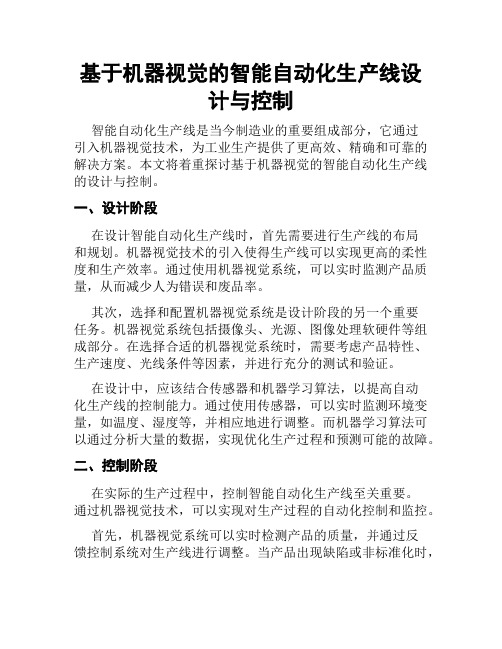
智能自动化-机器视觉检测系统的经典结构
基于智能机器视觉的针剂生产线安瓶检测识别系统

前 ,在 国 内外还 没看到 类似检测 案例及 检测装 置 。 本系统用新型检测手段和方法,综合应用 智能 图像检测识 别 技术 、计 算机技术 、 自动检测 与转换技 术对采集到 的数据
自动 识 别 处 理 , 计 划 研 制 出一 套 具 备 能在 线 自动 识 别 、 检 测
_
图 1 智能机 器视 觉检测系 统示意 图
DV 5 0成像效果如 图 2 T l 所示 。位置三为缺支情况 ,位置
七 为 安 瓶 破 损 ,其 它 位 置 为 正 常 : 。 图 2是 未 经 处 理 的 原 隋况
类 的视 觉范 围 ; () 3长时间工作。人类 难以长时间地对 同一对象进行观察 。
以根 据 封 闭 的 b o l b块 数 目判 断 一 盒 药 “ 格 ”和 “ 合 格 ” 合 不 。
RJ j c - 45 ● k
图 6 I 电缆接 线图 / O
Fco ut n i I , 1 O I , O2
I ,3 0
电缆线颜 色 黄 色 紫 色
白色 橙 色
佳 。光 纤 传 感 器 作 为外 部 触 发 信 号 , 当 被 检测 药 盒 在 生产 线 上
流 动时 ,光 纤传感 器给 出触 发信号 ,DVT 0采集 图像 。 5 1
伤 ,而 提 高 了系统 的可靠 性 ; () 2具有较 宽的光谱响应 范围。机器视觉则可以利用专用的
光 敏 元 件 , 可 以观 察 到 人 类 无 法 看 到 的世 界 , 从 而 扩 展 了 人
安 瓶是否多支 、缺支 、空瓶等功 能并实现 对其报警 、计数显
基于机器视觉的智能自动化生产线设计与控制
基于机器视觉的智能自动化生产线设计与控制智能自动化生产线是当今制造业的重要组成部分,它通过引入机器视觉技术,为工业生产提供了更高效、精确和可靠的解决方案。
本文将着重探讨基于机器视觉的智能自动化生产线的设计与控制。
一、设计阶段在设计智能自动化生产线时,首先需要进行生产线的布局和规划。
机器视觉技术的引入使得生产线可以实现更高的柔性度和生产效率。
通过使用机器视觉系统,可以实时监测产品质量,从而减少人为错误和废品率。
其次,选择和配置机器视觉系统是设计阶段的另一个重要任务。
机器视觉系统包括摄像头、光源、图像处理软硬件等组成部分。
在选择合适的机器视觉系统时,需要考虑产品特性、生产速度、光线条件等因素,并进行充分的测试和验证。
在设计中,应该结合传感器和机器学习算法,以提高自动化生产线的控制能力。
通过使用传感器,可以实时监测环境变量,如温度、湿度等,并相应地进行调整。
而机器学习算法可以通过分析大量的数据,实现优化生产过程和预测可能的故障。
二、控制阶段在实际的生产过程中,控制智能自动化生产线至关重要。
通过机器视觉技术,可以实现对生产过程的自动化控制和监控。
首先,机器视觉系统可以实时检测产品的质量,并通过反馈控制系统对生产线进行调整。
当产品出现缺陷或非标准化时,机器视觉系统可以自动识别并发送信号给控制系统,以及时处理、修正或拒绝该产品。
其次,机器视觉系统可以实现对生产线环境的监测和控制。
通过监测环境变量,如温度、湿度等,系统可以根据预设的标准值自动调整生产线参数,保证产品质量和生产效率。
此外,机器视觉系统还可以应用于生产线的负载均衡和调度。
通过监测生产线的运行状态和产品需求,系统可以自动调整每个工作站的工作时间和任务分配,以实现生产线的最优效率和生产能力。
三、挑战与未来展望虽然基于机器视觉的智能自动化生产线带来了许多好处,但同时也面临一些挑战。
首先挑战在于机器视觉系统的对比度和稳定性。
当产品在生产线上高速移动时,图像的对比度可能不佳,导致机器视觉系统无法正确检测和识别产品。
