移动群体感知
移动群智感知系统技术研究

移动群智感知系统技术研究随着移动设备的普及和智能化,手机、平板等移动设备已经成为人们日常生活中不可或缺的一部分。
除了满足人们的娱乐需求,移动设备还能为人们提供更多的服务和便利。
其中移动群智感知系统就是一种新型的服务模式,它利用普遍存在的移动设备,通过集成传感器等功能,收集地理位置、环境信息等数据,为人们提供更加智能、优质的服务。
一、移动群智感知系统是什么?移动群智感知系统是一种基于人们自愿参与、通过移动设备采集信息,从而对地理位置、环境信息等数据进行感知与分析的系统。
在这个系统中,人们不需要拥有专业的数据采集器或者传感器,只需要在平常使用移动设备时,通过应用程序和互联网平台进行信息传递,就可以将所采集到的信息汇总为一份大数据。
这份数据可以通过后台数据分析和运算,形成有用的信息和数据分析结果,从而实现对城市、物流、环保等领域的智能服务和优化。
二、移动群智感知系统的特点移动群智感知系统具有以下几个特点:1、低成本:与传统的专业数据传感器相比,移动群智感知系统不需要大量的成本投入,利用人们日常生活中已经普遍存在的移动设备,就可以完成对信息的收集和传输,从而大大降低了采集和数据传输的成本。
2、高可扩展性:这种系统可以随着移动设备的发展和普及,不断融合更多的信息和数据,从而不断完善其信息库和数据分析能力,以更好地为人们提供服务和优化。
3、快速响应:移动群智感知系统将城市、物流、环保等领域的信息和数据实时收集传输,然后经过后台分析和挖掘,实现快速反馈和响应,从而为人们提供更智能、高效的服务。
三、移动群智感知系统的应用1、环保领域随着城市化进程的加速和工业化的发展,环境污染、垃圾分类、水源保护等问题成为人们越来越关注的话题。
通过移动群智感知系统的应用,可以通过普通居民的移动设备,收集城市环境、空气质量等信息,再通过数据处理和分析,指导环境管理和政策制定等工作,从而达到环保的目的。
2、交通领域随着城市老化、公共交通基础设施建设的加强和个人出行方式的多样化,交通问题越来越受到人们的重视。
移动群智感知应用

移动群智感知应用作者:陈荟慧郭斌於志文来源:《中兴通讯技术》2014年第01期Mobile Crowd-Sensing Application中图分类号:TP391 文献标志码:A 文章编号:1009-6868 (2014) 01-0035-003摘要:认为无线通信和智能移动设备的发展为群智感知在移动环境下的应用奠定了基础,而廉价多样的传感器使移动群智感知应用与人类社会的联系更加紧密。
移动群智感知用户采集数据时的协作方式分为参与式感知、机会感知两种,各有优缺点和局限性。
移动群智感知需要考虑用户成本、网络压力、云计算服务器架设、用户隐私保护等方面的问题,要面对情境隐私、匿名任务、匿名数据汇报、可靠数据读取、数据真实性等安全方面的挑战。
关键词:移动群智感知;参与式感知;机会感知Abstract: The development of wireless communication and smart mobile devices has been the impetus for mobile crowd-sensing applications. Low-cost sensors in smart devices means that mobile crowd-sensing applications are more tightly associated with human communities. In a mobile crowd-sensing application, measures for sensing cooperation between individuals may be categorized as participant-sensing or opportunity-sensing. Both of these measures have advantages and disadvantages. Mobile crowd-sensing has to consider problems such as cost to the user, pressure on the mobile communication network, constructing a cloud server, and user privacy. Security is a challenge in privacy protection, anonymous tasking, anonymous reporting, collection of dependent data,and data reliability.Key words: mobile crowd-sensing application; participant sensing; opportunity sensing1 群智感知的架构群智感知通过感知个体的信息而挖掘群体信息并反作用于个体或群体[1]。
移动群智感知数据的处理与分析技术研究

移动群智感知数据的处理与分析技术研究随着智能手机的普及和移动互联网的发展,移动群智感知成为一种新型的数据采集方法。
移动群智感知利用大量的智能手机用户,通过手机的传感器收集各种环境数据并上传至云端进行处理和分析。
这种方法不仅能够有效地采集大规模的数据,还可以快速响应用户需求,在特定情境下提供实时的数据支持。
然而,移动群智感知数据的处理与分析也带来了一系列挑战。
本文将重点探讨如何有效地进行移动群智感知数据的处理与分析,以提高数据的质量和挖掘数据的价值。
首先,移动群智感知数据的处理包括数据清洗和预处理。
由于数据是由智能手机用户主动上传的,不同用户之间的数据质量可能存在差异。
因此,需要对数据进行清洗,删除错误的数据、噪声数据和冗余数据。
同时,还需要进行数据预处理,包括数据格式的转换、数据的标准化和数据的归一化。
通过数据清洗和预处理,可以提高数据的准确性和一致性,为后续的分析工作奠定基础。
接下来,移动群智感知数据的分析涉及到数据挖掘和机器学习等技术。
数据挖掘是从大规模数据中发现潜在模式和关联规则的过程。
在移动群智感知的场景下,数据挖掘可以帮助我们发现用户行为模式、社会网络关系和地理信息分布等。
通过对这些模式和规则的挖掘,可以为用户提供个性化的服务和决策支持。
机器学习是一种通过训练算法来自动分析和解释数据的方法。
在移动群智感知的数据分析中,机器学习可以应用于识别和分类、预测和推荐等任务。
