纳米级定位精度一维位移工作台
纳米级精度光刻机测距与定位技术
纳米级精度光刻机测距与定位技术
芯片制造需要纳米级精度的光刻机,而制造一台高精度的光刻机需要纳米级精度的测距与定位技术的支持。
这里要用到双频激光干涉仪。
而双频激光干涉仪一般只能用于光刻机的测距,不能直接用来定位。
这是因为双频激光干涉仪靠多普勒频移来测距的,所以只有在动镜移动的时候读出移动的距离。
实际加工中需要多次对晶圆进行镀膜和光刻,一但晶圆离开光刻机工作台就无法再用双频激光干涉仪再次定位,所以要对双频激光干部涉仪进行改进。
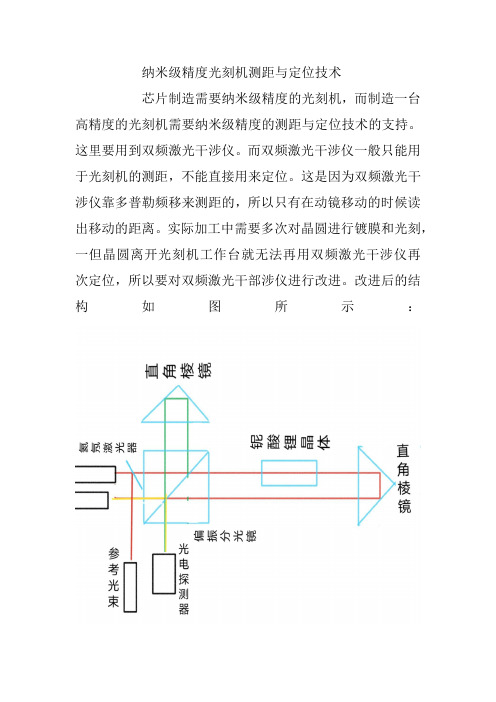
改进后的结构如图所示:
先由激光器发出单频激光经偏振分光镜分成两束光,一束经过直角棱镜返回偏振分光镜,另一束经过电光晶体铌酸锂进行频率调制后经直角棱镜返回偏振分光镜,两束不同频率的激光束在偏振分光镜汇合后产生一个脉冲信号,我们可以以铌酸锂晶体通电时间算起,到光电接收器接收脉冲信号结束,来记录激光在动镜之间通过的脉冲数,即可计算出激光通过的距离。
这是一种静态读数双频氦氖激光干涉仪,就是双频氦氖激光干涉仪的动镜在处于静止时就可以读数。
这样就可以给晶圆多次定位了。
要说明的是晶圆需要与动镜固定在一起,直到晶圆全部加工结束才能取下动镜。
防止晶圆与动镜的相对位置发生偏移。
好了,关于光刻机的测距与定位就讲到这里,谢谢大家。
纳米级精密定位工作台研究

(School of Mechanical Engineering, Tongji Unive rsity, Shanghai 200092, China)
Abstract : To guarantee the performance of precision presses , it is of necessity to improve the positioning precision. A working table with six-dimensional degree of freedom is presented via selecting suit able m a terials . M oreover , con st rain t s upon p r ecise p os it ion in g are tackled. In favor of error analysis, relevant structural parameters are consequently obtained to meet technical requirements of the positioning table. Key words : piezoelectric actuator ; flexible hinge ; freedom
第 4 卷第 4 期 2006 年 10 月
中 国 工 程 机 械 学 报
CHINESE JOURNAL OF CONSTRUCTION MACHINERY
V ol . 4 No . 4
Oct . 2006
纳米级精 密定 位 工作 台研 究
陆敏询, 刘俊杰
(同济大学 机械工程学院, 上海 200092)
一维工作台设计说明书