基于双目视觉的机械零件位姿检测系统研究

算法实现:使用编 程语言实现算法, 并进行测试和验证
算法评估:对算法 进行评估,比较与 其他算法的优劣
测试目的:验证机械零件位姿 检测系统的准确性和可靠性
测试环境:实验室和实际生产 线
测试方法:对比实验、重复测 试和异常测试
测试结果:高准确率和低误差 率
相机标定是确定相机内 部参数和外部参数的过 程,通过标定可以获得 相机的高精度模型。
双目立体标定:确定左右相机之间的相对位置和姿态,以及基线距离等参数
优化算法:采用优化算法对标定结果进行优化,提高标定精度
优化算法:采用先进的优化算法,提高标定精度和速度 参数调整:根据实际情况调整相机参数和标定板规格,提高标定效果 多视角标定:采用多视角标定方法,提高标定结果的稳定性和可靠性 实践应用:将双目视觉系统应用于实际生产中,不断优化和改进系统性能
常见的相机标定方法包括 张氏标定法、两步法等, 这些方法都需要使用已知 尺寸和位置的标定板作为 参照物。
相机标定的精度直接影 响到双目视觉系统的测 量精度,因此需要进行 高精度的相机标定。
在进行相机标定时,需 要注意消除相机的畸变, 以提高标定精度和双目 视觉系统的测量精度。
相机内参标定:确定相机内部参数,如焦距、光心等 相机外参标定:确定相机相对于标定物的位置和姿态
触、低成本
挑战:光照条 件、目标遮挡、 复杂背景、实
时性
硬件部分:包 括双目视觉相 机、机械零件、
标定板等
软件部分:包 括图像采集、 预处理、特征 提取、位姿计
算等模块
算法部分:采 用基于特征匹 配的位姿计算 方法,实现机 械零件的位姿
检测
应用部分:将 位姿检测结果 应用于机械零 件的自动化装 配和质量控制
嵌入式机器视觉检测软件的构件化设计

R aI ae 0 t ( 、 e r Cm oet t fc ( 等 函 edm gc n t ) G t e o pnnI e ae ) e Pv nr
数; 配置接 口是设 置被检测特征 目标相关的属性参数 ,
如沿线定位检测中的边界类 型和边界宽 度 ; 资源请求 接 口主要包括对 构件关联 、 内存分 配 、 M D A通 道使用 等软硬件资源的调用 , 通过 T 的 X A S标准 中 IL I D I AG 接 口实现 ; 出接 口主要输 出图像算 法的运算结 果。 输
智能相机 由采集模块 、 处理模块 、 外部通 信模块及 其他外 围器件 等组 成 。图像 信号 由 C D 图像 采集 C 模块采 入 , 由并行 数据线 传送至 F G 经 P A中 ,P A将 FG 图像数据转换后存 储到 S R M 中 , S ( M 4 D A D P D 6 2处理 器) 调用 Fah中的图像处理程序对 S R M 中的图像 l s DA 数据进行实时处理 , 并根 据处理 结果通 过数字 IO 向 /
嵌 入 式 机 器 视 觉 检 测 软 件 的构 件 化 设计
陈
棒。 等
嵌 入式 机 器 视 觉检 测软 件 的构 件 化 设 计
De i ft e E b d e a h n s o n p c in S fw a e sgn o h m e d d M c i e Vii n I s e to o t r
算 法 构 件 各 个 接 口具 体 描 述 如表 1 示 。其 中输 所 入接 口主要 完 成 对 图像 数 据 的 读 取 和 其 他 构 件 的关
联 , 括 G t g C lr u () e dm gHed() 包 eI e ooN m ma 、R al a e a 、
基于机器视觉的矿井提升系统高速钢丝绳智能在线检测装置