例如,可以利用机器学习算法对用户上传的图片数据进行图像识别,从而实现自动标签和分类。
另外,还可以使用机器学习算法对用户的行为数据进行预测,从而提供更好的个性化推荐和服务。
除了数据挖掘和机器学习,移动群智感知数据的处理与分析还需要考虑数据隐私和安全。
由于用户上传的数据可能包含个人隐私信息,如位置信息、通话记录等,因此需要采取相应的隐私保护措施。
例如,可以对用户数据进行加密和脱敏处理,以保护用户隐私。
同时,还需要建立有效的权限管理机制,限制数据的访问和使用范围。
移动群智感知网络技术的研究与应用

移动群智感知网络技术的研究与应用随着信息技术和互联网的快速发展,人们也对于信息获取和处理的需求越来越多。
传统的传感器网络虽然可以满足一部分需求,但是其种类和数量有限,覆盖范围有限,而且采集到的数据也不一定准确。
因此,移动群智感知网络技术应运而生。
移动群智感知网络(Mobile Crowdsensing Network)简称MCSN,是一种基于移动终端的感知网络,能够动态地组织社区中的移动设备完成感知任务。
MCSN的核心思想是将移动设备作为感知节点,利用其自身的计算、存储和通信资源,组织形成一种分布式感知网络,将感知数据上传到云端进行处理和分析。
MCSN的优势在于可以快速地完成大规模感知任务,提高感知数据的准确度和实时性,同时降低了感知的成本和覆盖范围,增加了感知数据的多样性和丰富度。
MCSN在环境感知、交通监测、健康监护、社交娱乐等方面都有着广泛的应用前景。
MCSN的具体实现需要解决一系列技术难题,包括感知任务的发布、节点的组织与调度、感知数据的处理与分析等环节。
以下是MCSN中一些比较重要的技术点:1、感知任务发布与管理。
感知任务的发布需要考虑到任务的类型、时间、地点、感知内容等因素。
同时,也需要考虑到节点的数量和分布情况,进行任务调度和节点分组。
需要使用一些高效的算法来确保任务的分配和完成。
2、节点的组织与调度。
节点的选择和组织需要考虑到节点的可靠性、能耗和通信质量等因素。
同时,节点的调度和位置估计也需要采用一些优化算法来进行优化。
3、感知数据的处理与分析。
感知数据的处理和分析是MCSN中最关键的环节之一。
需要根据不同的应用场景和任务需求,进行数据预处理、特征提取、数据分类等工作,同时也需要进行数据的可视化和结果评估。
MCSN的应用场景非常广泛,下面列举几个比较有代表性的应用:1、智慧城市环境感知。
通过MCSN可以监测城市的空气质量、噪声、温度、湿度等环境参数,同时可以监控交通流量、车辆拥堵情况等,为城市管理和规划提供数据支持。
参考文献
References[1]A.Bazzi, B.Masini, A.Zanella, G.Pasolini, Virtual road side units for georouting in VANETs, in: Proceedings of the International Conferenceon Connected Vehicles & Expo (ICCVE,2014),2014.[2]NHSTA web page. , (accessedJune2015).[3]R.Uzcategui, G.Acosta-Marum, WAVE: atutorial, IEEE Commun. Mag. 47(5) (2009)126–133, doi: 10.1109/MCOM.2009.4939288.[4]A.Bazzi, B.Masini, G.Pasolini, V2V and V2R for cellular resources saving in vehicular applications, in: Proceedings of the IEEE Wireless Communications and Networking Conference (WCNC), 2012, pp. 3199–3203,doi:10.1109/WCNC.2012.6214358.[5]R.Ganti, F.Ye, H.Lei, Mobile crowdsensing: current state and future challenges, IEEE Commun.Mag.49(11)(2011)32–39,doi: 10.1109/MCOM.2011.6069707.[6]H.Ma, D.Zhao, P.Yuan, Opportunities in mobile crowd sensing, IEEE Commun.Mag.52(8) (2014)29–35,doi:10.1109/MCOM.2014.6871666.[7]X.Yu, H.Zhao, L.Zhang, S.Wu, B.Krishnamachari, V.Li, Cooperative sensing and compression in vehicular sensor networks for urban monitoring, in: Proceedings of the IEEE International Conference on Communications (ICC),2010,pp.1–5,doi:10.1109/ICC.2010.5502562.[8]A.R.Al-Ali, I.Zualkernan, F.Aloul, Amobile GPRS-sensors array for air pollution monitoring, IEEE Sens. J. 10(10)(2010)1666–1671,doi:10.1109/JSEN.2010.2045890.[9]A.Bazzi, B.Masini, O.Andrisano, On the frequent acquisition of small data through RACH in UMTS for ITS applications, IEEE Trans. Veh.Technol.60(7)(2011)2914–2926,doi:10.1109/TVT.2011.2160211.[10]C.Lochert, B.Scheuermann, C.Wewetzer, A.Luebke, M.Mauve, Data aggregation and roadside unit placement for a VANET traffic information system, in: Proceedings of the Fifth ACM International Workshopon Vehicular Inter-Networking, in: VANET’08, ACM, NewYork, NY, USA, 2008, pp.58–65, doi:10.1145/1410043.1410054.