电子精密机械设计课程设计一维伺服移动工作台设计说明书(仅供参考)目录课程设计任务2设计任务介绍2设计内容2 一、分析工作条件和设计要求 3 二、电机选型3三、滚珠丝杠的选型4四、联轴器的选型9五、转矩讨论10六、电机的校核12七、联轴器校核13八、导轨选型13九、轴承的校核14十、轴承的校核18十一、系统谐振频率计算18十二、光栅的选型19附录20课程设计任务一、设计任务介绍:一维伺服移动工作台整体结构为完成一维伺服移动工作台的设计,需设计的机械系统包括:伺服电机、减速器、联轴器、滚珠丝杠、直线导轨、光栅传感器等。
设计内容一维工作台整体结构:一维工作台整体结构由于工件重量(100N),工作台轴向载荷(300N)均很小,初选不考虑减速器。
一、分析工作条件和设计要求给定参数:工作台承重载荷:=100N,工作台轴向载荷:=300N,工作台最大移动速度:=0。
5m/s,有效行程:S=900 mm,加速时间常数:t=0.1s,加速度:a===5m/,重力加速度g=9。
8N/kg.1.工作台设计尺寸为:400×200×20mm,选用2A11,根据结构设计,工作台质量:=kg,∴载荷=+g=100+56.99=156.99N,∴根据经验,暂定采用双导轨4滑块,滑块质量为0.4kg。
二、电机选型整体质量M=++=100÷9。
8++1。
113=17.13kg,a.摩擦力,滚动导轨摩擦系数μ∈[0。
003,0。
005],取μ=0.005;=Mgμ=17。
13×9。
8×0。
005=0。
84N,b.惯性力=M=17.13×=85.665N,最大轴向力=++=0。
84+85.665+300=386。
505N,最大功率==386。
505N×0.5=193。
25W,查机械设计手册P579:取,,,取安全系数为2电机所需功率,选择电机,见松下电机手册P57:AC200 V用,额定转速3000r/4500额定转矩为2。
精密仪器中的纳米级位移测量技术研究
精密仪器中的纳米级位移测量技术研究近年来,随着科技的不断进步和应用的不断扩大,精密仪器的需求也日益增长。
在许多领域,如生物医学、材料科学和电子工程等,需要对微小的物体进行精确的位移测量。
而纳米级位移测量技术的发展,为这些领域带来了革命性的变化。
纳米级位移测量是一种能够测量物体在亚微观尺度上的位移变化的技术。
它能够精确定位物体的位置,甚至超越传统测量方法的能力。
这种精密度的提高对于很多需要高精度控制和测量的领域来说非常重要。
在纳米级位移测量技术的发展过程中,有几种常见的方法和仪器被广泛应用。
其中之一是激光干涉仪。
激光干涉仪通过利用激光干涉的原理,测量被测物体的位移。
它的工作原理是通过将激光束分成两束,分别照射到待测物体上,然后再将两束光束合并,形成干涉条纹。
通过分析干涉条纹的变化,可以测量物体的位移。
此外,扫描探针显微镜也是一种常用的纳米级位移测量技术。
扫描探针显微镜利用微小探针进行扫描,测量物体表面的形貌和位移。
它的工作原理是将探针靠近待测物体表面,然后通过探针的运动轨迹来测量位移。
在纳米级位移测量领域中,经常出现的一个问题是环境噪音对测量结果的干扰。
由于纳米级位移测量对环境的要求非常高,任何微小的振动或者温度变化都可能引起测量误差。
因此,研究人员常常需要采取一些措施来降低环境噪音的影响。
一种常见的方法是在位移测量过程中使用隔离系统。
隔离系统可以将待测物体与外界环境隔离开来,减少外界振动和噪音对位移测量的影响。
常见的隔离系统包括空气悬浮系统、弹簧隔振系统和电磁悬浮系统等,它们能够有效地提高纳米级位移测量的精度。
此外,信号处理技术也是纳米级位移测量中很重要的一部分。