基于机器视觉的矿井提升系统高速钢丝绳智能在线检测装置摘要:基于机器视觉的矿井提升系统高速钢丝绳智能在线检测装置是运用AI高速识别技术,采用先进的数字化视频技术、AI图像智能识别技术,通过智能识别摄像仪和AI算法,在不减速、不停机的情况下实时监视和识别钢丝绳的状态,对细小的断丝、捻距、磨损、锈蚀等异常状态进行照片抓拍、自动录像,精准定位钢丝绳位置,并且能够第一时间识别出来,并发出报警,自动生成检测报告,给煤矿精准检修、评估钢丝绳使用寿命提供了可靠依据,大大提高煤矿安全监管,提高安全生产、降低安全事故的发生,为提升系统保驾护航,系统实现了提升系统的信息化、数字化和智能化水平。
关键词:人工智能;智能分析;线扫相机;钢丝绳在线检测;智能检修。
0、引言运输是矿井的动脉,提升则是咽喉,这充分体现了矿井提升运输系统在矿井工作过程中的重要性。
矿井提升运输是采煤过程中的重要环节,井下个工作面采掘下来的煤或矸石、人员的升井,材料、设备的运送,均需要通过提升运输系统来完成。
所以提升系统安全、可靠、稳定运行是保障煤矿的日常生产,矿工人身安全的前提条件。
矿方同样重视,每天安排检修设备检查,钢丝绳人工查看等,但每天的检修耗时、耗力,而且影响生产和人员升井,人员在井筒内检修,安全风险也比较大,因此基于机器视觉的矿井提升系统高速钢丝绳智能在线检测装置应运而生,该系统能有效解决钢丝绳安全隐患,并且在生产过程中就完成了检修工作,真正实现了钢丝绳在线检测和智能检修。
1、系统研究背景及意义近年来,主、副井提升系统用于煤炭提升使用,在矿井生产运行中起到非常重要的作用。
煤矿的主、副井提升运输系统具备全自动运行功能,但仍需安排岗位工值岗,观察提升系统的运行,防止出现异常情况。
提升系统的钢丝绳首绳是矿山生产流程中重要的组成部分,也是提升机的关键承载构件,其运行环境复杂,日常维护困难,一旦发生故障会引起停产或人员伤亡的严重事故。
长期以来,提升系统首绳系统的巡检工作主要依靠人工进行定时排查,日常检测主要依赖的是“目视、手摸、卡尺量”,人工目测方法可靠性差效率低下,花费大量人力,无法做到高效检测。
机器视觉论文
基于机器视觉的玻璃瓶表面缺陷检测系统在生活中,有各种各样的玻璃瓶不断地被回收,以便循环再用。
如:啤酒瓶、可口可乐瓶、牛奶瓶等等。
大量的玻璃瓶被回收,使其回收检测从人工智能逐渐过渡到自动化检测,而机器视觉极适用于大批量生产过程中的测量、检查、识别、线阵CCD在连续、扫描在线测量中的应用非常有优势。
用机器视觉检测方法可以大大提高生产的自动化程度,而且机械视觉易于实现信息集成,可极大地提高产品质量,提高生产效率。
所以,在玻璃瓶收回检测中,机器视觉逐渐成为检测的主流方法。
一、玻璃瓶检测的特点玻璃瓶的检测具有以下的特点:(一)材料是玻璃。
(二)玻璃瓶检测强调实时、在线,确保对过程实现全面的控制,提高生产效率和生产合格率。
(三)玻璃瓶形状复杂。
用传统人工检测难以实现快速大批量的精确检测。
针对玻璃瓶检测的特点各要求,我们可以主要针对四个方面来进行检测,即瓶口检测:螺纹检测;瓶壁检测:瓶壁内、外表面污物检测、磨损度检测;瓶底检测:瓶底污物,裂纹;瓶内残液检测:残留碱液,残留油,残留水。
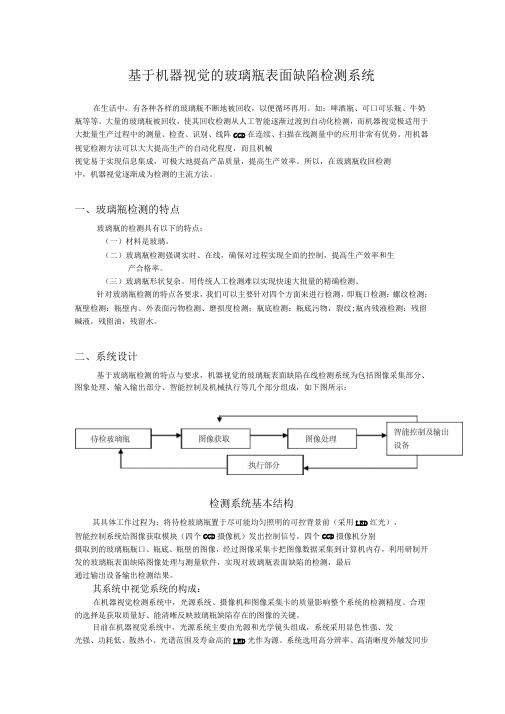
二、系统设计基于玻璃瓶检测的特点与要求,机器视觉的玻璃瓶表面缺陷在线检测系统为包括图像采集部分、图象处理、输入输出部分、智能控制及机械执行等几个部分组成,如下图所示:检测系统基本结构其具体工作过程为:将待检玻璃瓶置于尽可能均匀照明的可控背景前(采用LED红光),智能控制系统给图像获取模块(四个CCD摄像机)发出控制信号,四个CCD摄像机分别摄取到的玻璃瓶瓶口、瓶底、瓶壁的图像,经过图像采集卡把图像数据采集到计算机内存,利用研制开发的玻璃瓶表面缺陷图像处理与测量软件,实现对玻璃瓶表面缺陷的检测,最后通过输出设备输出检测结果。
其系统中视觉系统的构成:在机器视觉检测系统中,光源系统、摄像机和图像采集卡的质量影响整个系统的检测精度。