[11]B.Aslam, F.Amjad, C.Zou, Optimal roadside units placement in urban areas for vehicular networks, in: Proceedings of the IEEE Symposium on Computers and Communications (ISCC), 2012, pp. 000423–000429,doi:10.1109/ISCC.2012.6249333.[12]N.Benamar, K.D.Singh, M.Benamar, D.E.Ouadghiri, J.-M.Bonnin, Routing protocols in vehicular delay tolerant networks: a comprehensive survey, Comput. Commun. 48(0) (2014)141–158, doi:10.1016/com.2014.03.024.[13]Z.Taysi, A.Yavuz, Routing protocols for geonet: asurvey, IEEE Trans. Intell. Transp. Syst. 13(2) (2012)939–954,doi:10.1109/TITS.2012.2183637.[14]M.Mauve, J.Widmer, H.Hartenstein, A survey on position-basedrouting in mobile ad hoc networks, Network, IEEE15 (6) (2001)30–39,doi:10.1109/65.967595.[15]B.Karp, H.T.Kung, GPSR: greedy perimeter stateless routing for wireless networks, in: Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (MobiCom’00),ACM,NewYork,NY,USA,2000,pp.243–254,doi:10.1145/345910.345953.[16]C.Lochert, M.Mauve, H.Füssler, H.Hartenstein, Geographic routing in city scenarios, SIGMOBILE mun. Rev. 9(1)(2005)69–72,doi:10.1145/1055959.1055970.[17]U.Lee, E.Magistretti, B.Zhou, M.Gerla, P.Bellavista, A.Corradi, Efficient data harvesting in mobile sensor platforms, in: Proceedings of the Fourth Annual IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom), 2006, pp.5–356,doi:10.1109/PERCOMW.2006.47.[18]ert, M.Cetin, Queue length estimation from probe vehicle location and the impacts of sample size, Eur.J.Oper.Res.197(1)(2009)196–202,doi:10.1016/j.ejor.2008.06.024.[19]R.Stanica, M.Fiore, F.Malandrino, Offloading floating car data,in :Proceedings of the 14th IEEE International Symposium and Workshops on a World of Wireless, Mobile and Multimedia Networks(WoWMoM),2013,pp.1–9,doi:10.1109/WoWMoM.2013.6583391.[20]U.Lee, M.Gerla, A survey of urban vehicular sensing platforms, w.54(4)(2010)527–544,doi:10.1016/net.2009.07.011.[21]B.Masini, L.Zuliani, O.Andrisano, On the effectiveness of a GPRS based intelligent transportation system in a realistic scenario, in: Proceedings of the IEEE 63rd Vehicular Technology Conference(VTC2006-Spring),6,2006,pp.29973001, doi:10.1109/VETECS.2006.1683418.[22]I.Leontiadis, G.Marfia, D.Mack, G.Pau, C.Mascolo, M.Gerla, On the effectiveness of an opportunistic traffic management system for vehicular networks, IEEE Trans.Intell.Transp.Syst.12(4)(2011)1537–1548,doi:10.1109/TITS.2011.2161469.[23]C.deFabritiis, R.Ragona, G.Valenti, Traffic estimation and prediction based on real time floating car data, in: Proceedings of the 11th International IEEE Conference on Intelligent Transportation Systems(ITSC),2008,pp.197–203,doi:10.1109/ITSC.2008.4732534.