由于真实的测量信号往往包含大量的噪音,需要采取一些信号处理的算法来提取出有效的位移信号。
脉冲耦合神经网络(PCNN)是一种常用的信号处理方法,在纳米级位移测量中有着广泛的应用。
它可以通过神经网络模拟人脑的信息处理方式,更加准确地提取出位移信号。
一维伺服移动工作台设计说明书电子精密机械设计课程设计
一维伺服移动工作台设计说明书学校名称:上海大学学院专业:机自学院精密机械系设计队员:指导老师:二〇〇一一年十二月目录课程设计概述 (2)课程设计任务 (2)1.设计任务介绍: (2)2.设计参数 (3)3.设计内容简介 (3)课程设计 (4)1一维工作台整体结构 (4)2.各部分选型 (4)1)电机的选型 (4)2)滚珠丝杆的选型 (7)3)支撑单元选择 (16)4)联轴器选择 (17)5)转矩探讨 (17)6)电机的校核 (20)7)联轴器校核 (20)8)导轨的选型 (21)9)轴承的校核 (22)10)系统精度计算 (25)11)系统谐振频率计算 (27)12)光栅的选型 (28)附录 (28)课程设计概述本次专业课程设计要求我们掌握电子精密机械设计方面的基础知识,并能独立运营电子精密机械设计的基本理论、基本方法、进行有关电子精密机械方面的设计。
通过本次专业课程设计使我们熟悉机械系统的方案论证过程,包括取得方式比较、传动形式的确定等;学会采用AUTOCAD进行机械设计,达到较熟悉程度;利用学过的基础理论,在设计实践中进行载荷的分析计算、电机的选择、传感器的选择、传动链的分析计算、传动系统的精度、谐振分析;综合运用有关课程如机械制图、公差与技术测量、热处理、机械设计、机械原理传感器技术等所学的知识来解决工程实际问题。
从而培养我们的自学能力、独立工作能力、协作精神和创新精神,为以后的毕业设计打好基础。
课程设计任务1.设计任务介绍:图1-1 一维伺服移动工作台整体结构为完成一维伺服移动工作台的设计,需设计的机械系统包括:伺服电机、减速器、联轴器、滚珠丝杠副、直线导轨、光栅传感器等。
工作台的承重载荷0300G N =;工作台的轴向载荷060F N =;工作台的最大移动速度max 0.2/V m s =;工作台的有效行程S 600mm =;加减速时间常数0.15t s =;2a 1.33m/s ⇒=加速度3.设计内容简介一维工作台整体结构 电机的选型 滚珠丝杆的选型 支撑单元选择 联轴器选择 转矩探讨 电机的校核 联轴器校核 导轨的选型 轴承的校核 系统精度计算 系统谐振频率计算 光栅的选型课程设计1一维工作台整体结构考虑到工件重量(300N ),工作台轴向载荷(60N )J 均很小,初选不考虑减速器。
一维数控工作台设计
一维数控工作台设计一维数控工作台是一种工业设备,用于在一维平面上进行各种加工工作。
它通过计算机控制系统,可以自动进行加工操作,具有高精度、高效率和稳定性等特点。
设计一维数控工作台需要考虑加工需求、机械结构、控制系统和人机交互等方面。
首先,设计一维数控工作台需要确定加工需求,即确定需要加工的工件材料和形状。
不同的工件材料和形状对加工设备的要求不同,需要根据具体的加工需求来确定一维数控工作台的规格和功能。
接下来,设计机械结构是设计一维数控工作台的关键。
机械结构包括机床床身、导轨、滑块、传动系统等部分。
机床床身应具有足够的刚度和稳定性,以保证加工过程中的精度和稳定性。
导轨和滑块应具有低摩擦、高精度和高刚度,以保证加工过程中的运动平稳和精度。