合理的选择是获取质量好、能清晰反映玻璃瓶缺陷存在的图像的关键。
目前在机器视觉系统中,光源系统主要由光源和光学镜头组成,系统采用显色性强、发光强、功耗低、散热小、光谱范围及寿命高的LED光作为源。
01-02第一章工业机器人与智能视觉简介

1.3智能视觉技术
20世纪80年代以来,智能视觉技术一直是非常活跃 的研究领域,并经历了从实验室走向实际应用的发展阶 段,从简单的二值图像处理到高分辨率多灰度的图像处 理以至于彩色图像处理,从一般的二维信息处理到三维 视觉模型和算法的研究都取得了很大进展。作为一种先 进的检测技术,智能视觉技术已经在工业产品检测、自 动化装配、机器人视觉导航、虚拟现实以及无人驾驶等 许多领域的智能测控系统中得到广泛应用。
1.3智能视觉技术
1)、智能视觉技术发展现状 人类感知外部世界主要是通过视觉、触觉、听觉和 嗅觉等感觉器官,其中约80%的信息是通过视觉器官获取 的。视觉感知环境信息的效率很高,它不仅指对光信号 的感受,还包括对视觉信息的获取、传输、处理、存储 与理解的全过程。对人类而言,视觉信息传入大脑之后, 由大脑根据已有的知识进行信息处理,进而判断和识别。
1.2、工业机器人全自动化的工厂
当车体组装好以后,位于车间上方的“运输机器人” 能将整个车身吊起,运往位于另一栋建筑的喷漆区。在 那里,“喷漆手”机器人拥有可弯曲机械臂,不仅能全 方位、不留死角地为车身上漆,还能使用把手来开关车 门与车厢盖。
1.2、工业机器人全自动化的工厂
送到组装中心后,“多工机器人”除了能连续安装 车门、车顶外,还能将一个完整的座椅直接放人汽车内 部,主管生产的帕辛都称其“令人惊叹”。有意思的是, 组装中心的“安装机器人”还是个“拍照达人”,因为 在为Mode1S安装全景天窗时,它总会先在正上方拍张车 顶的照片,通过照片测量出天窗的精确方位,再把玻璃 黏合上去(见图1-3、图1-4)。
1.3智能视觉技术
目前,发展最快、使用最多的智能视觉技术主要集中 在欧美、日本等发达国家和地区。发达国家在针对工业现 场的实际情况开发机器视觉硬件产品的同时,对软件产品 的研究也投人了大量的人力和财力。机器视觉的应用普及 主要集中在半导体和电子行业,其中40%~50%集中在半导体 制造行业,如PCB印制电路板组装工艺与设各、SMT表面贴 装工艺与设各、电子生产加工设备等。此外,智能视觉技 术在其他领域的产品质量检测方面也得到了广泛应用,如 在线产品尺寸测量、产品表面质量判定等。
基于机器视觉的智能控制定位检测系统

1 1 机 器 视 觉 的 构 成 .
一
非接 触检 测. 时 , 同 定位 更 加准 确 , 提高 了使 用周期 和生 产效 率 , 足 了 现代 制 造 业 高 效 率 生 产 的要 满 求. 器 视觉 技术 是一 门新 兴 的科 学 , 势 明显 、 机 优 发
展潜 力 大 、 面 开放 , 界 编程 人 员 可 以根 据 需 要 改 进
第 2 5卷第 4期 21 0 1年 1 2月
上
海
工
程
技
术
大
学
学
报
Vo _ 5 No 4 l2 .
De .2 1 c 01
J OuRNAL OF S HANGHAIUNI RS T OF E VE I Y NGI E N S I NC NE RI G C E E
摘 要 : 绍 了一 种 基 于 机 器 视 觉 的 自动 传 插 件 的 智 能 控 制 定 位 检 测 系 统 , 系 统 利 用 机 器 视 觉 介 该 8 3 7 m , 机 械 定 位 相 比 , 高 了 系 统 的 稳 使 3 . 4 5n 与 提
S s e o n e lg n nt o nd Po ii ni t c i n y t m f I t li e t Co r la s to ng De e to