[24]A.Skordylis, N.Trigoni, Efficient data propagation in traffic-monitoring vehicular networks, IEEE Trans.Intell.Transp.Syst.12(3)(2011)680694,doi:10.1109/TITS.2011.2159857.[25]A.Bazzi, B.M.Masini, A.Zanella, G.Pasolini, {IEEE} 802.11p for cellular offloading in vehicular sensor networks, Comput. Commun.60(2015)97–108,doi:10.1016/com.2015.01.012. [26]F.Li, Y.Wang, Routing in vehicular ad hoc networks: asurvey,IEEEVeh. Technol. Mag. 2(2)(2007)1222,doi:10.1109/MVT.2007.912927.[27]V.Naumov, T.Gross, Connectivity-aware routing (CAR) in vehicular ad-hoc networks, in: Proceedings of the 26th IEEE International Conference on Computer Communications (INFOCOM), 2007,pp.1919–1927,doi:10.1109/INFCOM.2007.223.[28]J.Haerri, F.Filali, C.Bonnet, Performance comparison of AODV and OLSR in VANETs urban environments under realistic mobility patterns, in:Proceedings of the 5th IFIP Mediterranean Ad-Hoc Networking Workshop (Med-Hoc-Net-2006), Lipari,Italy,2006.[29]A.Vahdat, D.Becker, etal., Epidemic routing for partially connected ad hoc networks, Technical Report CS-200006, DukeUniversity, Durham, NorthCarolina,2000.[30]T.Spyropoulos, K.Psounis, C.S.Raghavendra, Sprayandwait: anefficient routing scheme for intermittently connected mobile networks,in: Proceedings of the 2005 ACM SIGCOMM Workshop on Delaytolerant Networking(WDTN’05),ACM,NewYork,NY,USA,2005,pp.252259,doi:10.1145/1080139.1080143. [31]Y.Xiang, Z.Liu, R.Liu, W.Sun, W.Wang, GeoSVR: a map-based stateless VANET routing, Ad HocNetw.11(7)(2013)2125–2135, doi:10.1016/j.adhoc.2012.02.015.[32]K.Mershad, H.Artail, M.Gerla, ROAMER: roadside units as message routers in VANETs, Ad Hoc Netw.10(3)(2012)479–496,doi:10.1016/j.adhoc.2011.09.001.[33]S.Ahmed, S.S.Kanere, SKVR: Scalable knowledge-based routing architecture for public transport networks, in: Proceedings of the 3rd International Workshop on Vehicular Ad Hoc Networks(VANET’06),ACM,NewYork,NY,USA,2006,pp.92–93,doi:10.1145/1161064.1161082.[34]Q.Yuan, I.Cardei, J.Wu, An efficient prediction-based routing in disruption-tolerant networks ,IEEE Trans. Parallel Distrib.Syst.23(1)(2012)19–31,doi:10.1109/TPDS.2011.140.[35]C.Lochert, H.Hartenstein, J.Tian, H.Fussler, D.Hermann, M.Mauve, A routing strategy for vehicular ad hoc networks in city environments, in: Intelligent Vehicles Symposium,2003.Proceedings.IEEE,2003,pp.156–161,doi:10.1109/IVS.2003.1212901.[36]T.Camp, J.Boleng, L.Wilcox, Location information services in mobile ad hoc networks, in: Proceedings of IEEE International Conference on Communications (ICC),5,2002,pp.3318–3324, doi:10.1109/ICC.2002.997446.[37]J.Bernsen, D.Manivannan, Unicast routing protocols for vehicular ad hoc networks: acritical comparison and classification, Pervasive Mob.Comput.5(1)(2009)1–18,doi:10.1016/j.pmcj.2008.09.001.