传动系统可以采用丝杆传动、齿轮传动或皮带传动等方式,根据加工需求和要求选择合适的传动系统。
设计控制系统是实现数控操作的关键。
控制系统由计算机、数控软件、运动控制卡和执行器等部分组成。
计算机通过数控软件生成加工程序,将加工程序传输给数控系统,数控系统通过运动控制卡控制执行器实现运动控制。
控制系统需要具有可编程性、精度高和稳定性好的特点,以满足不同加工需求和加工要求。
最后,设计人机交互界面是保证操作方便和安全的关键。
人机交互界面包括显示屏、键盘、鼠标和控制按钮等部分。
显示屏用于显示加工程序和加工过程,操作人员可以通过键盘、鼠标和控制按钮进行操作控制。
人机交互界面需要设计合理、直观易用,以提高操作效率和操作便利性。
总结来说,设计一维数控工作台需要考虑加工需求、机械结构、控制系统和人机交互等方面。
通过合理的设计和配置,可以实现高精度、高效率和稳定性的加工操作,提高生产效率和产品质量。
压电陶瓷驱动的微位移工作台建模与控制技术研究
压电陶瓷驱动的微位移工作台建模与控制技术研究一、本文概述随着科技的快速发展,微位移技术作为精密工程领域的关键技术之一,在光学、电子、生物医学、航空航天等众多领域发挥着越来越重要的作用。
微位移工作台作为实现微位移操作的重要设备,其性能直接影响到相关领域的精密加工和测试精度。
压电陶瓷驱动的微位移工作台因具有响应速度快、位移分辨率高、控制精度高等优点,成为当前研究的热点。
本文旨在深入研究压电陶瓷驱动的微位移工作台的建模与控制技术,以提升其运动性能和稳定性。
我们将对压电陶瓷的基本特性进行分析,建立其精确的数学模型,为后续的控制算法设计提供理论基础。
在此基础上,我们将研究压电陶瓷微位移工作台的动态特性,分析影响其运动精度的主要因素,并提出相应的补偿策略。
本文将重点探讨压电陶瓷微位移工作台的控制技术。
我们将研究并比较不同控制算法在压电陶瓷驱动系统中的应用效果,如PID控制、模糊控制、神经网络控制等,以找到最适合压电陶瓷微位移工作台的控制方法。
同时,我们还将研究如何结合现代控制理论,如自适应控制、鲁棒控制等,进一步提高微位移工作台的动态性能和稳定性。
本文将通过实验验证所提出建模与控制技术的有效性。
我们将搭建压电陶瓷微位移工作台的实验平台,进行动态性能测试和控制算法验证,以评估所提出技术的实际应用效果。
通过本文的研究,我们期望能够为压电陶瓷驱动的微位移工作台的设计和应用提供有益的参考和指导。
二、压电陶瓷驱动技术基础压电陶瓷,作为一种功能陶瓷材料,具有独特的压电效应,即在受到外部机械力作用时会产生电荷,反之,当受到电场作用时则会发生形变。
这种特性使得压电陶瓷在微位移控制领域具有广泛应用。
压电陶瓷驱动器(Piezoelectric Ceramic Actuator, PCA)利用压电陶瓷的逆压电效应,通过施加电压实现陶瓷材料的微小形变,从而驱动负载产生微位移。
压电陶瓷驱动器的优点显著,包括响应速度快、位移分辨率高、驱动电压低、结构紧凑且易于集成等。
一种用于光纤F-P传感器的微纳米级微位移工作台的研究
J n. 0 6 u 2 0
种用 于光 纤 F P传 感器 的微 纳米 级 微 位 移 — 工 作 台 的研 究 一雷小华 源自 国平 陈 星 朱 永 陈伟 民
( 庆 大 学 光 电技 术 及 系统 教 育 部 重 点 实 验 室 重 庆 重 ( 庆市计 量技术研究所 重 重庆 404 ) 0 0 4 404 ) 0 0 4
移 工 作 台 的不 确定 度 为 0 1 m。 .
