实现源程序:驾驶员疲劳、清醒和不确定时的标准对上表中驾驶员的特征参量的三组采样值根据D-S证据理论进行融合,matlab融合程序代码如下所示:/*求取PRECLOS特征的m函数,T、W为选定的标准,TT、WW为实时采集的特征值*/l=0;h=0;g=0;for i=1;1;3r(i)=T(i)*TT/(TT^2+T(i)-T(i)*TT);l=l+r(i);endfor j=1;1;3m(j)=r(j)/1end/*求取闭眼时间参数的m函数*/for i=1;1;3rr(i)=W(i)*WW/(WW^2+W(i)^2-W(i)*WW);endfor j=1;1;3n(j)=rr(j)/hend/*算出两个特征融合后的m函数D*/K=0;for i=1;1;2for j=1;1;2if i~=jK=K+C(i,j);endendendfor i=1;2m(i)=(C(i)+C(i,3)+C(3,i))/(1-K);D(;,j)=[m(i)];endm=C(3,3)/(1-k);D(;,3)=[m];将融合后的D作为新的m函数与下一个特征参数用同样的方法进行信息融合。