[38]K.Lee, J.Haerri, U.Lee, M.Gerla, Enhanced perimeter routing for geographic forwarding protocols in urban vehicular scenarios, in: Proceedings of IEEE Globecom Workshops,2007,pp.1–10,doi:10.1109/GLOCOMW.2007.4437832.[39]A.Bazzi, G.Pasolini, C.Gambetti, SHINE: simulation platform for heterogeneous interworking networks, in: Proceedings of IEEE International Conference on Communications(ICC’06),12,2006,pp.5534–5539,doi:10.1109/ICC.2006.255543.[40]A.Toppan, A.Bazzi, P.Toppan, B.Masini, O.Andrisano, Architecture of a simulation platform for the smart navigation service investigation, in:Proceedings of the 6th International IEEE Conference on Wireless and Mobile Computing, Networking and Communications(WiMob),2010,pp.548-554,doi:10.1109/WIMOB.2010.5645014.[41]SHINE web page. r.it/people/bazzi/SHINE.html,(accessedJune2015).[42]C.Campolo, A.Molinaro, Multichannel communications in vehicular ad hoc networks: a survey,IEEE Commun.Mag.51(5)(2013)158–169,doi:10.1109/MCOM.2013.6515061.[43]S.Uppoor, O.Trullols-Cruces, M.Fiore, J.Barcelo-Ordinas, Generation and analysis of a large-scale urban vehicular mobility dataset, IEEE put.99(PP)(2013),doi:10.1109/TMC.2013.27.[44]A.Benslimane, S.Barghi, C.Assi, An efficient routing protocol for connecting vehicular networks to the internet, Pervasive Mob. Comput.7(1)(2011)98–113,doi:10.1016/j.pmcj.2010.09.002.[45]J.-J.Chang, Y.-H.Li, W.Liao, I.-C.Chang, Intersection-based routing for urban vehicular communications with traffic-light considerations, IEEEmun19(1)(2012)82–88,doi:10.1109/MWC.2012.6155880.[46]F.Martinez, C.-K.Toh, J.-C.Cano, C.Calafate, P.Manzoni, Realistic radio propagation models (RPMs) for VANET simulations, in: Proceedings of IEEE Wireless Communication sand Networking Conference (WCNC),2009,pp.1–6,doi:10.1109/WCNC.2009.4917932.[47]L.Cheng, B.Henty, D.Stancil, F.Bai, P.Mudalige, Mobile vehicle-to-vehicle narrow-band channel measurement and characterization of the 5.9 GHz dedicated short range communication (DSRC)frequencyband, IEEE J. Sel. AreasCommun.25(8)(2007)1501–1516,doi:10.1109/JSAC.2007.071002.引用[1] A.Bazzi, B.Masini, A.Zanella, G.Pasolini, 由、虚拟路边单元在VANETs georouting:《国际会议上连接车辆&世博会(ICCVE,2014),2014。
群智感知 研究综述

群智感知研究综述作者:郑晓茹来源:《卫星电视与宽带多媒体》2019年第18期【摘要】物联网在物理世界与信息世界的联网和扩展需求之下进入大众视野,感知网络作为物联网的核心技术,但是成本非常高。
互联网+群体思维的群智感知网络的出现,可以解决高成本的问题,但是群智感知网络的发展面临着一些挑战,参与用户不愿意去共享个人的隐私数据。
本文利用实证研究的方法,构建群智感知平台上用户隐私数据共享意愿的概念模型,并通过问卷调研得出研究结论,为群智感知平台提高用户隐私数据共享意愿提供一定的理论指导。
【关键词】群智感知平台;成本;收益群智感知网络指普通用户的移动设备作为参与感知任务的基本单元,通过移动互联网进行协作,实现感知任务参与和数据的收集,完成大规模的社会感知任务。
1. 群智感知网络发展的有利条件群智感知网络的飞速发展主要基于以下几个因素:移动智能手机的广泛普及。
据调查统计,截止2018年底,全球智能手机用户数量已突破24.1亿,预计到 2019年将增长8%,WirelessExpertise在《未来移动应用展望报告》中提到,2020年智能手机在移动市场中占比将达到30%左右;传感器技术的飞速发展,智能手机的传感器包括:红外线传感器、WiFi信号检测器,诸多的传感器为用户参与群智感知任务提供了保障;随着智能手机开放性的不断提高,应用商店的逐步兴起,智能手机的计算、存储、通信和感知能力不断增强;高计算和高存储能力的计算中心的出现。