关键词
标定
工 作台
微 位移
光纤 F P传感 器 —
4 0 4 2 6 .0 0
中图分类号
TM9 文 献 标 识 码 A 国 家 标 准 学 科 分 类 代 码 3
S u n a N o e o kt b e o no m i r n O r r Ba e n t e t dy o v lW r a l n Na - c o de s d o h
摘要
标定光纤 F P传感器这种微纳米级位移传感器非常 困难 。 — 分析常用的微位移技术优缺点 , 这里提 出了一种基 于弹性变
形原理的工作台的设计方法。 建立 了工作 台位移变形 的数学模 型, 对其产生位移的误差进行 了理论分 析。 在此基础上 , 实际设
计 并 开 发 了 实 验 系 统 , 德 国 h i n ay 用 ed h in光栅 位 移 传 感 器对 光纤 F P传 感 器 进 行 了标 定 实 验 。 量 的 标 定 实 验 证 明 , 微 位 e — 大 该
机与机械式 位移缩小 机构驱 动的微位 移机 构、 涡轮蜗
1 引
言
杆机构 等。压 电陶瓷 驱动 的微位 移机构行程小 , 一 般为几 十微 米 , 其严重 的非线 性 、 迟滞 、 漂移现 象等使 得精度只能达到微米级 , 很难在此基础上有所提 高。 对
纳米级微动工作台的研究现状及发展趋势
基金项 目: 国家 自然科学基金项 目(0 7 186 5 5 5 ) 浙江 省自然科 学基金青年人 才项 口( 5 3 9 ) 5253 、 705 , 0 R 0 17
作者简介:雷 勇( 9 9一 ) 男 , 17 , 四川 内江人 . 硕士研究生 . 研究方 向为微运 动技术 。
综述, 对现有的 纳米级微 动工作 台的工作原理 、 性能特点和 可实现的运动 范 围及精 度进行 了分析 比较 , 此基础上 。 在 对纳米级微 动工作 台的发展趋 势做 了展 望。 关键词 : 米科技 ; 纳 磁悬浮 ;微动 工作 台 ;高精度 ;大范 围
中图分 类号 : H13 3 T 3 . 文献标识码 : A
维普资讯
第 1期
雷 勇等: 纳米级微动工作台的研究现状及发展趋势
7 3
移器 上施 加 电压时 , 由于 四连 杆受 力 而变形 , 得两个 方 向的 获 微 位移 。其优 点如 上所 述 , 可 以在单 层上 实 现 两 个 方 向的 但 微动。
最 大工作 速度 为 4 m / , 0 m :定位 精度 ± . m。 s 01
13 滑动 导轨式微动工作台 .
典 型的采用 两级 丝杆 驱 动滑 动导 轨实现 微 位移原 理 示 意
图 1 单 层 — Y弹性 微 动 上 作 台
图¨ 见图3 第一级用交流 电机驱 动的丝杆 机构可 以达 , 到 ± . T的定位精度 , 05 l l 通过二级 制动器对第 一级位置 误 差进行 补偿 , 可实现 ±lm 的定 位精度 。 n
12 滚 动导轨 式微 动二 台 . [ 作
滚动导轨也是微动工作台中一种常见 的导轨形式 , 它具 有行程大, 运动灵活 、 结构简单 、 工艺性好 、 容易实现较高的定 位精度的优点 , 2为采用滚珠导轨作 为微动工作 台的支承 图 和导 向元件, 直流伺服电机传动 、 实现了对 自动分步重复光刻 机 的微定 位控制 ¨ 。该微 动 台运 动范 围为 、 向 10 m, Y方 5m
一种提高显微数控平台控制精度的细分驱动算法