同时,云计算和云存储技术的高速发展,为海量数据的存储及数据的计算提供可能。
如微软Azure、Google Drive、IBM Bluemix Paas、阿里云存储、亚马逊AWS、和163云存储等,云技术的出现为群智感知平台的进一步发展提供了技术支撑。
2.国内外群智感知网络相关研究加州伯克利大学(UCB)的Common Sense项目介绍了一种移动设备参与感知并收集空气质量数据的方法,希望能够帮助日常收集公民与政治相关数据并参与做决定的过程。
移动群智感知中的数据质量评估方法综述
移动群智感知中的数据质量评估方法综述随着移动设备的普及和通信技术的发展,移动群智感知(Mobile Crowd Sensing, MCS)作为一种新兴的数据收集方法,已经成为解决实时环境感知问题的有效手段。
在MCS中,大量的移动参与者通过他们的智能手机或其他移动设备,收集、传输和分享各种环境数据,包括噪声、空气质量、交通状况等。
然而,由于移动设备的异构性、参与者的主观性和环境的复杂性,所收集到的数据可能会存在质量问题,这就需要对数据进行质量评估,以保证感知结果可靠性和数据可信度。
本文将综述移动群智感知中的数据质量评估方法,旨在为研究者和从业人员提供一份参考,以提高MCS系统的数据质量。
首先,最常用的数据质量评估方法之一是基于数据准确性的评估。
通过比对不同参与者之间的感知数据,可以验证其准确性。
例如,一些方法使用全局定位系统(Global Positioning System, GPS)来验证参与者的位置数据,或者使用传感器之间的协同测量来验证环境参数的一致性。
此外,还可以利用外部传感器或设备来验证MCS所收集数据的准确性。
第二,数据完整性也是评估数据质量的重要指标。
在MCS中,参与者可能会因为各种原因中断数据收集,或者收集到不完整的数据。
因此,需要一些方法来检测数据的完整性并填补缺失数据。
一种常见的方法是在感知过程中引入错误检测和纠正机制,当检测到错误时,会触发相应的措施进行修复,从而保证数据的完整性。
数据一致性问题同样需要关注。
在MCS中,参与者分布广泛,可能处于不同的环境条件下,因此他们所感知到的数据可能存在差异。
为了保证数据一致性,可以利用统计学方法和机器学习算法,对数据进行分析和建模,以减小感知数据之间的差异。
此外,数据时效性也是一个需要解决的问题。
由于MCS涉及到大量的感知数据,数据的时效性对于实时环境感知至关重要。
因此,需要一些方法来评估和提高数据的时效性。
一种常见的方法是通过分析数据的时序特征,确定数据的更新频率和延迟。
智能交通领域的移动感知技术研究和应用
智能交通领域的移动感知技术研究和应用一、引言随着城市化和智能化的发展,交通领域的技术也逐渐得到了升级和创新,使人们能够更加方便、高效、安全地出行。
作为交通领域的重要组成部分,智能交通系统已经日趋完善,并且移动感知技术在此领域的发展中发挥着越来越重要的作用。
本文将对智能交通领域的移动感知技术进行深入研究和探讨,并重点分析其在实际应用中的价值和未来发展潜力。
二、移动感知技术概述目前,随着计算机、电子通信、传感器技术等各类技术的不断发展,移动感知技术已经成为智能交通领域的重要组成部分之一。
所谓移动感知技术,是指通过采集手机、无线端节点、智能车辆和其他传感器等传统的移动设备所搭载的传感器信息,从而实现对行人、车辆、设备、环境等的感知和识别的过程,借助传感器的信息获取模块和数据分析模块来实现。
在智能交通之中,移动感知技术的应用十分广泛,包括自动驾驶车辆、路况监测、追踪和监控车辆、规划智能交通路线、提供智能交通服务等等方面。
可以说,移动感知技术的发展,让智能交通领域的各个环节都更加智能和高效。
三、移动感知技术在智能交通方面应用1.自动驾驶汽车自动驾驶汽车成为了当前移动感知技术的一个热点领域。
其主要应用的思路是通过传感器来实时感知汽车的行驶状态,进而识别交通信号灯、路标、其他汽车和行人等物体,并把这些信息传递给智能驾驶功能系统,从而实现汽车自动驾驶。
2.智能交通路线规划移动感知技术也可以帮助智能交通车辆规划合理的路线。
通过分析道路情况、交通拥堵和交通信号灯等特征信息,可以为智能交通车辆提供精准的路线规划,优化交通出行效率。
3.交通追踪与监控利用移动感知技术可以快速、精准地实现对交通事故场景的追踪和监控。
传感器、摄像头等设备可以实时感知事故区域,通过数据分析和云计算技术,可以将相关数据传输给救援人员,迅速进行救援工作。
四、移动感知技术的应用前景移动感知技术在智能交通领域的应用前景非常广阔。
未来,随着智能交通的发展,移动感知技术将得到进一步的提升和优化。
基于多智能体系统的移动群智感知协同优化策略
基于多智能体系统的移动群智感知协同优化策略移动群智感知是一种利用移动设备(如智能手机、平板电脑)和感知技术,通过众包的方式进行数据收集和处理的方法。
在移动群智感知中,多智能体系统扮演着关键的角色,通过相互协作和信息交流,提高了移动群智感知的效率和准确性。
为了进一步优化移动群智感知的性能,基于多智能体系统的移动群智感知协同优化策略应运而生。
基于多智能体系统的移动群智感知协同优化策略的核心目标是提高系统的能源效率、数据质量和任务完成率。
为了实现这些目标,可以采用以下几种策略。
首先,对于能源效率的优化,可以通过多智能体系统中的协作机制降低单个智能体的能量消耗。
在移动群智感知中,感知任务的数量庞大,而设备的能量有限。
因此,合理地分配任务可以均衡智能体之间的能量消耗,延长移动设备的使用寿命。
例如,可以采用任务分片机制,将感知任务拆分成多个子任务,并由不同的智能体完成。
通过合理分配子任务,可以减少感知任务对单个智能体的能耗。
其次,为了提高数据质量,可以采用多智能体系统中的协作和信息交流机制。
在移动群智感知中,利用不同智能体的多样性和互补性来提高数据的精确性和准确性。
智能体之间可以共享各自收集到的数据,并通过信息交流来校正和补充数据。
此外,可以使用一致性算法和数据融合技术,将多个智能体的数据进行整合和分析,提供更为准确的感知结果。
最后,为了提高任务完成率,可以采用多智能体系统中的任务调度和资源分配策略。
在移动群智感知过程中,智能体之间的任务分配和资源利用对任务完成率起着至关重要的作用。
可以根据智能体的能力、资源和位置等因素,制定合理的任务调度和资源分配策略。
例如,可以采用分布式的任务分发算法,将感知任务分配给离任务区域最近的可用智能体,减少任务完成的时间和能量消耗。
综上所述,基于多智能体系统的移动群智感知协同优化策略可以有效提高移动群智感知系统的能源效率、数据质量和任务完成率。
通过合理利用多智能体之间的协作和信息交流机制,可以充分发挥感知设备的潜力,提供更为准确高效的感知结果,为智能交通、环境监测等领域的应用提供强有力的支持。
面向移动群智感知的位置隐私保护研究
面向移动群智感知的位置隐私保护研究移动群智感知(Mobile crowdsensing, MCS)作为一种新兴的数据收集方法,将传感器网络和移动设备的普及性结合起来,为社会提供了丰富的感知数据。
然而,随之而来的是移动群智感知中涉及到的位置隐私保护问题。
位置隐私保护是指在移动群智感知过程中保护用户位置信息的一种技术手段。
用户的位置信息包含个人敏感信息,如居住地、工作地等。
如果这些敏感信息未经保护地泄露出去,将可能导致用户隐私严重受损甚至面临潜在的风险。
因此,提出有效的位置隐私保护方法,是移动群智感知研究中的重要课题。
首先,为了保护移动群智感知参与者的位置隐私,研究者提出了一种基于位置扰动的方法。
该方法通过对位置信息进行干扰处理,对用户位置进行一定程度上的模糊化,从而一定程度上减少了敏感位置信息的泄露风险。
这种方法具有较好的位置隐私保护效果,但也有可能会引发位置信息的失真问题,影响感知数据的准确性导致结果的不可信。
在位置扰动方法的基础上,研究者们提出了一种自适应的位置隐私保护策略,即根据用户的位置敏感程度动态调整位置扰动的强度。
这种策略可以根据用户的需求和敏感信息的重要性来灵活地确定扰动的程度,从而达到位置隐私保护和感知结果的平衡。
此外,为了进一步提高位置隐私保护效果,研究者还提出了一种基于集合覆盖的方法。
该方法通过结合不同用户的位置信息,将位置请求分散到多个参与者中,从而难以唯一确定某个用户的具体位置。
这种方法能够在一定程度上保护用户位置隐私,但也带来了新的问题,如成本和效率的降低。
针对以上问题,研究者们还提出了一种隐私保护的差分隐私方法。
差分隐私是一种保护个体隐私的技术手段,通过在发布的感知数据中引入一定程度的随机噪音,来保护用户的位置隐私。
这种方法可以有效减少敏感信息的泄露风险,并保证感知结果的准确性。
但需要注意的是,在应用差分隐私方法时需要权衡隐私保护程度和数据使用效果之间的平衡,以兼顾用户隐私和社会效益。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
拼图: 通过移动群体感知重建室内平面图Ruipeng Gao1, Mingmin Zhao1, Tao Ye1, Fan Ye1,2, Yizhou Wang1,Kaigui Bian1, Tao Wang1, Xiaoming Li1EECS学校,北京大学,北京,100871,中国ECE部门,石溪大学石溪分校,11794,纽约,美国摘要缺少平面图是目前室内定位服务可用性不强一个关键原因。
服务提供者必须通过与建筑运营商进行费力耗时的商务谈判,或聘请专门人员收集这些数据来提供服务。
在本文中,我们提出拼图,一个平面图重建系统,它利用了来自移动用户的群体感知数据。
它从用户拍摄的图片中提取个人地标对象的位置、大小和方向信息。
还可从惯性传感器数据中获得对象的空间相邻关系,然后在最初的平面图上计算这些对象的坐标和方向。
通过结合用户移动性痕迹和位置的图像,它能产生完整的反映走廊连接情况,房间大小和形状的平面图。
我们在3层的2个大型商场的实验显示,地标对象的位置错误90%在1到2米,方向错误在5到9度。
关键字室内平面图重建;移动群体感知1.介绍与在户外几乎无处不在的报道相比,室内定位服务充其量只是零星。
该行业最先进的,谷歌室内地图[2],覆盖全球10000个地点,只是全球数以百万计的室内环境的一小部分(如:机场、火车站、购物中心、博物馆和医院)。
无处不在的覆盖范围的一个主要障碍是缺乏室内平面图。
服务提供者必须与业主或运营商进行费力耗时的商务谈判来收集平面图,或者等待他们主动上传这些数据。
这都不利于在短时间内大规模覆盖。
在本文中,我们提出了拼图,利用移动用户的群体感知数据构造复杂的室内环境的平面图。
它避免了服务提供者在商务谈判过程中的密集努力和时间开销,使他们不需要一个接一个地跟业主/运营商谈论,或聘请专门人员一寸一寸地测量室内环境。
这开辟了快速和可伸缩的平面图重建的可能性。
移动群体感知的概念越来越受欢迎。
最近的工作用群体感知数据本地化用户和减少校准WiFi签名的工作。
等[14日22日26日27日],室内群体先驱者努力构建走廊/房间的形状和平面图的连接。
它使用惯性数据构建,结合用户流动痕迹可获得平面区域的近似形状。
然而,存在改进的空间。
惯性数据不能提供室内POIs的准确坐标和方向(如:商场的存储仓入口,从今以后称为地标),它是引导用户的关键。
由于在航迹推算时误差积累,“锚点”(如入口/出口电梯/自动扶梯/楼梯和带有GPS接收器的位置)独特的传感数据签名需要在移动痕迹上正确的移动。
但在许多大型室内环境这样的锚点可能太稀疏,而不能提供足够的修正。
因此在易受影响的地区很容易发生高估和低估,例如: 当一个跟踪移进墙壁,或存在用户很少走进的角落。
拼图结合了计算机视觉和移动技术,并使用优化和概率公式建立相对完整和准确的平面图。
我们使用计算机视觉技术来提取各个地标图片的几何特征(如:商店入口的宽度、长度和相邻墙的方向)。
然后我们设计数据收集的微观任务的几种类型,每个用户可以采取一系列的行动来收集数据,对构建平面图特别有用。
我们从惯性数据获得相邻的地标之间的相对空间关系,并且在常见的平面图上计算地标的最佳坐标和方向。
然后用户另一种微观任务类型的移动性痕迹被用于获得走廊的连接,方向和房间形状/大小,使用组合优化和概率占用技术。
拼图设计基于计算机视觉的实现和移动技术,具有互补优势。
当地区有稳定和不同的视觉特性时,视觉可以产生准确的几何信息。
这适用于那些由标志、装饰构成丰富的特性的地标,并且他们的位置的详细信息/方向是可以获得的。
移动技术只给出地区的草图,它的计算开销低得多,这适用于中间部分如纹理少或玻璃幕墙,这里的只有很少的稳定特性存在,而更少的详细信息是必需的。
因此我们利用“昂贵”的视觉技术来获得更精确和详细的个人信息地标,并使用“便宜”惯性数据在一个大,常见的楼层平面获得地标的位置,获得关键的走廊和房间信息。
优化和概率公式给我们更加坚实的基础和更好的实力来消除错误数据。
我们在这个工作上做出了以下贡献:•我们确定合适的计算机视觉技术,设计一个地标建模算法, 输出由获得主要的坐标几何特性的地标图像(如:仓库入口和相邻墙段),和相机在当地坐标系统构成。