一种提高显微数控平台控制精度的细分驱动算法邓耀华;吴黎明;张力锴;陈景郁;苏振锐【摘要】高精密显微数控工作台是IC晶片自动光学检测的核心部件之一,其运动精度直接影响光学检测设备的分辨力,工作台的运动速度和加速度会影响整个IC晶片检测的工作效率.首先给出了高精度工作台的机械设计和工作台嵌入式控制结构,然后针对工作台的驱动精度进行研究,深入分析了驱动电机细分控制中的正余弦细分控制方法,使用细分表查表算法进行计算,分析了查表法存在的不足方面,提出了多级细分控制算法,利用圆的多边形逼近算法动态计算细分电流值,保证了高次细分情况下电机线圈电流矢量的均匀性,使得微步距角的分配更均匀,有效的提高了工作台运动的平稳性和控制精度,为IC晶片的精密检测提供了可靠的保证.【期刊名称】《机械设计与制造》【年(卷),期】2010(000)005【总页数】3页(P188-190)【关键词】IC晶片检测;高精度工作台;自适应细分;逼近算法;嵌入式【作者】邓耀华;吴黎明;张力锴;陈景郁;苏振锐【作者单位】广东工业大学,信息工程学院,广州,510006;华南理工大学,机械与汽车工程学院,广州,510643;广东工业大学,信息工程学院,广州,510006;广东工业大学,信息工程学院,广州,510006;广东工业大学,信息工程学院,广州,510006;广东工业大学,信息工程学院,广州,510006【正文语种】中文【中图分类】TH161 引言随着IC 晶片加工的工艺的提高,对现有的自动化检测方法提出了新的挑战,在运用视觉技术进行IC 晶片图像检测的场合[1],一方面可以通过扩大显微镜的视场来观察到更大范围的微细图像,另一方面用于固定IC 晶片的数控平台的运动精度必须达到一定的要求,目前国内外已有激光测量分辨率可以达到纳米级以下的工作平台[2]。
精密工作台控制技术涉及多个方面内容:工作台机械系统、运动控制系统、运动误差分析与控制、精密测量技术等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[ 6]
图6
0 1mm 范围的比对测量结果
k/ m 2
( 1) 图7 5 次测量累计误差曲线
为振动 角频率 ; k 为材料刚度 ; m 为
图8
5 次测量分段误差曲线
1. d = 1. 2m m 的三阶振动频率 3. d = 0. 8m m 的三阶振动频率 5. d = 1. 0m m 的二阶振动频率 7. d = 1. 2m m 的一阶振动频率 9. d = 0. 8m m 的一阶振动频率
[ 3]
早川伸哉 , I tir o O R , 系 魚川文広 , 等 . 微細放電付 着 加工 ! 材料堆 積 過程 觀 察 . 電氣加 工學 會 全國大會 講演論文集 , 2002, 14: 81~ 84
[ 4]
李勇 , 王显 军 , 郭旻 , 等 . 微细 电火 花加 工关 键技 术 研究 . 清华大学 学报( 自然科学版 ) , 1999, 39( 8) : 45 ~ 48
1. d = 0. 8mm
2. d = 1. 0mm
3. d = 1. 2m m
图4
不同柔性铰链长度 L 、 厚度 d 的 最大位移量
2. 2
动态特性仿真 由于压电陶瓷驱动器的固有频率较高, 一般
为 7~ 8kH z, 电路处理的 频率也较高。因 此, 微 定位系统的动态特性主要取决于由平行板柔性铰 链组成的弹性导向机构的固有频率, 对其进行仿 真分析, 对工作台的设计具有指导作用。 图 5 所示为不同长度、 厚度柔性铰链的一阶、 二阶、 三阶模态 AN SYS 仿真结果。图中 + 号 标出的是根据柔性铰链机构的力学模型得出的固 有频率公式计算出的固有频率理论值 , 以作为比 较。固有频率计算公式为
3
工作台定位精度的比对测量
为了检验工作台定位的准确性 , 采用双频激 光干涉测长仪和固定在工作台上的光栅测量系统 对工作 台 的位 移 进 行 比 对测 量。图 6 所示 为 0 1m m 范围的比对测量结果 , 测量时工作台每隔 0 01mm 左右移动一次。图 7、 图 8 所示分别为 5 次测量的累计误差曲线与分段误差曲线 , 其中累 计误 差 期 望 小 于 0 2 m , 分 段 误 差 期 望 小 于 0 05 m 。 图 9 所示为 1mm 范围的比对测量结果 , 测量
( I SEM X III) , Bilbao, Spain, 2001 ( 编辑 周本盛 )
米科学与技术等领域的发展, 使微位移机构得到 越来越广泛的应用。实际应用中除了要求有高的 定位精度 , 同时也希望有较大的位移范围[ 1] 。 目