•我们设计微观任务来衡量地标之间的空间关系,并设计地标的放置算法,使用最大似然估计(标定)公式来计算最优坐标和常见平面图上的地标的方向。
•我们设计一些使用组合优化配方重建墙边界的增强算法,并使用健壮的概率入住率地图获得走廊连接和方向,房间大小/形状。
•我们开发一个原型,在三层楼高的两大复杂的室内环境开展广泛的实验。
结果表明,90%情况下,地标的位置和方向错误约1∼2米和5∼9度,拓扑连接100%正确,这表明了我们的设计的有效性。
请注意,我们不主张发展新的计算机视觉技术。
我们的主要贡献是用新方法识别和结合适当的视觉和移动技术来适用于平面图的构建,和相应的数学公式,以及提精度大大提高的解决方案,尽管图像和惯性数据有错误和噪声。
剩下的论文的组织下:我们给出概述(第二节),然后3、4和5部分展示地标模型的设计,位置和增强算法。
第六节,我们进行设计的实验评估和展示其有效性。
第7节,讨论局限性,第8节,比较相关工作,第9节,总结本文。
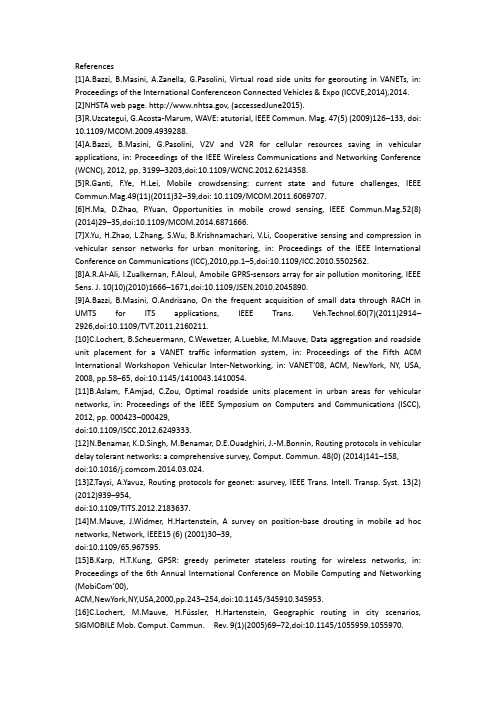
2.设计概述图1:拼图包含三个阶段:里程碑式的建模,地标的位置和地图增大。
每个阶段使用图像或惯性数据和前一个阶段的输出。
拼图利用图像、加速度和陀螺仪数据。
重建包括三个阶段:里程碑式的建模、位置和增大(图1)。
首先,两个计算机视觉技术,结构与运动(SfM)[29]和消失线检测[18],用于获取主要几何尺寸和坐标测量的每个里程碑式的局部坐标系(第三节)。
SfM也生产每个图像的摄像机的位置和方向,有效的本地化用户的照片。
接下来,两种类型的微观任务,Click-Rotate-Click(CRC)并单击- Walk-Click(CWC),用于收集陀螺仪和加速度数据测量的距离和方向地标之间的区别。
测量作为约束的标定公式来计算最可能的坐标和方向的地标在全球坐标系统(第四节)。
最后,组合优化是用于连接地标的相邻在身。
不同于投机取巧的数据采集采用现有的大部分工作(3、23、34岁,38),我们假设用户主动进行不同的数据收集微观任务需要一些努力。
每个micro-task定义了一个或几个行动收集不同的数据在特定的空间区域和时间的持续时间。
例子包括:单个的照片存储入口;在一个商店,然后旋转身体的照片拍照的另一个商店,走一定的轨迹而照片之前/之后立即散步。
这种微观任务让我们收集数据有用的在特定的阶段。
我们假定服务提供商有一定的激励机制[37]奖励的用户他们的努力,和我们不考虑故意垃圾邮件在这工作。
3.具有里程碑意义的建模在本节中,我们描述了我们如何提取主要几何特性(如大小和坐标。
、商店入口的宽度、长度/方向相邻墙)的地标图片。
3.1具有里程碑意义的模型我们使用一个非常简单的模型来描述一个里程碑的主要几何特征。
如图2所示,一个里程碑用L =(P,Q),P在哪里的主要几何顶点地标(如。
的四角P1∼P4商店入口),和Q连结点的相邻墙段在地板上(如,Q1∼第三季度两墙段)。
每个里程碑都有局部坐标系,它的起源C在商店的入口线P3P4的中心。
x轴是共线的−−→CP4,x - y平面一楼和三轴遵循右手定则。
我们利用两个计算机视觉技术的输出,结构与运动(SfM)[29]和消失线检测[18],获得P的坐标,问从地标图片。
结构与运动是一个成熟的计算机视觉技术常用来构造对象的三维模型。
给定一组图像(如相同的对象。
从不同角度、建筑),它产生:1)“点云”组成的许多点在当地的3 d坐标系统。
对象上的每个点代表一个物理点1;2)构成(即。
,3 d 坐标和方向)的每个图像的相机,这有效地定位相机/用户采取这一形象。
然而,只使用SfM和原有室内平面图可能不是最佳匹配重建。
首先,SfM依靠大量均匀分布的稳定和独特的形象特征的详细和准确的三维模型重建。
尽管地标本身通常享受丰富的功能由于标志,装饰,许多中间部分(如太少。
室内(如textureless墙)。
、透明的玻璃墙)或动态(如。
移动客户)特性,SfM可能处理不好。
第二,生产的“点云”SfM不是我们需要构建地图。
我们仍然需要得到的坐标几何特性在我们的模型中,如角落的一个入口。
3.2几何顶点的坐标获得所需的主要几何顶点坐标的模型,我们将探讨两阶段算法。
首先,我们使用现有的消失线检测算法[18]产生线部分为每个图像相同的里程碑(图3 b)。
我们共线的合并和并行段相互接近到长串段(图3 b)。
这是通过使用一个转角阈值和两个线段之间的距离阈值,并设置两个阈值经验。
合并重复所有线段对,直到没有进一步的合并是可能的。
我们过滤掉剩下的短片段,只留下长期的。
接下来,我们项目合并 2 d长队从每个图像到三维坐标系使用转换矩阵由SfM[29]。
然后,我们使用一个k - means算法适应集群预计3 d线分成组根据他们的距离在3 d,并将每个集群合并为3 d线段。
这给可能的3 d轮廓线的地标。
相交点的计算主要几何顶点。
上面的算法解决的一个实际的问题是从相对极端的角度拍摄的图像。
长轮廓线(如。
,P1P2在图2)可能成为短段等图片。
因为大多数的图像或多或少的前面和中心,真正的轮廓线后将有足够数量的长队段合并和投影。
因此第二阶段聚类可以识别它们,同时删除“噪音”从极端的角度的图像。
由于同样的原因,我们发现墙段连接的坐标点远离中心并不准确。
这只是因为大多数图像将覆盖(如中心的地标。
、存储入口),但可能会错过一些周边地区更远。
接下来,我们使用一个更可靠的方法来得到墙连结点的坐标。
3.3连结点ofWall段我们项目里程碑式的3 d点云到地板上飞机,并搜索密集分布的点线形状找墙段和他们的连结点。
这是因为特征点在同一垂直面上的投影/墙将会下降到加入行地板(如。
,P3Q1墙段相邻入口左边)。
我们从一些几何顶点计算之前(例如,P3P4入口处墙上的投影线在图2中,在图4)标记为两个钻石,然后找到两端(如。
标记为两个十字架在这堵墙的图4)。
从两头寻找下一个连接点继续,直到没有一根线组成的密集分布的点可以被发现。
图4显示了三个墙连结点发现。
3.4 例子图4显示了一个商店入口的点云投射到地面的平面和SfM生产相机的位置。
我们纪念几何顶点(钻石)和墙壁连结点(十字架)。
在这个例子中,入口有一个错误的宽度0.086米(4.78%的真正的宽度1.8米)。
我们还发现两个沿着走廊外墙部分,和他们的转角误差是90年的0.08◦◦(0.09%)。
我们发现176年的相机位置由SfM(只显示其中一些)是相当准确的。
定位误差百分比90%,1.2米以内,最大误差为1.5米。
我们testhowthe SfM图像影响的定位性能。