收稿日期 : 2005 05 18
基金项目 : 国家自然科学基金资助项目 ( 50175037)
度下产生同等大小位移( 取 40 m) 所需的驱动力 ( 图 3) , 以及在材料最大允许应力范围内平行平 板产生的最大位移量 ( 图 4) , 计算时取最大允许 应力为材料屈服强度的 10%
[ 5]
。
1. d = 1. 2mm
2. d = 1. 0mm
3. d = 0. 8m m
图3
柔性铰链长度 L 、 厚度 d 与 驱动力 F 的关系
1. 工作台面 2. 柔性铰 ( 黑粗线为线切割轨迹 ) 3. 反射式衍射光栅 4. 精定位工作台 5. 叠层式压电陶瓷 6. 楔形块位移缩小机构
静态特性仿真分析 图 2 为位移量为 20 m 时的仿真图形。 为了比较弹 性
平板 式柔 性 铰 链 的 长度、 厚度不同对压 电陶瓷驱动力、 最大 位移量的影响 , 仿真 计 算 时 比 较 了 0 8m m 、 1m m 、 1 2m m 3 种 厚 度 的 弹性 平板 在 不 同 长
2. d= 1. 0mm 的三阶振动频率 4. d= 1. 2mm 的二阶振动频率 6. d= 0. 8mm 的二阶振动频率 8. d= 1. 0mm 的一阶振动频率
图 9 1mm 范围的比对测量结果
图5
不同柔性铰链长度 L 、 厚度 d 的 模 态分析
时工作台每隔 0 1m m 左右 移动一次。图 10、 图 11 所示分别为 3 次测量的累计误差曲线与分段 误差曲线 , 其中累计误差期望小于 0 5 m, 分段 误差期望小于 0 2 m 。 同样 , 在 6mm 运动范围内 获得了工 作台每 117
由图 3 所示的仿真结果可知 , 在产生同等位 移量的前提下 , 所需的压电陶瓷的驱动力随柔性 铰链长度的增加而减小, 在弹性平板长度相同时, 驱动力随平板厚度的增大而增大。图 4 则说明了 柔性铰链的厚度越小 , 长度越大, 能够达到的位移 量也越大。
纳米级定位精度一维位移工作台
戴
蓉
谢铁邦 常素萍
图2 输出 20 m 位移量
图1
工作台结构示意图
工作台的 精定位级采用压 电陶瓷作 为驱动 器, 推动 4 个对称设置的折叠式平行平板柔性铰 链, 使工作台只产生垂直方向的微位移。 工作台的粗定位级由楔形块位移缩小机构及 步进电机组成。步进电机通过丝杠推动上楔形块 移动 , 该位移量以 10 1 的缩小比例推动工作台 沿滚动导轨在垂直方向产生位移。 作为位移测量传感器的衍射光栅固定在工作 台上 , 减小了测量的阿贝误差。衍射光栅刻线密 度为 1200dpi/ m m, 光栅常数 d = 0 833 m 。光栅 光路的设计使垂直入射的激光束经过两次衍射, 采用 1 级衍射光形成干涉条纹 , 因此, 干涉条纹 的周期为 d / 4= 0 208 m [ 3] 。采用四倍频细分辨 向电路对干涉条纹的 光电转换信号 进行初步细 分, 细分后的脉冲当量为 0 208 m / 4= 0 052 m, 该脉冲再送入计算机采用软件进行 60 倍细分 , 即 可达到 1nm 的分辨力。 工作时, 通过衍射光栅对工作台的位置进行 实时检测 , 并将检测结果反馈回计算机 , 与目标位 置比较, 然后控制步进电机驱动楔形块位移缩小 机构移动工作台, 直到与目标位置的差距小于一 定数值( 如 10 m) 后, 再通过计算机控制 16 位的 D/ A 转换器改变施 加于压电微位移器的驱动电 压, 直到工作台达到所要求的定位精度为止。压 电微位移器的驱动电压范围为 0~ 200V, 对应位 移量为 20 m, 则对于 16 位 D/ A, 压电微位移器 的理论分辨力可达 0 3nm 。可见, 通过粗精两级 定位机构的结合以及由衍射光栅传感器组成的位 移实时检测反馈控制系统 , 本设计的工作台可以 116
[ 5]
H ayakaw a S, Itir o O R, Ito ig awa F, et al. F abrica tion o f M icro structur e U sing EDM Depo sition. T he 13th Int er national Symposium fo r Electro maching
115
中国机械工程第 17 卷第 2 期 2006 年 1 月下半月
1
工作台系统设计
满足快速、 大范围的定位要求 , 同时又具有极高的 定位精度。
工作台包括粗精两级定位机构、 位置检测传 感器、 位移驱动器和信号处理与控制电路。图 1 所示为一维位移工作台的示意图。
2
精定位机构的有限元仿真
在以柔性铰链为传动机构的微动工作台的设
纳米级定位精度一维位移工作台
戴
蓉
谢铁邦 常素萍
纳米级定位精度一维位移工作台
戴 蓉1, 2 谢铁邦1 常素萍1
1. 华中科技大学, 武汉, 430074 2. 武汉理工大学, 武汉, 430070
摘要: 介绍了一种具有纳米级定位精度的一维位移工作台。 工作台采用粗精两级定位机 构, 可以实现 0~ 6mm 范围、 1nm 理论分辨力的快速、 高精度定位 ; 固定在工作台上的全息衍 射光栅实现了对工作台位移的高精度闭环检测。 采用 ANSYS 有限元分析软件对精定位工作 台进行了静态及动态特性分析 ; 采用双频激光干涉测长仪对工作台的定位精度进行了对比测 量。 位移工作台已用于表面三维形貌测量中 , 给出了对标准样板的测试结果。 关键词 : 柔性铰链; P ZT 驱动; 微位移工作台; 有限元分析 ; 3D 形貌测量 中图分类号 : T P24 文章编号 : 1004 132X( 2006) 02 0115 04 A One- dimensional Nano- positioning Stage Dai Ro ng Xie T iebang Chang Suping 1. H uazho ng U niversit y of Science & T echnolog y, Wuhan, 430074 2. Wuhan Univer sit y of T echnolog y, Wuhan, 430070 Abstract: A one dimension nano- posit ioning st age w as described. T he st age w as desig ned t o be as a set of t w o g rades, t hey w er e coarse and fine, microf eed m echanism and w as able t o realize 0~ 6mm larg e rang e o f m ot io n, 1nm po sit ioning r esolutio n. A reflect ing holog ram dif f ract ion grat ing w as fix ed t o t he stag e t o for m a closed loop displacem ent measuring syst em. T he f init e element method w as used t o analyze st at ic and m odal features of t he st ag e. T he positioning precision o f the stag e w as measured by a laser int erferom et er. T he stag e has been used t o const ruct a t hree dimensional surf ace pro filom et er and t he ex perimental result s are presented. Key words: f lexure hing e; P ZT act uato r; nano - posit io ning st age; finite elem ent analysis; 3D pro filer